This is a repository copy of Unified finite element methodology for gradient elasticity. White Rose Research Online URL for this paper:
http://eprints.whiterose.ac.uk/90078/ Version: Accepted Version
Article:
Bagni, C. and Askes, H. (2015) Unified finite element methodology for gradient elasticity. Computers and Structures, 160. 100 - 110. ISSN 0045-7949
https://doi.org/10.1016/j.compstruc.2015.08.008
Reuse
Unless indicated otherwise, fulltext items are protected by copyright with all rights reserved. The copyright exception in section 29 of the Copyright, Designs and Patents Act 1988 allows the making of a single copy solely for the purpose of non-commercial research or private study within the limits of fair dealing. The publisher or other rights-holder may allow further reproduction and re-use of this version - refer to the White Rose Research Online record for this item. Where records identify the publisher as the copyright holder, users can verify any specific terms of use on the publisher’s website.
Takedown
If you consider content in White Rose Research Online to be in breach of UK law, please notify us by
Unified finite element methodology for gradient
elasticity
Cristian Bagnia,∗, Harm Askesa
a
University of Sheffield, Department of Civil and Structural Engineering, Mappin Street, Sheffield S1 3JD, United Kingdom
Abstract
In this paper a unified finite element methodology based on gradient-elasticity
is proposed for both two- and three-dimensional problems, along with some
considerations about the best integration rules to be used and a
comprehen-sive convergence study. From the convergence study it has emerged that for
both two and three-dimensional problems, the implemented elements show
a convergence rate virtually equal to the corresponding theoretical values.
Recommendations on optimal element size are also provided. Furthermore,
the ability of the proposed methodology to remove singularities in statics
has been demonstrated through a couple of examples, in both two and three
dimensions.
Keywords: Finite element methodology; Gradient elasticity; Internal length scale; Fracture mechanics; Removal of singularity; 2D and 3D Finite
elements
∗Corresponding author. Tel.:+44(0)114 2227728; fax:+44(0)114 2227890
Email addresses: [email protected](Cristian Bagni),
1. Introduction
Classical continuum theories are used to solve various fundamental
en-gineering problems and applications. Even if these theories are capable of
solving problems in which the scale of the unknowns is appreciable by the
human eye, they have been used to characterise phenomena at a very small
(atomistic) as well as extremely big (astronomic) scale. Furthermore,
classi-cal elasticity has also been recently applied to describe deformation problems
at the micron and nano-scale.
Experimental observations have suggested that, at these two last scales
of observation, classical continuum theories fail in the accurate description
of deformation phenomena. In particular, classical theories produce
singu-larities in the strain and stress fields, for example in correspondence of crack
tips and dislocation lines. Furthermore, they are not able to capture size
effects, even if the influence of size effects increases with the decrease of the
component size.
The failure of classical continuum theories in the description of the above
problems is linked to the absence of an internal length in the constitutive
equations, representative of the underlying microstructure. To overcome the
previously described deficiencies, it has been proposed to enrich the
constitu-tive equations, through the introduction of high-order gradients of particular
state variable (e.g. strains or stresses), accompanied by internal length
pa-rameters (see [1] for an overview).
The idea of using gradient elasticity to describe the mechanical behaviour
of materials and structures dates back to the second half of the 19th century;
years (a comprehensive overview of the history of gradient elasticity can be
found in [1]).
Despite its ability to overcome the deficiencies of classical elasticity in
the solution of different problems, gradient elasticity has not found a
sig-nificant diffusion in practical applications yet. One of the principal reasons
is its non-trivial finite element implementation, mainly related to the
con-tinuity requirements imposed on the discretisation. In fact, while the
stan-dard equations of solid mechanics are usually second order partial differential
equations (p.d.e.), the governing equations of gradient elasticity are typically
fourth-order p.d.e.; this means that the discretisation of the gradient
elas-ticity equations requires at least C1-continuous shape functions, instead of
the usual C0-continuous shape functions, which cannot be straightforwardly
defined and implemented in a finite element methodology.
There are two main approaches followed to implement gradient elasticity
into a finite element methodology (for a more detailed overview see [1, 2]).
The first one comprehends approaches that leave the continuum mechanics
equations intact, by using Meshless methods [3–11], Penalty methods [12–
14], Hermitian finite elements [15–18], next nearest neighbour interaction
(instead of the simpler nearest neighbour interaction used in the standard
finite element software) [19], etc. The second one includes approaches that
transform the governing equations, in order to obtain less demanding
conti-nuity requirements; among these is the Ru-Aifantis theorem [20] which splits
the original fourth-order p.d.e. in two uncoupled sets of second-order p.d.e.
In this paper, we build on the finite element technology developed by [2,
point to develop a straightforward C0-continuous implementation. The work
of these earlier papers is extended from 2D to 3D and higher-order elements,
whilst also a comprehensive study of optimal numerical integration rules is
provided and in-depth convergence studies have been carried out. Thus,
rec-ommendations on element types and sizes can now be made.
While in Section 2 the Ru-Aifants theory, implemented in the proposed
methodology, is briefly reviewed, in Section 3 an effective C0 finite element
implementation of this theory is described. Section 4 provides details about
the best integration rules to use for each of the different implemented
fi-nite elements, whilst in Section 5 the convergence behaviours of the different
implemented elements are compared and analysed for problems without
sin-gularities and in Section 6 the same has been done for a problem characterised
by the presence of a singularity. Recommendations on optimal element size
are also provided. In Section 7 original results, obtained by applying the
proposed methodology to two different problems, are presented in order to
demonstrate the ability of the methodology to remove singularities from the
stress field for both two- and three-dimensional problems.
2. Ru-Aifantis theory of gradient elasticity
At the beginning of the 1990s, Aifantis and coworkers proposed to enrich
the constitutive relations of classical elasticity by means of the Laplacian of
the strain as [20, 22, 23]
σij =Cijkl(εkl−ℓ2εkl,mm) (1)
where σij and εkl are, respectively, the stress and strain tensor, Cijkl is the
equations are
Cijkl(uk,jl−ℓ2uk,jlmm) +bi = 0 (2)
where uk is the displacement field and bi are the body forces.
In a later work [20], Ru and Aifantis proposed an operator split, which allows the solution of the fourth-order equilibrium Eq. (2) as a decoupled
sequence of two sets of second-order p.d.e., that is
Cijkluck,jl+bi = 0 (3)
followed by the following reaction-diffusion equation
ugk−ℓ2ugk,mm =uck (4)
that represents the relation between the local displacements uc
i, obtained by
solving the equations of classical elasticity Eq. (3) (carrying for this reason
the superscript c), and the non-local displacementsugi, affected by the
gradi-ent activity (superscript g), which are the same displacements appearing in
Eq. (2).
Substituting Eq. (4) into Eq. (3), the original Eq. (2) are recovered and
imposing suitable boundary conditions the solution of Eqs. (3) and (4)
co-incides with that of the original Eq. (2). Nevertheless, the most interesting
aspect of Eqs. (3) and (4) is their uncoupled format, which significantly
sim-plifies both the analytical and numerical solution of the system of equations.
The first Ru-Aifantis approach introduces the gradient-enrichment in
terms of displacements, as given in Eq. (4), but through a simple
differ-entiation it is also possible to express the gradient-enrichment in terms of
strains [2, 24, 25], that is
εgkl−ℓ2εgkl,mm=εckl = 1 2(u
c
or stresses as [2, 26]
σijg −ℓ2σgij,mm =Cijkluck,l (6)
3. Finite element implementation
As briefly explained in Section 2 and in more details in [1], the Ru-Aifantis
theorem consists in solving two uncoupled sets of second-order p.d.e. instead
of the original fourth-order p.d.e., which significantly simplifies the solution
of the problem. From now on matrix-vector notation is adopted, instead of
the index notation used in Section 2.
The first step of the Ru-Aifantis theory consists in determining the local
displacements uc by solving the second-order p.d.e. of classical elasticity:
LTCLuc+b= 0 (7)
wherebare the body forces,Cis the constitutive matrix, while the derivative
operator L is defined as
L = ∂
∂x 0 0
∂ ∂y ∂ ∂z 0 0 ∂ ∂y 0 ∂ ∂x 0 ∂ ∂z
0 0 ∂
∂z 0 ∂ ∂x ∂ ∂y T (8)
The continuum local displacements uc =
uc
x, ucy, ucz
T
are expressed in
terms of the nodal local displacements dc =
dc
1x, dc1y, dc1z, dc2x, dc2y, dc2z, . . .
T
traditional shape functions Ni and can be written as:
Nu =
N1 0 0 N2 0 0 . . .
0 N1 0 0 N2 0 . . .
0 0 N1 0 0 N2 . . .
(9)
Considering the finite element discretisation just described and
integrat-ing by parts, the weak form of Eq. (7) reads
Z
Ω
BTuCBudΩdc ≡Kdc =f (10)
whereKis the stiffness matrix,Bu =LNu is the strain-displacement matrix
andf is the force vector, where the contributions of both the body forces and
the external tractions are included.
At this point, knowing the local displacementsuc from the previous step,
it is possible to evaluate the stress field by solving the second set of equations
(second step):
(σg −ℓ2∇2σg) = CLuc (11)
where σg is the non-local stress tensor and the derivative operator ∇ is
defined as ∇= ∂ ∂x ∂ ∂y ∂ ∂z
with ∇2 ≡ ∇T∇ (12)
Considering the weak form of Eq. (11) and integrating by parts, we obtain
Z
Ω
wTσg+ℓ2
∂wT
∂x ∂σg
∂x + ∂wT
∂y ∂σg
∂y + ∂wT
∂z ∂σg
∂z
dΩ −
−
I
Γ
wTℓ2(n· ∇σg)dΓ = Z
Ω
wheren = [nx ny nz]T contains the components of the normal vector to the
boundary Γ and w is the test function vector.
Since the same finite element mesh can be used for both the first step,
described above, and this second step, the same shape functions, previously
used to discretise the displacements, can be used also for the discretisation
of the stresses, making the solution of the problem much easier. Hence, the
vector of the continuum non-local stresses σg is related to the vector of the
nodal non-local stresses sg through the relation σg =Nσsg, where Nσ is an
expanded form of the shape function matrix Nu given in Eq. (9), in order to
accommodate all the non-local stress components.
Finally, using the same shape functionsNσ to discretise the test function
vector w and recalling that uc = Nudc, the resulting system of equations
reads
Z
Ω
NTσNσ+ℓ2
∂NTσ
∂x ∂Nσ
∂x + ∂NTσ
∂y ∂Nσ
∂y + ∂NTσ
∂z ∂Nσ
∂z
dΩsg =
=
Z
Ω
NTσCBudΩdc (14)
As can be noted, in passing from Eq. (13) to Eq. (14) the boundary integral
H
Γδσ
gTℓ2(n· ∇σg)dΓ has disappeared. This is due to the fact that
• if essential boundary conditions are used σg is known (usually the
condition σg =σc is chosen), therefore δσg = 0;
• if natural boundary conditions are used the condition n· ∇σg = 0 is
chosen.
4. Numerical integration
To solve the first and second step of the Ru-Aifantis theory described
above (i.e. Eqs. (10) and (14)) the Gauss quadrature rule has been adopted.
Since the first step of the Ru-Aifantis theory consists in the solution of
the second-order p.d.e. of classical elasticity (10), for the numerical
inte-gration of the stiffness matrix K, the usual number of integration points is
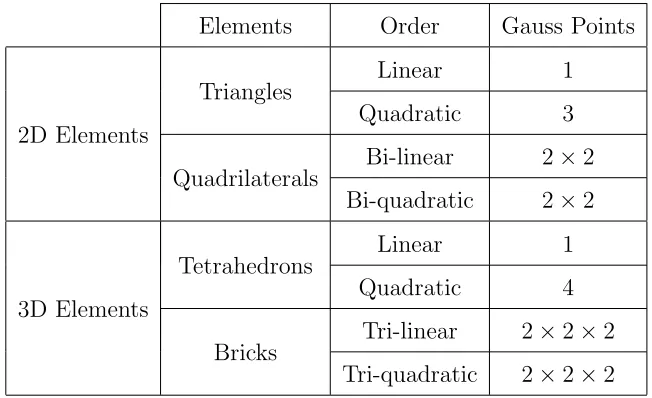
used for each kind of implemented elements, as summarised in Table 1. It
must be noted that for the bi-quadratic serendipity quadrilateral and the
[image:10.612.140.466.383.582.2]tri-quadratic serendipity brick elements, an under-integration is adopted.
Table 1. Number of Gauss points used in the first step of the Ru-Aifantis theory.
Elements Order Gauss Points
2D Elements
Triangles Linear 1
Quadratic 3
Quadrilaterals Bi-linear 2×2 Bi-quadratic 2×2
3D Elements
Tetrahedrons Linear 1
Quadratic 4
Bricks Tri-linear 2×2×2 Tri-quadratic 2×2×2
At this point, the most interesting aspect to investigate is the integration
rule to use in the second step of the Ru-Aifantis theory and, in particular,
most desirable solution would be, obviously, the possibility to use the same
integration rule used in the first step of the Ru-Aifantis theory.
However, the applicability of such a solution is not obvious and would
need to be demonstrated. In fact while for the first step of the Ru-Aifantis
theory the order of the stiffness matrix (which has to be integrated) is two
times the order of the derivative of the shape functions, in the second step
the order of the integrand part (of the term in the left side of Eq. (14)) is two
times the order of the shape functions themselves; this means that for exact
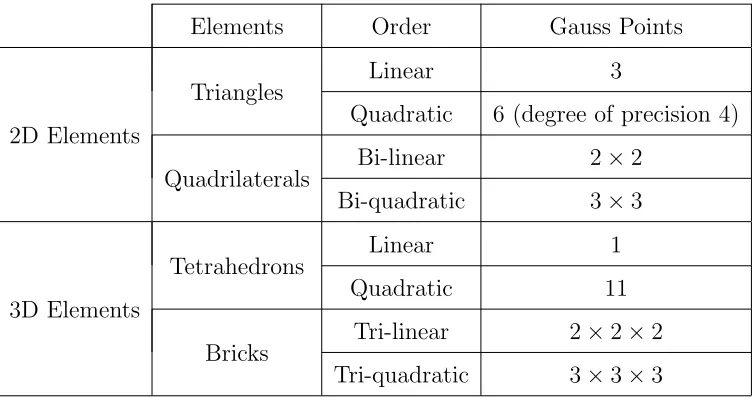
integration, higher order integration rules are needed as listed in Table 2.
Hence, in other terms, the problem is to prove if it is possible to
under-integrate (i.e. use integration rules with a lower order than that necessary
for the exact integration) the left part of Eq. (14) for both ℓ= 0 and ℓ 6= 0.
Unfortunately, this is not always possible, as described afterwards.
The investigation has been carried out through a study of the eigenvalues
of the matrix M+ℓ2D when ℓ 6= 0 and, obviously, of matrix M on its own
whenℓ = 0, whereM=R
ΩN T
σNσ dΩ is the first matrix term of the left
inte-gral in Eq. (14) similar to a mass matrix, whileD =R
Ω
∂NT σ
∂x ∂Nσ
∂x + ∂NT
σ
∂y ∂Nσ
∂y + ∂NT
σ
∂z ∂Nσ
∂z
dΩ
is the second matrix term similar to a diffusivity matrix. In particular, to
avoid rank deficiencies all the eigenvalues must be non-zero, which means
that zero energy modes are not admitted.
From the performed studies it turned out that, whenℓ= 0, it is possible
to use the same integration rule only for the linear quadrilateral, tetrahedron
and brick elements, while for the other five types of elements higher order
integration rules are needed (the minimum number of integration points is
to the contribution of the matrix D, it is possible to use the same integration
[image:12.612.116.493.220.419.2]rule, used in the first step, for every type of finite element.
Table 2. Number of Gauss points formally required in the second step of the Ru-Aifantis
theory.
Elements Order Gauss Points
2D Elements
Triangles Linear 3
Quadratic 6 (degree of precision 4)
Quadrilaterals Bi-linear 2×2 Bi-quadratic 3×3
3D Elements
Tetrahedrons Linear 1
Quadratic 11
Bricks Tri-linear 2×2×2 Tri-quadratic 3×3×3
4.1. Shear locking
As well known, in the case of bending-dominant problems, especially for
fully integrated linear elements, the numerical solution of the problem can
be affected by shear locking, leading to an unphysically stiffer behaviour
of the analysed component. To check the occurrence of this phenomenon,
the proposed methodology has been applied to model a classical bending
problem. The results of the aforementioned analysis have shown that the
numerical solution of the second step of the Ru-Aifantis theory (Eq. (14))
is not affected by locking effects, even in the case of fully integrated linear
elements, while the usual selective integration rules may be applied for the
5. Error estimation and convergence study
Now that the most suitable integration rules have been identified for each
kind of finite element, the attention can be focused on the error estimation
of the new methodology; in particular the convergence rate of the different
finite elements has been studied for some simple problems.
To determine the convergence rate, the L2-norm error defined as
kek2 =
kσe−σck
kσek
(15)
where σe and σc are, respectively, the exact and calculated values of the
stresses, has been plotted against the number of degrees of freedom (nDoF).
From the theory [27] it is well known that the error on displacements is
proportional to the nDoF as
eu ≃O(nDoF)− n+1
k = O(nDoF)p (16)
For what concerns the stresses, in the proposed methodology they are
calculated from Eq. (14) as primary variable, instead of secondary variable
as it happens in standard finite element methodologies, based on classical
elasticity. For this reason, the error on stresses is still proportional to the
nDoF, but with a different rate respect to classical elasticity. In particular,
for a Helmholtz equation like Eq. (14), the proportionality is given by [28]:
eσ ≃O(nDoF)− n+1
k = O(nDoF)p (17)
where n is the polynomial order and k = 2,3 for 2D and 3D problems,
respectively.
bi-logarithmic system of axes is a straight line, whose slope represents the
convergence rate p of the numerical solution to the exact solution. The
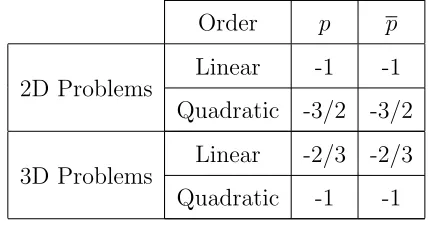
[image:14.612.195.409.242.355.2]theoretical convergence rates are summarised in Table 3.
Table 3. Theoretical convergence rates in the determination of the displacements (p) and
stresses (p).
Order p p
2D Problems Linear -1 -1 Quadratic -3/2 -3/2
3D Problems Linear -2/3 -2/3 Quadratic -1 -1
5.1. Internally pressurised hollow cylinder
To test the convergence rate of the bi-dimensional elements, the problem
of a cylinder subjected to an internal pressure pi shown in Fig. 1 has been
analysed. The geometrical and material parameters of the problem are b =
4 m, a= 1 m, E = 109 N/m2, ν = 0.25 and ℓ = 0.1 m. An internal pressure
pi = 107 N/m2 is applied.
[image:14.612.237.373.513.647.2]Due to the symmetry of the problem only a quarter of the vessel has been
modelled. The domain has been modelled with all four types of implemented
2D finite elements, starting from a coarse mesh of 8×8 elements and
per-forming then a mesh refinement by doubling the number of elements along
each side until a mesh of 256×256 elements is obtained. All the employed
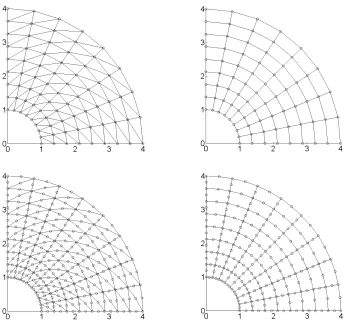
meshes are shown in Fig. 2.
The boundary conditions accompanying Eq. (10) are taken as
homoge-neous essential so that the circumferential displacements uθ are null along
the two axes of symmetry, while those associated to Eq. (14) are chosen as
Fig. 2. Cylinder subject to an internal pressure: employed meshes for linear (top-left)
and quadratic (bottom-left) triangular elements, bi-linear (top-right) and bi-quadratic
(bottom-right) quadrilateral elements.
To define the error, the numerical solutions obtained using the new
method-ology have been compared with the exact solution approximated using
Fig. 3. Cylinder subject to an internal pressure: displacements error (left) and stresses
er-ror (right) versus number of Degrees of Freedom. The slope of the straight lines represents
the convergence rate of the numerical solution to the exact solution.
In Fig. 3 the convergence behaviour of all the implemented bi-dimensional
elements is shown, for both displacements and stresses. It can be seen that
the numerically obtained convergence rates are in good agreement with the
theoretical predictions given in Table 3.
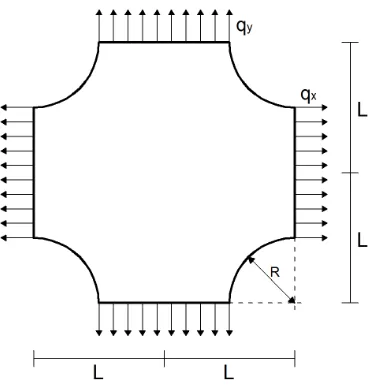
5.2. Cross-shape specimen
The second problem is the case of a cross-shape specimen subjected to
a uniform tensile state at the end of the arms as shown in Fig. 4. The
geometrical and material parameters of the problem are R = 1 m, L = 2 m,
E = 109 N/m2,ν = 0.25 andℓ= 0.1 m. Distributed loads q
x= qy = 1000 N/m
Fig. 4. Cross-shape specimen: geometry and loading conditions.
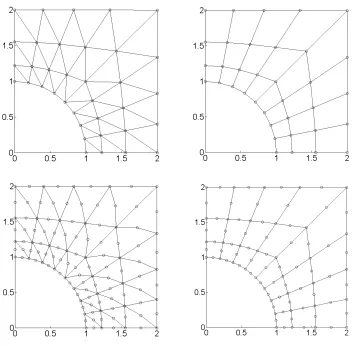
Also in this case, for symmetry reasons, only a quarter of the specimen has
been modelled using all the different types of finite elements implemented,
starting also in this case with a coarse mesh as shown in Fig. 5. Afterwords,
a mesh refinement has been performed, running four other meshes obtained
doubling the number of elements, in both radial and circumferential
direc-tions, of the previous one.
The boundary conditions accompanying Eq. (10) are taken as
homoge-neous essential so that the displacements in x-directionux and in y-direction uy are null along the vertical and horizontal axes of symmetry, respectively.
For what concerns Eq. (14), instead, the boundary conditions are chosen as
Fig. 5. Cross-shape specimen: employed meshes for linear (top-left) and quadratic
(bottom-left) triangular elements, bi-linear (top-right) and bi-quadratic (bottom-right)
quadrilateral elements.
To define the error, the numerical solutions obtained using the new
method-ology have been compared with the exact solution obtained applying the
Fig. 6. Cross-shape specimen: displacements error (left) and stresses error (right) versus
number of Degrees of Freedom. The slope of the straight lines represents the convergence
rate of the numerical solution to the exact solution.
Fig. 6 shows the convergence behaviour of all the implemented bi-dimensional
elements in the determination of both displacements and stresses; again, this
is in line with the theoretical predictions.
5.3. Internally pressurised hollow sphere
For what concerns the convergence rate of the three-dimensional elements,
the problem of a sphere subjected to an internal pressure pi shown in Fig. 7
has been studied. The geometrical and material parameters of the problem
are b = 1 m,a= 0.5 m, E = 109 N/m2,ν = 0.25 and ℓ= 0.1 m. An internal
pressure pi = 107 N/m2 is applied.
Due to the symmetry of the problem only an eighth of the sphere has been
modelled. The domain has been modelled with all four types of implemented
3D finite elements, starting from a coarse mesh, as shown in Fig. 7 for the
tri-linear brick elements, and performing then a uniform mesh refinement.
The boundary conditions related to Eq. (10) are taken ashomogeneous
of symmetry, while for what concerns Eq. (14) they are chosen as
[image:21.612.131.447.178.311.2]homoge-neous natural throughout, like in the previous two examples.
Fig. 7. Hollow sphere subject to an internal pressure: geometry and loading conditions
(left), initial mesh (right).
To define the error, the numerical solutions obtained using the new
method-ology have again been compared with the exact solution obtained applying
[image:21.612.122.497.451.576.2]the Richardson extrapolation.
Fig. 8. Hollow sphere subject to an internal pressure: displacements error (left) and
stresses error (right) versus number of Degrees of Freedom. The slope of the straight lines
represents the convergence rate of the numerical solution to the exact solution.
elements in the determination of both displacements and stresses. It can be
observed that, overall, the numerical solutions converge to the relative exact
solutions as theoretically expected, except for the quadratic tetrahedrons and
the tri-quadratic bricks, which appear to be slightly, but not much, slower
than theoretically predicted, in the determination of the displacements.
6. Convergence in presence of singularities and recommendations
on optimum element size
As mentioned in Section 1, one of the features of gradient elasticity is
the ability to remove singularities from the stress and strain fields as those
emerging in correspondence of crack tips. Problems characterised by the
presence of cracks represent the most demanding case from the convergence
point of view and, as a consequence of this, also in terms of element size in
the vicinity of the crack tip. Hence, the study of the convergence behaviour
of the implemented gradient-enriched finite elements in presence of cracks is
of prime importance.
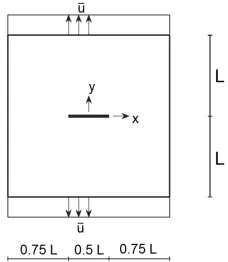
To fulfil this interest, the mode I fracture problem shown in Fig. 9 and
presented in [1] has been analysed, using all the four implemented
two-dimensional elements. The geometrical and material parameters of the
prob-lem are L= 1 mm,E = 1000 N/mm2, ν = 0.25 and ℓ= 0.1 mm. Prescribed
displacementsu= 0.01 mm are applied at the top and bottom edges. Due to
the symmetry only the top-right quarter has been modelled, with 4×4, 8×8,
16×16, 32×32 and 64×64 bi-linear and bi-quadratic quadrilateral elements
and with the double of linear and quadratic triangular elements (where the
two triangles).
Fig. 9. Mode I fracture problem: geometry and boundary conditions. The crack is
represented by the solid line.
Two different options are considered for the boundary conditions
accom-panying Eq. (13):
• Option 1: essential, that is the non-local stress components are
pre-scribed so that σg = σc on free boundaries. In the present example:
σg
xx = 0 on the vertical edges, σgyy = 0 on the face of the crack and
σg
xy = 0 everywhere.
• Option 2: homogeneous natural throughout, that is n· ∇σg = 0.
To determine the convergence rate, the L2-norm error defined in Section 5
has been plotted against the nDoF, as shown in Fig. 10.
From the theory [27] it is well known that, in problems with singularities,
the error on classical stresses is proportional to the nDoF as
eσ ≃O(nDoF)−[min(λ,n)]/2 = O(nDoF)p˜ (18)
where λ= 0.5 for a nearly closed crack.
system of axes is still a straight line, whose slope represents the convergence
rate ˜p of the numerical solution to the exact solution, which in this case is
˜
p= 0.25 for both linear and quadratic elements.
To define the error, the numerical solutions obtained using the new
method-ology have been compared with the exact solution approximated using
Richard-son extrapolation.
Fig. 10 shows that, in presence of singularities, both linear and quadratic
elements are characterised by approximatively the same convergence rate
(in accordance with Eq. (18)), but higher than the correspondent theoretical
value defined in Eq. (18), for what concerns the determination of the stresses.
This higher convergence rate is due to two main causes:
• removal of singularities from the numerical solution;
• gradient-enriched stresses calculated as primary variables, instead of
secondary variables (as for classical stresses).
Furthermore, it can be observed that, while the application of the second
option of the boundary conditions leads to a uniform convergence rate equal
to about 0.8, adopting the first option all the elements are characterised by
an initial convergence rate of about 0.3, reaching the same convergence rate
Fig. 10. Mode I fracture problem: stresses error versus number of Degrees of Freedom
for the first (left) and the second (right) option of boundary conditions. The slope of
the straight lines represents the convergence rate of the numerical solution to the exact
solution.
Since, as mentioned before, the case of a sharp crack represents the most
demanding problem in terms of convergence, it is now possible to provide
recommendations on optimal element size. In particular, in Table 4 the ratio
between the element size and the length scale ℓ, necessary to guarantee an
error of about 5% or lower, is summarised for the different elements.
The recommendations provided in Table 4 have a very important
mean-ing from the commercial point of view, because they show that, applymean-ing
the proposed methodology, a relatively coarse mesh is enough to obtain a
solution affected by an acceptable error, with evident benefits in terms of
Table 4. Recommended optimal element size, to guarantee an error of 5% or lower.
Boundary Conditions Elements Order Element size/ℓ
Option 1
(essential b.c.)
Triangles Linear 1/3
Quadratic 1/4
Quadrilaterals Bi-linear 1/3 Bi-quadratic 1/3
Option 2
(natural b.c.)
Triangles Linear 1
Quadratic 5/2
Quadrilaterals Bi-linear 3/2 Bi-quadratic 5/2
7. Applications
Once the new methodology was fully implemented, it has been applied
to a two- and three-dimensional problem, in order to show the ability of the
methodology in removing singularities.
7.1. Mode I fracture
The mode I fracture problem described in Section 6 has been analysed,
using all the four implemented two-dimensional elements, in order to check
the quality of the results.
In Fig. 11 σxx and σyy profiles along the x-axis, obtained applying both
the options on the boundary conditions, are plotted and compared; it can
be seen that the application of the different boundary conditions produces
Fig. 11. Mode I fracture problem: comparison of theσxx(left) andσyy (right) values for
y = 0, obtained employing the different kind of finite elements and both the options for
[image:27.612.125.486.363.481.2]the boundary conditions.
Fig. 12. Mode I fracture problem: surface plots of stress component σxx with
homo-geneous essential boundary conditions. Comparison between the results obtained in [1]
using bi-linear quadrilateral elements (left) and those obtained employing the implemented
linear triangular elements (right).
The stress fields obtained using the 32×32 mesh, with all the four types
of elements, have been compared with the stress fields presented in [1] using
32×32 bi-linear quadrilateral elements and, as shown in Fig. 12, the
(in Fig. 12 only the σxx field, obtained using the linear triangular elements
and the second option for the boundary conditions, is compared with the
corresponding one presented in [1]).
But the most significant aspect is that, introducing a gradient
enrich-ment, the singularities in the stress field are removed; in fact, as shown in
Fig. 13, applying classical elasticity the solution does not converge to a finite
value upon mesh refinement and an unbounded peak is detected in
corre-spondence of the crack tip, while introducing a gradient enrichment in the
governing equations, refining the mesh the solution is not anymore singular
[image:28.612.114.496.357.496.2]and converges towards a unique finite value.
Fig. 13. Mode I fracture problem: σyy profiles along x-axis obtained by applying
clas-sical elasticity (left) and gradient elasticity (right) and the first option on the boundary
conditions, upon mesh refinement.
7.2. Beams-column joint
In order to show the ability of the proposed methodology to remove the
singularities also in three-dimensional problems, the problem shown in Fig. 14
are L = 2.4 m, a = 0.4 m, E = 1000 N/mm2, ν = 0.25 and ℓ = 0.03 m.
Prescribed surface distributed loads q = 105 N/m2 are applied at the free
end of the two beams, while the column is fully restrained at its base. The
boundary conditions associated to Eq. (14) are chosen as homogeneous nat-ural throughout, that is n· ∇σg = 0. The domain has been modelled using
[image:29.612.136.474.270.392.2]128 (Fig. 14), 1024, 8192 and 65536 linear brick elements.
Fig. 14. Beams-column joint: geometry and loading conditions (left), starting mesh
(right).
In Fig. 15 the normal stress σxx and the shear stress σxy obtained by
applying both classical elasticity (ℓ = 0.00m) and gradient elasticity (ℓ =
0.03m) are plotted along a vertical edge of the column (x = 0.4, y = 0.4,
0.0 ≤ z ≤ 2.4), while in Fig. 16 the normal stress σxx is plotted along the
Fig. 15. Beams-column joint: profiles ofσxx (top row) and σxy (bottom row), along a
column vertical edge (x= 0.4,y= 0.4, 0.0≤z≤2.4), for both classical (left column) and
gradient (right column) elasticity, over mesh refinement.
Fig. 16. Beams-column joint: profiles of σxx, along the beam in y-direction (x= 0.2,
0.0 ≤ y ≤ 2.4, z = 2.0), for both classical (left column) and gradient (right column)
[image:30.612.129.473.476.600.2]Both figures clearly show the ability of the proposed methodology to
re-move singularities from the stress fields; in fact while the use of classical
elasticity leads to singular solutions in correspondence of the stress
concen-trators, if a gradient enrichment is introduced in the governing equations of
the problem, the solutions are not singular anymore, converging to a unique
finite solution. Hence the ability of the proposed methodology to remove the
singularities is confirmed also for three dimensional problems.
8. Conclusions
In this paper a unified FE methodology based on gradient-elasticity, for
both two- and three-dimensional finite elements, has been presented,
includ-ing Gauss integration rules and error estimation.
The proposed methodology has been applied to both two- and
three-dimensional simple problems without singularities and it has been found
that, overall, the numerically obtained convergence rates are well in line
with theoretical predictions.
The convergence rate of the proposed methodology has been also
anal-ysed in presence of singularities, showing that both linear and quadratic
elements are characterised by a convergence rate higher than the
theoreti-cal value typitheoreti-cal of finite element methodologies based on classitheoreti-cal elasticity.
This is mainly due to the ability of gradient elasticity to remove singularities
from the numerical solution and to the fact that, in the proposed
method-ology, the gradient-enriched stresses are determined as primary variables,
instead of secondary variables as for classical elasticity-based finite element
been provided, highlighting the ability of the proposed methodology to
pro-duce solutions affected by acceptable errors using relatively coarse meshes,
with consequent advantages in terms of computational cost.
Furthermore, the proposed methodology has been applied to a couple of
problems that classical elasticity fails to describe accurately, in particular
to a two-dimensional mode I fracture problem, through which it has been
shown that the different implemented finite elements produce comparable
results (as expected) and that the application of different boundary
condi-tions leads to limited and acceptable differences in the final solution; and
to a three-dimensional problem characterised by stress concentrators. These
two examples highlight the ability of the proposed methodology to remove
the singularities from the stress fields, for both two- and three-dimensional
problems.
Acknowledgements
The authors gratefully acknowledge financial support from Safe
Technol-ogy Ltd.
References
[1] H. Askes and E. C. Aifantis. Gradient elasticity in statics and
dy-namics: An overview of formulations, length scale identification
pro-cedures, finite element implementations and new results. Interna-tional Journal of Solids and Structures, 48(13):1962–1990, 2011. doi:
[2] H. Askes, I. Morata, and E. C. Aifantis. Finite element analysis with
staggered gradient elasticity. Computers & Structures, 86:1266–1279, 2008. doi: 10.1016/j.compstruc.2007.11.002.
[3] H. Askes, J. Pamin, and R. de Borst. Dispersion analysis and
element-free Galerkin solutions of second- and fourth-order gradient-enhanced
damage models. International Journal for Numerical Methods in
Engi-neering, 49:811–832, 2000.
[4] H. Askes and E. C. Aifantis. Numerical modelling of size effects with
gradient elasticity - formulation, meshless discretization and examples.
International Journal of Fracture, 117:347–358, 2002.
[5] H. Askes and L. J. Sluys. Explicit and implicit gradient series in
dam-age mechanics. European Journal of Mechanics - A/Solids, 21:379–390,
2002.
[6] H. Askes, A.S.J. Suiker, and L. J. Sluys. A classification of higher-order
strain-gradient models - linear analysis. Archive of Applied Mechanics,
72:171–188, 2002.
[7] H. Askes and L. J. Sluys. A classification of higher-order strain-gradient
models in damage mechanics. Archive of Applied Mechanics, 73:448–465, 2003.
[8] J. Pamin, H. Askes, and R. de Borst. Two gradient plasticity theories
discretized with the element-free Galerkin method. Computer Meth-ods in Applied Mechanics and Engineering, 192:2377–2403, 2003. doi:
[9] Z. Tang, S. Shen, and S.N. Atluri. Analysis of materials with
strain-gradient effects: a meshless local Petrov-Galerkin (MLPG) approach,
with nodal displacements only. Computer Modeling in Engineering &
Sciences, 4:177–196, 2003.
[10] I. Tsagrakis and E. C. Aifantis. Element-free Galerkin implementation
of gradient plasticity. Part I: formulation and application to 1D strain
localization. Journal of the Mechanical Behavior of Materials, 14:199–
231, 2003.
[11] I. Tsagrakis and E. C. Aifantis. Element-free Galerkin implementation
of gradient plasticity. Part II: applications to 2D strain localization and
size effects. Journal of the Mechanical Behavior of Materials, 14:233–
253, 2003.
[12] J. Pamin. Gradient-dependent plasticity in numerical simulation of
local-ization phenomena. Dissertation, Delft University of Technology, 1994.
[13] A. Zervos. Finite elements for elasticity with microstructure and
gra-dient elasticity. International Journal for Numerical Methods in Engi-neering, 73(4):564–595, 2008. doi: 10.1002/nme.2093.
[14] A. Zervos, S. Papanicolopulos, and I. Vardoulakis. Two finite-element
discretizations for gradient elasticity. Journal of Engineering Me-chanics ASCE, 135(3):203–213, 2009. doi:
10.1061/(ASCE)0733-9399(2009)135:3(203).
Inter-national Journal for Numerical Methods in Engineering, 37:3489–3519,
1994.
[16] A. Zervos, P. Papanastasiou, and I. Vardoulakis. A finite elements
dis-placement formulation for gradient elastoplasticity. International Jour-nal for Numerical Methods in Engineering, 50:1369–1388, 2001.
[17] A. Zervos, P. Papanastasiou, and I. Vardoulakis. Modelling of
local-isation and scale effect in thick-walled cylinders with gradient
elasto-plasticity. International Journal of Solids and Structures, 38:5081–5095, 2001.
[18] S. A. Papanicolopulos, A. Zervos, and I. Vardoulakis. A
three-dimensionalC1 finite element for gradient elasticity.International
Jour-nal for Numerical Methods in Engineering, 77:1396–1415, 2009. doi: 10.1002/nme.2449.
[19] F. Cirak, M. Ortiz, and P. Schr¨oder. Subdivision surface: a new
paradigm for thin-shell finite-element analysis. International Journal
for Numerical Methods in Engineering, 47:2039–2072, 2000.
[20] C. Q. Ru and E. C. Aifantis. A simple approach to solve boundary-value
problems in gradient elasticity. Acta Mechanica, 101:59–68, 1993. doi:
10.1007/BF01175597.
[21] L. Tenek and E. C. Aifantis. A two-dimensional finite element
[22] E. C. Aifantis. On the role of gradients in the localization of deformation
and fracture.International Journal of Engineering Science, 30(10):1279– 1299, 1992. doi: 10.1016/0020-7225(92)90141-3.
[23] S.B. Altan and E. C. Aifantis. On the structure of the mode III
crack-tip in gradient elasticity. Scripta Metallurgica et Materialia, 26:319–324,
1992.
[24] M. Gutkin and E. C. Aifantis. Edge dislocation in gradient elasticity.
Scripta Materialia, 36:129–135, 1997.
[25] M. Gutkin and E. C. Aifantis. Dislocations in the theory of gradient
elasticity. Scripta Materialia, 40:559–566, 1999.
[26] M. Gutkin. Nanoscopics of dislocations and disclinations in gradient
elasticity. Reviews on Advanced Materials Science, 1:27–60, 2000.
[27] O.C. Zienkiewicz and R.L. Taylor. The Finite Element Method, volume 1 – The Basis. Butterworth-Heinemann, 5th edition, 2000. ISBN 0 7506
5049 4.
[28] F. Ihlenburg and I. Babuˇska. Finite Element Solution of the Helmholtz
Equation with High Wave Number Part I: The h-Version of the FEM.
Computers & Mathematics with Applications, 30(9):9–37, 1995.
[29] L. F. Richardson. The approximate arithmetical solution by finite
dif-ferences of physical problems involving differential equations, with an
En-gineering Sciences, 210(459-470):307–357, 1911. ISSN 0264-3952. doi: