Theses
Thesis/Dissertation Collections
4-1-1987
A finite element solution of thermal wave
propagation in elastic media
Dominic N. Dalo
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
ritscholarworks@rit.edu
.
Recommended Citation
by
Dominic N. Dalo
A Tbesis Submitted
in
Partial Fulfillment
of the
Requirements
for the Degree of
MASTER OF SCIENCE
in
Mechanical
Engineering
(Thesis Advisor)
Prof.
----.".,.=,...-==,----
_
Approved by:
Prof.
_
Prof.
_
<Department Head)
Prof.
---"====,..,,,=;,-
_
DEPARTMENT OF MECHANICAL ENGINEERING
COLLEGE OF ENGINEERING
ROCHESTER INSTITUTE OF TECHNOLOGY
ROCHESTER, NEW YORK
I Dominic N.
Palo
hereby
grantpermissionto the
Wallace
Memorial
Library,
ofR.I.T.,
to
reproducemy thesis in
wholeorin
part.Any
reproduction will notbe
for
commercialuseor profit.3 April 1987
To
my
Mother
andFather,
whohave
providedthe
support and encouragementto
allow meto
achieve, I
dedicate
this
work.To Dr.
Hany Ghoneim,
my thesis
advisor,
I
wishto
expressmy
deepest
gratitude andbestow
the
accolade ofbeing
the
professor whohas
moststimulated
my
desire
to
learn.
To
Drs.
William
F. Halbleib
andRobert A.
Ellson,
whotaught
methe
fundamentals
ofmechanics andthermodynamics,
my thanks
andadmiration.To Drs.
Charles
W. Haines
andBhalchandra V.
Karlekar,
my
appreciationfor
providing
mewithinvaluable
guidanceduring
my
college career.And
finally
to
the
membersofmy thesis
defense
committee,
I
am much obligedfor
the time
they
spentreading
andevaluating my
work.The
rationaltheory
ofthermodynamics
is
usedto
develop
equationsgoverning the
propagation ofthermal
waves.A
new vectorquantity
is
introduced
to
accountfor
the
thermal
waves.The
phenomenon ofthermal
wavepropagation
is
illustrated
by
considering the
problem of one-dimensionalheat
conduction
in
afinite
slab subjectedto
aheat flux
pulse.The
solutionis
obtained via
the
finite
element method.A
discussion
ofthe
results andtheir
significance
is
also presented.List
ofFigures
viNomenclature
vii1.0
INTRODUCTION
1
1.1
Historical Review
1
1.2
Literature Review
1
1.3
Approach
Taken
3
1.4
Notation
3
2.0
THEORY
5
2.1
List
ofFundamental
Quantities
5
2.2
Fundamental Equations
ofContinuum Mechanics
6
2.3
Constitutive
Relations
7
2.4
Derivation
ofEquations
8
3.0
PROBLEM DESCRIPTION
13
3.1
Definition
ofProblem
13
3.2
Dimensional
Analysis
15
4.0
FINITE ELEMENT IMPLEMENTATION
17
4.1
Function
Approximation
17
4.2
Weighted Residual
19
4.3
Temporal Approximation
22
5.0
RESULTS
AND DISCUSSION
25
5.1
Temperature
Response
25
5.2
Thermal
Flux
27
5.3
Thermal
Waves
27
5.4
Finite
Element
Program
36
6.0
CONCLUSIONS
39
References
41
Appendices
A.
Formation
ofFinite Element Matrices
43
Figure
Caption
Page
1
Geometry
andThermal
Conditions
14
2
Shape Functions
for
Linear
Elements
18
3
Thermal Response for Various Values
ofAlpha
26
4
Heat Flux Profiles for
a =10.0,
x =0.15
28
5
Heat
Flux
Profiles for
a =100.0,
x =0.05
29
6
Heat Flux
Profiles
for
a =1000.0,
x =0.025
30
7
Temperature Profiles for
a =10.0
31
8
Temperature Profiles for
a =100.0
32
9
Temperature Profiles for
a =1000.0
33
10
Temperature Profiles for
a =1000.0
after reflection of
thermal
wave35
A
materialconstant associatedwithelasticheat flux
a
dimensionless
material parameterb
dimensionless
elasticheat
flux
Cv
specificheat
at constant volumee specific
internal
energy
6
weighting
parameterk
thermal
diffusivity
k
thermal
conductivity
h
length
offinite
elementp
massdensity
r
internal
heat
supply
perunit masss specific
entropy
x
dimensionless
time
t
time
T
temperature
u
dimensionless
temperature
ti/
Helmholtz
free
energy
co
frequency
ofheat
pulseX
dimensionless
positionx position
Qo
amplitudeofheat
pulseFirst Order Tensors
Pi
elasticheat
flux
bi
dimensionless
elasticheat
flux
fi
body
force
perunit massgi
constitutive relation associatedwithelasticheat flux
qi
total
heat
flux
perunit area4>i
shapefunction
associatedwithb
Bi
nodalvaluesofdimensionless
elasticheat flux
U,
nodalvaluesofdimensionless
temperature
Higher
Order Tensors
Yij
coefficient ofthermal
expansiontensor
eij
total
straintensor
eejj
elastic straintensor
oij
total
stresstensor
kjj
thermal conductivity
tensorDijkl
elastic modulustensor
1.1
HISTORICAL
BACKGROUND
The
conduction ofheat
in
materialshas
long
been
established as adiffusion
processthat
is
directly
proportionalto the
temperature
gradient andamaterial
property
defined
asthe
thermal
conductivity.A
seriesofexperiments,
the
first
of which wasconductedin
the
mid-1940'shave indicated
that thermal
disturbances
can propagate as waves.Peshkov
[1],
the
earliest ofthe
investigators
to
observethese
thermal waves,
introduced
the term
"second
sound"
to
describe
the
waves'analogous
behavior
to
ordinary
sound waves.Peshkov's
experimentswere conductedusing
liquid helium
atatemperature
ofapproximately 2
K.
Nearly
twenty
yearslater,
Ackerman
andhis
associates[2]
were ableto
repeatPeshov's
findings
using
solidhelium
crystals,
again at cryogenictemperatures.
Similar
experimentshave
been
conductedusing
halogen
alkalicrystalswith nodefinitive
results.Hence,
to
date,
second soundeffects
have
only been
observedin
non-metallic materials and undervery
special conditions.1.2
LITERATURE
REVIEW
Due
to
the
nature ofthe
materials and conditionsin
whichthe
secondsoundwaves
have
been
observed,
modern physicistsbelieve
that
thermal
wavepropagation
is
a microscopic phenomenonthat
falls
into
the
realm ofquantummechanics.
Bertman
andSandiford
[3]
give anon-mathematical,
but
otherwisematerials,
such asliquid
and solidhelium
whichhave had
allimpurities
"frozen
out"of
them,
arethought to
promotethe
propagation ofthese
phonons.Impure
or "dirty"materials,
whichincludes
allmetals,
contain somany
imperfections
that the
phonons are scatteredin
a randomfashion
resulting in
classical
heat diffusion.
In
keeping
with quantumtheory,
second sound effectsare proposed
to
occuronly
atdiscrete
energy
levels
i.e.,
only
phononsofspecificfrequencies
canpropagate as a wave.There
arethose
of anotherschool,
mainly
classicalphysicists,
mathematicians and
engineers,
whobelieve
that
thermal
wave propagation canbe
explainedusing
a continuum approach.Lord
andShulman
[4]
wereamong the
earliest researchersknown
to
present a generalizedtheory
ofthermoelasticity
which accountedfor
the
propagation ofthermal
waves.Their
approach
is based
uponmodifying the
classicalFourier
law
ofheat
conductionto
include
an additionalterm
whichinvolves
the
rateofchange ofthe
heat
flux.
This
modificationgenerally
resultsin
ahyperbolic
heat
conduction equation asopposed
to
the
standard parabolicform.
Ozisik
andVick
[5]
present a closedform
solutionto
an uncoupled one-dimensionalhyperbolic heat
conductionequation.
Their
resultsindicate
that
this
type
of modificationto
the
law
ofheat
conductiondoes
resultin
asolutionthat
exhibitsoscillatory
behavior.
Researchers have
soughtto
develop
theories
which validatethe
modificationof
the
Fourier's law in
this
manner.Others have
taken
different
approachesto
the
development
ofthe
equationsgoverning the
propagation ofthermal
waves.Bogy
andNaghdi
[6]
showhow
equationsmay
be
obtainedby
statementof
the
secondlaw
ofthermodynamics
asthe
basis
oftheir
theory.
A
vector
field
is
introduced
to
representthe
flow
of a microscopic excitationthought
to
originatethe
thermal
wavesin
the
work ofAtkin
andhis
associates[9]. While
someofpreceding
workshave
obtainedpossiblefield
equations,
nonehave
presentedany
quantitative resultsfor
comparative purposes.1.3
APPROACH TAKEN
In this
work,
the
rationaltheory
ofthermodynamics
was employedto
develop
coupledthermoelastic
field
equations which accountfor
the
thermal
waves.
An
additional constitutive relation wasintroduced
to
define
a new vectorquantity
associated withthe
second sound waves.The
ensuing
partialdifferential
equationsalong
withthe
fundamental
equations of continuummechanics are sufficient
to
completely
define
the
state ofthe
body.
The
propagation of
thermal
wavesis demonstrated
by
solving
an example ofone-dimensional
heat
conductionin
afinite
slab.Due
to
the
presence ofnonlinearities
in
the governing
equations,
the
solution was obtained viathe
finite
element method.A
computer codeto
implement
the
finite
elementalgorithmwas
developed
andkey
resultsare presented.1.4
NOTATION
Prior to
deriving
the governing
equations,
the
notationto
be
usedthroughout the
remainder ofthe
work willbe
defined.
Since
a continuumapproach
is
being
used,
Cartesian
tensors
are usedto
describe
variousquantities.
Among
the
methods ofdesignating
tensorial
quantities, the
index
by
aRoman
orGreek
letter
with alower
caseRoman
subscript.An
example ofa
first
ordertensor
is
position, xj,
wherethe
subscript "i"is
understoodto take
on
the
values(1,2,3)
in
that
order.A
second ordertensor
is denoted
by
avariable with
two
distinct
subscriptse.g.,
the
stresstensor,
oij.Third,
fourth
and
higher
ordertensors
are representedby
three,
four
or moredistinct
subscripts.
Note
that
if
a subscriptis
repeated,
the
rank or order ofthe
tensor
decreases
by
two
i.e.,
an
andAjjjk
are zero and second ordertensors
respectively.
In
orderfor
tensors
to
be
added andsubtracted,
they
mustbe
ofthe
sameorder.
The
resultanttensor
is
ofthe
same order asthe
originaltensors.
Multiplication
canbe
performedbetween
tensors
ofany
order.The
rank ofthe
product
is
the
sum ofany nonrepeating
subscriptse.g., the
productsoijCij
andDijkieij
areofranks zero andtwo,
respectively.Division
by
atensor
of orderoneorgreater
is
undefined.Partial
differentiation
with respectto
time
willbe denoted
by
asuperimposed
dot
().
Partial
differentiation
with respectto
postion willbe
denoted
by
indices.
Indices
usedto
representthe
rank ofthe tensor
before
differentiation
andthe
order ofdifferentiation
are separatedby
a comma.Subscripts
afterthe
variablebut before
the
commasignify the
rankbefore
differentiation
and subscripts afterthe
commadenote
the
order ofthe
differentiation.
The
rank ofatensor
often changes upondifferentiation.
The
rank
is
againgivenby
the
sum ofthe nonrepeating subscripts,
but
nowincludes
the
subscriptsafterthe
commaas well.Examples
ofthis
areT,i
andojij
whichThe
development
ofthe thermoelastic
equations proposedto
governthe
propagation of
thermal
wavesis based
onthe
rationaltheory
ofthermodynamics
first
introduced
by
Coleman
andNoll
[10].
The
theory
requires
three
basic
postulates[11]:
1.
A list
ofthe
fundamental
thermomechanical
quantities neededfor
acomplete
description
ofthe thermodynamic
processin
acontinuum2.
The basic
equations of continuum mechanicsi.e.,
balance
oflinear
momentum,
conservation ofenergy,
andthe
secondlaw
ofthermodynamics
expressedin terms
ofthe
quantitiesin
(1)
3.
Constitutive
assumptions which expresssome ofthe
quantitiesin
(1)
withothers
in the
list.
2.1
LIST
OF
FUNDAMENTAL
QUANTITIES
In compiling
alist
ofquantities,
whichcompletely
describes
a physicalphenomenon
in
acontinuum,
assumptions mustbe
made asto
what mustbe
included
and what canbe
neglected.The
scope ofthe
theory
willbe
usedto
narrow
down the
selection ofthe
quantities neededin the
analysis.Keeping
in
mind
that the
proposedtheory
is
to
embrace mechanical andthermal
behavior
ofacontinuum,
the
following
quantities are proposed.For
alltemporal
field
above,
a vector whichis
associated withthe
thermal
wavesis
alsointroduced.
This
vector willbe further
quantifiedlater in the
analysis.To
recapitulate,
the
list
ofthermomechanical
quantitiesalong
withtheir
respectivesymbolsis
Displacement
vectorElastic
straintensor
eey
Stress
Tensor
ij
Body
force
vectorfi
Absolute
temperature
T
Specific
Entropy
sSpecific
internal
energy
eInternal
heat
supply
rHeat flux
vectorqi
"Thermal"
vector
fr
whichareall
functions
of reference position vectorXi
andtime,
t.
2.2
FUNDAMENTAL
EQUATIONS OF
CONTINUUM MECHANICS
The
derivation
ofthe
governing
equationsis based
uponthe
fundamental
equationsof continuummechanics.
The balance
oflinear
mementumis
o.. . +p(f.
-x.) = 0
(2.1)
where
p
is
the
massdensity
ofthe
continuumin
the in the
reference state.The
conservationof
energy (or
first
law
ofthermodynamics) is
pe =o.x.. q.. +pr.
inequality
[12]
ps
1-,. >0. T \ T
/
'By
introducing
the Helmholtz
free
energy,
defined
as[13]
v = e
-Ts
(2.4)
the
specificinternal
energy, e,
canbe
replacedin the
list
offundamental
quantities
by
the
free
energy,
ip.Substituting
(2.4)
into
(2.2),
the
first law
ofthermodynamics
canbe
writtenasp(m +
Ts
+Ts)
=ax.. - q. . +pr. r rIJ IJ M,l r
(2.5)
By
substituting
for
prfrom
(2.5)
into
(2.3)
the
secondlaw
ofthermodynamics
becomes
T,i to a\
-p(uj + sT)+ o.e. - q. >0. ^> 1} IJ 1 rp
Equations
(2.5)
and(2.6)
arethe
fundamental
equations which willbe
usedin
the
derivation.
2.3
CONSTITUTIVE RELATIONS
Of the
list
offundamental
quantitiesdefined,
it is
consideredthat the
absolute
temperature,
the temperature gradient, the
straintensor,
andthe
internal
state variableintroduced
to
accountfor
the
thermal
wave mustbe
known
to completely
determine
the
state ofthe
body.
Hence,
the
remaining
following
constitutiverelations areproposedV =yW,T,.,.,V.)
s= s(T,T,.>ee>P\) v ij 1
q. = q.(T,T,.,ee,p\)
o.. = o..(T)T).)ee,p.)
ij ij V ij i
(2.7)
(2.8)
(2.9)
(2.10)
p.
=g.(T,TIi,4pi).(2"11)
i i i ij *
i
The
modificationofstandardthermoelasticity
is
accomplishedthrough
(2.11).
At
this
pointit is
necessary
to
further define
the
natureofthe total
straintensor,
ey.The
total
strain canbe
separatedinto
two
partsi.e.,
straindue
to
mechanical
loading
and straindue
to thermal
deformation. The
mechanical orelastic strain will
be denoted
by
eejj
andthe
thermal
strainby
Yij(TTr)
whereYij
is
the
coefficient ofthermal
expansiontensor
andTr
is
the
referencetemperature
in
the
state where no strainis
present.The
total
straintensor
is
therefore
givenby
e..= ee.+ y-(T
-T
).
(2.12)
ij ij Mj r
2.4
DERIVATION
OF
EQUATIONS
From the
rationaltheory
ofthermodynamics,
the
secondlaw
willbe
combined with
the
constitutiverelationsto
seeif any
restrictionscanbe
placedon
the
dependent
variables.Substituting
the time
derivative
ofthe
free
energy,
ij ij ijMj r ijMj ^1 f
Rearranging
terms,
equation(2.13)
canbe
rewrittenasVar
p <iMp*r,.
,n^e
p /%
(2l4)
dip
T,
-p-g.+o..y..(T - T )
-q. >0. ap\ ' >J
Vi
<m t
Since
T, T,j
andeye areunconstrained, the
coefficients ofthese
variables mustvanish
in
orderfor
the
aboveinequality
to
be
satisfied.This
yieldsthe
following
relationshipsSr, _ -^
+
I
0..V.- = SfT.e!.)(2.15)
oT p 'JMl 'J
^
=o(T,ee)
(2.16)
a..=
p =o
(T,ee)
1J aee 1J ,J
'"
0 .. q, = v(T,e?.,p.).
(2.17)
ST,. 'J '
Note
that the
quantitiess,
oy
and jjj areindependent
ofthe
temperature
gradient.
Substituting
the Helmholtz
free
energy
into
the
conservation of/
dUJdip
.e
8UJ-p T +
ee
+
p.
+Ts
+Ts
\5T rv.e u ap. ' /
dec. '
aP,
ox*. + o..v..(T - T
)
+ o..v..T - q. . + pr.ij ij ijMj r ijMj M.1 r
or
by
rearranging
(ps+
p -o..v..)T
+(p
-o..)ee.+p g.ij
'+ pTs= o..v..(T -T
)
- q. . + pr.(2.18)
Employing
the
relations(2.15)
(2.17)
obtainedfrom
the
secondlaw
andassuming that the
coefficient ofthermal
expaniontensor
is
invariant
withrespect
to
time, (2.18)
reducesto
p g. + pTs= -q.. +pr.
(2.19)
dp
Substituting
the
constitutive relation(2.15)
into
(2.19)
yields*v
T?V
L(2.20)
p g. - pT + To.y.. = -q. . + pr. ap. '
ataT 'J 'J u
Expanding
the time
derivative
ofthe
Helmholtz
free
energy,
(2.20) becomes
dip
Si
/aV
+ pT T + x aT2
+
To..y
-ijMj
e.. +
araee. 1J
- q. . + pr.
22 a ijj
arapt
s,
(2.21)
Before
proceeding
any
further in
the
analysis,
closedforms
ofqi,
vjri andgi
-k.T,
(2.22)
ij 'jwhere
ky
is
the thermal
conductivity
tensor.
Chester
[15]
modifiedthe
heat
flux law
using
aMaxwell
viscoelastic model appliedto
heat
transfer.
Here
aKelvin
heat
flux
modelofthe
form
q.= -k..T,. +
p.
(2.23)
1 ij j ri
is
proposed,
where-kjjT.j
is
the
viscousheat flux
andPi
is
the
"elastic"
heat flux.
For the
Helmholtz
free
energy
function,
Green
andNaghdi
[16]
proposethat
afunction
in
ee^
andT
ofthe
form
T
/
T \(2.24)
1 T
/
Tip = ip_ + D
,.ef-.e,,
C
In
2p
'Jkl 'J^' vT \
T
"
r r
is
a sufficientrepresentation ofuy
whereuyo
is
the
free
energy
in
the
referencestate,
Dyki
arethe
elasticmoduliandCv
is
the
specificheat
atconstant volume.All the
aforementioned material quantities are assumedto
be
constant.Following
the
samelogic,
(2.24)
canbe
extendedto
include
an elasticheat flux
term
in
the
form
1 HP T
/
T \ l(2.25)
ip =
Vn+ D....E.8..Ef1
-
C
In - 1 - -mp.p. 0 2d 'Jkl 'J kl v T \ T / 2 ' 'K
r r
where m
is
amaterialconstant.In
orderto
define
Pi
(expressed
asgi),
the
secondlaw
ofthermodynamics
must once again
be
invoked.
Substituting
(2.23)
and(2.25)
into
the
secondlaw
resultsin
(T,.)2 T
_J---1
0,
=gj
= pm TT,. (T,.)2
(2.26)
-I pmp. +
)p.
+ k. >0. \ 'T
/ 1J Tor
In
orderfor
the
inequality
to
be
satisfiedthe
coefficient ofpi
must vanish.Therefore
(2.27)
For
simplicity,
let A=l/pm.
Using
(2.16), (2.23),
(2.25)
and(2.27)
equation(2.21)
canbe
expressed asT,.
-(k..T, ),.+ pC T +
p.
+p
.j.j v ,, M T
(2
2g)
=
Pr-TD.jkifykl
Equations
(2.1),
(2.27)
and(2.28)
form
the
coupledbalance
of momentum andconservation of
energy
relations which constitutethe
modifiedthermoelasticity
3.0
PROBLEM DESCRIPTION
3.1
DEFINITION
OF PROBLEM
The intent
ofthis
workis
to
obtain a suitabletheory
whichdescribes
the
propagation of
thermal
waves.In
orderto
simplify the
solution ofthe
governing
equations,
the temperature
and strain are assumedto
be
uncoupled.This
assumptionis
validfor
many
materials whenthe
rate of strainis
small.Furthermore,
the
problem consideredherein
is
that
of onedimensional
heat
conduction
in
afinite
slab composed of a material with constantthermal
properties.
The
slabis
initially
at a uniformtemperature
throughout
and nointernal
heat
generationis
present.One
boundary
ofthe
slabis
consideredto
be
insulated for
alltime
andthe
otherboundary
is
subjectedto
a pulse ofheat
flux for
a short period oftime
andis
then
insulated for
alltime
thereafter.
While
these
boundary
conditionsmay
seemunrealistic,
they
have
been
shownto
yieldmeaningful resultsby
Ozisik
andVick
[5]. The
solutionsfor insulated
andconvective
boundary
conditionsdiffer only
in
magnitude andduration
i.e.,
the
generaltrends
ofthe
solutions areidentical
for both. These
conditions areillustrated in
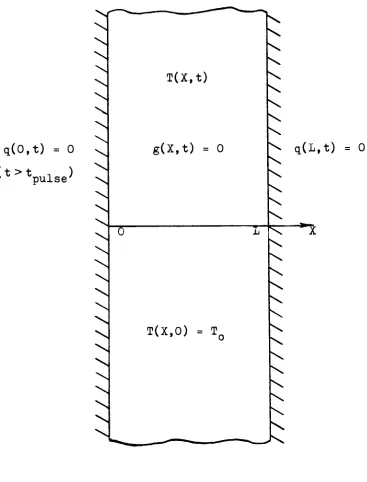
Figure
1.
For these
conditions,
equations(2.27)
and(2.28)
q(0,t) =
0
(
t
>t
,)
v pulse'q(L,t) =
0
[image:23.526.70.437.110.592.2]and
aT ar
ap
p
ark
-+ pC + +
-=o
ax2 v
at dx
T
dxdp
a ar=
inO<x<Lfort>0
dt T dx
the
initial
andboundary
conditions aret =
0,T(x,0)
=Tn
(3.1)
(3.2)
0 < x < L
and x =
0,
q(0,t) =Q
sin(a)t) 0 < t.<
-respectively.
q(0,t)=0
x =
L,q(L,t)
= 0t >
t> 0
3.2
DIMENSIONAL ANALYSIS
In
orderto
simplify
the
subsequent analysisthe
following
dimensionless
quantities are
introduced
u =
T/Tq,
;
dimensionless
temperature
X
= x/L;
dimensionless
position x = kx/L2;
dimensionless
time
b
=pL/kTo
;
dimensionless
elasticheat flux
Q
=qL/kTo ;
dimensionless (total) heat
flux
andk =
k/pCv,
is
the thermal
diffusivity
ofthe
material.Upon
substitution ofthese
quantities,the
governing
equationsbecome
du du db
b
du+ + + =0
(3.3)
dX2 dt dX u dX
*
= _Q-
(3-4)
dl U dX
where a =
AL2/KkTo.
Similarly
the
equationfor
the total
heat
flux
becomes
Q= - +b
ax 311
(3.5)
4.0
FINITE ELEMENT
IMPLEMENTATION
4.1
FUNCTION
APPROXIMATION
The
non-dimensionalform
ofthe governing
equations,
asdeveloped in the
previous
section,
area2u au ab b du
(3
3)
- + + + =o
v '
ax2 di ax
u dX
and
*
= -a-
(3.4)
dt u dX
The
solutionto the
abovenonlinear, coupled,
partialdifferential
equationsis
accomplished via
the
Galerkin
finite
element method[17].
For this
analysislinear
elementswere usedfor
simplicity.The
dependent
variables u andb
areapproximated
by
u(X,t)=
j[
ip.(X)U.(t)(4ll)
i i
i=l
and
b(X,t)
=>
(p.(X)B.(t)(4>2)
i ii=l
wherevj/i(X) and
$i(X)
arethe
shapefunctions,
U;
andBi
arethe
nodalvaluesofthe dimensionless
temperature
andheat flux
respectively
and nis
the
total
numberof nodes contained
in
the
model.Figure
2
illustrates
the
form
oftypical
shape
functions
usedfor
one-dimensionallinear
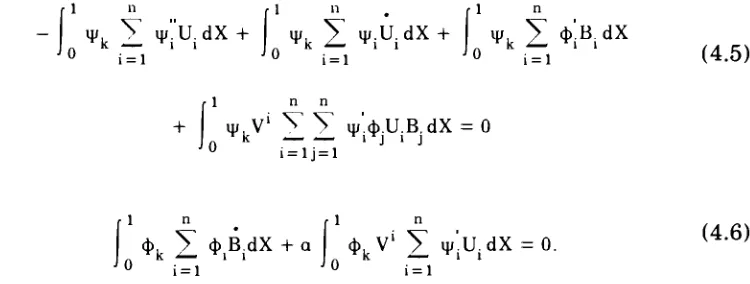
elements.Substituting
(4.1)
and(4.2)
into
(3.3)
and(3.4),
respectively
yieldsthe
X
CM
I
CQ
0)
a
OJ
rH
w
OJ
u
o
<H
OA PI O
H
O
P-4
<D
ft
nJ
J=!
oo
K>
CM
T
j=:CM
OJ
derivatives
withrespectto
position andtime,
respectively)n n n
-y
ipM(X)u.u) +y
ip.(X)u.(t)+y
^'.(xjb.w
J- 1 1 J- T1 1 M 1
i=l i=l i=l
n n
+
v1
y
y
ip'.(x)u.(t)<p.(X)B.(t) *o* < i .
j j i=ij=i
(4.3)
and
v-'
i
^
(4
4)
>
<J>.(X)B.(i)+ qV>
ip.(X)U.(x) *0 l*'*;i=l i=l
Note
that
expressions(4.3)
and(4.4)
are nolonger
exactly
equalto
zero sinceapproximate representation
for
u andb
are used.Hence,
(4.3)
and(4.4)
arecalled residuals of
their
original equations.The
variable Vi presentin both
equations
is
afunction
whichtakes
into
accountthe non-linearity
i.e.,
1/u
andis
dependent
uponthe
finite
element nodein
question.It is
discussed further in
Appendix
A.
4.2
WEIGHTED RESIDUAL
The
nextstep in the
finite
elementformulation
ofa problemby
function
approximation,
is
to
weightthe
residual sothat
it
may
be
set equalto
zeroagain.
This
accomplishedby
selecting
aweighting
function,
Wk
andmultiplying
eachterm
in the
residualby
it.
The
weighted residualis
then
integrated
overthe
domain
ofthe
continuumin
question and setequalto
zero.The
selection ofthe weighting
function determines
the
particularsubcategory
of
the
finite
element method used.When the weighting
function is
chosen asijfK(X),
the
procedureis
known
asthe
Galerkin
method.The Galerkin
methodis
highly
popular sincethe
selection ofthe weighting
function is greatly
general,
each equationis
multipliedby
adifferent
shapefunction.
Different
functions
willbe
shownin this
analysis,
but
both
are ofthe
form
shownin
Figure
2.
Upon
weighting
andintegrating
overthe
domain,
expressions(4.3)
and(4.4) become
1 n
VL
1 n
y
v:u.dx +j
Vk
i
v.u.ax +1
Vk
i
<p;bi
i=l i=l i=l
dX
(4.5)
f1 + n n ip.V1V
Y
ip".(p.U.B.dX = 0k i j i j
i=lj=l
and
1 n
rx n
4>,
y
<J>B.dX + a <t>,V'
y
ip'.U.dX = 0._ Tk ^ M l Tk J M i
i=l
(4.6)
i=l
The
order ofthe
derivative
in
the
first
term
of equation(4.5)
canbe
reducedby
trading
one ofthe
differentiations
between the weighting
function,
ipk,
andthe
shape
function,
jjjj.This is
accomplishedby integrating
the
first
term
by
parts.Equation
(4.5)
then
becomes
ip'k
y
v'.U.dX-ipk
I
ipll +Vk
I
V^dXi- 1 ' i=l
'O 'O :_ | r1 n
0 i=i
1
0 ,=| +
i=l
1
0
1 n
i=l
(4.7)
uj,
V
(b'.B.dX
+ ip,V1
y
y
ip'.cJj.U.B dX = 0.Tk . M l
I
a k L MM l J
By
reversing the
order ofthe
integration
and summation signs(4.7)
and(4.6)
[image:29.526.101.476.192.334.2]y
i=l
ipkip.dX
u.+
y
i=l
ipkip.dX
yi
i=l
ipk<J>.dX B
(4.8)
and
yi
i=ij=i f1
V ip,ip.cb.dX k i J
BU
j iip.
y
ip.u.i=l
y
i=l
ipk4>.dX
B.
+ ay
i=l
Vip^dX
k^i U.
= 0.
I
(4.9)
A
morecompactform for
(4.8)
and(4.9)
is
and
K,
U. +C. U.
+L.,
B. +W...
BU. =Q,
ik i ik l lk l ijk j l ^k
D.,B.
+ aE..U. =0ik i ik i
(4.10)
(4.11)
where
ik ipkiptdX
(4.12a)
D., ipkip.dX
(4.12b)
ik
VVk<dX
(4.12c)
K. ik
ipkip.'dX
(4.12d)
L ik
ipk<P.dX
(4.12e)
and
n
i=l
By
multiplying
Wjjk
by
Bj
in
(4.10)
the
equation canbe
expressedas%
(4.12g)
where
K..U.
+C.
U. +L.,
B. + NU.
=Q,
ik 1 ik i ik i ik i k
N.. =W.,B..
ik ljk j
(4.13)
This form
facilitates
the
implementation
of(4.11)
and(4.13)
into
a computeralgorithm.
The
details
ofthe
integration
necessary
to
form
the
coefficientmatrices
(4.12)
arefound in
Appendix
A.
4.3
TEMPORAL APPROXIMATION
With
(4.11)
and(4.13)
the
originalgoverning
equations,
which containedpartial
derivatives
with respectto
space andtime,
have
been
reducedto two
sets of
ordinary differential in time.
With
afurther
approximation, the
temporal
derivative
canbe
eliminatedto
obtaintwo
sets ofalgebraic equations.For
first
ordertime
derivatives,
the theta
methodis
often employed[17]. This
methoduses a
finite
difference
schemeto
representthe time
derivative
variableand a
weighting
technique to
obtain an average ofthe
dependent
variable attwo
consecutivetime
steps.For
a singleordinary
differential
equation ofthe
form
x =
flx.t)
the
theta
methodtakes
onthe
form
xJ+1_xJ
=
At[9fj+1
where,
At
is
the time
marching
increment,
6,
the weighting
parameter andthe
superscripts
j
andj
-I-1
indicate
the
valuesofthe
variables atatime,
t
andatime
t
-I-At
later,
respectively.Applying
the theta
methodto
(4.13)
and(4.11),
the
expressions
become
C
ikUj+1-Uj
I I + AtM. ik 8UJ.+1 +
(1-8)UJ
+AtL
ik8BJ+ 1
+ (1-8)BJ
= At 8 Of1 +
(1-0x4
and D iki+1
i i
Bj+1-Bj
+ aAtE ik
euj+1
+
(i-9)u.
i i
where
Mjk
=Kik
+
Nik.
Solving
(4.14)
and(4.15)
for
Ulj
+1andBy
+1respectively,
yields(4.14)
(4.15)
C,
+At9M.,
ik ik
UJ+1
C.
-At(l-9)M.,ik ik
UJ
AtGL.,
BJ+i-At(l-8)L.,
B. + Atik i ik i
9QJk+1
+
(1-8)04
and
D,BJ+1
= D.,BJ + 1
-aAt(l -6)E,UJ
ik i ik i ik i ik i
(4.16)
(4.17)
Since
the
preceding
systemsofalgebraic equations arecoupled,
they
mustbe
solved simultaneously.Solution is
obtainedby
assuming
a value of one ofthe
dependent
variables andsuccessively
iterating
between
equations untilthey
are satisfied within some errortolerance.
A FORTRAN
program whichperforms all of
the
numerical manipulationsnecessary
to
construct and solvethe
sets of equations givenby
(4.16)
and(4.17)
is
found in Appendix B.
When
employing
the
theta
methodfor
solution offirst
orderdifferential
equations,
the
analyst mustchoose a valuefor
the
weighting
parameter, theta.
With
theta
equalto
zero and onethe
familiar forward
the
backward
difference
schemes are recovered.
Comparisons
of solutionsto differential
equationsusing
various values oftheta
are performedin
Reddy
[17]
andBurden
andFaires [18]. Both
referencesindicate
that
a value of6
=\
generally
producesthe
most accurate solution.When
theta
equals one-halfthe
"6"-method
is
generally
known
asthe
Crank-Nicolson
finite
difference
scheme.In
additionto
greater
accuracy,
The
Crank-Nicolson
schemehas
the
additionalbenefit
ofbeing
unconditionally
stable.For these
reasonsthe
Crank-Nicolson
schemeis
5.0
RESULTS
The
problem of one-dimensionalheat
conductionin
afinite
slab wassolved
using the
finite
element method.From the dimensional
analysisperformed
in
Section
3.0,
all ofthe
material propertieshave been lumped into
the
dimensionless
parameteralpha,
a.Solutions
were obtainedfor
different
values ofalpha
to
demonstrate
its
effect onheat
transfer.
Note
that
for
alphaequal
to
zerothe
problemreducesto
that
of classicalheat
conduction.5.1
TEMPERATURE
RESPONSE
Figure
3
depicts
the temperature
response with respectto time
at a pointin
the
slablocated
atX
=1.0.
The
responseis
givenfor
alphaspanning three
ordersof magnitude
for illustrative
purposes.For the
lowest
value ofalpha, the
temperature
response exhibits abehavior
that
is
similarto
that
predictedby
the
classicaltheory
ofheat
conduction.However,
the
presence ofthe
overshootin
the
solutionindicates
that
elasticheat flux is
present.Utilizing
the
terminology
associated withvibratory
mechanicalsystems,
it
canbe
saidthat
heat
conduction with small values of alphais
highly
damped
andhas
alow
natural
frequency.
For the
intermediate
value ofalpha showni.e.,
=100,
the
oscillatory
behavior
ofthe temperature
becomes
more pronounced.This
trend
continuesasalpha
is
increased.
Increasing
alphain
the
governing differential
equationshas
the
effectofincreasing
the
thermal
"stiffness" ofthe
slab.This is
analogousto
adding
astiffer
spring in
a mechanical system.The
additional stiffness causesthe
natural
frequency
ofthe
thermal
responseto
increase
andit
reducesthe total
~
0=9:6
Z
R:00
LU
OlOlO
O
-:-.-H
:II
J
IIa!
e>:
e
:: 1 j3Pj,
H <s
O
CD <IJ
r-t
>
CO
o
H
f.n
3
o
<H
QJ CO
o Pj CO <D
E
OJ
j3
QJ
no
H
shift
in
the
temperature
responsefrom
adissipative
or viscous natureto
aconservativeorelastic nature as alpha
increases.
5.2
THERMAL
FLUX
To
further illustrate
the
shiftfrom
viscousto
elasticbehavior in
the
thermal response,
Figures
4-6
givethe
heat flux
profiles withinthe
slabfor
the
three
valuesofalpha considered above.Note
that for
each value ofalpha, the
heat fluxes
are shown atdifferent
instances
oftime.
This
wasdone
because
the
thermal
disturbances
travel
athigher
speeds as alphaincreases.
As defined
in
Section
2.0,
the
total
heat flux is
givenby
the
classicalFourier
or viscousterm
and
the
newly
introduced
elasticheat flux.
For
smallalpha,
asdepicted
in
Figure
4,
both
the
viscous and elasticheat
flux
contributesignificantly
to the
total
flux.
In the
median ranges ofalpha,
the
total
heat flow is
comprisedprimarily
ofthe
elasticheat flux
asillustrated in
Figure
5.
Figure
6
displays
the
heat
flux for large
alpha.In
this
figure,
the
curvesfor
the
total
andelasticheat
flux
arenearly identical
indicating
that the
elasticheat
flow is
the
primary
mode ofheat
conduction.For
all ofthe
flux
plotsshown,
the
total
flux
at
the
boundaries
is
zero ornearly
zero.This
agreeswiththe
fact
that
insulated
boundaries
wereimposed
uponthe
slab.Since both
the
viscousand elasticheat
fluxes
were computedusing
numericalapproximations,
they
do
not always addto
yieldexactly
zeroatthe
boundaries.
5.3
THERMAL WAVES
To illustrate
the
propagation ofthermal
wavesin
the
slab,
temperature
profilesatvarious
instants
oftime
are givenin Figures 7-9 for
the
samethree
<
LUo
CO UJo
Io
Z
LEGEND
ELASTIC
0.4-'%
VISCOUS
/
V*-^*^
^^*
^^s
TOTAL
*
X
0.3- * *X
* * */
\
\
\
0.2-o.i- # %
-A
#**?
-A ?* ?\
**jm%3
o.o-* -0.1- 0 * # ja
-10.0
-0.2- ?t
-0.15
4 0 -0.3 * *?
%*.
* I I0.0
0.2
0.4
0.6
0.8
NON-DIMENSIONAL
POSITION
1.0
Figure
4:
Heat Flux Profiles
for
Oi
=10.0
andT~
[image:37.526.48.465.91.644.2]X
3
<
UJX
O
co
Z
UJ
Q
i
Z
O
z
0.2
0.4
0.6
0.8
NON-DIMENSIONAL
POSITION
[image:38.526.54.467.97.659.2]10.0
X
z>
_l u_
!<
UJO
CO
UJ
O
i
Z
O
8.0-
6.0-
4.0-2.0
0.0
-2.0
LEGEND
ELASTIC,,,
a
=1000.0
t
=0.025
o.o
0.2
0.4
0.6
0.8
NON-DIMENSIONAL
POSITION
1.0
[image:39.526.49.466.98.645.2]2.0
oc
ID
!<
QC UJ CL.
1.8
1.6
O
coZ
UJ
1.4
Q
i1.2
1.0
LEGEND
r
=0.01
"t'-OJ""
t""
a
=10.0
o.o
0.2
0.4
0.6
0.8
NON-DIMENSIONAL
POSITION
1.0
[image:40.526.48.468.89.644.2]1.6
<
UJ
CL
1.7
UJ
1.6
3
1.5
LEGEND
,
t-
0.01
<#T^0ff
'"
"6.T"
a
-100.0
O
CO
UJ
a
1.4
1.3
O
1.2-1.1
1.0
"'.,...
0.2
0.4
0.6
0.8
NON-DIMENSIONAL
POSITION
1.0
[image:41.526.50.468.87.647.2]1.5
1.4-LU CSC oc UJ a. UJO
CO iLEGEND
t
=0.01
"t"""0.05"'
a
=1000.0
1.3
1.2- 1.1-- * '. * '. c 1 i -^ -* i * -i t -' -t n ^ t ^ : c '. -i s ' -** " >
? ''
? ^^^
.
1.0
dm
0.6
0.8
1.0
NON-DIMENSIONAL
POSITION
[image:42.526.47.462.93.642.2]applied pulse
through
the
slab priorto
being
reflectedby
the
right surface ofthe
slab.A
previous remarkregarding
the
increase
in
wave propagationspeedwith
increasing
alphais
clearly
shownin this
series offigures.
For
eachvalueofalpha
considered, the thermal
wave reachesthe
right wallin
aprogressively
shorterperiod of
time.
In
allthree
figures,
the temperature
profileis
givenfor
x =
0.01.
For this
instant
of
time,
the thermal
pulseis
observedto
penetratedeeper into
the
slabfor higher
valuesofalpha.These
two
facts
verify that
the
thermal
wave propagation speedincreases
as alphadoes.
This
ties
into
the
observationthat the thermal
"stiffness"
increases
with alpha.The
propagation speed of sound wavesin
asolid
increases
asthe
stiffness or moreprecisely the
elasticmodulus,
ofthe
material
increases.
The
results ofthis
analysisindicate
that
the
propagationspeed of
the
thermal
wavesincreases
asthe
thermal
"stiffness" ofthe
slabmaterial
increases.
Since
these
results concur withthose
for
first,
orordinary,
sound waves
in
asolid, the
analogy between
thermal
and mechanical wavepropagation
becomes
more apt.Figures
7-9
also providesomeinformation
onthe
viscous/elastic nature ofthe
heat flow
withinthe
slab.For
low
alpha, the thermal
waveis
wide andsmall
in
amplitudeindicating
that the
applied pulsehas
largely
diffused
outin
the
slab.As
the
alphaincreases
the thermal
wavebecomes
more welldefined
i.e.,
it
reducesin
width andincreases
in
amplitude.This is
due
to the
presenceof a
larger
elasticheat
flux
which requires alonger time
to
decay.
Figure
10
shows
the thermal
wave afterit has
reflected offthe
rightboundary
ofthe
slab.Note
that
the
maximum amplitude ofthe
wavehas decreased
andthe
minimum
temperature
in the
slabhas increased. As
the
thermal
wavetravels
UJ
(jC
ID
!<
ac UJ cl1.5
1.4-
1.3-<
Z
O
CO
LU
1.2
i
1.1-1.0
*
LEGEND
t
=0.055
V="6.065"
ex
=1000,0
.,
o.o
0.2
0.4
0.6
0.8
NON-DIMENSIONAL POSITION
1.0
Figure
10:
Temperature
Profiles
f
orCX
=1000.0
[image:44.526.55.463.91.627.2]of
the
materialin
its
wake.This
phenomenon continues untilthe
wavehas
completely
dissipated
andthe
slab reaches a uniformtemperature.
5.4
FINITE
ELEMENT
PROGRAM
Before
making any
final
conclusions,
some comments onthe
finite
element model and
the
FORTRAN
code usedto
solvethe
problem ofthermalwave propagation are
in
order.Since
one-dimensionalheat
transfer
is
assumed, the
finite
element modelsimply
consists of astring
ofone-dimensional
"line"elements.
The
program allowsthe
slabto
be divided
into
any
number of uniform size elements.The
number ofelements usedin the
analysis was varied
to
observeits
effectonthe
solution.For
smallmodelsoftento
twenty
elements,
convergencewasvery
rapidi.e.,
withinfive
iterations. The
small models also allowed a
large
time
marching
increment
to
be
used whilestill
maintaining
afast
convergence rate.Unfortunately,
these
modelsdo
notyield enough
information
withinthe
slabto
produce acceptablefigures
withoutcurve
fitting.
A
mediumsize model offifty
elements was usedexclusively
to
produce allthe
figures
withinthis
work.The
convergence ratefor
this
size modelis
alsoacceptable
but is
highly
dependent
onthe
time
marching
interval.
For
time
intervals
onthe
order of0.01
dimensionless
time units,
convergence could notbe
obtained withinthe
maximum number ofiterations
allowed.The
maximumnumberof
iterations
built
into
the
code serves as asafety
to
prevent aninfinite
loop
situation.Due
to
the
large
number of mathematical manipulationsrequired
for
eachiteration,
the
iterations
arelimited
to
amaximum of100.
A
time interval
of0.001
dimensionless
time
units produced convergence withinalpha required
the
largest
number ofiterations
andtherefore
were usedto
judge
convergence rates.Time intervals
onthe
order of0.0001
units yieldedrapid convergence.
In
orderto
keep
the
total
number ofiterations
to
aminimum
(total
iterations
is
givenby
the
number ofiterations
at eachtime
step
multipliedby
the
number oftime
steps) atime marchng
increment
of0.005
non-dimensional
time
units was utilized.Convergence
withthis
increment
waswithin
five iterations
ateachtime
step.Large
models of100
elements were experimented withbriefly.
The
results
from
these
models were notany
different from
anaccuracy
point-of-view, than
the
medium sized model.However,
whenusing
this
number ofelements,
a much smallertime marching
increment,
than
those
discussed
above,
had
to
be
used.This,
coupled withthe
fact
that the
number ofmathematical operations performed at each
iteration
is
a cubicfunction
ofthe
number of elements
used,
requireslarge
amounts of computertime
to
obtainthe
entire solution.For this
reasonthe
major portion ofthe
analysis wasperformed
using
a medium sized model.Mention
was madein
section4.0
that the
solution was obtainedby
successively
iterating
between
the
two
systems of equations until aconvergence criteria was satisfied.
The
criteria usedfor
convergence wasthat
the
difference
between
temperatures
obtained at subsequentiterations
be less
than
a specifiedtolerance.
Since
the
temperature
varies at eachnode,
andinfinite
norm ofthe temperature
difference
at respective nodesis
obtainedto
determine
the
maximumchangein
temperature
betwen
iterations.
When this
value of
the
infinite
norm ofthe temperature
"vector"
becomes less
than the
convergence
tolerance
usedin
the
FORTRAN
code was5X(10)-6.
Note
that
is
the
smallestvaluethat
canbe
usedwithsingleprecision computer arithmetic.The final
portionofthe
discussion deals
withthe
appliedtemperature
flux
at
the
left boundary.
Two
generaltypes
offunctions
were experimentedwith,
namely
astep
input
andahalf-sine
pulseinput. The
amplitudeandduration
ofthe
pulseinput
were variedto
observetheir
effect onthe thermal
response.The
results were again analogous
to those
of a mechanical systemi.e.,
the
amplitude and
frequency
ofthe thermal
oscillations varied asthe
input
pulsewas modified.
For
all ofthe
figures
presentedin
this
section a pulse with anamplitude of
10.0
dimensionless
heat flux
units was used.The step input
wasused
to
verify that the
computer code wasfunctioning
properly
andhence
no6.0
CONCLUSIONS
From
the
foregoing
analysis,
it has been
shownthat
it is
possibleto
modify the
classicaldiffusion
equationto
accountfor
thermal
wavepropagation.
This is
accomplishedby including
a secondterm
in
Fourier's law
of
heat
conduction.This
secondterm
has
been
calledthe
"elastic"heat flux
vector
due
to
the oscillatory
behavior
ofthe temperature
withinthe
media.The
nature of
the
solutionto
the
proposedgoverning
equationsintimate
that
the
methodology
usedherein is
plausible.However,
no experimental evidenceexists
to
verify
ordispute
this.
In
orderto
perform such acomparison, the temperature
field
within aninsulated
slab at consecutiveinstances
oftime
is
needed.For
a quasi-static processoccuring in
a conventional media such as ametal, this
data is
easily
obtainable.
Aquisition
ofthis
samedata
in
a materialthat
promotesthermal
wave propagation
is
precludedfor
the
following
reason.Thermal
waveshave
been
observedonly in
materials withhighly
orderedmicrostructuresdevoid
ofimpurities
ordiscontinuities.
The
presence of atemperature
sensing
probewithin such amaterial would
introduce
adiscontinuity
thereby
disrupting
the
flow
ofany
thermal waves.Some data
couldbe
acquiredby
using temperature
probes at
the
boundaries
ofthe
mediato
observetemperature
fluxuation
withtime
at a single point.With
this
in
formation,
the
dimensionless
parameter, a,
could
be
changedby
varying the individual
quantities which constituteit.
two
setsofdata
shouldfollow
the
trends
presentedin
the
previous sectionif
the
proposed
governing
equations are correct.Possible
extensionsto the
workdone
in
this thesis
is
the
solution ofthe
governing
equationsin
two
dimensions.
Such
a solution could provideinformation
on whetherthermal
waves exhibit constructive/destructiveinterference
like
other morefamiliar
waves.This
couldfurther
the analogy
betwen
first (ordinary)
andsecond(thermal)
waves.Another
obviousextensionwould
be
performing
experiments whilevarying
the
parameter alpha asREFERENCES
[1]
Peshkov,
V.
'"Second
Sound'in
Helium
II."Journal
of
Physics
(USSR)
8
(1944):
381.
[2]
Ackerman, CC,
Bertman
B.,
Fairbank
H.A.,
andGuyer,
R.A. "Second
Sound
in
Solid
Helium."Physical Review Letters
16
(1966):
789.
[3]
Bertman,
B.
andSandiford,
D.J. '"Second
Sound'in Solid
Helium."Scientific American
May
1970,
pp.92-101.
[4]
Lord,
N.W.
andShulman,
Y.
"A
Generalized
Dynamical
Theory
of Thermoelasticity."Journal
of
Mechanical Physics
in
Solids
15
(1967): 299.
[5]
Ozisik,
M.N.
andVick,
B. "Propagation
andReflection
ofThermal
Waves
in
aFinite
Medium."Journal
of
Heat
andMass Transfer
27
(1984): 1845-54.
[6]
Bogy,
D.B.
andNaghdi,
P.M.
"On
Heat Conduction
andWave
Propagation in Rigid
Solids."Journal
of
Mathematical Physics
11
(1970): 917.
[7]
Gurtin,
M.E.
andPipkin, A.C,
"A
General
Theory
ofHeat Conduction
withFinite Wave
Speeds."
Archives
for
Rational Mechanics
andAnalysis 31 (1968): 113.
[8]
Green,
A.E.
andNaghdi,
P.M. "The Second
Law
ofThermodynamics
andCyclic
Processes."Journal
of
Applied Mechanics
45
(1978): 487.
[9]
Atkin, R.J., Fox,
N.
andVasey,
M.W.
"A
Continuum
Approach
to
the
Second
Sound
Effect."Journal
of
Elasticity
5 (1975):
237-48.
[10]
Coleman,
B.D.
andNoll,
W. 'The
Thermodynamics
ofElastic
Materials
withHeat
Conduction
andViscosity."Archives
for
Rational
Mechanics
andAnalysis
13
(1963): 167.
[11]
Kratochvil,
J.
andDillon,
O.W. "Thermodynamics
ofElastic-Plastic
Materials
as aTheory
withInternal
State
Variables."Journal
of
Applied Physics 40
(1969): 3207.
[12]
Mase,
G.E.
Continuuum
Mechanics,
Shaum's Outline Series
in
Engineering,
New York:
McGraw-Hill Book
Company,
1970,
p.131.
[13]
Karlekar,
B.V.
Thermodynamics
for Engineers. Englewood
Cliffs:
Prentice-Hall,
Inc.,
1983,
p.422.
[15]
Chester,
M.
"Second Sound
in
Solids."Physics Review 131 (1963):
2013-15.
[16]
Green,
A.E.
andNaghdi,
P.M.
"A
General
Theory
of anElastic-Plastic
Continuum."Archives for Rational
Mechanics
andAnalysis 18
(1965): 251-81.
[17]
Reddy,
J.N. An Introduction
tothe
Finite Element Method. New York:
McGraw-Hill Book
Company,
1984.
[18]
Burden,
R.L.
andFaires,
J.D.
Numerical Analysis. 3rd
ed.Boston:
APPENDIX
A
In
this section, the
details
ofthe
formation
ofthe
systemmatrices willbe
expanded upon.
The final form
ofthe
weighted residuals givenin Section
4.0
were <