RIT Scholar Works
Theses
Thesis/Dissertation Collections
1994
A Dynamic model to study the influence of alpine
ski boot characteristics on heel retention force
Elizabeth T. Hsiao
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
CHARACTERISTICS ON HEEL RETENTION FORCE
ELIZABETH T. HSIAO
A Thesis Submitted in Partial Fulfillment of the Requirements
for the Degree of Master of Science in Mechanical Engineering
Approved by:
Dr. Josef S. Torok (Advisor)
Dr. Jasper E. Shealy (Co-advisor)
Mr. Richard A. Schwartz (Xerox Corporation)
Dr. Charles Haines (Department Head)
Department of Mechanical Engineering
College of Engineering
Rochester Institute of Technology
I, Elizabeth T. Hsiao, do hereby grant Wallace Memorial Library of Rochester Institute of
Technology permission to reproduce my thesis
in
whole or in part. Any reproduction by
My
deepest
appreciationto
Dr. Torok for readily providing
supportto
meduring
all of
my
years atRIT
andhelping
methrough
the
mostdifficult
part, the
thesis.
Thank
you
to
Dr.
Shealy
for sharing
his incredible knowledge
andinsight into
the
world ofskiing
and ski
injury
research.Thanks
to
Dick
Schwartz
for
taking
the time
out ofavery
busy
schedule
to
providehis
usualthorough
andintelligent input
during
the
review ofthis
work.
Additionally,
thank
youto
Kathryn Playfoot for assisting
with portions ofthe
editing,
typing,
and curvefitting
analysis.I
would alsolike
to
acknowledge and expressmy
appreciationto
my
family,
friends,
and colleagues atXerox.
For
withoutthem,
none ofthis
wouldhave
been
possible.
Thank
youto
Ron Peck
for his incredible
patienceand support.And
ofcourse,
A
dynamic
modelrepresenting
analpine skiboot
underaforward
leaning
load
wassuccessfully
developed.
This
model wasbased
onthe
equationsofmotionfor
the
defined
system.
The
intent
ofthis
model wasto
provideaninitial,
first
orderinvestigation
ofthe
effect ofvariations
in boot design.
Specifically,
it
evaluatedthe
influence
of certainboot
characteristicson
the
verticalheel
force
onthe
boot
whenit is
capturedin
a conventionaltoe-heel
skibinding.
Boot
stifihess,
solelength,
functional boot
height,
andinitial forward
lean
anglewerethe
chosencharacteristics.Functional
boot height
refersto
adistance
along
the
upper shaftofthe
boot.
This
distance
is
defined from
the
pivot pointbetween
the
upper shaft andthe
lower base
to
asingle
loading
pointwhichis
assumedto
representthe
concentrationofthe
skier'sforward
load.
The initial
forward lean
angleis
the
angleformed
by
the
centerline ofthe
boot
shaftand averticalaxis when
the
boot
is in
the
unloaded condition.This
model consideredthe
stiffnessdiscontinuity
which occursif
anincreasing
input
force is
applied even afterthe
boot
shaftis flexed forward far
enoughto
a positionthat
contactsthe
boot's
built-in safety
hard
stop.As
expected,
greaterheel
forces
wereangle,
the
resultsfrom
the
model suggestedthat
very
different
phenomena occurto the
heel force
depending
if it is
examinedbefore
or afterthis
discontinuity.
For
the
first
condition,
whichis
the
situationbefore
the
discontinuity,
individual
variation of either ofthese
parameters causeddistinctly
different
valuesin
the
heel force.
But
for
the
secondcondition,
or situation afterthe
discontinuity,
variation ofthese
parametershad
no effecton
the
heel
force.
In
fact,
the
force
convergedto the
same value overtime.
In
contrast,
variation of either ofthe
two
otherparameters,
solelength
andfunctional boot
height,
causeddistinctly
different
valuesin
heel
force
during
eithercondition.
The
modelfound
that
if
the
range ofthe
boot
shaft motion waslimited
to
withinthe
first
condition,
then
boot
stiffness wasthe
predominate parameterinfluencing
the
heel
force.
If
the
motionandloading
wentbeyond
this
case,
into
the
second conditionrange,
then
functional
boot height
became
the
mostinfluential.
In
additionto the
modeldevelopment,
an exhaustive review ofprevious researchwas conducted on
topics that
pertainedto
alpine skiboot
parameters andinjuries
to the
lower
extremities ofthe
alpine skier.Research
of particularinterest
wasthe
efforts
to
characterize
boot
stiffness.Of
particularnotewerethe
worksby
Walkhoff
andBaumann
(1987),
Bonjour
andDelouche
(1989),
andthe
long-term
endeavorby
aworking
group
under
the
jurisdiction
ofthe
International
Organization
for
Standards
ABSTRACT
LIST OF FIGURES
iv
LIST OF TABLES
iv
LIST OF SYMBOLS
vCHAPTER
1)
INTRODUCTION
1
-
Review
ofPrevious Research
5
-
Characterization
ofBoot
Stiffness
5
-Forward Lean
Angle
10
-
Functional Boot Height
13
-
Applied
Skier Force
14
-
Concern
to
Safety
-Lower
Extremity
Injuries
1
5
2)
PURPOSE
19
-
Objectives
19
-
Restrictions
20
3)
DEVELOPMENT
OF THE THEORETICAL MODEL
21
-
The
Dynamic Model
21
-
Stiffness
Discontinuity
22
-
Model
Parameters
24
-
Model
for
First Condition
27
-
Equations
ofMotion
28
-
Generalized Forces
28
-
Kinetic
Energy
30
-
Potential
Energy
32
-
Dissipation Function
35
-Combining
Components
into
the
Equations
ofMotion
35
-
Application
ofGeneralized Momenta
36
-
Model
for
Second Condition
40
-
Equations
ofMotion
41
-
Generalized Forces
41
-
Kinetic
Energy
42
-
Potential
Energy
43
-
Dissipation Function
43
-Combining
Components
into
the
Equations
ofMotion
44
Assessment
ofDimensional Boot Properties
45
-
Approximation
of
Boot Stiffness
48
-
Dissipation
Factor
54
-
Additional Analysis Constraints
56
-
Maximum Forward
Lean
Angle
56
-Maximum Applied
Force
57
-
Heel
Force
-Linear
Spring
Stiffness
57
5)
COMPUTER SIMULATION MODELS
58
-
First Condition Program
58
-
Combined
First
and
Second
Programs
59
6)
RESULTS
OF
COMPUTER MODELS
60
-
First
Condition
Program
60
-
Effects
Due
to
Boot Paramters
60
-
Combined First
and
Second
Programs
65
-
Effects
Due
to
Boot Paramters
68
7)
CONCLUSIONS
AND FUTURE RESEARCH
73
-
Conclusions
73
-
Future Research
75
REFERENCE
LIST
77
APPENDIX
A)
BACKGROUND
WORK
ON
SKIER FORCE
-
Principle
ofConservation
ofAngular Momentum
A-I
-
Simple Case
A-IH
-
Simplified
Skier
Case
A-IV
-
Average Skier Example
A-VI
B)
STATIC MODEL AT CONDITION OF MAXIMUM APPLIED LOAD
B-I
C)
COMPARISON BOOT DATA
C-I
-
Dolomite
65C
Junior
Racing,
Front
Entry
C-II
-
Trappeur
Carbon,
Front
Entry
C-TV
D)
ACSL PROGRAMS
D-I
-"1STONLY.CSL":
solves
only
first
condition equationsD-H
-
"FIRST.CSL":
solves
only
first
conditioneqns,
use w/Second.
cslD-ITI
-
"SECOND.CSL":
solves
only
secondconditioneqns,
use w/First.csl
D-V
E)
ACSL PROGRAM RESULTS
-NUMERICAL DATA
E-I
-
For 1STONLY.CSL
E-fl
-
For FIRST.CSL
and
SECOND.CSL
E-XE
Figure #
Page
1
.1
Boot
Parameters
andForces
4
1
.2Typical
Applied
Torque
-Angular Deflection Response Curve
5
3
.1
Typical
Bending
Moment
-
Angular Displacement Response
Curve
23
3.2
Dynamic
Model
for
the
Boot
24
3
.3Free
Body
Diagram
ofModel
in First
Condition
27
3.4
Bending
Moment-Angular
Displacement
Curves for
Stiff
andSoft
Boots
33
3.5
Free
Body
Diagram
ofModel
in
Second Condition
40
4.1
Dimensional Data
for
Nominal Test
Case
(NordicaN95
5,
Rear
Entry)
46
4.2
Inertial Data
for
Nominal Test
Case
(NordicaN955,
Rear
Entry)
47
4.3
"Normal"Curve
for Development
ofNominal Test
Case for
K,
and v50
4.4
Screen Plot
ofOriginal Data
vs.Approximation
Curves
5 1
4.5
Screen Plot
ofFit Results After Convergence
52
4.6
Screen Plot
ofResults
from
Varying
Ko
andvTest Values
53
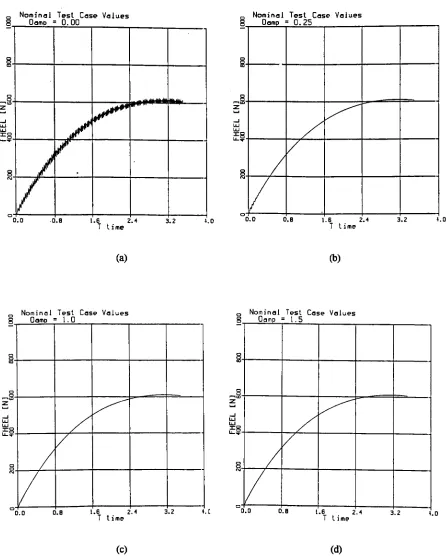
4.7
(a-d)
Plots
Illustrating
Effect
ofModifying
Dissipation
Factor,
"DAMP"
55
6. 1
Plots
Comparing
F
andFheel
asFunctions
off and a62
6.2
(a-d)
Plots
Illustrating
Influence
ofCharacteristic Boot Properties
onFheel
63
A.
1
Body
Acted
Upon
By
anImpulse
A-II
A.2
(a-c)
Simple
Rigid
Body
Model
A-D3
A.
3
(a-c)
Skier Model
Hitting
Obstacle
aty
A-V
B.l
Free
Body
Diagram
ofModel
atCondition
ofMaximum
Applied Load
B-I
B.2
Static Model Diagram
B-H
C. 1
Dimensional Data for
Dolomite 65
C,
Front
Entry
C-II
C.2
Inertial Data for Dolomite
65C,
Front
Entry
C-DI
C.3
Dimensional
Data for Trappeur
Carbon,
Front
Entry
C-IV
C.4
Inertial
Data for Trappeur
Carbon,
Front
Entry
C-V
C.5
Simplified
Boot Base Used
to
Approximate
JT
C-VI
C.6
Simplified
Boot
Shaft
Used
to
Approximate
IG
C-VTI
C.7
Simplified
Total Boot
Used
to
Approximate
JTot
C-VHI
LIST
OF TABLES
Table
#
4. 1
Boot Parameters
andTest Values
Symbol
Description
cD
Fheel
F,F(t)
/
H
la
Jt
Jtot
Ko
k
L
U
U
U
nia
m,
ms
P
Pi
q>
Q"Q,
t
T
T
V
Vls
Vts
Vcm, Va
aP
Ymax
<t>o
0
V COLocation
of center of massofshaftDamping
Constant
Dissipation
function due
to
damping
ofthe
boot
structureForce
Generated
atthe
Heel
Binding
Applied Skier's
Force
Maximum Force
Contact
pointofboot heel
to
binding
Moment
ofInertia
ofthe
shaftPolar Moment
ofInertia
ofthe
base
aboutT
Polar Moment
ofInertia
ofthe
total
boot
aboutT
Boot
Stiffness
Linear
Constant
Linear
Spring
Force,
Allows
for
binding
retentionLagrangian
=T-V
Boot
Sole Length
Internal Model
Parameter,
Distance between
boot
toe
and ankle pivotFunctional Boot Height
Mass
ofbase
Mass
of shaftPivot
point ofboot
shaftGeneralized Momenta
Generalized
Coordinates
Non-Conservative
Generalized
Forces
Time
Pivot
pointatboot
toe
Kinetic
Energy
Potential
Energy
Potential
Energy
due
to
linear spring
Potential
Energy
due
to
torsional
spring
Absolute velocity
of center ofmassofshaftRelative
Shaft
Flex
Angle
=0
-vj/
Internal Model
Parameter,
Angle between
Li
andL2
Maximum
Forward Lean
Angle
=<J)0
+
am^forward
Initial
Forward Lean
Angle
Absolute
Shaft
Flex
Angle,
independent
generalized coordinateBoot Stiffness Exponential Constant
Angular velocity
INTRODUCTION
Understanding
anddefining
the
effects of alpine skiboot
characteristics onskiing
performance
and skiersafety
has been
atopic
ofinvestigation
among
ski researchersin
industry
and academiafor
quite sometime.It
will continueto
be
atopic
ofinterest
andresearch
in
the
future due
to
alack
offundamental
quantitativeknowledge
anddata.
Much
ofthe
currentknowledge
regarding
boot
characteristics andtheir
effects onperformance
is
the
result of qualitativestudy
and experienceby
researchers,
manufacturers,
retailers,
and educated skiers.For
example,
it
is
known
that
a"stiffer"
boot
will providebetter
ski guidance controland a quickerresponse,
andtherefore
wouldbe
the
boot
of choicefor
a more skilled skier.A
"softer"
boot
willbe
moreforgiving
andwillnot respondas
quickly
to
loads
appliedby
askier,
andtherefore,
shouldbe
usedby
abeginner.
With
regardto
safety,
numerous studieshave been
conductedto
reportthe
injury
rateof
the
lower extremity
during
skiing.Some,
like
Shealy
andEttlinger's study
(1987),
have
even attributed certainfractures
ofthe tibia to
inadequate boot design.
However,
even with all ofthis
information,
there
still exists a vast number ofthe
performance
ofthe
ski-boot-binding
systemandthe
overallsafety
ofthe
skier.An
example
ofthe
importance
ofimproving
this
quantitativeunderstanding
to
both
the
skiing
researchcommunity
andinternational
monitoring
agenciesis
the
formation
ofaspecial
working
group
withinthe
International
Organization
for
Standardization
(ISO)
to
characterize
the
flexural
properties of skiboots.
This
group,
startedin
1983,
is
classifiedas
Technical
Committee
83
/ Subcommittee
3
/
Working Group
14 (ISO/TC83/SC3/
WG14).
Its
missionis
"to
evolvetest
methodsfor
the
flexural function
ofthe
upper andshaftpartsof ski
boots".
After
eleven years ofactivity,
this
working
group
is
stillgrappling
withsatisfying
its
mission statement.This
is
due
to the
complexity
anddifficulty
offinding
a reproducibletest
method.Through
their
collaborativeresearch,
the
group
has
found
that
characterization of a
boot's
flexural,
orstiffness,
propertieswasnot as simpleasdropping
a
boot
into
any
availabletesting
fixture
andreading
offthe
samevalueevery
time.
Rather,
they
found
that
measuredvalues aredependent
on alarge
number ofparameters,
such astesting
method,
testing
fixture,
use ofhuman
vs. prostheticlegs,
type
ofprosthetic
leg,
closure
tension,
etc.Although
one ofthe
main goals ofthe
working
group is
to
develop
aflexibility
measuring
method, the
group
has
alsoexpandedits interests into
studying
the
passive andactive
safety
issues
regarding
the
flexure
of skiboots.
Passive
safety
entailsdefining
the
safety.
Research
promoting
the
understanding
ofthe
activesafety
issue
providedthe
motivation
for
this
investigation.
Researchers
have
gathered some experimentaldata
onthe
effects ofchanging
afew boot
characteristicparameters,
such asboot
construction-front
vs. rearentry, stiffness,
and shaftheight
(Hauser,
Asang,
andSchaff
1985; Schaff,
Schattner,
andHauser
1987;
Walkhoffand Baumann
1987;
Bonjour
andDelouche
1989;
Hall,
Schaff,
andNelson
1991;
Schaff
andHauser 1993).
However,
most ofthese
workswere not conducted with
the
expressedinterest
ofunderstanding how changing
aparticular parameter would effect
the
boot
/
skier system.Rather
the
changein
parameterwas coincidental with
changing
test
boots
during
research effortsto
study
areas such ascontact
pressure, stiffness,
andflexibility.
Some
ofthe
researchers whohave
tried
to
model certain aspects ofthe
boot
andlower
extremity
interactions
areSchattner,
Hauser,
andAsang
(1985),
Lyle
andHubbard
(1985),
Quinn
andMote
(1993),
andYee
andMote
(1993). No
published workhas
been
presented,
however,
that
has
directly
addressedthe
issues
ofmodeling both
the
details
ofthe
boot
andthe
effects ofvarying
aboot's design
onthe
forces
generatedby
the
boot /
skier system.
The
workdeveloped in
this
paperis
aninitial,
first-order
attemptto
develop
a
dynamic
modelthat
can represent sucharelationship.The relationship
that
willbe
investigated
is
the
effectthat
certainboot
parameters,
namely
boot
stiffness,
initial forward
lean angle,
functional boot
height,
andboot
solethe
dynamic
conditions encountered
under aforward
leaning
movementandloading by
the
skier.
See
Figure
1.1.
Although
this
modelonly
deals
withthe
externalheel
force,
further
work onthe
model could allow
it
to
be
expandedto
consider other external orinternal forces
and/ormoments.
For example,
based
on research conductedby
Mote
(1987)
and colleagues(Mote
andHull
1978; Kuo, Louie,
andMote
1985),
extended workin
the
areaofforces
and moments about
the toe
andball
ofthe
foot
wouldbe
necessary
to
correctly
assessthe
implications
that
these
boot
parameters mighthave
onthe
forward
bending
forces
andmoments withrespect
to
binding
release.F
=Input
Skier Force
Heel
Force
Boot Sole Length
Figure 1.1 Boot Parameters
andForces. Note
that
boot
stiffnessis
depicted
as atorsional
Characterization
ofBoot
Stiffness
The
measurement
ofaboot's
stiffnessis
currently
madeby flexing
the
upper shaftof a secured
boot forward
andbackward
andrecording
the
angulardeflection
ofthe
shaftversus
the
appliedtorque.
This
procedure creates ahysteresis
curve similarto
Figure 1.2.
The
stiffnessofaboot is
characterizedby
this torque-angle
relationship.Stiffer
boots
tend
to
have
steeper slopes and softerboots have
gentler ones.Figure
1.2 Typical
Applied
Torque
-Angular Deflection
Response
Curve
Torque
[Nm]
Q^max.backward
C-max,
forwarda
[degrees]
The
technique
usedin
this
measurementis
notreadily
repeatable, standardized,
norconsistent
among
researchers and manufacturers.As
aresult,
the
shape and slope ofthe
curvesvaries
from
boot-to-boot
andtest-to-test.
Numerous
researchers(ISO/TC83/SC3/
WG14,
1983
-1993;
Walkhoffand
Baumann,
1987;
Bonjour
andDelouche, 1989)
have
attempted
to
develop
astandardized,
repeatable methodto
characterize aboot's inherent
stiffness.
HigMights
oftheir
workpertaining
to
boot
stiffnessfollows.
After
its
initiation
in
1983,
the
ISO working group
set outto
define
atest
methodto
define boot
stiffness.During
the
first
year, the
group
held
four Round Robin
meetings
fixtures
ontheir
own prosthesis orhuman leg.
The
results were scattered and wereattributed
to
avariety
ofuncontrolled
variables.Therefore,
a second experiment wasconducted and subsequent
meeting
washeld.
This
time,
they
tried
to
identify
an"ideal"
prosthesis
by
comparing
the
different
prostheseswithhuman
legs
via x-rays andtested the
different
prostheses withthe
same method onthe
samemachine.Again,
the
resultswerescattered.
A
prosthesis madeby
TUV (no.7
n)
was chosenfor
testing
andtwo
moreexperiments were conducted.
These
results were presented atthe third
andfourth
meetings.Both
experiments were conducted atthe
different
memberlabs
ontheir
different
test
machines and measuredthree
andfour
specifiedtest
boots,
respectively.The
results were
the
sameasbefore,
scattered.The
range ofmeasurements variedfrom
4to
7at
100 Nm
ofappliedforward
torque
and 4to
10 at200
Nm.
At
this point,
the
group decided
to
suspendits
efforts atdefining
atest
method and concentrateits
activitieson
defining
variables such asfoot bed
angle andforward
lean
angle,
whichcontributedto
someofthe
uncontrolledvariablesaffecting
the
flex
measurement.In
1988,
adetailed
testing
method proposalfrom
Dr.
C.
Brown
(ISO
1988)
wassubmitted
to
conduct stiffnesstesting
using human
test
subjectsinstead
of prostheses.As
of
early
1991,
afew labs
had
presentedtheir
results.Some
ofthe
conclusionsthat
they
found
werethat
prostheses always recorded greater stiffness valuesthan
human
testers;
promise
and wasbeing
consideredfurther.
Walkhoff
andBaumann
(1987)
did lab
testing
atRaichle
in
orderto
understandhysteresis
curve characteristics.Their
experiments evaluatedthree
types
ofboot
construction -
traditional
overlapping
front
entry,
three-piece,
and rear entry.Either
aprosthetic or
human
leg
was considered undervarying
temperatures.
From
the
hysteresis
curves
for
different
testing
conditions,
they
compared characteristics such as"average
stiffness",
"% energy dissipation
to total
energy
input",
andan"energy
dissipation
factor"
which was
the
actualdissipation
energy
divided
by
the
average stiffness.Similar
to the
ISO group
and workby
Bonjour
andDelouche
(1989),
their
results also showedvariability
between
prosthetic andhuman
legs.
They
also concludedthat test
results canbe
significantly
influenced
by
temperature
changes(20,
0,
and -10C),boot
construction,
andthe
closuretension
usedaroundthe
foot
or prosthesis.Bonjour
andDelouche
(1989)
performed stiffnesstesting
in
orderto
comparetheir
resultsof
using
aprosthesis withthose
ofthe
ISO working group
andto
gainknowledge
on
the
effect ofusing
ahuman
leg.
Their
experiments weredone
on atest
fixture
developed
in
the
Institute
ofMaterials
andMachines
ofEcole Polytechnique Federate
de
Lausanne
and usedthe
same prosthesisasthe
ISO
group,
no.7 II.
Tests
were conductedon
two
different
boots,
one of whichhad
stiffness adjustment capability.They
madethree
observations
based
ontheir
results.First,
for
the prosthesis, the
stiffness curves werealways shifted
up
andleft
suchthat
the
stiffnessvaluedetermined from
these
curves wasthe
influence
ofcorrectness
offit between
the
boot
andfoot
was notreadily
apparent.Their
overallconclusions
were similarto the
ISO
group's:the
boot
alone cannotbe
measured
for
a specificstiffness; rather,
it is
a result ofthe
combinedboot/leg
orboot/prosthesis
system.Additionally,
they
saidthat
stiffnessvalues canonly
be
compared,
and
only if
under similartest
conditions.
Observations
aboutstiffness
based
oninterpretation
ofresearchby
investigators
whose main objective was not stiffness characterization
follow:
Asang
andHauser
(1983)
discussed
experimental resultsthat
were usedto
demonstrate
the
International
Association
ofSafety
in
Skiing's(LAS)
standards#150
and#151.
They
looked
atboth
the
influence
ofthe
boot
soledesign
onthe torsional
momenton
the
tibia
andthe
influence
ofboot
shaftdesign
onthe
bending
moment.In
their
research on
boot
shaftdesign
which used a prostheticleg,
they
showedthat
both
the
applied
boot-top
force
andresulting
heel force
at a specifiedflexion
angle varieddepending
ontemperature
andboot design.
These
experiments reaffirmedthat
stiffnessincreases
withdecreasing
temperature
(20to
-5C) anddifferent boots have different
stiffnesses.
Based
ontheir
research,
they
proposeddifferent
stiffness curvesbased
onskiing
ability.Schattner,
Hauser,
andAsang (1985)
developed
a3+1
degree
offreedom,
two
dimensional
point mass model ofthe
skierfrom
the
knee
down.
Using
their
modelthey
made conclusions
regarding
elastic(conservative)
andinelastic
(dissipative)
boot
linearly
proportional
to
mass(M),
but
quadratically
proportionalto
size(L2).
They
alsoconcluded
that
withincreased
spsed andskill, the
skier's generatedtorque
increases,
thereby
increasing
the
needfor higher
stiffness.Thus,
skilled orS-type
skiers requirestiffer
boots
withhigher
damping,
andlearner
orL-type
skiers needsofter,
low
damping
boots.
Additionally,
in
orderto
ensurethat
maximalpressureand gradient arenotbeyond
excessive
limits,
skiers which generatehigh
moments;
i.e.
fast,
tall,
orheavy
individuals,
should use
boot
withrelatively high
shafts.Schaff, Schattner,
andHauser
(1987)
did
laboratory
testing
to
measurethe
pressure
distribution
effects onthe tibia
using
a pressure sensitive matdeveloped
atTUEV
Bayern.
Additionally,
they
recordedthe
heel force.
Test
parameters wereflexion,
temperature,
test
subjects,
boot
size,
genderby
virtue ofboot
sizeselection,
andboot
construction -
front
vs. rear entry.
They
found
that
stiffnessis
temperature
dependent;
however,
this temperature
dependence
couldbe
reducedif
aspring
damping
adjustmentwas
incorporated in
the
boot.
They
also concludedthat
smaller sizes shouldbe
softer andboots
shouldbe
classifiedaccording
to
genderand ability.Shealy
andEttlinger
(1987)
investigated
the
effectthat
boot design had
oncausing
the
tibial
bending
injury
known
as"in-boot
fractures"
in five
cases.They
presentedgraphics
representing
typical
hysteresis
curvesfor
recreational andracing
skiboots.
The
recreational
boot's large
area withinthe
loop
wasinterpreted
astypical
ofaboot
that
is
was said
to
feel
morelively
orspringy
because it
acts more"like
aspring
than
adamper."
(Note
that this
statement contradicts
the
onejust
madeby
Schattner, Hauser,
andAsang.)
From
the
results
oftheir
study,
they
also proposedthe
needfor
additionalstandards
for
stiffness as afunction
ofthe
skier's mass and ability.Also
there
is
aneedto
deal
withgenderdifferences
in
maximumdorsiflexion (although
Shealy
andMiller
(1989),
determined
that
genderis
notaninfluencing
factor for
maximumflexion).
Yee
andMote
(1993)
performedfield
andlaboratory
testing
to
quantify
and modelthe
forces
and moments atthe
boot
top
andknee.
These
factors
are affectedby
boot
stiffness and
inertial forces.
They
had
unexpected on-slopefield
results whichfound
that
the
moment versusflexion
responsedid
notfollow
the
typical
laboratory
hysteresis
curvenear
the
neutralflexion
point (20from
vertical,
for
their
model).Their
lab
curves,
however,
did
follow
typical
hysteresis
patterns as seenby
others.They
alsofound in
their
field data
that the
maximumbending
momentdid
not occur atthe
expected maximumflexion,
norany
large
anglefor
that
matter.It
shouldbe
notedthat their
bending
momentwas
the
moment atthe
boot top,
whichis
notthe
sameasthe
typically
measured momentat
the
distal
end ofthe tibia.
Additionally,
in
their
lab
testing, they
observedthat
softerboots
qualitatively
have
a greater nonlinearcharacteristic,
andtoward
the
forward limit
offlex,
the
slope ofthe
curveincreased
toward that
of a stifferboot.
Forward
Lean
Angle
The
definition,
method ofmeasurement,
and maximum rangefor
the
forward
lean
there
is disagreement
asto
how
this
angle shouldbe defined. Is
the
angle measuredfrom
the
vertical axisto the
anteriorblade
ofthe
tibia
orthe
centerline ofthe calf,
prosthesis orboot
shaft?Is
it
measuredfrom
the
horizontal
axisto
any
ofthese
reference points?What
is
the
maximum angle or range ofmotionthat
aboot
shouldbe
allowedto
flex?
Should
the
foot bed
angle,
whichis
withinthe
inner
boot,
be
considered?Walkhoff
andBaumann
(1987)
took
x-rays of eachboot
construction with ahuman
leg
atthe
anglesthat
they
called"neutral
position"and"40
forward flex
position".These
angles were measuredby
potentiometerslocated
atthe
anklejoint
axis and werereferenced
from
the
vertical axis.The
neutral position wasbasically
measuredin
the
unloaded condition.
For
the
overlap
andthree-piece
designs
at a 40forward flex
angle,
they
found
that the tibial
flexion
angle wasslightly
greaterthan the
boot
shaft angle.Their
study
andobservations were concerned with comfort and
fit,
but
this
example showsthe
potentialdifference
which can occurbetween
measured anglesif
based
onthe tibia
orboot.
In
1986,
afterdebating
some ofthese
questions,
the
ISO working group
decided
to
define
the
forward
lean
angle with regardto
their
testing
activities.They
madetwo
definitions,
onefor human legs
and onefor
prostheses.For
human
legs,
they
chosethe
ASTM
method(#F27.70, March, 1983)
whichmeasuresthe
distance from
the
vertical axisto the
line
containing
two
points onthe
anteriortibia surface,
25%
and75%
ofthe
length.
For
aprosthesis, the
angleis
measuredfrom
the
verticalto the
central axis ofthe
prosthesis.
Later,
the
definition
for
the
prosthesis wasleft
opento the
definition
usedby
Hall, Schaff,
andNelson
(1991)
looked
at angulardisplacement
versus pressuredistribution
in
skiers andnon-skiers
during
flexion
testing
in
alab.
They
found
that the
rate of
boot
flexion
is
boot,
notskier,
dependent.
Thus, they
inferred
that
non-skiersandbeginners
need a softboot
andadvanced
skiers need a stifferboot.
However,
both
boots
should allow a
full flexion
range,
whichwouldbe
25 with ahard
stop
atapproximately
40
from horizontal.
They
found
that the
actual range of motionfor
skiersis
16.64
1.15and 11.860.93
for
non-skiers.Hauser, Asang,
andSchaff
(1985)
madethe
following laboratory
measurements:pressure,
heel
force,
andlean
angle.Three
boots (A
- whichhad
alow
shaft,
B
-which
had
a medium shaft and stiffnessadjustment,
andC
- whichhad
ahigh
shaft)
were used.They
found
that the
range of motion ofthe
anklefor
optimal movement with no orminimal pain should
be
0to
30from
the
verticalaxis.IAS #150
statesthat the
maximumforward flex
angleis
40to
45 at200
Nm,
depending
oninterpretation,
and minimumflex
range shouldbe
up
to
20.
Additionally,
the
angulardeflection
due
to the
maximumloading
of200 Nm
should not changeby
morethan
30%
whentesting
in 0C
environment.Based
ontheir
research,
Shealy
andMiller
(1989)
proposedthat the
maximumforward flex
angle should notbe
greaterthan
30in
orderto
protect93%
ofthe
population
from
injury
due
to
excessiveflexion.
They
alsofound
no statisticaldifference
in
range of motionfor
age,
gender,
height,
weight,
andskiing
experience.They
quotedforward flex
angles
for
typical
racing, recreational,
andbeginner
boots
were27, 30,
and33,
respectively.
For
the
currentinvestigation,
whichonly
considersthe
boot,
the
lean
angle willbe
measured
from
the
verticalaxisto
the
centerline axis ofthe
boot
shaft.Functional
Boot Height
For
the
purposeofthis
investigation,
the
functional boot height is
consideredto
be
the
distance
along
the
boot
shaftto the
point of application ofthe
forward load
that
is
transferred
from
the
skier.This
load
is
assumedto
act as a concentratedforce.
Little
research wasfound
whichtried
to
define
this
point.Many
researchersjust
assume a pointnear
the
top
ofthe
boot.
One
group
ofresearchers(Schaff,
Schattner,
andHauser
1987)
werestudying
pressures
along
the tibia
for front
and rearentry
boots.
They
identified
the
locations
ofmaximum pressure
for both
constructions.For
front
entry
boots,
they
found
the
maximumpressure
to
be
generally
located
abovethe
instep
ofthe
foot,
orthe
lowest
point ontheir
pressure
measuring
matwhich waslocated approximately 4
cm abovethe
anklejoint.
For
rear
entry
boots,
the
location
was at or nearthe
boot
top.
Based
ontheir
evaluation,
they
stated a preference
for
ahigher
pressurelocation,
similarto the
rearentry
results,
andApplied
Skier Force
Initially,
this
investigation
intended
to
modelthe
loading
condition onthe
boot
by
the
skier as animpulse force
similarto
onethat
couldbe
encounteredduring
aforward
fall.
However,
no published sources of experimental ortheoretical
data for
such aforce
was
found.
Some
studies werefound
that
providedfield data for
normalcruising
maneuvers
(Hull
andMote
1982;
Quinn
andMote 1993).
Glenne
andVonAllmen
(1982)
developed
equations ofmotionfrom
modelsfor
normalskiing
activities such asfall
line
schussing,
sideslipping,
andturning,
but
they
did
not addressstopping
orfalling.
Schaff
and
Hauser
(1993)
did
conducttests
during
falls
and recordedforce
data;
however, they
only
looked
atbackward falls.
Therefore,
for
this
investigation,
asimple sinusoidalforcing
function
was chosento
represent
the
input force.
This
function
canbe interpreted
as aforward lean
loading
from
an
initially
unloaded conditionthrough
anincreasing
force
that
may
lead
up
to
aforce
that
is
great enoughto
representthe
same amount offorce
experiencedin
aforward fall.
A
more accurate
forcing
function
or anotherforcing
function
that
represents adifferent
loading
condition couldalwaysbe
added asfuture
work.Concern
to
Safety
-Lower
Extremity
Injuries
To
understandthe
impact
that
boot design
may
influence injuries
during
skiing,
aliterature
search onlower extremity
injuries
wasconducted.Researchers
have found
that
and part of
body
injured have
changed.The
following
arehighlights
ofthe
findings from
some
majorresearchers.
In
their
study
offour
Norwegian
ski areasfrom
1985-1986, Ekeland, Holtmoen,
and
Lystad
(1993)
found
that
40%
of allreportedskiing
injuries
were classified asLower
Extremity
Equipment Related
(LEER)
injuries.
Of
these
LEER
injuries,
56%
wereknee
sprains and
14%
werelower
leg fractures,
which were causedby
alack
oforlate
binding
release.
Interestingly,
70%
ofthe
lower
leg
fractures
were attributedto
alack
ofbinding
release.
Freeman
et al.(1987)
did
a comparisonstudy
ofdata from
four
Aspen,
Colorado
ski areas
for data
collectedfrom
1968-78
and1982-84.
They
wereinterested
only in
understanding
the
changing
patternsin
tibial
fracture incidences
overthe
years.They
found
that
there
was a continualdecline
in
tibial
fractures
from 12.9
injuries/
100K
skierdays
to
2.9/100K
for
1968-69
to
1983-84,
respectively.With
regardto the
population ofall reported
skiing
injuries,
the
incidences
oftibial
fractures
to
other classifications ofskiing
injury
alsodecreased (13%
to
8% for
1968
to
1983,
respectively).They
found
that
spiraltibial
fractures,
which aredue
to torsional
forces,
had
reduced
from
70.6%
to
51.3%
of alltibial
fractures.
They
attributedthis
decrease
to
improvements,
withregardto
protectionandreleasewhen undertorsion,
in
the
design
andperformance of
both boots
andbindings. Their
hypotheses
for why
the
incidences
ofspiralfractures
were stillcomparatively
higher
than
othertibial
fracture
types
werebecause
(a)
ski
injuries
inherently
have high
rotationalforces
and(b)
pooradjustment
ormaintenance
Inversely,
short obliquetibial
fractures
increased from
11.4%
to
32.4%.
These
injuries
aretypically
due
to
ahigh
energy
bending
moment,
whichis
often experiencedduring
falls
athigh
speeds.Freeman
et al. concludedthat
this
increase
implies
that
the
improvements
madeto
binding
designs
weremore effectivein
protectionoftorsional,
than
bending,
forces.
Johnson,
Ettlinger,
andShealy
(1993)
conducted,
in
Vermont,
aneighteen seasonstudy
(1972-1990)
ofall reported skiinjuries.
With
regardto
lower
leg,
ortibia,
injuries,
they
found
that the
incidences decreased
by
83%
overthe
years.Specifically,
twist-related
injuries decreased
by
90%
andbending-related injuries
decreased
by
74%.
Similar
to the
trends
observedby
Freeman
etal.,
they
found
that tibial
fractures
decreased
by
88%,
andof
these
fractures,
spiralfractures decreased
by
94%.
They
additionally
reportedknee
sprains andfound
that
gradeI
andII
knee
sprains(minor
to
moderatedamage)
decreased
by
70%
but
gradein
sprains(complete
disruption)
increased
by
209%.
Also,
these
gradeDI
sprains now constituted73%,
up
from
17%,
ofall
knee
sprains.Grade DI
sprainstypically
involve
injury
to the
anteriorcruciateligament
(ACL).
This increase in
gradelH
sprains was also observedby
otherresearchers
andmotivated
Schaff
andHauser
(1993)
to
performlaboratory
and on-slopeexperiments
to
investigate
the
influence
ofskiboot
construction onknee
injuries
such as severeknee
lesions
and, especially,
isolated
ACL
ruptures.Their
goal wasto
develop
ameasuring
device
for
researchusing
motionanalysis,
pressure andforce
measurement,
and
propose
animproved
safety
concept.These
experimentsspecifically
looked
atbackward
falls.
In
their
paper,
Schaff
andHauser
quoted numerous resourcesthat
proposeddifferent
theories
onthe
mechanismscausing
ACL
ruptures.These
include:
hyperextension
ofthe
knee
joint,
hyperflexion
ofthe
knee
joint,
andbackward falls.
Additionally,
they
mentionhybrid
hyperflexion-backward
fall
mechanisms such asJohnson's "boot
induced
ACL
injury",
alsoknown
asthe
"big
bump
-flat
landing"
theory,
and
Ettlinger
andJohnson's "phantom
foot
ACL
injury",
whichis
abackward fall
withtwisting.
They
also reference a modelby Bally
et al. whichfound
that the
load
onthe
ACL increased if boot
stiffnessincreased.
Shealy (1993)
compared skiinjury
data for
two
sampling
periods, 1978-81
and1988-90,
from fifteen
ski areas acrossthe
United States.
In general,
he found
that
the
overall
injury
ratedecreased
by
20%
overthe ten
years.Specifically
looking
atlower
extremity
injuries,
he
found
that tibial
injuries had decreased
39% (from 12.6%
to
7.7%
ofall
injuries)
and ankleinjuries decreased 47%
(11.5%
to
6.1%),
but knee injuries increased
by
20%
(27.2%
to
32.7%).
In
fact,
he found
that
knees
werereportedly
the
mostcommon
body
partinjured,
andthe tibia
and anklehad
slippedfrom
third
andfourth
to
fourth
and sixth most commonpart,
respectively.Additionally,
strains and sprains werethe
mostcommontype
ofinjury
at48.3%,
whilefractures
were second at13.5%.
Although
Shealy
found
that the
overallinjury
ratedecreased,
he
indicated
that this
was a modest reduction
in
comparison with changes observedfrom
the
1950s
to the
equipment
andtibial
fractures
andankle
injuries.
He
suggestedthat
currentskiing
safety
research should concentrate
on areas such asdesign
changesthat
couldinfluence
the
reductionof
knee injuries.
He
also
proposedincreased
emphasis onthe
use ofinstruction
to teach
skiing
safety.PURPOSE
Objectives
The
purpose ofthis
investigation is
to
develop
adynamic
modelin
orderto
assesscertaincharacteristics of ski
boots.
In
particular, the
primary
objectiveis
to
determine
the
influence
ofdifferent
skiboot
characteristics onthe
heel hold-down
force
while aforward
lean load is
supplied.The
development
ofthis
modelmay
provide additionalinsight
into
the
understanding
ofthe
dynamic
propertiesofthe
alpineskiboot.
The
developed
modelis based
onthe
equations of motionfor
the
boot in
whichcertain
boot
characteristics are varied.Boot
stiffness,
functional boot
height,
initial
forward
lean,
andboot
solelength
characteristics are evaluated.The
amount offorward lean
load,
orinput
force,
is
varied.The
variation ofthis
force
approximatesdifferences in
skiers'
strength, ability,
body
build,
etc.This
model also considersthe
stiffnessdiscontinuity
that
occurs whenthe
maximum
forward
lean
angleis
achieved.This
discontinuity
occurs whenthe
boot
shaftreaches
this
pointin its flexure
path and can nolonger
proceedfurther due
to
the
hard
stop
incorporated in
the
boot's design.
Forces
arenowbeing
transmitted
moredirectly
to
the
heel
sinceenergy
is
nolonger
being
absorbedby
the
flexing
ofthe
boot
shaft.After
developing
the theoretical
model,
computer simulations were performedusing
several variations ofthe
dynamic
model.The
equations of motionfor
the model,
and
consequently
the
heel
force,
were solvedusing
programs writtenin
the
Advanced
Continuous Simulation Language
(ACSL).
Restrictions
Since
this
modelis intended
to
be
aninitial,
first
orderinvestigation
ofthe
influence
ofboot
characteristics onheel
force,
it is
restrictedto
avery
simplifiedcondition.
In
developing
this model,
only
the
caseofaforward
appliedforce
is
evaluated.The
Principle
ofthe
Conservation
ofAngular Momentum
had
been
attemptedto
approximate
the
impulse force
that
is
generated atthe
skiboot
by
the
skierin
aforward
fall.
However,
due
to
lack
ofdata,
the
workin
this
areawas suspended and a sinusoidalforcing
function
was chosento
actuatethe
model.Additionally,
only
the
bending
characteristicsin
the
sagittal plane andposterior-anteriormovementsareconsidered.
Only
forces
andmoments onthe
boot
frame,
or outerstructure,
are considered.No
forces
atthe
boot
toe
or underthe
ball
ofthe
foot
areconsidered.
Additional
assumptionsinclude
the
boot
sole as a rigidstructure,
the
boot
pivotsabout
the
toe,
andthe
material properties ofthe
boot
(plastic
shell andinner
boot)
areDEVELOPMENT
OF THE THEORETICAL MODEL
The Dynamic Model
The
developed
model wasintended
to
provideaninitial,
first
orderinvestigation
ofthe
influence
of skiboot
characteristics onthe
verticalforce
generated atthe
boot
heel.
Many
simplifying
restrictionsandassumptionsweremade whendeveloping
this
model.Restrictions
andAssumptions:
The
skier'sforce is
consideredfor
the
case of aleaning
motionin
the
forward
direction
only.The
force is
applied normalto the
tibial
shaft and as a single pointloading
atthe
functional
boot height.
The
forcing
function
is
a sinusoidalfunction,
.
t
F\\t)
=f0
sin(),
for 0
<t
< n.the
casefrom
aninitial
unloaded conditionto
amaximum
forward
leaning
load is
considered.Only
the
forces
andmomentsin
the
sagittalplane areevaluated.Only
the
forces
and moments appliedto the
boot frame
or outer structure areevaluated.
Bending
moments onthe
tibia,
forces
atthe
boot
toe,
andforces
underthe
ball
ofthe
foot
are not considered.The
boot
soleis
arigid
structure.The
boot
pivots aboutthe
toe,
andtherefore
has
noreactionforces
but
has
amoment.
The
boot
materials,
a plasticshell andfoam inner
boot,
are ahomogeneous
compositestructure
that
is isotropic
andfollows
the
materialpropertiesofthe
shell.Stiffness
Discontinuity
The
intention is
to
determine
the
heel
force,
Fheel-
Two
conditions needto
be
consideredwhen
determining
this
heel force
profile.The
first
condition occurs whilethe
shaftof
the
boot is
stillflexing
androtating
aboutthe
pivot pinsconnecting
the
upperandlower
plastic shells.The
second occurswhilethe
shafthas
reachedits
maximumforward
angular
displacement,
orhard
stop,
but
anincreasing
input force is
stillbeing
applied.These
two
separate conditions resultin
a stiffnessdiscontinuity.
In
the
first
condition, the
boot
stiffness canbe
approximatedby
the
hysteresis
relationship
between
the
bending
moment andangulardisplacement
that
wasdescribed in
Chapter 1
.Using
information from
the
hysteresis
curves publishedby
various researchers(ISO/TC83/SC3/WG14
1983-1993;
Shealy
andEttlinger
1987;
Walkhoff
andBaumann
1987;
Bonjour
andDelouche
1989),
the
boot
stiffness was chosento
be
modeled as anonlinear
torsional
spring1
of stiffness
Kq. Figure 3.1
re-illustratesthis condition,
in
whicha
boot
is flexed forward
andbackward
by
either ahuman
foot
or prosthesis.During
this
flexing
motion, the
input force from
the tester
is
not applied at a pointbeyond
the
forward
or
backward hard
stops.1
A
torsionalspring behaves
suchthat
an angulardeflection,
a,
[degrees
orradians]
will produce a changein torque,
x,
[Nm]
that
is
proportionalto
the spring'sstiffness,
k,
[Nm/degrees
orNm,
respectively].
This relationship
canbe
representedas:x=
k
a,
for
alinear
spring,
or x=k
ctv
Figure
3.1
Typical
Bending
Moment
-Angular
Displacement Response
Curve
Moment
[Nm]
P^nax,
backwardO^niax,
forwarda
[degrees]
If
the
input
force
is
continuously
appliedin
aforward
direction
afterreaching
the
hard
stop,
it is
obviousthat the
responsecurvewouldfollow
the
asymptote atow,
forward ,and
the
bending
momentis
nolonger
afunction
of angulardisplacement.
At
this point,
the
discontinuity
in
the
boot
stiffness occurs.The
stiffness can nolonger be determined
from
the
bending
moment-angular
displacement
relationship.This
scenariodescribes
the
situation of
the
second condition.In
the
second condition uponreaching
the
hard
stop position,
the
entireboot is
assumed
to
actlike
arigid
structure.The
shaft andlower
portionofthe
boot
move as oneunit
pivoting
aboutthe toe.
Thus,
any
appliedforce is
transferred
directly
into
the
bending
moment,
andlike-
wisethe
heel
force,
withoutany
ofthe
energy
attenuationthat
occurredwhen
the
shaftwasrotating
forward.
Because
ofthis
stiffnessdiscontinuity,
the
model must considerboth
conditions.
It
should
be
notedthat
the
second state requiresinformation
aboutthe
final
conditions ofthe
Model Parameters
where
for
t
>t0
F
__Applied
Skier's
Force
H
=Contact Point
ofBoot Heel
to
Binding
Ko
__Absolute Boot Stiffness
observedduring
shaftflexing
k
sAllows for
binding
retentionLi
=Boot
Sole
Length
L2
=Local
Variable
L3
=Functional
Boot Height
P
_=Pivot
point ofboot
shaftT
=Pivot
point atboot
toe
a =
Relative
Shaft Flex Angle
=0
-\\i.(Reference
in diagram
assumes \j/=0.)
(3
=Local
Variable
(j>0
sInitial
Forward Lean Angle
0
=Absolute
Shaft Flex
Angle,
independent
generalized coordinatev|/ =
Boot
Sole
Angle,
independent
generalized coordinateFigure 3.2 Dynamic Model
for
the
Boot
The
input
orSkier's
Force,
F
=F(t),
is
applied as a single pointloading
atthe
The Functional Boot
Height, L3,
is
an assumedlocation
for
the
concentration ofthe
input
force.
This
location has been designated
asthe
top
ofthe
plastic shellfor
arearentry
boot
orthe
middle ofthe
top
buckle
on afront
entry
boot.
Note
that this
location
for
the
front entry boot is
contrary
to the
pressureprofilesfound
by
Schaff, Schattner,
andHauser
(1987).
The Initial Forward Lean
Angle,
0
,is
the
angleformed
by
the
centerline ofthe
boot
shaft and a vertical axis perpendicularto the
boot
sole whenthe
boot is in
the
unloaded condition.
This
point correspondsto the
originin Figure 3.1.
The
values usedin
the
model weredetermined
by
visualinspection
ofthe test
boots.
It
shouldbe
notedthat this
choicein
valueis
only
an assumptionmadeby
the
author.As
has
been
statedby
the
ISO group
(1985),
the
actual value ofthis
"neutral" angleis imprecise due
to the
hysteresis
effect ofthe
prosthesis/boot system.They
found
that the
range couldbe
aslarge
as 8for
rearentry
boots
and1
1for
traditional
boots.
The Boot Sole
Angle,
\|/ =\|/(t),
measuresthe
"theoretical" amount of global angulardisplacement
that the
boot
sole experiencesfrom
the
horizontal
groundplane,
ortop
surface ofthe
ski.This
valueis
theoretical
because in
reality,
the
boot
soleis
retainedparallel
to the
skiby
the
heel
binding during
normalskiing
conditions.However,
in
orderto
predictthe
heel
force,
alinear spring
ofstiffness,
k,
is
usedto
approximate
the
binding
retentioneffect and
thus
ameasurement ofdeflection
is
necessary.The Absolute Shaft Flex
Angle,
0
=0(t),
measuresthe
amount of global angularThis
statement
meansthat
0
always measuresthe
absolutedisplacement
ofthe
centerlineof
the
boot
shaftfrom
a constant reference axisthat
is
relativeto the
ground.This
axisis
the
onedefined
by
the
angle0.
The Relative Shaft
Flex
Angle,
a,
representsthe
amount oflocal
angulardisplacement
ofthe
boot
shaft relativeto the
boot
base,
whichflexes
with\\r.This
a