Ultrasound Open Platforms for Next-Generation Imaging Technique Development
Full text
Figure
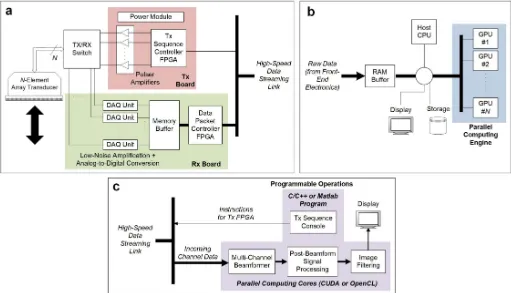
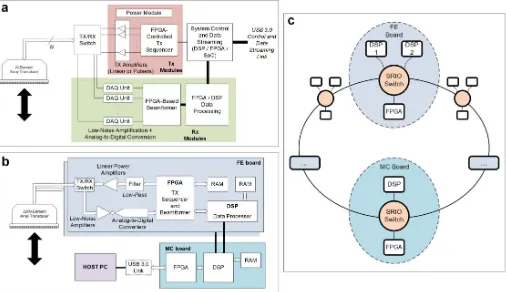
![Fig. 1.Photographs of three different ultrasound OPs. (a) SARUS developed at the Technical University of Denmark [20], [50]](https://thumb-us.123doks.com/thumbv2/123dok_us/1911106.149650/3.612.49.563.372.626/photographs-different-ultrasound-sarus-developed-technical-university-denmark.webp)

Related documents
lijeka“ U slu č aju da i unato č stru č nom mišljenju pripadaju ć ih specijalista postoje nejasno ć e, povjerenstvo za lijekove „može zatražiti dodatno mišljenje stru č
Consequently, a micro-management approach was used to gain the operational level progress visibility, which negatively affected the offshore team members’ trust
Automatic Strainer Sizing Information, Automatic Strainer Sample Specifications, Automatic Strainer Application Worksheet, Fabricated Strainer Application Worksheet, Technical
Suppose that the firm can not observe the motivation of the applicants, but applicants can credibly signal their type to the firm. 15 Obviously, when the firm does not commit to
City of London | Community Energy Action Plan (2014 – 2018) 6 The current low costs for natural gas, used for space heating and water heating, slows down the payback rate for some
A superelement takes into account the relatively high axial stiffnesses of KK- joints in case of balanced loading or of YY-joints with obstructed ovalisation (see Figure 6b/ and
GEOPROBE DRILLING Brad Kirckof Project Manager/ Geoprobe Specialist 320-335-1270 bradk@trautcompanies.com 320-251-5090 800-728-5091 PO Box 547 141 28th Avenue South Waite Park,
American Diabetes Association; CI, confidence interval; D-CLIP, Diabetes Community Lifestyle Improvement Program; DE-PLAN, Diabetes in Europe—Prevention using Lifestyle,
