This is a repository copy of Relationships between the nonlinear output frequency response functions of multi- degree-of-freedom nonlinear systems.
White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/74584/
Monograph:
Peng, Z.K., Lang, Z.Q. and Billings, S.A. (2006) Relationships between the nonlinear output frequency response functions of multi- degree-of-freedom nonlinear systems. Research Report. ACSE Research Report no. 929 . Automatic Control and Systems Engineering, University of Sheffield
[email protected] https://eprints.whiterose.ac.uk/
Reuse
Unless indicated otherwise, fulltext items are protected by copyright with all rights reserved. The copyright exception in section 29 of the Copyright, Designs and Patents Act 1988 allows the making of a single copy solely for the purpose of non-commercial research or private study within the limits of fair dealing. The publisher or other rights-holder may allow further reproduction and re-use of this version - refer to the White Rose Research Online record for this item. Where records identify the publisher as the copyright holder, users can verify any specific terms of use on the publisher’s website.
Takedown
If you consider content in White Rose Research Online to be in breach of UK law, please notify us by
Relationships between the Nonlinear Output
Frequency Response Functions of
Multi-Degree-of-Freedom Nonlinear Systems
Z K Peng, Z Q Lang, and S A Billings
Department of Automatic Control and Systems Engineering The University of Sheffield
Mappin Street, Sheffield S1 3JD, UK
Relationships between the Nonlinear Output
Frequency Response Functions of
Multi-Degree-of-Freedom Nonlinear Systems
Z.K. Peng, Z.Q. Lang, and S. A. Billings
Department of Automatic Control and Systems Engineering, University of Sheffield Mappin Street, Sheffield, S1 3JD, UK
Email: [email protected]; [email protected]; [email protected]
Abstract: Nonlinear Output Frequency Response Functions (NOFRFs) are a new concept proposed by the authors for the analysis of nonlinear systems in the frequency domain. The present study is concerned with investigating inherent relationships between the NOFRFs of two masses in nonlinear MDOF systems. The results reveal very important properties of a class of nonlinear systems, and have considerable significance for the application of the NOFRF concept in engineering practices.
1 Introduction
Linear systems, which have been widely studied by practitioners in many different fields, have provided a basis for the development of the majority of control system synthesis, mechanical system analysis and design, and signal processing methods. However, there are many qualitative behaviors in engineering, such as the generation of harmonics and inter-modulations, which cannot be produced by linear models [1]. In these cases, nonlinear models are needed to describe the system, and nonlinear system analysis methods have to be applied to investigate the system dynamics.
Recently, the novel concept known as Nonlinear Output Frequency Response Functions (NOFRFs) was proposed by the authors T[9]. The concept can be considered to be an alternative Textension of the FRF to the nonlinear case. TNOFRFs are one dimensional functions of frequency, which allow the analysis of nonlinear systems in the frequency domain to be implemented in a manner similar to the analysis of linear systems and which provide great insight into the mechanisms which dominate important nonlinear behaviours.T
Based on the GFRFs for MIMO system achieved in [2][10], most recently, the authors also extended the concept of NOFRFs for the MIMO Volterra nonlinear systems [11]. Although great efforts have been made to analyze nonlinear systems in the frequency domain, most studies, including both numerical and experimental studies, have tended to focus on nonlinear systems with a single degree of freedom.
In engineering practice, many mechanical and structural systems require more than one coordinates to describe the system behaviours. This implies a MDOF model is often needed to describe such systems. In addition, these systems may also behave nonlinearly due to nonlinear characteristics of some components within the systems. For example, a beam with breathing cracks behaves nonlinearly only because of the cracked elements inside the beam [12]. These nonlinear MDOF systems can be regarded as locally nonlinear MDOF systems. The present study is concerned with derivation of the inherent relationships between the NOFRFs of any two masses in locally nonlinear MDOF systems. The results reveal the important properties of nonlinear MDOF systems and have considerable significance for the application of the NOFRF concept in engineering practices.
2. Nonlinear Output Frequency Response Function
2.1 Nonlinear Output Frequency Response Functions under General Input T
The definition of NOFRFs is based on the Volterra series theory of nonlinear systems. The Volterra series extends the well-known convolution integral description for linear systems to a series of multi-dimensional convolution integrals, which can be used to represent a wide class of nonlinear systems [3].
Consider the class of nonlinear systems which are stable at zero equilibrium and which can be described in the neighbourhood of the equilibrium by the Volterra series
i n
i
i n
N n
n u t d
h t
y( ) (τ ,...,τ ) ( τ ) τ
1 1
1
∏
∑∫ ∫
= =
∞ ∞ −
∞ ∞
− −
where y(t) and u(t) are the output and input of the system, hn(τ1,...,τn) is the nth order Volterra kernel, and N denotes the maximum order of the system nonlinearity. Lang and Billings [3] derived an expression for the output frequency response of this class of nonlinear systems to a general input. The result is
⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧
=
∀ =
∫
∏
∑
= +
+ =
− =
ω ω ω
ω σ ω ω
ω π
ω
ω ω
ω
n 1
n n
1 i
i n
1 n 1
n n
N 1 n
n
d j U j
j H 2
n 1 j
Y
j Y j
Y
,...,
) ( ) ,..., ( )
( ) (
for
) ( )
(
(2)
This expression reveals how nonlinear mechanisms operate on the input spectra to produce the system output frequency response. In (2), Y(jω) is the spectrum of the system output, Yn(jω) represents the nth order output frequency response of the system,
n j
n n
n
n j j h e d d
H ( ω ,..., ω ) ... (τ ,...,τ ) ωτ ωnτn τ ... τ
1 ) ,..., ( 1
1
1
1 + +
− ∞
∞ − ∞
∞ −
∫
∫
= (3)
is the nth order Generalised Frequency Response Function (GFRF) [3], and
∫
∏
= +
+ ω ω =
ω
ω
σ ω ω
ω
n
n n
i
i n
n j j U j d
H
,..., 1
1
1
) ( ) ,..., (
denotes the integration of
∏
=
n i
i n
n j j U j
H
1
1,..., ) ( )
( ω ω ω over the n-dimensional hyper-plane
ω ω
ω1+L+ n = . Equation (2) is a natural extension of the well-known linear relationship )
( ) ( )
(jω H jωU jω
Y = , where H(jω) is the frequency response function, to the
nonlinear case.
For linear systems, the possible output frequencies are the same as the frequencies in the input. For nonlinear systems described by equation (1), however, the relationship between the input and output frequencies is more complicated. Given the frequency range of an input, the output frequencies of system (1) can be determined using the explicit expression derived by Lang and Billings in [3].
Based on the above results for the output frequency response of nonlinear systems, a new concept known as the Nonlinear Output Frequency Response Function (NOFRF) was recently introduced by Lang and Billings [9]. The NOFRF is defined as
∫ ∏
∫
∏
= + + = =
+
+ =
=
ω ω ω
ω ω
ω ω
ω
σ ω
σ ω ω
ω ω
n n
n n
i
i
n n
i
i n
n n
d j U
d j U j
j H
j G
,..., 1
,..., 1
1
1 1
) (
) ( ) ,..., (
)
( (4)
under the condition that
0 )
( )
(
,..., 1
1
≠
=
∫ ∏
= + + ω ω =
ω
ω
σ ω ω
n
n n
i
i
n j U j d
Notice that Gn(jω) is valid over the frequency range of Un(jω) , which can be determined using the algorithm in [3].
By introducing the NOFRFs Gn(jω), n=1,LN, equation (2) can be written as
∑
∑
= =
=
= N
n
n n
N n
n j G j U j
Y j
Y
1 1
) ( ) ( )
( )
( ω ω ω ω (6)
which is similar to the description of the output frequency response for linear systems. The NOFRFs reflect a combined contribution of the system and the input to the system output frequency response behaviour. It can be seen from equation (4) that Gn(jω) depends not only on Hn (n=1,…,N) but also on the input U(jω). For a nonlinear system, the dynamical properties are determined by the GFRFs Hn (n= 1,…,N). However, from equation (3) it can be seen that the GFRF is multidimensional [7][8], which can make the GFRFs difficult to measure, display and interpret in practice. According to equation (4), the NOFRF Gn(jω) is a weighted sum of Hn(jω1,...,jωn) over ω1+L+ωn =ω with the weights depending on the test input. Therefore Gn(jω) can be used as an alternative representation of the dynamical properties described by Hn . The most important property of the NOFRF Gn(jω) is that it is one dimensional, and thus allows the analysis of nonlinear systems to be implemented in a convenient manner similar to the analysis of linear systems. Moreover, there is an effective algorithm [9] available which allows the estimation of the NOFRFs to be implemented directly using system input output data. 2.2 Nonlinear Output Frequency Response Functions under Harmonic Inputs
When system (1) is subject to a harmonic input ) cos(
)
(t = A ω t+β
u F (7) Lang and Billings [3] showed that equation (1) can be expressed as
∑
∑
∑
= + + =
= ⎟
⎟ ⎠ ⎞ ⎜
⎜ ⎝ ⎛ =
= N
n
k k
k k
n n
N n
n
kn k
n
n A j A j
j j
H j
Y j
Y
1
1 1
1
1, , ) ( ) ( )
( 2
1 )
( )
(
ω ω ω
ω ω
ω ω
ω ω
L
L
L (8)
where
⎩ ⎨ ⎧ =
0 | | ) (
) ( sign β ωk A ej k
j A
i
if
{
}
otherwise
, , 1 , 1
,k i n
k F
ki ∈ ω =± = L ω
(9)
Define the frequency components of the nth order output of the system as Ωn, then according to equation (8), the frequency components in the system output can be expressed as
U
Nn n
1
=
Ω =
where Ωn is determined by the set of frequencies
{
ω=ωk1+L+ωkn |ωki =±ωF,i=1,L,n}
(11)From equation (11), it is known that if all
n
k k ω
ω , ,
1 L are taken as −ωF, then ω=−nωF.
If k of these are taken as ωF, then ω =(−n+2k)ωF. The maximal k is n. Therefore the
possible frequency components of Yn(jω) are
n
Ω =
{
(−n+2k)ωF,k =0,1,L,n}
(12)Moreover, it is easy to deduce that
} , , 1 , 0 , 1 , , ,
{ 1
N N
k
k F
N n
n L L
U
Ω = =− −= Ω
=
ω (13)
Equation (13) explains why superharmonic components are generated when a nonlinear system is subjected to a harmonic excitation. In the following, only those components with positive frequencies will be considered.
The NOFRFs defined in equation (4) can be extended to the case of harmonic inputs as
∑
∑
= + + = + +
=
ω ω ω ω ω ω
ω ω
ω ω
ω ω
ω
kn k
n kn
k
n n
k k
n
k k
k k
n n
H n
j A j
A
j A j
A j j
H
j G
L L
L
L L
1
1 1
1 1
) ( ) ( 2
1
) ( ) ( ) , , ( 2
1
)
( n = 1,…, N (14)
under the condition that
0 ) ( ) ( 2
1 ) (
1
1 ≠
=
∑
= + + ω ω ω
ω ω
ω
kn k
n
k k
n
n j A j A j
A
L
L (15)
Obviously, )GnH(jω is only valid over Ωn defined by equation (12). Consequently, the
output spectrum Y(jω) of nonlinear systems under a harmonic input can be expressed as
∑
∑
= =
=
= N
n
n H
n N
n
n j G j A j
Y j
Y
1 1
) ( ) ( )
( )
( ω ω ω ω (16)
When k of the n frequencies of
n
k k ω
ω , ,
1 L are taken as ωF and the remainders are as
F
ω
− , substituting equation (9) into equation (15) yields,
β
ω ( 2 ) |
| 2
1 ) ) 2 (
( F n n j n k
n j n k A e
A − + = − + (17)
Thus )GnH(jω becomes
β
β
ω ω
ω ω
ω
) 2 (
) 2 (
| | 2
1
| | ) , , ,
, , ( 2
1 ) ) 2 ( (
k n j n n
k n j n k
n
F F
k F F
n n F H
n
e A
e A j
j j
j H k
n j G
+ −
+ − −
− −
= +
−
4 4 8 4
4 7 6
L 4
48 4
47 6
L
) , , ,
, , (
4 4 8 4
4 7 6
L 4
48 4 47 6
L
k n
F F
k F F
n j j j j
H
−
− −
where Hn(jω1,...,jωn) is assumed to be a symmetric function. Therefore, in this case, )
(jω
GnH over the nth order output frequency range Ωn=
{
(−n+2k)ωF,k =0,1,L,n}
is equal to the GFRFHn(jω1,...,jωn) evaluated atω1 =L=ωk =ωF, ωk+1 =L=ωn =−ωF,n
k=0,L, .
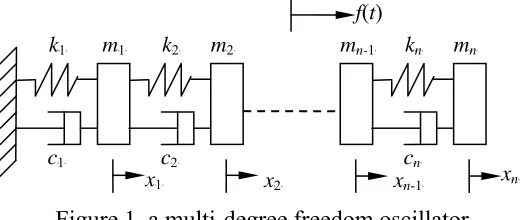
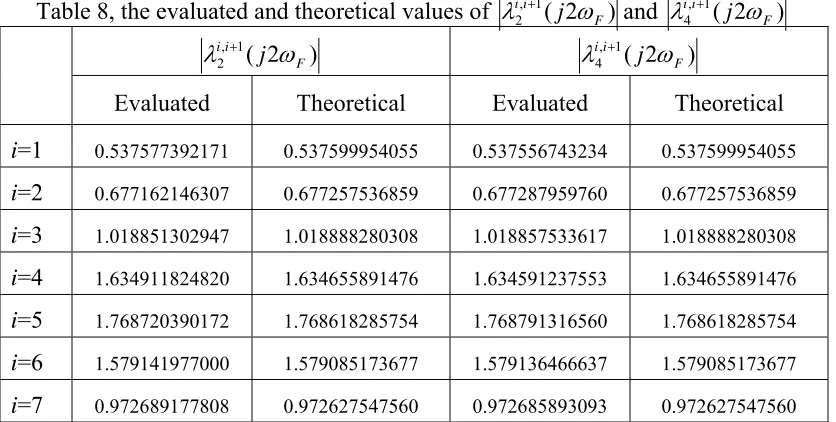
[image:8.612.175.441.211.321.2]3. Analysis of Nonlinear MDOF Systems Using the NOFRFs
3.1 Locally Nonlinear MDOF SystemFigure 1, a multi-degree freedom oscillator
The considered multi-degree-of-freedom oscillator is shown as Figure 1, the input force is added on the Jth mass.
If all springs and damping are linear, then the governing motion equation of the MDOF oscillator in Figure 1 can be written as
) (t F Kx x C x
M&&+ &+ = (19) where
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
n
m m
m
M
L M O M M
L L
0 0
0 0
0 0
2 1
is the system mass matrix, and
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
−
− + −
− + −
− +
=
− −
n n
n n n n
c c
c c c c
c c c c
c c
c
C
0 0
0 0
0 0
1 1 3 3 2 2
2 2
1
L O M
O O
O
M O
L
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
−
− + −
− + −
− +
=
− −
n n
n n n n
k k
k k k k
k k k k
k k
k
K
0 0
0 0
0 0
1 1 3 3 2 2
2 2
1
L O M
O O
O
M O
L
are the system damping and stiffness matrix respectively. x=(x1,L,xn)' is the displacement vector, and
' 1
) 0 , , 0 ), ( , 0 , , 0 ( ) (
8 7 6
L 8
7 6
L
J n J
t f t
F
− −
=
is the external force vector acting on the oscillator.
mBnB
kBnB
mBn-1B
mB2B
mB1B kB2B
kB1B
xB1B xB2B xBn-1B
xBnB
f(t)
cB
1B cB
Equation (19) is the basis of the modal analysis method, which is a well-established approach for determining dynamic characteristics of engineering structures. In the linear case, the displacements xi(t) (i=1,L,n) can be expressed as
∫
−+∞∞ −= h t τ f τ dτ
t
xi( ) (i)( ) ( ) (20) where )h(i)(t (i=1,L,n) are the impulse response functions that are determined by equation (19), and the Fourier transform of h(i)(t)is the well-known FRF.
Assuming the component between the Lth and (L-1)th masses has a nonlinear stiffness and damping, and the restoring forces SLS(∆) and SLD(∆&) are the polynomial functions of the deformation and its derivative ∆& respectively, i.e.,
∑
=∆ =
∆ P
i i i LS r
S
1 )
( ,
∑
=
∆ =
∆ P
i i i LD w
S
1 )
(& & (21)
where P is the degree of the polynomial. Without loss of generality, assume L≠1,n and
J
L< , kL =r1 and cL =w1. Then the motion of the oscillator in Figure 1 is determined by equations (22)~(28) in the following.
For the masses that are not connected to the Lth spring, the governing motion equations are
0 )
( )
( 1 2 1 2 2 1 2 1 2 2
1
1x + c +c x −c x + k +k x −k x =
m&& & & (22) 0
) (
)
( + 1 − 1− 1 1+ + 1 − 1− 1 1 =
+ i i+ i i i− i+ i+ i i+ i i i− i+ i+ i
ix c c x cx c x k k x k x k x
m&& & & &
(i≠L−1,L,J) (23) )
( )
( )
(c c 1 x c x 1 c 1x 1 k k 1 x k x 1 k 1x 1 f t
x
mJ&&J + J + J+ &J − J&J− − J+ &J+ + J + J+ J − J J− − J+ J+ = (24) 0
1
1+ − =
−
+ n n n n− n n n n−
n
nx c x c x k x k x
m && & & (25) For the mass that is connected to the left of the Lth spring, the governing motion equation is
0 ) (
) (
) (
) (
2
1 2
1 2
1
1 1
2 1 1 1
1 1
= − +
− +
− −
+ + −
− +
+
∑
∑
= −
= −
− −
− −
− − − −
− −
P i
i L L i P
i
i L L i L L L L
L L L L L L L L L L L L
x x w x
x r x
c x c
x c c x k x k x k k x m
& & &
&
& &
&
(26)
For the mass that is connected to the right of the Lth spring, the governing motion equation is
0 ) (
) (
) (
) (
2
1 2
1 1
1 1
1 1
1 1 1
= − −
− −
− −
+ + −
− +
+
∑
∑
= −
= −
+ + −
+ +
+ − +
P i
i L L i P
i
i L L i L
L L L
L L L L L L L L L L L L
x x w x
x r x
c x c
x c c x k x k x k k x m
& & &
&
& &
&
(27)
Denote
∑
∑
= −
= −
− +
−
= P
i
i L L i P
i
i L L
i x x r x x
w NonF
2 1 2
1 ) ( )
(& & (28)
(
)
'0 0
0
0 L NonF NonF L
NF = − (29)
Then, equation (22)~(27) can be rewritten in a matrix form as ) (t F NF Kx
x C x
The system described by equations (28)~(30) is a typical locally nonlinear MDOF system. The Lth nonlinear component can lead the whole system to behave nonlinearly. In this case, the Volterra series can be used to describe the relationships between the displacements )xi(t (i=1,L,n) and the input force f(t) as below
i j
i
i N
j
j j
i
i t h f t d
x ( ) (τ ,...,τ ) ( τ ) τ
1 1
1 ) ,
(
∏
∑∫ ∫
= =
∞ ∞ −
∞ ∞
− −
= L (31)
under quite general conditions [3]. In equation (31), h(i,j)(τ1,...,τj) , ( i=1,L,n ,
N
j=1,L, ), represents the jth order Volterra kernel for the relationship between f(t) and the displacement of mBiB. The Fourier Transform of ( ,..., )
1 ) ,
(i j j
h τ τ is the corresponding GFRF )H(i,j)(jω1,...,jωj (i=1,L,n, j=1,L,N).
3.2 GFRFs of the Locally Nonlinear MDOF System
From equations (22)~(27), the GFRFs H(i,j)(jω1,...,jωj), (i=1,L,n, j=1,L,N) can be determined using the harmonic probing method [5][6].
First consider the input f(t) is of a single harmonic
t j
e t
f( )= ω (32) Substituting (30) and
t j i
i t H j e
x ( )= (,1)( ω) ω (i=1,L,n) (33) into equations (22)~(27) and extracting the coefficients of ejωt yields, for the first and nth masses,
(
−m1ω2+ j(c1+c2)ω+(k1+k2))
H(1,1)(jω)−(
jc2ω+k2)
H(2,1)(jω)=0 (34)(
)
( ,1)( )(
)
( 1,1)( ) 02+ + − + =
−mnω jcnω kn Hn jω jcnω kn H n− jω (35)
for other masses excluding the Jth mass
(
−miω2 + j(ci +ci+1)ω+ki+ki+1)
H(i,1)(jω)−(
jciω+ki)
H(i−1,1)(jω)(
1 + 1)
( 1,1)( )=0− jci+ω ki+ H i+ jω (i≠1,J,n) (36) for the Jth mass
(
−mJω2 + j(cJ +cJ+1)ω+kJ +kJ+1)
H(J,1)(jω)−(
jcJω+kJ)
H(J−1,1)(jω)(
1 + 1)
( 1,1)( )=1− jcJ+ω kJ+ H J+ jω (37) Equations (34)~(37) can be written in a matrix form as
(
)
} } TJ n J
j H K jC
M ( ) (0 0 1 0 0)
1
1 2
− −
= +
+
− ω ω ω L L (38)
where
(
)
Tn j
H j
H j
H1( ω)= (1,1)( ω) L ( ,1)( ω) (39) From equation (39), it is known that
(
)
} } TJ n J
K jC M
j
H ( ) (0 0 1 0 0)
1 1 2
1
− −
−
+ +
−
= ω ω L L
Denote
K jC M
j =− + +
Θ ω ω2 ω
)
( (41) and ⎟ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎜ ⎝ ⎛ = Θ− ) ( ) ( ) ( ) ( ) ( ) , ( ) 1 , ( ) , 1 ( ) 1 , 1 ( 1 ω ω ω ω ω j Q j Q j Q j Q j n n n n L M O M L (42)
It is obtained from equations (40)~(42) that
) ( ) ( (, ) ) 1 ,
( jω Q jω
H i = iJ (i=1,L,n) (43)
Thus, for any two consecutive masses, the relationship between the first order GFRFs can be expressed as
) ( ) ( ) ( ) ( )
( , 1
1 ) , 1 ( ) , ( ) 1 , 1 ( ) 1 ,
( λ ω
ω ω ω ω + + + =
= ii
J i J i i i j Q j Q j H j H
(i=1,L,n−1) (44)
The above procedure used to analyze the relationships between the first order GFRFs can be extended to investigate the relationship between the Nth order GFRFs with N ≥2. To achieve this, consider the input
∑
= = N k t j k e t f 1 )( ω (45)
Substituting (45) and
L L L L L + + + + + = + + t j N N i t j N i t j i i N N e j j H N e j H e j H t x ) ( 1 ) , ( ) 1 , ( 1 ) 1 , ( 1 1 ) , , ( ! ) ( ) ( ) ( ω ω ω ω ω ω ω ω
(i=1,L,n) (46)
into equations (22)~(27) and extracting the coefficients of ej(ω1+L+ωN)t yield
(
)
(
( ))
( , , ) 0) , , ( ) ( ) )( ( ) ( 1 ) , 2 ( 2 1 2 1 ) , 1 ( 2 1 1 2 1 2 1 1 = + + + − + + + + + + + + − N N N N N N N j j H k jc j j H k k c c j m ω ω ω ω ω ω ω ω ω ω L L L L L (47)
(
)
(
( ))
( , , ) 0) , , ( ) ( ) ( 1 ) , 1 ( 1 1 ) , ( 1 2 1 = + + + − + + + + + + −
− N N
n n N n N N n n N n N n j j H k jc j j H k jc m ω ω ω ω ω ω ω ω ω ω L L L L L (48)
(
)
(
( ))
( , , ) ) , , ( ) )( ( ) ( 1 ) , 1 ( 1 1 ) , ( 1 1 1 2 1 N N i i N i N N i i i N i i N i j j H k jc j j H k k c c j m ω ω ω ω ω ω ω ω ω ω L L L L L − + + + + + − + + + + + + + + −(
( ))
( 1, , ) 0) , 1 ( 1 1
1 + + + =
− jci+ ω L ωN ki+ H i+ N jω L jωN (i≠1,L−1,L,n) (49)
(
)
(
( ))
( , , ) ) , , ( ) )( ( ) ( 1 ) , 2 ( 1 1 1 1 ) , 1 ( 1 1 1 2 1 1 N N L L N L N N L L L N L L N L j j H k jc j j H k k c c j m ω ω ω ω ω ω ω ω ω ω L L L L L − − − − − − − + + + − + + + + + + + + −(
( ))
( 1, , ) 1, ( 1, , ) 0) , (
1+ + + +Λ =
− − N L L N N N L L N
L k H j j j j
jc ω L ω ω L ω ω L ω (50)
(
( ))
( 1, , ) 1, ( 1, , ) 0 ) , 1 ( 1 11 + + + −Λ =
− − + + + N L L N N N L L N
L k H j j j j
jc ω L ω ω L ω ω L ω (51)
In equations (50) and (51), ΛLN−1,L(jω1,L, jωN) represents the extra terms introduced by
∑
∑
= − = − − + − = P i i L L i P i i L Li x x r x x
w NonF
2 1 2
1 ) ( )
(& & for the N th order GFRFs, for example, for the second order GFRFs,
(
)
(
)
) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) , ( 1 ) 1 , ( 2 ) 1 , 1 ( 2 ) 1 , ( 1 ) 1 , 1 ( 2 ) 1 , ( 1 ) 1 , ( 2 ) 1 , 1 ( 1 ) 1 , 1 ( 2 2 1 2 2 1 , 1 2 ω ω ω ω ω ω ω ω ω ω ω ω j H j H j H j H j H j H j H j H r w j j L L L L L L L L L L − − − − − − − + + − = Λ (52) Denote(
)
TN N n N N N
N j j H j j H j j
H ( , , ) ( , , ) ( 1, , )
) , ( 1 ) , 1 (
1 ω ω ω ω ω
ω L = L L L (53)
and } } ′ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ Λ − Λ = Λ − − −
− n L
N L L N N L L N L N
N(j , , j ) 0 0 (j , , j ) (j 1, ,j ) 0 0 , 1 1 , 1 2
1 L ω L ω L ω ω L ω L
ω (54)
then equations (47)~(51) can be written in a matrix form as
) , , ( ) , , ( )) (
(j ω1+L+ωN HN jω1 L jωN =ΛN jω1 L jωN
Θ (55)
so that ) , , ( )) ( ( ) , ,
( 1 N 1 1 N N 1 N
N j j j j j
H ω L ω =Θ− ω +L+ω Λ ω L ω (56)
Therefore, for each mass, the Nth order GFRF can be calculated as
(
)
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ Λ − Λ + + + + = − − − ) , , ( ) , , ( ) ( ( )), ( ( ) , , ( 1 , 1 1 , 1 1 , 1 1 , 1 ) , ( N L L N N L L N N L i N L i N N i j j j j j Q j Q j j H ω ω ω ω ω ω ω ω ω ω L L L L L ) , , 1(i= L n (57) Consequently, for two consecutive masses, the N th order GFRFs have the following relationships )) ( ( )) ( ( )) ( ( )) ( ( ) , , ( ) , , ( 1 , 1 1 1 , 1 1 , 1 1 , 1 ) , 1 ( 1 ) , ( N L i N L i N L i N L i N N i N N i j Q j Q j Q j Q j j H j j H ω ω ω ω ω ω ω ω ω ω ω ω + + − + + + + − + + = + − + −
+ L L
L L L L ) ( )) (
( , 1 1
1 1 , N i i N N i i j
Q ω + +ω =λ ω + +ω
= + +
L
L (i=1,L,n−1) (58)
Equations (44) and (58) give a comprehensive description for the relationships between the GFRFs of any two consecutive masses for the nonlinear MDOF system (30).
(
)
(
)
(
)
⎥⎥⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + − + + + − + + + + + + − + + + = = + + 2 1 1 2 1 1 1 , 0 1 2 1 1 1 , 0 2 1 2 1 ) , 2 ( 1 ) , 1 ( 1 2 , 1 ) ( ) ( 1 ) ( ) ( 1 ) ( ) , , ( ) , , ( ) ( N N N N N N N N N N N N N m k k c c j k jc j j H j j H ω ω ω ω λ ω ω ω ω λ ω ω ω ω ω ω ω ω λ L L L L L L L L(N =1,L,N) (59) Starting with equation (59), and iteratively using equations (36) and (49) from the 1P
st
P mass until i=(L-2), it can be deduce that, for the masses on the left of the nonlinear spring excluding the (L-1)th mass, the following relationships exist for the system GFRFs
(
)
(
)
(
)
⎥⎥⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + − + + + − + + + + + + − + + + = = + + + − + − + + + + 2 1 1 1 , 1 1 1 1 , 1 1 1 1 1 ) , 1 ( 1 ) , ( 1 1 , ) ( ) ( 1 ) ( ) ( 1 ) ( ) , , ( ) , , ( ) ( N i i i N i i N N i i N i i N i N i N N i N N i N i i N m k k c c j k jc j j H j j H ω ω ω ω λ ω ω ω ω λ ω ω ω ω ω ω ω ω λ L L L L L L L L(1<i≤L−2, N =1,L,N) (60) Denote +1, ( 1+ + )=1
N n
n
N ω ω
λ L , (N =1,L,N), cn+1 =0 and kn+1 =0. Then, for the last two masses, from equations (35) and (48) it is can be deduced that
) ( 1 ) , , ( ) , , ( ) ( 1 , 1 1 ) , 1 ( 1 ) , ( 1 1 , N n n N N N n N N n N n n N j j H j j H ω ω λ ω ω ω ω ω ω λ + + = = + + − − − L L L L
(
)
(
)
(
)
⎥⎥⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + − + + + − + + + + + + − + + + = + + + + 2 1 1 1 , 1 1 1 1 , 1 1 ) ( ) ( 1 ) ( ) ( 1 ) ( N n n n N n n N N n n N n n N n N n m k k c c j k jc ω ω ω ω λ ω ω ω ω λ ω ω L L L L L(N =1,L,N) (61)
Starting with equation (61), and iteratively using equations (36) and (49) from nth mass until i=(J+1), it can be deduced that, for the masses on the right of the Jth mass, the following relationships can be established for the system GFRFs
) ( 1 ) , , ( ) , , ( ) ( 1 , 1 1 ) , 1 ( 1 ) , ( 1 1 , N i i N N N i N N i N i i N j j H j j H ω ω λ ω ω ω ω ω ω λ + + = = + + − − − L L L L
(
)
(
)
(
)
⎥⎥⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + − + + + − + + + + + + − + + + = + + + + 2 1 1 1 , 1 1 1 1 , 1 1 ) ( ) ( 1 ) ( ) ( 1 ) ( N i i i N i i N N i i N i i N i N i m k k c c j k jc ω ω ω ω λ ω ω ω ω λ ω ω L L L L L(J+1≤i≤n, N =1,L,N) (62) For the masses between the (L-1)th and Jth masses, (L≤i≤J ), the relationships between the GFRFs can also be described as equation (62), but a little modifications are required for )λ1J,J−1(ω and λLN,L−1(ω1+L+ωN), (N =1,L,N).
(
)
(
) (
)
[
J J]
J J J J J J J J J J J k k c c j m k jc + − + + − + − + = + + + + − 1 , 1 1 1 , 1 1 2 1 , 1 ) ( 1 ) ( 1 ) ( ω λ ω ω λ ω ω ω
λ (63)
Then, from equation (37), it can be known that, when N =1and i=J, the relationship given in (62) needs to be modified as
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + = = = − − − − − ) ( 1 1 1 ) ( ) ( 1 ) ( ) ( ) ( ) 1 , 1 ( 1 , 1 , 1 1 ) 1 , 1 ( ) 1 , ( 1 ,
1 ω λ ω λ ω ω ω
ω ω λ j H k jc j H j H J J J J J J J J J J
J (64)
Denote
(
)
(
)
(
)
⎥⎥⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + − + + + − + + + + + + − + + + = + + + + + + − 2 1 1 1 , 1 1 1 1 , 1 1 1 1 , ) ( ) ( 1 ) ( ) ( 1 ) ( ) ( N L L L N L L N N L L N L L N L N L N L L N m k k c c j k jc ω ω ω ω λ ω ω ω ω λ ω ω ω ω λ L L L L LL (65)
Then, for the Lth mass, using equation (51), it can be known that, when N ≥2, the relationships given in (62) need to be modified as
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ Λ + + + + + + = + + = = + + − − − − − − ) , , ( ) , , ( ) ( 1 1 ) ( ) ( 1 ) , , ( ) , , ( ) ( 1 ) , 1 ( 1 , 1 1 1 1 , 1 , 1 1 ) , 1 ( 1 ) , ( 1 1 , N N L N L L N L N L N L L N N L L N N N L N N L N L L N j j H j j k jc j j H j j H ω ω ω ω ω ω ω ω λ ω ω λ ω ω ω ω ω ω λ L L L L L L L L
(N ≥2) (66)
Under other occasions, if i=J, N ≠1,and if i=L, N =1, for the masses (L≤i≤J ), the relationships between the GFRFs can be expressed as
) ( 1 ) , , ( ) , , ( ) ( 1 , 1 1 ) , 1 ( 1 ) , ( 1 1 , N i i N N N i N N i N i i N j j H j j H ω ω λ ω ω ω ω ω ω λ + + = = + + − − − L L L L
(
)
(
)
(
)
⎥⎥⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + + − + + + − + + + + + + − + + + = + + + + 2 1 1 1 , 1 1 1 1 , 1 1 ) ( ) ( 1 ) ( ) ( 1 ) ( N i i i N i i N N i i N i i N i N i m k k c c j k jc ω ω ω ω λ ω ω ω ω λ ω ω L L L L L(L≤i≤J, N =1,L,N, and if i=J, N ≠1,and if i=L, N =1) (67) From a different respective, equations (59)~(67) give a comprehensive description for the relationships between the GFRFs of any two consecutive masses for the nonlinear MDOF system (30).
3.3 NOFRFs of the Locally Nonlinear MDOF System
∫ ∏
∫
∏
= + + = = + + = = ω ω ω ω ω ω ω ω σ ω σ ω ω ω ω N N N N q q N N q q N N i N i d j F d j F j j H j G ,..., 1 ,..., 1 1 ) , ( ) , ( 1 1 ) ( ) ( ) ,..., ( ) ( ) 1 , 1( ≤N ≤N ≤i≤n (68) where )F(jω is the Fourier transform of f(t).
According to equation (58), for any N ≥2, equation (68) can be rewritten as
∫ ∏
∫
∏
= + + = = + + + = + + + = ω ω ω ω ω ω ω ω σ ω σ ω ω ω ω ω ω N N N N q q N N q q N N i N i i N i d j F d j F j j H j Q j G ,..., 1 ,..., 1 1 ) , 1 ( 1 1 , ) , ( 1 1 ) ( ) ( ) ,..., ( )) ( ( ) ( L ) ( ) ( ) , 1 ( 1, ω ω
j G
j
Qii+ i+ N
= (2≤N≤N, 1≤i≤n−1) (69) Then for two consecutive masses, the NOFRFs have the following relationships
) ( ) ( ) ( ) ( 1 , 1 , ) , 1 ( ) ,
( ω λ ω
ω
ω + +
+
=
= ii
N i i N i N i j Q j G j G
(2≤N≤N, 1≤i≤n−1) (70)
Similarly, according to equation (44), for N= 1, equation (68) can be rewritten as
) ( ) ( )
( 1, 1 ( 1,1)
) 1 ,
( jω λ ω G jω
Gi = ii+ i+ (1≤i≤n−1) (71) therefore ) ( ) ( ) ( ) ( )
( , 1
1 ) , 1 ( ) , ( ) 1 , 1 ( ) 1 ,
( λ ω
ω ω ω ω + + + =
= ii
J i J i i i j Q j Q j G j G
(1≤i≤n−1) (72)
Equations (70) and (72) give a comprehensive description for the relationships between the NOFRFs of two consecutive masses of the nonlinear MDOF system (30).
The relationships between the NOFRFs of two consecutive masses can also be derived from equations (59)~(67).
From equation (59), it can be known that
(
)
( ) ) ))( ( 1 ( ) ( ) ( 2 , 1 2 2 1 1 1 , 0 2 1 2 2 ) , 2 ( ) , 1( λ ω
ω ω ω λ ω ω ω ω N N N N jc k jc k m k jc j G j G = + + + − + − +
= (1≤N ≤N) (73)
Starting with equation (73), and iteratively using equations (60) and (70) from the 1P
st
P mass until i=(L-2), it can be deduced that, for the masses on the left of the nonlinear spring excluding the (L-1)th mass, the following relationships exists for the NOFRFs.
(
)
(
)
[
1 1]
, 1 2 1 1 ) , 1 ( ) , ( 1 , ) ( 1 ) ( ) ( ) ( + + − + + + + + + + − + − + = = i i i i i i N i i i N i N i i i N k jc k jc j m k jc j G j G j ω ω ω λ ω ω ω ω ω λ
Similarly, for the masses on at the right of the Jth mass, the following relationship about the NOFRFs can be established using equations (62) and (68).
(
)
(
)
[
i i i i]
i i N i i i N i N i i i N i i N k jc k jc j m k jc j G j G j j + + + − + − + = = = + + + − − − ω ω ω λ ω ω ω ω ω λ ω λ 1 1 , 1 2 ) , 1 ( ) , ( , 1 1 , ) ( 1 ) ( ) ( ) ( 1 ) (
(J+1≤i≤n, N =1,L,N) (75) Starting from the Jth mass, it is easily deduced that the NOFRFs of two consecutive masses, which locate between the (L-1)th and Jth masses, have the similar relationships given in equation (75), but a little modifications are required for , 1( )
1 ω
λJJ−
and λLN,L−1(ω), (N =1,L,N)..
From equation (64), it can be known that, when N =1and i=J , the relationship given in equation (75) needs to be modified as
) ( 1 ) ( 1 1 1 ) ( ) ( ) ( )
( 1,
1 ) 1 , 1 ( 1 , 1 ) 1 , 1 ( ) 1 , ( 1 ,
1 ω λ ω ω ω λ ω
ω ω
λ J J
J J J J J J J J J j G k jc j G j G − − − − − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + =
= (76)
Denote
(
)
(
)
[
L L L L]
L L N L L L L L N k jc k jc m k jc + + + − + − + = + + + − ω ω ω λ ω ω ω λ 1 1 , 1 2 1 , ) ( 1 )
( (77)
and
∫ ∏
∫
∏
= + + = = + + = − − Λ = Γ ω ω ω ω ω ω ω ω σ ω σ ω ω ω ω N N N N q q N N q q N L L N N L d j F d j F j j j ,..., 1 ,..., 1 1 , 1 ) , 1 ( 1 1 ) ( ) ( ) , , ( ) ( L(2≤N ≤N) (78)
Then, for the Lth mass, from equations (65) and (66), it can be known that, when N ≥2, the relationship given in (75) needs to be modified as
) ( 1 ) ( ) ( 1 1 ) ( ) ( ) ( )
( 1,
) , 1 ( ) , 1 ( 1 , ) , 1 ( ) , ( 1 , ω λ ω ω ω ω λ ω ω ω λ j j G j k jc j j G j G
j L L
N N L N L L L L L N N L N L L L N − − − − − − = ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ Γ + + = = ) 2
( ≤N ≤N (79) Under other conditions, if i=J, N ≠1,and if i=L, N =1, for the masses (L≤i≤J ), from equation (67), it is known that the relationships between the NOFRFs can be expressed as
(
)
(
)
[
i i i i]
i i N i i i N i N i i i N i i N k jc k jc j m k jc j G j G j j + + + − + − + = = = + + + − − − ω ω ω λ ω ω ω ω ω λ ω λ 1 1 , 1 2 ) , 1 ( ) , ( , 1 1 , ) ( 1 ) ( ) ( ) ( 1 ) (
3.4 The Properties of NOFRFs of Locally Nonlinear Systems
Important properties of the NOFRFs of locally nonlinear MDOF systems can be obtained from equations (70)~(80) as the following
i) For the masses which are on the left of the nonlinear spring or on the right of the input force, below relationships hold.
) (
) ( )
( ) (
) , 1 (
) , (
) 1 , 1 (
) 1 , (
ω ω ω
ω
j G
j G
j G
j G
N i
N i i
i
+ +
=
=L (1≤i≤L−2, J ≤i<n) (81)
that is
) ( )
( )
( , 1 , 1
1 ,
1 ω λ ω λ ω
λ + = = ii+ = ii+
N i
i
L (1≤i≤L−2, J ≤i<n) (82) ii) For the masses located between the nonlinear spring and the input force, the following
relationships hold.
) (
) ( )
( ) ( )
( ) (
) , 1 (
) , (
) 2 , 1 (
) 2 , (
) 1 , 1 (
) 1 , (
ω ω ω
ω ω
ω
j G
j G
j G
j G
j G
j G
N i
N i i
i i
i
+ +
+
= =
≠ L (L−1≤i≤J−1) (83)
that is
) ( )
( )
( 2, 1 , 1
1 ,
1 ω λ ω λ ω
λ + ≠ + = = ii+
N i
i i
i
L (L−1≤i≤J−1) (84) iii) For the masses which are on the left of the nonlinear spring or on the right of the input
force, the following relationships about the output frequency responses hold )
( ) ( )
(jω λ, 1 jω x 1 jω
x i
i i
i +
+
= (1≤i≤L−2, J ≤i<n) (85) The first property is straightforward. For the masses on the left of the nonlinear spring, from equation (73), it can be known that
(
)
(
)
( )) ( )
( 1,2
2 1 2 1 2
1
2 2 2
, 1 2
, 1
1 ω ω λ ω
ω ω
λ ω
λ j
k k c c j m
jc k j
j N =
+ + + +
−
+ =
=
=L (86)
Consequently, substituting (86) into equation (73) yields
(
)
(
) (
)
[
2 3]
2 , 1 3
2 2
, 1 2
2
3 3 3
, 2 3
, 2 1
) ( 1 )
( 1 )
( )
(
k k j c
c j j
m
k jc
N
+ −
+ + −
+ −
+ =
= =
ω λ ω
ω λ ω
ω ω
λ ω
λ L
) ( 3 ,
2 ω
λ j
= (87) Iteratively use the above procedure until i=(L-2), for the masses (1≤i≤L−2) the first property can be proved. Similarly, starting from the nth mass, and iteratively using equation (75) until i=J, the first property for the masses (J ≤i<N) can also be proved. From equation (70), it can be known that, for the masses located between the nonlinear spring and the input force, the following relationship is tenable
) ( 1 )
( )
( )
( ) ( )
( ) (
, 1 1
, 1
,
) , 1 (
) , (
) 2 , 1 (
) 2 , (
ω λ ω λ ω ω
ω ω
ω
j j
j Q j
G j G
j G
j G
i i i
i i
i N
i N i i
i
+ +
+ +
+
= =
= =
=L
According to Property i), it can be known that ) ( 1 ) ( ) ( 1 )
( , 1 1, , 1
1 ,
1
1 ω λ ω λ ω λ ω
λ + +
+ + = = = = J J N J J N J J J J
L (89)
Substituting (89) into λ1, 1(jω)
J J −
, ,λ2J,J−1(ω),L
) ( 1 , ω λJJ−
N , it follows
(
)
(
) (
)
[
J J]
J J J J J J J J J J J N J J J J k k c c j m k jc + − + + − + − + = = = + + + + − − − 1 , 1 1 1 , 1 1 2 1 , 1 , 2 1 , 1 ) ( 1 ) ( 1 ) ( ) ( ) ( ω λ ω ω λ ω ω ω λ ω λ ω λ L (90)
According equation (76), it is known that
⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ + + = − − − ) ( 1 1 1 ) ( ) ( ) 1 , 1 ( 1 , 1 1 ,
1 ω λ ω ω ω
λ
j G k jcJ J J J
J J
J
(91)
As 0G(J−1,1)(jω)≠ , obviously
) ( ) ( ) ( )
( 1, 1 2, 1 , 1
1 ,
1 ω λ ω λ ω λ ω
λ − ≠ − = − = JJ−
N J J J J J J
L (92) then ) ( 1 ) ( ) ( 1 ) ( ) ( 1 ) ( 1 , , 1 1 , 2 , 1 2 1 , 1 , 1
1 ω λ ω λ ω λ ω λ ω λ ω
λ − −
− − − − = ≠ = = = = J J N J J N J J J J J J J J
L (93)
Substituting (93) into λ1J−1,J−2(ω)
, ,λ2J−1,J−2(ω),L
) ( 2 ,
1 ω
λJ− J−
N , it can be proved that
) ( 1 ) ( ) ( 1 ) ( ) ( 1 ) ( 2 , 1 1 , 2 2 , 1 2 1 , 2 2 2 , 1 1 1 , 2
1 ω λ ω λ ω λ ω λ ω λ ω
λ − − − −
− − − − − − − − = ≠ = = = = J J N J J N J J J J J J J J L (94) Iteratively using above procedure until i=(L-1), then the property
) ( )
( )
( 2, 1 , 1
1 ,
1 ω λ ω λ ω
λii+ j ≠ ii+ j =L= iNi+ j (L−1≤i≤J−1) can be proved. By now, the whole second property is proved.
The third property is also straightforward since, according to equation (6), the output frequency response of the ith mass can be expressed as
∑
= + + = N k k k ii j G j F j
x 1 ) , 1 (
1( ω) ( ω) ( ω) (95) Using the first property, equation (95) can be written as
∑
= + + = N k k k i i ii j j G j F j
x 1 ) , ( 1 ,
1( ω) λ ( ω) ( ω) ( ω) (96) Obviously, )xi+1(jω)=λi,i+1(jω)xi(jω , then the third property is proved.
The above three properties can be easily extended to more general cases, as follows. iv) For any two masses which are either on the left of the nonlinear spring or on the right
of the input force, the following relationships hold.
) ( ) ( ) ( ) ( ) ( , ) , ( ) , ( ) 1 , ( ) 1 ,
( λ ω
ω ω ω
ω ii k
N k i N i k i i j G j G j G j G + + + = = =L
and
∏
− =+ + +
+ = 1
0
1 , ,
) ( )
(
k d
d i d i k
i
i ω λ ω
λ (98)
v) For any two masses which are either on the left of the nonlinear spring or on the right of the input force, the following relationships hold
) ( ) ( )
(jω λ, ω x jω
xi = ii+k i+k
(1≤i≤L−2 and i+k≤L−1 or J ≤i<n and J <i+k≤n) (99) vi) For any two masses located between the nonlinear spring and the input force, the
following relationships can be deduced from property ii).
) ( )
( ) ( )
( ) ( )
( )
( ,
) , (
) , (
) 2 , (
) 2 , (
) 1 , (
) 1 ,
( λ ω
ω ω ω
ω ω
ω ii k
N k i
N i k
i i k
i i
j G
j G
j G
j G
j G
j
G +
+ +
+
= =
=
≠ L
(L−1≤i≤J−1 and L≤i+k≤J ) (100) and
∏
− =+ + +
+ = 1
0
1 , ,
) ( )
(
k d
d i d i k
i
i ω λ ω
λ (101)
vii)For any two masses at the different sides of the nonlinear spring or at the different sides of the input force, the following relationships hold.
) (
) ( )
( ) ( )
( ) (
) , (
) , (
) 2 , (
) 2 , (
) 1 , (
) 1 , (
ω ω ω
ω ω
ω
j G
j G
j G
j G
j G
j G
N k
N i k
i k
i
= =
≠ L
(1≤i≤L−1 and L≤k≤n or 1≤i≤J−1 and J ≤k ≤n) (102) The proof of properties (iv)-(vii) only needs some simple calculations. The details are omitted here.
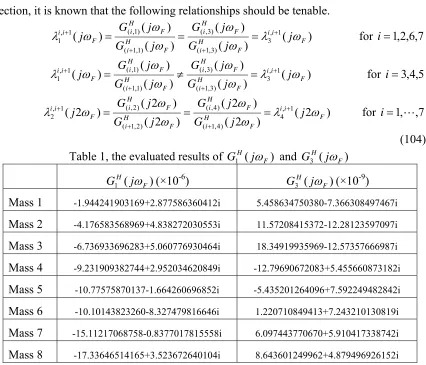
4 Numerical Study
To verify the analysis results in Section 3, a damped 8-DOF oscillator was used to conduct numerical studies, in which the fourth spring was nonlinear. As widely used in modal analysis, the damping was assumed to be proportional to the damping, e.g., C=µK. The values of the system parameters are taken as
1 8 1 = =m =
m L , r1 =k1 =L=k8 =3.5531×104, µ=0.01 2
1 2 0.8 r
r = × , r3 =0.4×r13, w1 =µr1, w2 =0.1µ2k2,w3 =0
and the input was a harmonic force acting on the 6P
th
P
mass, f(t)=Asin(2π×20t). If only the NOFRFs up to the 4P
th
P
order is considered, according to equations (16) and (17), the frequency components of the outputs of the 8 masses can be written as
) ( ) ( )
( ) ( )
( (,1) 1 (H,3) F 3 F
i F F
H i F
i j G j F j G j F j
x ω = ω ω + ω ω
) 2 ( ) 2 ( )
2 ( ) 2 ( )
2
( (,2) 2 (H,4) F 4 F
i F F
H i F
i j G j F j G j F j
x ω = ω ω + ω ω
( 3 ) (H,3)( 3 F) 3( 3 F)
i F
i j G j F j