Rochester Institute of Technology
RIT Scholar Works
Theses Thesis/Dissertation Collections
4-1-2011
Appearance-based image splitting for HDR display
systems
Dan Zhang
Follow this and additional works at:http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please [email protected].
Recommended Citation
CHESTER F. CARLSON CENTER FOR IMAGING SCIENCE COLLEGE OF SCIENCE
ROCHESTER INSTITUTE OF TECHNOLOGY ROCHESTER, NY
CERTIFICATE OF APPROVAL
M.S. DEGREE THESIS
The M.S. Degree Thesis of Dan Zhang
has been examined and approved by two members of the Color Science faculty as satisfactory for the thesis
requirement for the Master of Science degree
Dr. James Ferwerda, Thesis Advisor
Appearance-based image splitting for HDR
display systems.
Dan Zhang
B.S. Yanshan University, Qinhuangdao, China (2005)
M.S. Beijing Institute of Technology, Beijing, China (2008)
A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Color Science in the Center for Imaging Science, Rochester Institute of Technology
April 2011
Signature of the Author
THESIS RELEASE PERMISSION FORM
CHESTER F. CARLSON CENTER FOR IMAGING SCIENCE COLLEGE OF SCIENCE
ROCHESTER INSTITUTE OF TECHNOLOGY ROCHESTER, NEW YORK
Title of Thesis
Appearance-based image splitting for HDR display systems.
I, Dan Zhang, hereby grant permission to the Wallace Memorial Library of Rochester
Institute of Technology to reproduce my thesis in whole or part. Any reproduction will not be for commercial use or profit.
Signature of the Author
Appearance-based image splitting for
HDR display systems.
Dan Zhang
A thesis submitted in partial fulfillment of the requirements For the degree of Master of Science in Color Science
In the Center for Imaging Science, Rochester Institute of Technology
Abstract:
Acknowledgements
First, my utmost gratitude to my supervisor, Professor Dr. James Ferwerda, for his supervision, advice and guidance from the very early stage of my research and support throughout my thesis. It has been an honor to work with him during the past years.
I gratefully thank Professor Dr. Mark Fairchild for his precious advices for this research.
I would also like to thank Professor Dr. Roy Berns, and Dr. Dave Wyble. Their teaching has triggered and nourished my intellectual maturity that I will benefit from, for a long time to come.
Many thanks go to students of the Munsell Color Science Laboratory for their valuable advices, discussions and inspirations. Special thanks to Dr. Rod Heckman, Jonathan Phillips, Ben Darling, Dr. Koichi Takase, Susan Farnand, Pinghsu Chen, Jun Jiang, Marissa Haddock, Lawrence Taplin, Dr. Tongbo Chen, Val Hemink for their instruction, support and friendship over the past years.
I also benefited by outstanding works from Dr. Jiangtao Kuang and Stefan Luka, part of this dissertation would not have been built without their works.
I would like to thank my parents for their unselfish support. Especially, this dissertation is dedicated to my father Jinlu Zhang.
Table of Contents:
ACKNOWLEDGEMENTS ... V
TABLES OF CONTENTS ... VI
LIST OF FIGURES ... IX
LIST OF TABLES ... XIII
1 INTRODUCTION ...1
1.1 Background ...1
1.2 HDR Imaging Development ...3
1.2.1 Old solutions ...3
1.2.2 Digital HDR imaging ...5
1.2.3 HDR image splitting issue ...7
1.3 Research Goal ...9
1.3.1 Building HDR displays ...10
1.3.2 Developing iCAM06-based image splitting algorithm ...10
1.3.3 Testing the performance of HDR image splitting methods ...10
1.4 Document Structure ...11
2 LITERATURE REVIEW ...12
2.1 Colorimetry, Color Appearance And Image Appearance ...12
2.1.1 Colorimetry ...12
2.1.2 Color Appearance ...15
2.1.3 Image Appearance ...17
2.2 HDR Image Capture ...21
2.2.1 Capture by Film Scanning ...22
2.2.2 Capture by Digital Camera ...22
2.3 HDR Image Formats ...27
2.3.1 Higher Precision Encoding ...28
2.3.2 Pixar Log Encoding (TIFF) ...28
2.3.5 ILM OpenEXR (EXR) ...30
2.3.6 Microsoft/HP scRGB Encoding ...31
2.4 Human Visual System And HDR Tone Mapping ...31
2.4.1 Tone Mapping Problem ...32
2.4.2 Tone Mapping Operators ...33
2.5 HDR Display Devices ...35
2.5.1 Hardcopy Devices ...36
2.5.2 Softcopy Devices ...41
2.6 HDR Image Splitting Algorithms ...49
2.6.1 Luminance Square-root Image Splitting ...49
2.6.2 Optimization-based Image Splitting ...51
2.6.3 Full Color Image Splitting ...53
2.6.4 Model-based Image Splitting ...55
3 BUILDING HDR DISPLAY SYSTEMS ...58
3.1 Print-based HDR Display ...58
3.1.1 System Setup ...59
3.1.2 Registration ...61
3.1.3 Projector Colorimetric Characterization ...68
3.1.4 Printer Colorimetric Characterization ...76
3.1.5 Performance ...88
3.2 Projector-based HDR Display ...92
3.2.1 System Setup ...92
3.2.2 Registration ...102
3.2.3 HDR Display Colorimetric Characterization ...106
3.2.4 Performance ...116
3.2.5 More Analysis ...119
4 iCAM06-BASED HDR IMAGE SPLITTING ALGORITHM ...122
4.1 iCAM06-Based Image Splitting ...122
4.2 Potential Benefits of The New Algorithms ...123
4.4.1 Calculate XYZ image for LCD ...129
4.4.2 Calculate XYZ image for projection ...134
4.4.3 Calculate driving values ...135
4.5 Evaluation ...135
4.6 Analysis on Viewing Conditions ...137
5 EXPERIMENT FRAMEWORK ...143
5.1 Experiment Images ...143
5.2 Experiment Procedure ...145
5.2.1 Scaling Experiment ...145
5.2.2 Paired-comparison Experiment ...146
5.3 Results ...147
5.3.1 Scaling Experiment ...147
5.3.2 Paired-comparison Experiment ...153
6 CONCLUSIONS AND FUTURE WORK ...158
6.1 Conclusions ...158
6.2 Limitation ...159
6.3 Future Work ...160
7 REFERENCE ...161
8 APPENDICES ...174
8.1 Appendix One: Matlab Code ...174
8.1.1 Main code for projector-based HDR display ...174
8.1.2 HDR image splitting algorithms ...176
8.1.3 Psychophysical experiments ...179
8.1.4 Print-based HDR display demo GUI ...189
8.2 Appendix Two: Rendered Images ...195
8.2.1 Day Image ...195
8.2.2 Night Image ...196
8.2.3 Indoor Image ...197
List of Figures:
Figure 1-1: Approximate luminance levels in the real world scenes [Johnson 2005;
Ferwerda 1996] ...2
Figure 1-2: The Magpie by Claude Monet, 1869 ...4
Figure 1-3: HDR digital imaging pipeline ...6
Figure 1-4: Image splitting issue in building HDR display ...8
Figure 2-1: Illustration of bilateral filter theory ...19
Figure 2-2: Digital camera image processing diagram ...23
Figure 2-3: Images taken at nine exposure times [Fairchild 2008] ...23
Figure 2-4: Flowchart of the multi-exposure technique ...25
Figure 2-5: SpheroCam HDR panoramic camera picture [Sphero 2010] ...27
Figure 2-6: Bit distribution of Radiance RGBE/XYZE ...29
Figure 2-7: Human eye [González 2008] ...32
Figure 2-8: Photography of HDR viewer ...38
Figure 2-9: Schematic of HDR viewer ...38
Figure 2-10: Reflective HDR display ...41
Figure 2-11: LCD display inner structure [Plasma 2010] ...43
Figure 2-12: Sunnybrook Technologies’ projector-based HDR display ...44
Figure 2-13: Actual photo of the Sunnybrook Technologies’ projector-based display ....45
Figure 2-14: Prototype of dual layer LCD display ...46
Figure 2-15: Inner structure of LED-based HDR display ...47
Figure 2-16: Spatial color mixing between LED and LCD ...48
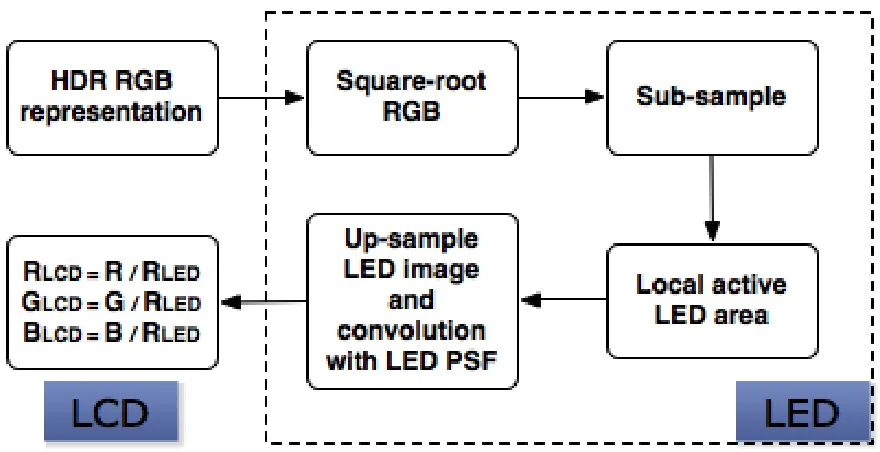
Figure 2-17: Rendering process for a LED-based HDR display ...48
Figure 2-18: Luminance square root method for HDR image splitting ...50
Figure 2-19: Gamut waste (blue region) of luminance square-root method ...55
Figure 2-20: Inaccessible colors (blue region) of luminance square-root method ...55
Figure 2-21: HDR display gamut in normalized XYZ coordinates ...57
Figure 3-1: Print-based HDR display system ...58
Figure 3-3: Calculated matte image ...64
Figure 3-4: Crop the images ...65
Figure 3-5: Finding correlation blobs ...66
Figure 3-6: Matlab GUI for registration ...67
Figure 3-7: Matlab GUI for demo ...68
Figure 3-8: Projector linearization measurement ...69
Figure 3-9: Spectral radiance under uniform projection ...70
Figure 3-10: Normalized spectral radiance under uniform projection ...71
Figure 3-11: Chromaticity shift at different digital counts ...72
Figure 3-12: Projector LUT ...72
Figure 3-13: Form factor compensation image ...74
Figure 3-14: Measurement spots to verify uniformity correction ...75
Figure 3-15: (a) HP Photosmart Pro B9100 printer, (b) Gretag Macbeth Eye-One Isis ....77
Figure 3-16: (a) Characterization chart and (b) its reference file ...78
Figure 3-17: Screenshot of Photoshop setup to print characterization target ...79
Figure 3-18: Screenshot of the Profilemaker when making profile ...82
Figure 3-19: Workflow for evaluating printer ICC profile prediction ...83
Figure 3-20: Convert to profile with absolute colorimetric intent ...84
Figure 3-21: Measurement data file ...84
Figure 3-22: Color difference histogram ...85
Figure 3-23: Color difference vector plot ...86
Figure 3-24: Printer gamut achieved on HP premium paper ...87
Figure 3-25: Combined projected and print image to check registration accuracy ...89
Figure 3-26: Color gamut of printer on HP satin matte advanced photo paper (mesh) and HP canvas (solid): (a) plotted in Lab space (b) plotted in xyY space ...91
Figure 3-27: Actual photo of dual-projector-based HDR display ...95
Figure 3-28: Projector-based HDR display ...95
Figure 3-29: HDR display built in Munsell lab ...96
Figure 3-30: Projector’s neutral behavior check (circles represent measured values) ...98
Figure 3-32: (a) The DLP LUT under standard mode, and (b) the DLP LUT under
dynamic mode ...101
Figure 3-33: Registration targets ...103
Figure 3-34: Alignment setup for HDR display ...103
Figure 3-35: Registration flowchart ...105
Figure 3-36: Flowchart of building HDR display colorimetric model ...107
Figure 3-37: HDR display characterization by using LMT ...109
Figure 3-38: Output luminance as a function of back and front panels ...110
Figure 3-39: (a) LCD red channel LUT. (b) LCD green channel LUT. (c) LCD blue channel LUT. (d) Projector LUT ...111
Figure 3-40: Scatter plot of CIEDE94 against a*b* for 216 factorial data ...112
Figure 3-41: Color difference histogram (Projector with filter) ...113
Figure 3-42: Color difference histogram (Projector without filter) ...114
Figure 3-43: A vertical line formed by single pixel ...115
Figure 3-44: Expanded vertical line formed by single pixel ...116
Figure 3-45: Comparison of MCSL HDR display primary and sRGB primary ...117
Figure 3-46: Gamut of the MCSL HDR display ...118
Figure 3-47: R, G and B primary spectra ...119
Figure 3-48: Spectra of projector white ...119
Figure 3-49: Transmittance spectra of LCD color filter ...120
Figure 4-1: iCAM06-based image splitting flowchart ...123
Figure 4-2: iCAM06-based image splitting for print-based HDR display ...127
Figure 4-3: iCAM06-based image splitting for projector-based HDR display ...128
Figure 4-4: (a) Square-root LCD image, (b) iCAM06-based LCD image, (c) Square-root DLP projected image and (d) iCAM06-based DLP projected image ...136
Figure 4-5: (a) LCD image and (b) projector image for average surround ...138
Figure 4-6: (a) LCD image and (b) projector image for dim surround ...138
Figure 4-7: (a) LCD image and (b) projector image for dark surround ...138
Figure 4-8: Image colorfulness differences between (a) average and dim surround, (b) dim and dark surround (c) average and dark surround ...141
Figure 5-2: Single rating experiment ...145
Figure 5-3: Pair comparison experiment ...146
Figure 5-4: Average quality ratings given to each image processed by two methods ...148
Figure 5-5: Per image differences between the average ratings for the two algorithms ..148
Figure 5-6: Regression fits to mean image ratings as a function of (a) image dynamic range; (b) average image luminance factor; and (c) image colorfulness ...151
Figure 5-7: Mean score of images for different categories ...152
Figure 5-8: Paired comparison results on all five attributes ...154
Figure 5-9: Paired comparison results for different image categories ...155
List of Tables:
Table 2-1: Color appearance phenomenon [Fairchild 2005] ...16
Table 2-2: Comparison of film and digital camera ...22
Table 2-3: Variants of the LogLuv format ...30
Table 2-4: HDR display elements ...44
Table 3-1: Projector setting for print-based HDR display system ...61
Table 3-2: Camera setting for geometric registration ...64
Table 3-3: Luminance measurement on spots 1 and 2 before and after correction. ...75
Table 3-4: Devices involved in characterization ...76
Table 3-5: Printer temporal stability CIEDE2000 error ...81
Table 3-6: Profile accuracy evaluation ...85
Table 3-7: Theoretical registration accuracy for print-based HDR display ...88
Table 3-8: Performance of print-based HDR display ...90
Table 3-9: LCD front panel setting ...97
Table 3-10: Projector setting for HDR display system ...99
Table 3-11: Measurements of the center of the white screen under different modes ...99
Table 3-12: Camera setting for HDR display geometric registration ...104
Table 3-13: Color differences before and after optimization (Projector with filter) ...113
Table 3-14: Color differences before and after optimization (Projector without filter) ..114
Table 4-1: Values of gamma in surround adjustment functions ...133
Table 4-2: Image colorfulness under different surround settings ...139
Table 5-1: Parameters of the regression fits ...152
1 Introduction
High dynamic range imaging (HDRI) is a set of techniques that allow a greater dynamic
range of luminance to be captured, stored and displayed compared to current standard
digital imaging techniques or photographic methods. This new HDRI technique allows a
more accurate representation of the real world scenes, ranging from faint starlight to
direct sunlight.
The goal of this thesis project is to develop an image splitting algorithm for building high
dynamic range (HDR) displays. Unlike conventional display system, HDR display uses
two optically coupled imagers to extend the dynamic range. This dual image plane design
requires that a given HDR input image be split into two complementary standard
dynamic range (SDR) components that drive the coupled systems; therefore, there exists
an HDR image splitting issue. To better describe, this chapter briefly overviews the
background and development of HDRI, and how it is incorporated into this study, which
is on building HDR displays.
1.1
Background
Dynamic range in this research is defined as the ratio between the brightest and darkest
luminance in a scene. Real-world scenes cover luminance levels as shown in Figure 1-1
from below 0.001 candelas per meter-square (cd/m2) to over 10,000 cd/m2 [Johnson
2005]. Therefore, the overall dynamic range we perceive is as vast as 10,000,000:1. In a
Figure 1-1: Approximate luminance levels in the real world scenes [Johnson 2005;
Ferwerda 1996]
Luckily, despite the fact that the real world scene could have a dynamic range of nearly
14 orders, over 9 orders of luminance magnitude [Kuang 2006] can be adapted by the
human visual system. The way that the human visual system works is through the
photoreceptors (namely rods and cones) on the retina, which then send the signal through
optic nerves to the brain, and finally an image is formed. As is suggested from Figure
1-1, the rods are extremely sensitive to light and provide achromatic vision at scotopic
levels of illumination, where color information is hardly perceived since the cones are
inactive. When the luminance level rises, the cones begin to function between 0.001 and
3 cd/m2 [CIE 1978]. This range is named the mesopic range where both photoreceptors
function. With a further increase in the luminance level, the rods saturation begins, and
the range where only the cones work is named photopic vision. Through slow adaptation
(mechanisms due to photopigment bleaching) in minutes, the human visual system is able
to the pupil and neural reactions), the eye’s static range is smaller, around 10,000:1, but it
still exceeds the capabilities of conventional imaging and display techniques.
Current digital cameras are significantly limited in capturing the full spectra content and
dynamic range of the outside world. Their captured dynamic range is between 100 or
1000 to 1 around a level set by aperture and shutter speed. There are also storing
problems, since even given a means of generating or acquiring dynamic range data, the
conventional file formats are incapable of accurately storing it. The same problems exist
in display technology. Conventional display systems are similar in that their output
dynamic ranges are on the order of 100 to 1 with maximum luminance output levels
around 80 cd/m2 and 250 cd/m2 for typical CRT displays and LCD displays [Xiao 2005]
respectively. Reflective media such as print paper has an even narrower dynamic range,
in most cases much less than 100:1 [Reinhard 2006].
1.2
HDR Imaging Development
Due to the always existing discrepancy between the real world dynamic range and the
limited dynamic range reproducibility of various media (paint, film, print and digital
images), research relating to HDRI actually started thousands of years ago.
1.2.1
Old Solutions
A long time ago, in the painting field, master painters made great effort to record the
using their special painting skills. The Magpie (Figure 1-2), an oil painting by Claude
Monet in1869, is an example that illustrates his marvelous painting technique to achieve
a high contrast in a snowy landscape.
For example, Monet painted the snow in high key while reinforcing the contrast with the
dark tree bark. At the same time, he made subtle variations in the shadow colors, from the
yellow tint of the sun to the cooler, bluish portion of the sky, and since our eyes are more
sensitive to local contrast, increasing these local details increase the overall perceived
contrast of the scene.
Figure 1-2: The Magpie by Claude Monet, 1869.
When film-based photography was invented, it used the action of light to cause changes
in a film of silver halide crystals in which development converts exposed silver halide to
metallic silver. However, capturing the enormous dynamic range of luminance on a
design film stocks and print development systems that gave a desired S-shaped tone
curve with slightly enhanced contrast in the middle range and gradually compressed
highlights and shadows [Hunt 2004]. To further solve the problems of silver halide
negatives having a greater dynamic range than the print media, “dodge and burn”
technique [Adams 1995] is introduced to manipulate the exposure of a selected area on a
photographic print. Dodging decreases the exposure for areas when the photographer
wishes it to be lighter, while burning is the reverse process that increases the exposure to
areas that should be darker in the print. Since this method effectively adjusts the local
contrast, it therefore leads to an improvement of the overall perceptual contrast in a
photograph. The only issue is that the same procedure has to be done for each print,
which can be quite time consuming.
1.2.2
Digital HDR imaging
With the advancement of digital photography and computer graphics, the imaging
industry will inevitably transit to HDR imaging with devices that provide a far greater
range. This completely overthrows traditional imaging techniques and requires a new
workflow, which can be seen in Figure 1-3. The HDR capture and storage side has the
same path, but for the display side, there are two paths: one leading to a SDR display
requiring tone-mapping techniques in order to compensate dynamic range differences.
The other path uses HDR display allowing the direct display of HDR content. Note that
for the convenience of the readers, a tone-mapped version of the HDR scene is used in
Figure 1-3: HDR digital imaging pipeline.
For capturing HDR scenes, methods for acquiring HDR images from multiple SDR
images have been established in recent years. This technique was first investigated by
Mann and Picard in 1995 [Mann 1995], and Debevec and Malik brought it into computer
graphics in 1997 [Debevec 1997]. Other research followed and include the work done by
Mitsunaga and Nayar [Mitsunaga 1999], Robertson [Robertson 1998], etc. that focus on
HDR still images capture. As for capturing HDR video, Kang proposed a method based
on a similar technique [Kang 2003]. The above technique involves merging several
images taking at different exposure times into one HDR image. Besides this
multi-exposure technique, recent advances in image sensor technology have the potential to
directly capture higher dynamic range using only one shot (More information is provided
in Chapter 2.).
For HDR storage, it employ a color space corresponding to particular output devices
different from current output referred standards. It is scene referred, meaning that the
Therefore it requires efficient representation that covers the full range of color values,
usually a luminance step size below 1% and good color resolution, as close to perfect as
the human vision’s discerning capability [Ward 2006]. Chapter 2 provides more detailed
description of recent work on HDR encodings, including Radiance RGBE encoding,
JPEG-HDR encoding, OpenEXR and etc.
For displaying HDR contents, there are two paths: one displaying on a SDR display
requiring pre-processing the HDR image by using HDR rendering algorithms or known
as tone-mapping operators (TMOs) to compensate for the dynamic range difference, and
at the same time, achieve a faithful visual representation of original scene. The other path
is displaying HDR contents on an HDR display directly where related research has also
been very fruitful in the last few years. In 2004, Ward and Seetzen et al. [Seetzen 2004]
constructed two different prototypes that vastly exceed the dynamic range of
conventional softcopy displays. In 2008, Bimber extended this idea to reflective media
and created a hardcopy HDR display system [Bimber 2008]. Currently, Dolby Inc. is
dedicated to bringing the softcopy HDR display technology to other manufacturers, thus
someday making HDR displays available to every household.
1.2.3
HDR image splitting issue
As stated in the above, the principle of building HDR display systems is double light
modulation that reproduce high dynamic range images by using two SDR imagers that
are optically coupled. As is shown in Figure 1-4, one imager (such as a projector or LED
transmissive LCD or reflective print), allowing HDR values to be reproduced by the
combination of the two. This dual image plane design requires that a given HDR input
image be split into two complementary SDR components that drive the coupled systems.
Therefore, there exists an HDR splitting issue for driving HDR displays.
Figure 1-4: Image splitting issue in building HDR display.
Work is just beginning on HDR image splitting algorithms and some of this work is
proprietary, but several algorithms have been published. The most widely used HDR
image splitting method is the luminance square root algorithm [Trentacoste 2007]. It first
converts an input HDR image to XYZ tristimulus values, then takes the square root of the
Y channel and sends this achromatic signal to one image plane, while also sending a
color signal created by composing
!
Ywith its corresponding X and Z channels to the
other image plane. Under ideal conditions this approach will reproduce the original
luminance range of the HDR input, but good color appearance reproduction is not
guaranteed or usually not even considered. Recently, Luka and Ferwerda [Luka 2009]
introduced a variation on the square root algorithm that accommodates HDR displays
improved the saturation of dark colors.
Guarnieri et al. [Guarnieri 2008] developed an HDR display for radiological applications
by layering two high quality grayscale medical LCD displays. Due to the critical nature
of the application, they were concerned with the accuracy of the displayed image and
effects of the image splitting algorithm on the visibility of image features. They
developed an optimization-based HDR image splitting algorithm that simultaneously
considered luminance reconstruction errors and spatial parallax errors caused by the
thickness of the layered LCD panels. They approached HDR image splitting as an
optimization problem and have produced an algorithm that typically achieves perfect
luminance reconstruction and minimal parallax errors. When a perfect reconstruction is
not possible, errors are minimized through the application of a visible difference metric.
While this algorithm is based on sound mathematical and perceptual principles, it is
designed to handle grayscale radiological images shown on a dual layer LCD display and
is not directly applicable to the general class of color HDR images or other HDR display
technologies.
1.3 Research goal
The goal of this thesis is to develop a new HDR image splitting algorithm that will create
displayed HDR images with improved image quality and also take image appearance
phenomenon into account by taking a more principled approach to the HDR image
splitting algorithm. To achieve this goal, this thesis work includes building both hardcopy
algorithm, and testing the resulting performance by psychophysical methods.
1.3.1 Building HDR displays
For the softcopy HDR display, the previous dual projectors-based HDR display system in
the Munsell Color Science Laboratory (MCSL) built by graduate student Stefan Luka
[Luka 2009] was modified to a single projector-based HDR display. For the hardcopy
HDR display, following the previous work done by Bimber [Bimber 2008], a print-based
HDR display was built. More details on display setups, building the displays, and their
colorimetric performance are described in Chapter 3.
1.3.2 Developing iCAM06-based image splitting algorithm
In color appearance phenomenon, color appearance models or image appearance models
are involved. The image appearance model iCAM06 was incorporated proving to be an
efficient model for both preference and accuracy in the rendering of SDR displays split
into a single HDR image. The ultimate goal is to make the recombined image approach
its actual appearance in a given viewing condition as close as possible. More details on
iCAM06 algorithm and its implementation into HDR and image splitting algorithm is
found in Chapter 4.
1.3.3 Testing the performance of HDR image splitting methods
Since observers are the final output of HDR display systems, the best way to verify an
algorithm’s performance is through psychophysical studies. In this project, both single
performance of the iCAM06-based HDR image splitting method to the widely used
square root luminance method. For the convenience of conducting the experiments, only
a softcopy (projector-based) HDR display is employed to collect the observers’ response.
1.4 Document structure
After the present chapter, which serves as an introduction to this study, Chapter 2 will
give an overview of previous work relating to this research interest and including an
introduction to color science, color and image appearance, HDR image capture, storage,
HDR displays, the human visual system, tone-mapping operators, and HDR image
splitting algorithms. Chapter 3 describes the detailed process of building both a
print-based and a projector-print-based HDR display. The new iCAM06-print-based image splitting
algorithm is then described in detail in Chapter 4. Next, Chapter 5 illustrates experiment
framework to compare the splitting algorithms’ performance between the new method
and the widely used square root method. Finally, conclusions and some possible future
directions are available in Chapter 6.
2 Literature Review
This literature review describes the previous work that relates to this thesis project. It
covers the basic theory of color science, color management, and state-of-art descriptions
of the HDR digital imaging pipeline and HDR image splitting algorithms.
2.1 Colorimetry, color appearance and image appearance
Colorimetry is the science and technology used to quantify and describe physically
human color perception [Ohno 2009]. According to a classic color science book by
Wyszecki and Stiles [Wyszecki 1982], colorimetry falls into two categories: (1) basic
colorimetry and (2) advanced colorimetry.
The basic colorimetry describes the nature of color perception, how to quantify this
perception by measurement device and judgment of whether two visual stimuli match.
Many of the basic colorimetry problems of color differences, chromatic adaptation, and
color appearance are well defined and solved. Advanced colorimetry finally leads to the
color appearance of color stimuli presented to the observer in complicated surroundings.
Next, image appearance models that include spatial and temporal vision properties for
image difference evaluation or HDR image rendering are also studied.
2.1.1 Basic colorimetry
In color perception, the three necessary elements are objects, light sources, and the
For the study of light sources, the CIE (International Commission on Illumination)
published a series of well-known standard illuminants such as CIE standard illuminant A,
D65 and D50. More detailed information can be found on the CIE website [CIE 2003]:
These standard illuminants provide a basis for comparing colors recorded under different
lighting.
For the study of objects, light interacts with the object material by reflection,
transmission and absorption with terms of reflectance (ratio of reflected energy to the
incident energy), transmittance (ratio of transmitted energy to the incident energy) and
absorbance (ratio of absorbed energy to the incident energy). Accurate measurement of
theses parameters are needed to quantify color perception. These parameters are not only
a function of wavelength, but also a function of the illumination and viewing geometry.
The CIE recommends measurement geometry (bidirectional 45/0 and hemispherical d/0),
explained in the Principles of Color Techonology [Berns 2000], but to get a complete
measurement of these parameters, bidirectional reflectance distribution functions
(BRDFs) need to be obtained requiring a thorough point-wise measurement of object
reflectance taking both light source input angles and output angles into account. More
information on BRDF definitions and BRDF models (such as Ward model [Ward 1992]
and Cook-Torrance model [Torrance 1967]) can be found in the Digital Modeling of
Material Appearance [Dorsey 2008].
facilitate human perception. Color perception is first mediated by cones with sensitivity
in the long (L(λ)), middle (M(λ)) and short wavelength (S(λ)) region of the spectra. To
further develop the relation between cones’ spectral response function and calculation of
color perception, color matching experiments were first performed in 1931 to drive the
color matching functions (CMFs) of a small number of color normal observers. They
were later transformed to XYZ primaries to eliminate the negative values and force one
of the functions equal to the CIE 1924 photonic luminous efficiency function (V(λ)).
Later, they were adopted by the CIE as the CIE 1931 standard observer and are widely
used to calculate color perception in the industry. Several years later, the CIE 1964
standard observer was proposed to extend the viewing angle from 2° to 10°. The research
interests in defining color matching functions is ongoing. In 2006, the CIE 2006 model is
defined as a convenient framework for calculating CMFs for any field size between 1°
and 10° and age between 20 and 80 years [Fairchild 2007].
By knowing the relevant parameters of objects, light sources and the human visual
system, color could be digitally defined by XYZ tristimulus values. But there are several
limits of the XYZ color space (uniformity issue and etc.) leading to the development of
opponent color spaces such as CIELAB, CIELUV, etc. Since it is not intended to provide
complete details about colorimetry here, more details and information are available in the
2.1.2 Color appearance model
In everyday life, color is not viewed alone as the surrounding environment also has a big
effect on color perception and as the human visual system adapts to this environment.
Furthermore, there are various color appearance phenomena (listed in Table 2-1) that fail
to be accounted for in basic colorimetry.
Note that for the study of these effects listed in Table 2-1, viewing flare is usually not
considered. For example, the Bartleson-Breneman that the darker the surround, the less
perceived contrast is opposite to our daily life experience since when we view image in a
dark surround, we will feel that the contrast is increasing comparing to the surround with
the a light turned on. This is because of flare in the viewing condition which is very
difficult to avoid without careful control.
The various color appearance models, such as the Nayatani et al. model [Nayatani 1990],
the Hunt model [Hunt 1994], the RLAB model [Fairchild 1996]; CIECAM97 model [CIE
1998] and CIECAM02 [CIE 2004] were developed to incorporate these phenomenon on
color perception.
Though the detailed equations of each model differ a lot from each other, these models
proceed with the following three main steps: (1) Chromatic adaptation: the estimation of
the color perception under different light sources, (2) Nonlinear response compression:
computation of perceptual appearance correlate that usually include lightness, brightness,
[image:30.612.84.532.180.693.2]hue, chroma, colorfulness and saturation.
Table 2-1: Color appearance phenomenon [Fairchild 2005].
Color appearance phenomenon
Example Explanation
Simultaneous contrast
Shift in color appearance when the background color is changed.
Crispening Increased in perceived color difference magnitude due to the similarity of
background and stimuli.
Spreading
Apparent mixture of a color stimulus with its surround.
Bezold-Brucke hue shift
Perceived hue changes with luminance. Plot shows the wavelength shift required to maintain a constant hue.
Abney effect
Perceived hue changes with colorimetric purity.
Plot shows constant hue in the CIE 1931 chromaticity diagram.
H-K effect
Brightness depends on luminance and chromaticity. Plot shows contours of constant brightness-to-luminance ratio.
Hunt effect
Colorfulness increases with luminance. Plot shows corresponding chromaticities across changes in luminance.
Stevens effect
Perceived lightness contrast increases with increasing adapting luminance.
Helson-Judd effect Nonselective samples do not appear neutral under strongly chromatic
illumination.
Bartleson-Breneman
These models are capable of predicting the appearance of spatially simple color stimuli
under a wide variety viewing conditions. However, such models do not directly
incorporate any of the spatial or temporal properties of human vision and the perception
of complex stimuli such as images. Therefore, there is research interest in developing
image appearance models for when a stimulus is observed in practice in a much more
complicated viewing environment than a uniform field under a given luminance.
2.1.3 Image appearance model
Image appearance models account for more complex changes in visual response by
extending color appearance models to include spatial vision, temporal vision and image
quality properties [Fairchild 2005]. Therefore, given an input images and viewing
conditions, an image appearance model can provide perceptual attributes of each pixel by
taking human visual system into account.
The first stage of the development of image appearance models is to incorporate
convolution kernels to approximate the contrast sensitivity function (CSF) of the human
visual system [Zhang 1996]. Therefore the information that is less sensitive to human
perception is removed when evaluating per-pixel image differences. Later, other spatial
models are developed: CVDM [Elaine 1998], Sarnoff Model [Lubin 1997], and MOM
[Pattanaik 1998]. However, these models are either not powerful enough for general
image appearance prediction or computational expensive: therefore, iCAM [Johnson
2003] was developed to combine the knowledge about color appearance, spatial vision
get an adapting image for calculating per-pixel based chromatic adaptation, then use an
exponential function to modulate image (a kind of gamma factor) at a per-pixel basis.
The iCAM image appearance model accounts for local image information and therefore
shows great potential in image appearance prediction, image difference metrics and HDR
image rendering.
Based on the iCAM framework, iCAM06 was developed especially for HDR image
rendering applications with some improvements to achieve more pleasant and accurate
HDR rendering [Kuang 2007]:
(1) Bilateral filter technique: to separate the image into a base-layer and a detail-layer by
utilizing its edge-preserving feature. The base layer is obtained using a non-linear
bilateral filter where each pixel is weighted by the product of a Gaussian filter in the
spatial domain and another Gaussian filter in the intensity domain (shown in Eqs. (2-1)
and (2-2)).
(2-1)
(2-2)
Where Is is the intensity value for pixel s. k(s) is a normalization term, f() is a Gaussian
function in the spatial domain with the space kernel scale σs and g() is another Gaussian
function in the intensity domain with its range kernel scale σr. The space kernel scale σs
Js = 1
k(s)p"#
$
f(p!s)g(IP !IS)IP
k(s)= f(p!s)g(IP !IS) p"#
affects the size of the considered neighborhood and the range kernel scale σr controls the
amplitude of the edge. σs is similar to the common Gaussian blur application. The bigger
the σs, the more neighborhood is included in the result and higher accuracy is achieved at
the sacrifice of lower computation speed. The bigger the σr, the faster the computational
speed but less edge information will be preserved. An example is provided in Figure 2-1
[Paris 2007], to preserve more image details, range scale σr that relates how accurate the
edge information can be preserved is a more critical setting.
Figure 2-1: Illustration of bilateral filter theory.
To achieve both a satisfying result and reasonable computational speed, σs is set to
empirical value of 2% of the image size and σr is set to a constant value of 0.35 [Kuang
2007]. With bilateral filtering technique, edge and detail information of the original input
image are better preserved.
(2) Replace the simple non-linear local gamma correction in iCAM with the
photoreceptor response functions from previous color appearance research. It uses a
linear von Kries normalization of the spectral sharpened RGB image signals by the RGB
adaptation white image signals at each pixel location.
(3) Extend to a larger range of luminance by incorporating scotopic and photopic vision.
The rods’ and cones’ response functions are calculated separately and the final tone
compression response is a sum of the two.
(4) Simulate the colorfulness changes predicted by Hunt effect by incorporating a
luminance dependent local colorfulness enhancement module.
(5) Simulate the contrast change suggested by the Stevens effect by incorporating a
luminance dependent local contrast enhancement module.
(6) Simulate Bartleson-Breneman surround effect by incorporating a luminance
dependent correction module.
Steps (4) to (6) are done in IPT color space. First, the tone-compressed RGB signals are
converted back to CIE XYZ image and combined with the detail image layer. Next, the
combined CIE XYZ image is converted into the IPT uniform opponent color space. P and
T adjustments are used to predict Hunt effect, and a power function is applied to the I
channel in IPT space to account for Bartleson-Breneman surround effect [Kuang 2007].
2.2 HDR image capture
Two media (film and an electronic image sensor) are usually involved in photography.
Though the basic techniques of the two are quite different, they share many common
features. For better understanding, comparisons of the two are listed in Table 2-2
[McCann 2010].
The lens and camera body are the same for film and the digital camera processes. The
sensor processing is different, one is mainly chemical process and the other one is digital
image processing, but the basic imaging principles of the two are the same. Therefore, in
order to enhance the dynamic range of these two media, they can share a similar idea of
using the multi-exposure technique which will be described later in this Chapter. The
difference is that they will be conducted differently based on their individual medium
characteristics. Detailed descriptions of extending the dynamic range of film and digital
cameras will be described in separated section.
Table 2-2: Comparison of film and digital camera.
Components Film Digital
Lens Aperture, F number,
coating, resolution Same
Camera Volume, surface Same
Sensor Resolution, spectral &
dynamic range
Same
Sensor processing Developer, stop bath,
hypo, hypo clearing, tone, wash (B&W).
A/D, noise reduction, de-mosaic, sharpening,
color enhancement.
Storage Dry negative Digital file
2.2.1 Capture by film scanning
Film camera records a nearly 10,000:1 dynamic range by film emulsions [Reinhard
2006]. To record the full log range of the negative film in an HDR format, a film scanner
with know response curve needs to be used. Once a scanner’s file format is obtained, it is
then “developed” this file at several different exposures and merged into one image in
HDR format.
2.2.2 Capture by digital camera
To better illustrate the HDR image capture issues for a digital camera, the image
processing pipeline of a typical digital camera is illustrated in Figure 2-2 [Liu 2002]. The
light passes through the lens and is projected on the color filter array (CFA) then
converted into electrical signal by the CCD. Next, the signal is amplified by the
automatic gain control (AGC) and converted into a digital signal by an ADC (analog to
digital converter). Finally, the image is processed (demosiacing, auto white balance, color
correction, gamma correction, etc.), enhanced, compressed (such as JPEG), then stored.
Since the lens is merely a passive element that refocuses the incoming light, the
limitation of dynamic range is caused mainly by sensor structure design. It is quite
difficult to improve the sensor’s ability to capture the dynamic range of a real scene,
since, for sensor manufactures, there are tradeoffs between dynamic range and contrast,
pixel size and noise level, and etc., and for most current cameras, the captured range is
the real world dynamic range. Figure 2-3 provides a concrete example that illustrates
[image:37.612.100.520.147.352.2]some of these tradeoffs.
Figure 2-2: Digital camera image processing diagram [Liu 2002].
[image:37.612.145.469.420.641.2]In this example, a tree with yellowish leaves in direct sunlight produces high luminance
while the rock near the lake is quite dark. If the camera’s exposure is set to capture detail
in the rock, the bright tree is blown out and the its detail lost. If we set the camera’s
exposure to capture detail in the tree, the rock will be totally dark and no detail preserved.
Therefore we need several separate shots from the traditional camera to make each pixel
from the bright tree to the dark rock properly exposed.
2.2.2.1 Multi exposure capture
In order to take HDR image using a traditional camera, the most accessible way is to take
more than one photograph of the same scenes covering different exposure times from
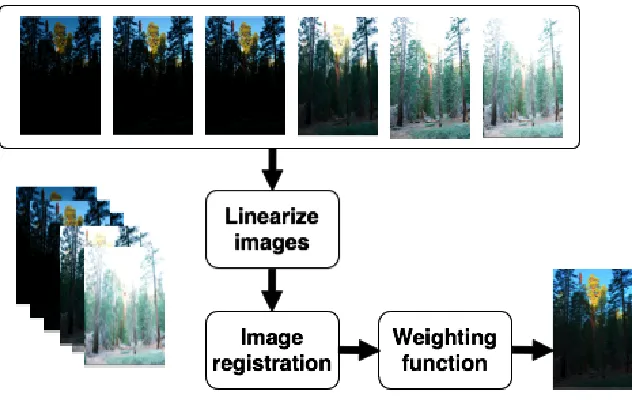
under-exposed to over-exposed images. The flowchart is illustrated in Figure 2-4. There
are three main steps for merging these images taken at various exposure times into one
HDR image.
First is linearization, which involves measuring the tone curves of the camera. They can
be measured by taking images of step-chart or OECF chart under uniform illumination
(lightbooth or 45° projecting light on both sides) or by sampling the camera response
function at each pixel under the scene captured at different exposures [Debevec 1997],
Figure 2-4: Flowchart of the multi-exposure technique.
Next is image registration which is a crucial part of final image quality since HDR
capture involves taking several images and it is rare that the camera can be held stable
during capture. There are several techniques developed in the past years that account for
camera and object movement in a scene by estimation motion variance [Kang 2003].
MTB (mean threshold bitmap) is proposed by Greg Ward that finds the least shift errors
of all pixels to achieve best image alignment [Ward 2003].
Finally, the final HDR image is computed as a weighted sum of these images. Mann used
the derivative of the system response curve as the weighting function [Mann 1995];
Robertson used a Gaussian-like function as the weighting function [Robertson 2000]. The
latter work assumes that the mid-range pixels are more reliable. The weighting function
reflects the certainty with which the value of an individual pixel in any of the input
2.2.2.2 Direct capture
In recent years, sensors which can capture a full dynamic range of a scene in a single shot
have been developed and some are commercially available: the Autobrite cameras from
SMaL Camera Technologies, the SpheroCam HDR panoramic camera (shown in Figure
2-8) from Spheron VR and the Ladybug spherical camera from Point Grey Research. One
example is placing an optical mask with spatially varying transmittance adjacent to a
conventional image detector array thereby giving adjacent pixels on the detector different
exposures of the scene [Nayar 2000], thus makes the capture of an outstanding HDR
image in a single pass possible. The final HDR image is reconstructed by aggregation and
interpolation. This technology has the advantage of producing an HDR image in real time
and is applicable to moving scenes. The shortcoming is that most current equipment are
very expensive and thus limited to commercial use.
But with more and more attention on HDR capture, an HDR camera will be available to
the consumer market in the near future. Recently, iPhone 4 developed a new HDR feature
that takes 3 frames at different exposure times and merges then into one HDR image.
After tone-mapping, it can be directly viewed on the retina display of an iPhone 4. The
whole process takes about 5-10 seconds, and for the scene with higher dynamic range, the
final tone-mapped image quality (better color reproduction, more detail, more contrast,
etc.) is quite satisfying than that of the single-exposure image, therefore future HDR
capture applications should not be limited to the DSLR camera market since it already
Figure 2-5: SpheroCam HDR panoramic camera picture [Sphero 2010].
2.3 HDR image formats
Traditional RGB image formats are tailored for traditional display devices, therefore the
color gamut is constrained by red, green and blue monitor phosphors and the luminance
encoding is often limited to 2 orders of magnitude. Formats such as JPEG and GIF
provide 8 bits per color channel, RAW and PNG offer up to 16 bits per color channel, but
most of them represent exactly the same color gamut. So they are still not capable of
encoding HDR image information.
There is a need for a common format that could be understood by both HDR capture and
HDR display to better encode color gamut and luminance of the real world scenes that
facilitates the HDR digital imaging pipeline. Requirements [Ward 2006] for encoding
HDR image are listed below followed by a review of a few of the main HDR image
(1) Luminance encoding: the quantization error should be below 1% with more than
12 orders of magnitude.
(2) Faithfully represent the full visible color gamut.
(3) Better correlate with perceptually uniform luminance and good color resolution to
be able to encode any image with fidelity as close to the human vision’s
discerning ability.
2.3.1 Higher Precision Encodings
The simplest way for HDR image storage is to extend the RGB components to 32-bit
floats point directly like the 96-bit IEEE TIFF. Obviously it has high enough precision,
but the resulting huge size multiplier (up to 36MB as an uncompressed) will cause a lot
of trouble in storage and compression, thus limits its real application.
2.3.2 Pixar Log Encoding (TIFF)
This format was proposed by Pixar for use in film recording since film has a greater
dynamic range than a standard 24-bit/pixel image and a logarithmic encoding for RGB
values. By utilizing this representation, this format was able to encode a dynamic range
of about 3.8 orders of magnitude in 0.4% steps [Holzer 2008] meeting the requirement of
the 1% luminance visible JND threshold [Ward 2006]. However, this format has limited
application since it was used internally at Pixar and is not well-known to the computer
2.3.3 Radiance RGBE/XYZE Encoding
The Radiance RGBE format is probably the most widespread in the HDR imaging
community. It has one byte for the red, one byte for the green, one byte for the blue and
one for a common exponent used as a scaling factor on the three channels as is shown in
Figure 2-6. Thus it has 32 bits/pixel covering a luminance range of over 76 orders of
magnitude at the expense of absolute accuracy, which is still about of about 1% and is
just sufficient for surpassing human perception [Holzer 2008]. Besides, since it only
supports positive RGB values, it cannot represent all colors of the visible gamut [Ward
1998].
Figure 2-6: Bit distribution of Radiance RGBE/XYZE [Holzer 2008].
To fix this problem, XYZE was developed which uses the “imaginary” primaries of the
CIE XYZ color space instead of the “real” primaries thus extending the range of color to
the entire visible gamut [Ward 2006].
2.3.4 SGI LogLuv (TIFF)
SGI LogLuv was proposed by Ward at SGI to create a more efficient or perceptual-based
encoding than Radiance RGBE. This encoding is based on visual perception and
of JPEG YCC encoding, they both separate the luminance logarithmically and
chrominance values (CIE u’v’) linearly in separate channels, as shown in Table 2-3
below. The first variant (LogLuv24) is able to cover a dynamic range of 4.8 orders of
magnitude in uniform 1.1% steps but causes visible artifacts due to the limited luminance
range [Roimela 2006]. The second variant (LogLuv32) consists of 15-bit encoding of
luminance covering a range of 38 orders of magnitude in 0.3% steps [Ward 2006]. Both
variants are a part of Leffler’s TIFF library [Ward 2006].
Table 2-3: Variants of the LogLuv format.
Variants Luminance Chrominance Diagram
LogLuv24 10 bits 14 bits
LogLuv32 16 bits 16 bits
2.3.5 ILM OpenEXR (EXR)
Starting in 1999, Industrial Light and Magic (ILM) developed OpenEXR, a HDR image
file format for use in digital visual effects production. In early 2003, ILM published open
source code for reading and writing the OpenEXR image format.
It supports 32-bit floating point precision per component, but its primary form is a 16-bit
floating point per RGB-primary encoding (half-format) divided into 1 sign bit, 5
exponent and 10 mantissa bits [Holzer 2008]. This half format supports de-normalized
numbers, positive and negative infinities and NaNs. It is able to covert the entire visible
Since it is identical to the half data type in NVIDIA’s Cg graphics language, there is a
convenient transplantation from OpenEXR image directly to the current NVIDIA GPUs.
All these unique features of OpenEXR make it a good fit for high-quality image
processing and storage applications [Kainz 2009].
2.3.6 Microsoft/HP scRGB encoding
A new set of encodings named scRGB for an HDR image representation has been
proposed by Microsoft and Hewlett-Packard (HP). This grew out of the sRGB
specification widely used for SDR encodings. The scRGB standard is divided into two
parts, one employing 48 bits/pixel in an RGB encoding and the other employing 36
bits/pixel either as RGB or YCC. In the 48 bits/pixel encoding, though it considerably
improves sRGB, it cannot represent the full gamut at higher luminance levels reducing its
precision and limiting its dynamic range to about 3.5 orders of magnitude [Ward 2006].
In the 36 bits/pixel encoding, though it uses 25% fewer bits, its dynamic range is 3.2
orders close to 48-bit version. But it has similar disadvantages at the top end of the gamut
with less dynamic range limiting its commercial use and requires further improvement
[Holzer 2008].
2.4 Human visual system and HDR tone mapping
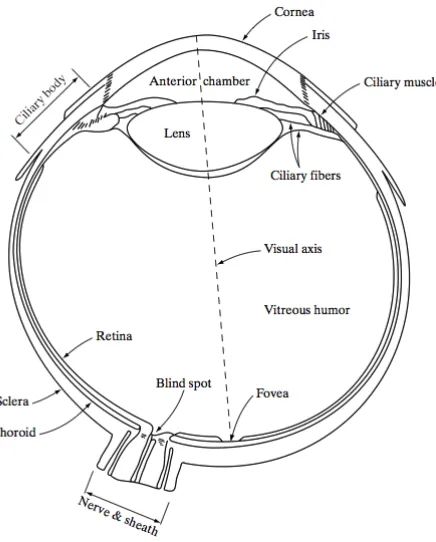
The human eye acts like a camera. The cornea is a transparent structure in the front of the
is finally focused onto a light sensitive membrane call the retina that is illustrated in
Figure 2-7.
Figure 2-7: Human eye [González 2008].
Through local adaptation, the human visual system can perceive a dynamic range about
10,000:1 [McHugh 2011] exceeding the capabilities of conventional display techniques
by several orders of magnitude. Therefore to reduce this dynamic range discrepancy and
display an image with realism, HDR tone mapping techniques are actively being studied.
2.4.1 Tone mapping problems
In order to fit the dynamic range of a HDR scene into a SDR display, the simplest way is
scene are lost. To solve this problem, visual models are used when mapping dynamic
range. The ultimate goal is to reproduce the visual appearance of the original scene on a
SDR display. Current tone mapping operators could be classified as global operators or
local operators.
2.4.2 Tone mapping operators
The HDRI book [Reinhard 2006] gives a good review of a number of tone mapping
operators intended to map HDR images to SDR displays.
2.4.2.1 Global operators
For a global operator, every pixel in the image is mapped the same way by a non-linear
functions based on the luminance and other global variables independent of a pixel’s
position. One global image adjustment tool is the Photoshop Curve Tool which take input
tone scale and selectively stretches or compress them. Similar to the “S-curve” that
applied to film industry, a “S-curve” for this global adjustment can add contrast to the
midtones that are perceptually more important at the expense of shadows and highlights.
This technique has the advantage that it is simple and fast, but with the sacrifice of some
detail information.
Previous work includes the Miller brightness-ratio-preserving operator and the
Tumblin-Rushmeier brightness-preserving operator. Both operators tend to preserve the brightness;
the difference is that Tumblin-Rushmeier operator attempts to preserve the brightness
brightness-ratio-preserving operators that aim to preserve the brightness sensation, there
are also operators that focus on preserving contrast such as the Ward contrast-based scale
factor and the Ferwerda model of visual adaptation. The difference is that Ferwerda et al.
added a scotopic component to the photopic component. Other work done on global
operators include Ward histogram adjustment [Ward 1997], sigmoid transformation
[Braun 1999], etc.
2.4.2.2 Local operators
Unlike global operators which apply the identical mapping function on all pixels, local
operators assume that a viewer does not adapt to the scene as a whole, but to smaller
regions changing each pixel according to its position and different local operators
handling the local adjustment differently. Previous works include Retinex [Land 1977],
Retinex-based adaptive filter [Meylan 2005], Multiscale observer model (MOM)
[Pattanaik 1998], Bilateral filtering technique [Durand 2002], iCAM [Johnson 2003],
iCAM06 [Kuang 2003] and etc.
Retinex is a word derived from “retina” and “cortex” suggesting that both the eye and the
brain are involved in the processing. Retinex theory explains how the visual system
extracts reliable information from the world despite changes of illumination, which is the
color constancy problem in color science world. The conclusion is that the perceived
color of a unit area could be separated into three parts (long, middle and short) in the
retina depending on not the absolute value of light but the reflectance of objects [Land
theory. Rather than applying a Retinex independently to the R, G, B color channels, they
apply Retinex only to the luminance channel to prevent high contrast losses while, at the
same time, preserve color information [Meylan 2005]. MOM (multiscale observer model)
is based on a multiscale representation of luminance and color processing in the human
visual system [Pattanaik 1998]. It ranks among the more complete color appearance
models. Bilateral filtering is already briefly introduced in Chapter 2 and more details on
its application in iCAM06 HDR rendering could be found in Chapter 4. Different from
the above examples of local operators, the iCAM and iCAM06 models not only aim at
dynamic range reduction, but also serve as image appearance models accounting for
traditional color appearance phenomenon. Other work includes Reinhard’s photographic
tone reproduction operator, Ashikhmin’s operator, etc.
In summary, though the local processing is more complicated than global, local
processing has better performance since local processing can increase both local contrast
and the visibility of some parts of the image. This is quite similar to how human
perception functions and thus allows a better imitation of the human visual system,
therefore leads to better rendered image quality.
2.5 HDR display devices
While the dynamic range of image capture devices can be increased using multiple
capture methods or new imaging sensor technology, high dynamic range display devices
are similar in that their output dynamic ranges are on the order of 100 to 1 with maximum
luminance output levels around 80 cd/m2 and 250 cd/m2 for typical CRT displays and
LCD displays [Xiao 2005]. Let alone the print image, which has even a lower dynamic
range (less than 100:1) due to the limitation of ink properties and optical brightness of the
paper.
In order to provide solutions, research trends lead toward better display devices, which
are capable of displaying images with a dynamic range much more similar to that
encountered in the real world. According to different medium, HDR display devices
could be classified into two major categories: softcopy devices and hard copy devices.
2.5.1 Hardcopy devices
For hardcopy media, there are reflective media and transparent media. But both of them
are inherently LDR and the reasons are illustrated consecutively below:
Reflective media is usually used in printing industry, including traditional ink presses and
digital printing presses, where subtractive color production principles are employed. Inks
with various spectral characteristics absorb particular wavelength of light, which leads to
different color reproduction. The dynamic range of the print image is inherently low,
since it is quite difficult to achieve values in both white and black ends. For white end,
according to colorimetry knowledge, tristimulus values of the white point of reflective
media are determined by both light source and print’s reflectance. Given a light source,
whiten the paper appearance. It usually adopts fluorescent agents, which re-emit light in
the short wavelength region (typically 420-470nm), thus to get more visible light.
However, this could only increase the paper white at a limited extent. As for the black
end, the dyes and pigments have a limited maximum absorption, even if we had best
available absorbing ink, which is generally no better than 99.5% [Reinhard 2006], the
surface of the print itself also reflects light to some extent, thus undermine contrast in the
dark region. Therefore the reflective print media is inherently LDR, with a dynamic range
about 100:1 at best by carefully controlling inks, illumination and background.
Transparent media mostly is designed for projection, such as a 35-mm slide transparency
movie film. Since transparencies rely on a controlled light source and optics, the ambient
environment is under much tighter control, such as in cinema, where transparencies are
viewed in a darkened room with a dark surround. The maximum density, which
determines how dark a transparency can get is only limited by the film chemistry and
printing method. Therefore, though slides and movies are not really HDR, but its
dynamic range (about 1000:1) is bigger than reflective print and has potential to be used
in simple HDR viewers/displays. In order to extend dynamic range of transparent media
and reflective media, HDR still image viewer and reflective HDR display are proposed.
2.5.1.1 HDR still image viewer
The original prototype of HDR still image viewer was created at the Lawrence Berkeley
Laboratory in 1995 to evaluate HDR tone-mapping operators. Later, it is reviewed and
Figure 2-8: Photography of HDR viewer [Ledda 2003].
Figure 2-9: Schematic of HDR viewer [Ledda 2003].
It uses three elements: a bright uniform backlight, a pair of layered transparencies and a
set of LEEP ARV-1 optics. Square root luminance method is used to split a single HDR
image into two transparency layers, which will later be combined in the viewer. A
Gaussian blur function is applied to the back layer to reduce misregistration and parallax
between the two layers. Then by subsequently dividing the back layer into the original,
combination of the two transparency layers is equivalent to adding the densities and the
original HDR view could be achieved by this way. Note that the blurring artifact is less
likely to occur due to alias in human visual system, and this two overlaid transparencies
could achieve a contrast ratio around 10,000:1 [Ledda 2003].
This HDR transparency viewer demonstrates the feasibility of splitting the image into
two layers, which then combined together to produce an HDR view. This idea is of vital
importance to the principles adopted in reflective HDR system and softcopy devices,
which will be explained later.
2.5.1.2 Reflective HDR display
In 2008, Bimber et al. presented a projector-camera system (as is shown in Figure 2-10)
to extend dynamic range of reflective media, such as photographs, radiological paper
prints, ePaper and etc. It also adopts double light modulation and the technique is based
on a secondary modulation of projected light being surface-reflected. And they achieved
physical contrast ratios of 45,000 to 60,000:1 with a peak luminance of more than 2750
cd/m2 [Bimber 2008]. The idea is to figure it out the dynamic range and gamut capability
that could be achieved by the whole system by creating a big LUT, and then square-root
splitting could be applied and the split image could be converted to driving signal of
printer and projector via the LUT. The full printer’s transfer function (printed patch under
projected illuminat
![Table 2-1: Color appearance phenomenon [Fairchild 2005].](https://thumb-us.123doks.com/thumbv2/123dok_us/52255.4770/30.612.84.532.180.693/table-color-appearance-phenomenon-fairchild.webp)
![Figure 2-2: Digital camera image processing diagram [Liu 2002].](https://thumb-us.123doks.com/thumbv2/123dok_us/52255.4770/37.612.145.469.420.641/figure-digital-camera-image-processing-diagram-liu.webp)
![Figure 2-9: Schematic of HDR viewer [Ledda 2003].](https://thumb-us.123doks.com/thumbv2/123dok_us/52255.4770/52.612.205.405.98.246/figure-schematic-hdr-viewer-ledda.webp)
![Figure 2-11: LCD display inner structure [Plasma 2010].](https://thumb-us.123doks.com/thumbv2/123dok_us/52255.4770/57.612.133.480.71.276/figure-lcd-display-inner-structure-plasma.webp)
![Figure 2-21: HDR display gamut in normalized XYZ coordinates [Luka 2009].](https://thumb-us.123doks.com/thumbv2/123dok_us/52255.4770/71.612.142.487.105.337/figure-hdr-display-gamut-normalized-xyz-coordinates-luka.webp)