Theses
Thesis/Dissertation Collections
1991
Computational methods for contact stress
problems with normal and tangential loading
Christopher R. McGoldrick
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
Computational Methods for Contact Stress
Problems with Normal and Tangential Loading
Christopher R. McGoldrick
Master of Science Thesis
1991
Rochester Institute Of Technology
College of Engineering
Department of Mechanical Engineering
Approvals:
J0seph Torok - Thesis Advisor
.Richard Budynas
Richard Hetnarski
Mark Kempski
I
Christopher R. McGoldrick
hereby grant permission
to
Wallace Memorial Library
of
Rochester Institute of Technology
to reproduce my thesis
in
whole or part.
Thesis
Abstract:
Computational
Methods for Contact
Stress
Problems
withNormal
andTangential Loading.
Christopher
R.
McGoldrick
Master
ofScience
Mechanical
Engineering
Rochester
Institute
Of
Technology
Rochester,
New York
January,
1991
This
investigation
contains anhistorical
overview of contact stressesincluding
various classifications of
the
problem andtheir
associated solutions.The
solutionfor
the
normalloading
elliptical contact problemis
reviewed,
asformulated
using
classic methods oflinear elasticity
theory.
An
efficient computational methodis
developed
to
evaluatethe
ellipticintegrals
that
arise.The
limitations
ofthis
solution areinvestigated
in detail
andit is
shownhow
the
method couldbe
extendedto the
sliding
elliptical1.
Introduction
1
1.1. What
are contact stresses?1
1.2.
Why
they
areimportant
1
1.3. Nature
ofthe
Applied
Loading
1
1.4.
The
Continuum
Model
3
1.5. The
Elastic Foundation Model
5
1.6.
Coordinate
System
For
Non-conforming
Single Point Contact
5
1.7. Milestones
in Contact
Stress
Development
7
1.8.
The Proposed Computational Method
8
2. Classification
of
Contact Stress Problems
10
2.1.
Relevant Factors
10
2.2.
The Rigid Punch
andOther Stiff
Geometries
10
2.3.
Elastic
Half-Spaces
11
2.4.
Rolling
Contact
12
2.5. Plastic
Deformation
13
2.6.
Conforming
Contact
14
2.7.
Numerical Methods
15
2.8.
Hertzian
Contact
16
2.8.1.
Elliptical
Contact: "The
General
Case"16
2.8.2.
Limitations
orBounds
ofthe
Hertz
Theory
17
2.8.3.
Extension
ofHertzian Contact
17
3. The
Geometry
of
Contact
19
3.1.
Local
Surface
Geometry
19
3.2. Combinations
ofBodies
22
3.3.
Magnitude
Checks
23
4.
Elasticity
Methods
27
4.1.
Equilibrium
27
4.2. Strain
at aPoint
28
4.3.
Compatability
Equations for
Linear Strain
29
4.4.
Hooke'sLaw
30
4.5. Stress
Functions
30
11
5.
Axisymmetric
Solids
of
Revolution
33
5.1. Stresses
andDeformations
in
aSolid
ofRevolution
33
5.2. Concentrated
Normal
Force
36
5.3. Distributed
Normal Loads
38
5.4. Spherical
Contact
41
5.5. Cylindrical
Contact
-Another Two-Dimensional
Case
48
6.
Elliptical Contact
50
6.1.
Surface
Geometry
for
Elliptical
Contact
51
6.2. Development
ofEquations
for
Elliptical
Contact
55
6.3.
Elliptical
Solution Overview
57
6.4.
An Elliptic Integral Primer
59
6.4.1. Complete
Elliptic Integrals
60
6.4.2.
Incomplete Elliptic Integrals
62
6.5.
Explicit Numerical Procedures
for
Normally
Loaded Elliptical
Contact
63
6.6.
Application
ofthe
10-Step
Method
to
Determine Maximum
Stress
Values
69
6.7. Contact Stresses
101 (Benchmark
Testing)
73
6.8.
The
Real Contact Problem
76
6.8.1. Surface
Displacements
77
6.8.2. Surface Stresses
77
7.
Practical
Applications
79
7.1.
Gaussian Profiles
andthe
Rusty
Nail
79
7.1.1.
On
Surfaces
andTheir
Statistical
Descriptions
79
7. 1
.2.Measurement Techniques
81
7.1.3.
Mathematical
Surface
Models
82
7.1.4. True Contact Area
84
7.2.
The Real
Structure
ofthe
Surface Layers
ofMetallic
Bodies
84
7.3.
Friction Between Real
Surfaces
85
7.3.1. The
Classic
Laws
ofFriction
85
7.3.2. Theories
ofFriction
86
7.3.3.
Rough
Surfaces
andFriction
87
7.3.4.
Design Tips
for
Friction Calculations
88
7.4.
Lubrication
andPitting
Failure
89
7.5. Impact
on aWorn
Surface
90
7.6.
Rolling
Contact
andShakedown
91
7.7.
Allowable
Stresses
92
7.8.
Heat
Treating
andContact Stresses
92
7.8.1.
Nitriding
93
7.9.
Gears
95
7.10.
Camrollers
96
7.11.
Wheel
andRail
97
8.
Summary
98
8.1.
On
the
useofthe
Continuum Model
to
Describe
Real Materials
98
8.2.
On
the
Elliptical Solution Implemented
in
this
Investigation
98
8.3.
Tangential
Loading
for
Elliptical
Contact
99
8.4.
Direction
for
Future Work
99
9. A Personal Note
101
Introduction
1
1. Introduction
1.1. What
are contact
stresses?Contact
stresses are causedby
the
pressure of one solid on another overlimited
areas of contact.They
aremerely
the
localized
stressdistributions
at and nearthe
surface of
the
body.
Contrast
this
to the
axial stress on a cylindricaltensile test
specimen
in
whichthe
engineering
stress representsthe
bulk behavior.
Even
there,
the
stressdistribution
normalto
the
cross-sectionis
not uniform whennecking
startsto
occur.
The
stresses onthe
surface ofabody
outsidethe
contactarea(s),
wherethere
are no appliedtractions,
mustbe
zerofor
equilibrium.This
is
aboundary
conditionfor
some solutions.Stresses
inside
the
contact area aremerely
the
internal
reaction ofonebody
accommodating
the
intrusion
ofanother.The
point wherethe
force is
applied moves a small amountin
responseto the
load.
This
occursbecause both
the
supporting
andcontacting
materials are notrigid
orfixed
in space,
but
have
finite
stiffnesses associated withthem.
As
aresult, the
bodies
are notnecessarily fixed
in
their
geometry
overtime.
Contact
stresses arelocalized
reactions,
sothat
Saint Venant's Principle
appliesto their
analyses.The
study
of contact stressesis
often avoidedbecause
the
mathematicsis difficult
anddoes
notlead
to
solutionsin
terms
offormulas
which canconveniently be
usedby
designers.
1.2.
Why
they
areimportant.
The
prematurefailure
ofmany
machine elements canbe
attributedto
excessively
high
contact stresses.In
somecases,
the
maximum stressdue
to
contactbetween
members
is
regarded as alimiting
criterion ofdesign. Inaccurate
calculation or neglect oftheir
effectsis
a commondesign
flaw.
Some
classic contact stress problemsinvolve
ball
bearings,
cylindricalrollers,
gearteeth,
and wheels on atrack.
The
loading
in
these
cases
is
often cyclic.Repeated
loading
is
relatedto
microscopicfailure
phenomena such ascracking, pitting,
and subsurfacefracture.
1.3. Nature
ofthe
Applied
Loading
The
method usedto
determine
contact stressesdepends
onthe
initial
contact geometry
andthe
appliedload.
Limited
cases of closed-form solutions areavailable,
some of which willbe
reviewedin
this
investigation.
Two-dimensional
solutions can oftenbe
Special
considerationis
givento
computation of stressinside
the
area of contact.The
normal andtangential
stressdistributions
aretypically
calculatedindependently
andthen
superimposed.The
normalforce
N
is
traditionally
assumedto
be
directly
proportional
to the
friction
ortangential
force
F,
withthe
constant ofproportionality
being
the
coefficientoffriction
1,
that
is
F
= /*N.(1.1a)
The
symbolsP
for
normalforce
andQ
for
tangential
force
arecommonly
usedin
the
contact mechanics
literature
and willbe
usedhere.
Equation 1.1a
whichfollows
the
notation
found in
introductory
physics and staticstextbooks, is
an oversimplification ofthe
relationbetween
normal andtangential
loading.
In
reality
the
normal andtangential
loads,
andthe
coefficient offriction,
aredistributed functions
overthe
contact area sothe
relationship
between
them
is
moreadequately
representedby
Q(x,y)
=M(x,y)
P(x,y).
d.lb)
If
adhesiveforces
atthe
interface
areneglected,
the
presence ofany
tangential
load
mustbe
associated with a normalload. For analysis,
it is
assumedthat there
is
nointeraction
orcoupling between
the
normal andtangential
force distributions
otherthan
that
givenby
Equation
1.1b.
Including
tangential
loading
in
the
analysisis necessary
for
a realistic model ofthe
contactbetween
machineelements, but
it significantly
in
creasesthe
complexity
ofthe
solutions suchthat
a computeris
required.The
contactgeometry
also affectsthe
form
ofthe pressuredistribution between
the
bodies
asin
the
cases ofline,
spherical,
and elliptical contact whichhave
uniform,
spherical,
and ellipsoidaldistributions,
respectively.Contact
stresses,
like
allstresses,
have
athree-dimensional
character(See Figure 1.1). Spherical
and cylindrical contact are often approximated astwo-dimensional
problemsto
simplify
the
analysis and yieldinsight into
the
overallbehavior.
Long
rollersin
contact(plane strain)
orthin
disks
(plane
stress),
willin
reality
experience end-effectsthat
will createthree-dimensional
stressdistributions.
The
presence offriction,
whichbreaks
any symmetry
ofthe
problemthat
wasdue
to the
geometry,
also necessitates athree-dimensional treatment.
'. figure 1.1 Differential
stress elementfor
threeIntroduction
1.4. The
Continuum
Model
You
arehere.
Figure 1.2
Family
of material models. Branchesof mechanics are not aclearly defined hierarchical treebuta more nebulous cluster of relationships andinterconnectionsthat overlap,liketheneurons thatcreatedthem.The
material modelfor
the
contact stress problemsdiscussed
throughout
this
investigation is based
onlinear
elasticity.It
borders
however
onplasticity
theory
in
determining
the
onset anddefinitions
ofyield,
whichis
of criticalimportance
to
designers.
The
three-dimensional
nature of contact stressestherefore
requires anunderstanding
of stress as atensor
quantity
andits
associated principal values(See
Figure 1.3).
The
principal stresses are usedin
conjunction with material propertiesto
determine
if
a givengeometry
can withstandthe
appliedloading
withoutyielding,
orif
yielding
does
occur,
its
extent.
Every
materialhas
different
deformation
response characteristics
to
appliedloads,
asr For1-3plane
Assume a\ >^>a^>0
"X
(c)
<
Viewsof element ondifferentprincipalaxes
-+-F
Rough
(o) Rigid
-PerfectlyPlaatlc
*|
Wfflr-IVWJM//W////AW/W>.
Rough
() Elastic-PerfectlyPlatte
|
WWV 1illustrated
by
a stress-straindiagram.
This
data is
typically
obtainedfrom
thetensile
test
of a circular rod.One
ofthe
tasks
ofthe
stress analystis
to
relatethe
stateofstressfor
this
simple configurationto
a more complexthree-dimensional
situation.The
effect ofattaining
a certain stresslevel depends
on
the
model ofthe
material.Figure
1.4
illustrates
afew
ofthe
commonly
usedidealizations
of stress-strain curves usedfor
calculating
plasticbehavior.
The
final
stress stateis
path-dependent
if
the stresslevels
gobeyond
the
material's elasticlimit.
This
meansthat the
sequence or orderin
whichthe
loads
are appliedthat
cause plasticdeformation
determines
the
final
stress state.The
framework
for
this
investigation is
the
realm of continuum mechanics andtheory
ofelasticity
(see
Figure
1.2).
The
determination
of contact stresseshas
its
rootsin
linear
elasticity
theory
whichis based
onthe
continuum model of materialbehavior.
The
continuum model assumesthe
materialto
be
continuous,
homogeneous,
andusually
isotropic. These
assumptions allowfield
quantities such as stress anddisplacement
to
be
expressed as piecewise continuous
functions.
The
earliest models of contact problems were analyzed as concentratedloads
appliedto
aninfinite
elastic medium.These
solutions provided
insight
into
the
overallbehavior
of concentratedloads,
but
contained singularities.Singularities
andthe
infinite
stresses anddeformations
associated withthem
are not possiblein
real materials.WS/S////AW//AV//AW//MW, Rough
() RigidLinearWorkHardening
i
WAVE,
|
M |MVWIv/)m>MJ>mm/ww/w/m
Rough
(rf) ElasticLinear WorkHardening
Figure
1.4 Continuummodels of materialbehaviorMost
materials exhibit astrong
temperature
dependence,
usually softening
withincreasing
temperature.
The
rate at whichthe
load
is
applied(strain rate)
can alsohave
an effect on
the
stress-strain curve.A
category
of materials exists calledvisco-elastic,
that
exhibittime-dependent
responsesto
stress.The
stress-strain curveis
a usefulidealization,
but in
reality
each material possesses a stress responsefunction
that
is
a multi-dimensional surfacedescribed
by
the
variablesstrain,
strainrate,
temperature,
andtime,
to
name afew. The
computational methoddeveloped
in
this
investigation
Introduction
1.5. The
Elastic
Foundation
Model
One
oftheearly
modelsdeveloped
to
analyze contact phenomena
treated
the
material
like
abed
of springs as shownin Figure 1.5.
This
wasdone
to
avoidhaving
to
solve anintegral
equationfor
pressure.
The bed
of springsis
presumedto
be
penetratedby
arigid
indenter. The
contact pressure atany
pointdepends only
onthe
compression ofthe
spring
atthat
point.Point
contacts orindentation
by
bodies
withvery
small radii are not modeledadequately because
there
is
no supportfrom
adjacentsprings.
The
model gives usefulfirst
approximationsto
problemsin
whichthe
bodies
cannot
be
locally
representedby
principal curvatures.This
modelhas
proved usefulin
analyzing rolling
contact withtangential
loading
and problemsinvolving
visco-elasticbodies [1]. Elastic foundation
type
models are sometimes usedin
concrete slabdesign
in
orderto
calculatethe
requiredthickness to
withstandbuilding
columnloads.
Figure 1.5 The
elasticfoundation
model.1.6.
Coordinate System For
Non-conforming
Single
Point
Contact
Before
we candiscuss any
particular method ofsolution,
it is
usefulto
define
a coordinate system which can serve as aframework
to
survey
the
entirefield
of contact mechanics.The
definitions
andfigures
in
this
section arefrom
Johnson
[1].
When
brought into
contact,
non-conforming
surfaces willinitially
touch
at a pointor
line if
one ofthe
bodies
is
cylindrical.The
contact areais
generally
assumedto
be
small compared
to
the
dimensions
ofthe
bodies
themselves.
The
origin ofthe
coordinate system
is
taken to
be
the
point of contact.The Z
axisis
taken to
coincidewith
the
common normalto the two
surfaces.The X-Y
planeis
calledthe tangent
plane.
The
undeformed shapes ofthe two
surfaces are specifiedby
the
functions:
zl
=f^x.y)
andZj
=f2(x,y).
The
separationbetween
them
before
loading
is
givenby:
h
=Figure 1.6
Generalcoordinatesystemfor
contact problems.In applications,
contactmay involve
complex motions such asthose that
occurbetween
gears andself-aligning
bearings. The
motion of abody
atany instant in
time
is
described
by
its
linear
and angularvelocity
vector with respectto the
contact point.The
following
terms
are usedfrequently
in
the
literature,
sothey
aredefined
here
with referenceto the
general coordinate system shownin
Figure 1.6.
Sliding:
relativelinear velocity between
the two
surfaces.Rolling:
relativeangularvelocity
between
the two
bodies
about an axislying
parallel
to the tangent
plane.Spin:
relative angularvelocity
aboutthe
common normal.M,<^
^
r>-M*JX
S > <jA
^V
\&
y^^^^s**^
^x25ffi2i
Z
Introduction
Figure 1.7
showsthat the
net tangentialforce
canbe
resolvedinto
two
componentsQx
andQy. The force
transmitted
atthe
point of contacthas
the
effect ofcompressing
the
deformable
solids sothey
effectively
make contact over an area offinite
size.This
makes
it
possibleto transmit
a resultant momentin
additionto
aforce
which could not occurif
contactwastruly
at a single point.The
componentsMx
andMy
aredefined
asrolling
moments and are part of what causes"rolling
resistance".The
componentMz
accounts
for friction inside
the
contact area andis
calledthe
spin moment.1.7. Milestones in Contact Stress Development
The
following
sectionhighlights
some ofthe
majorstepping
stonesto the
workin
this
investigation.
Significant
developments
areidentified
in
the
mathematicalformulation
and treatmentofthe
problem,
but
it is
by
no means an exhaustivesummary
of allthe
workin
the
field
of contact mechanics.Most
developments in
the
theory
did
not appear until
the
beginning
ofthis
century,
when neededby
the
railway, gear,
andbearing
industries.
Theoretical
developments
seemedto
have
stoppedin
the
midnineteen-sixties, due
to
lack
of computational powerto
carry
outthe
integral
solutions.Research
in
numerical methods continueshowever.
(1881)
Heinrich Hertz
[2]
invented
the
classicaltheory
of contact stressesin
his
paper"On
theContact of
Elastic
Solids".
At
age24,
Hertz
wasworking
as a research assistantto
Helmholtz
atthe
University
ofBerlin.
He
wasstudying
the
opticalinterferences
in
glasslenses
andthe
effect ofclamping forces
onthe
fringe
patterns.He
made ananalogy
between
contact pressure andelectrostaticpotentialtheory.
His
solution gaveonly
the
principal stressesin
the
contact areabut has
been
extended overthe
yearsto
cover a widevariety
of physicalcases,
atleast
as afirst
approximation andbenchmark.
(1930)
H.R.
Thomas
andV.A. Hoersh
[3]
transformed the
Hertzian
solutionfor
stresses onthe
axis ofsymmetry
into
standard ellipticintegrals
anddiscovered
that
the
shearing
stressdistribution
along
the
axishas
a maximum at somedistance beneath
the
contact area.This
showedthat
a method offailure
whichinitiated
below
the
surface,
such aspitting,
couldbe
explainedby
the
existenceofthese
maximum shear stresses.(1939)
G.
Lundberg [4]
consideredthe
effect of atangential
load between
arbitrary
surfaces.He
introduced
three
potentialfunctions corresponding
to the
components ofloading
along
the
axes of aCartesian
coordinate(1949)
R.D.
Mindlin
[5]
showedthat
the
solution ofthe tangential
and normalpressure
distributions
canbe
decoupled
withoutintroducing
significant error.The degree
of approximationis
ofthe
same order asneglecting
the
small sheartractions
in
the
Hertzian
problem withdissimilar
materials.
He
developed
the
theory
ofslip between
the
contact surfaces.An
undesirable characteristic ofhis
solutionis
that
the
traction
approaches
infinity
atthe
edges,
whichis
notphysically
possible.Presumably,
the tangential
component oftraction
cannot exceedthe
productof
the
coefficient offriction
1
andthe
normalload.
For
the
case of circular contact underspin,
it is
shownhow slip
penetratesfrom
the
outer radius
a,
to
aninner
radiusa',
andthat
in
the
included
annulus,
the
traction
remains atthe
greatest possible value oflp.
With
increasing
torque,
slip is eventually initiated
overthe
entire contact area.Where
there
is
noslip, displacements
onthe two
bodies
must match.(1951)
Cheng Kang
Liu
[6]
and alsoin
an oft-cited reference withJ.O.
Smith
[7]
investigated
both
normal and tangentialloads
that
were assumedto
have
an ellipsoidal(Hertzian)
distribution
overthe
contact area.The
magnitude of the
intensity
ofthe
tangentialload is
assumedto
be
linearly
proportional
to
that
ofthe
normalload
whensliding
motionis
impending.
The
stressesin
the
body
are presentedin
closedform
for
both
the
plane stress and plane strain problems.A
numerical value ofV3
wasassumed
for
thecoefficient offriction.
They
discovered
that
whenthe
tangential
loads
are applied atthe
contactarea, the
maximumshearing
stressmay be
atthe
surfaceinstead
ofbeneath it. This is
a mostimportant
resultin
that
it
explains real
failure
phenomenon such assurface crack propagation.1.8. The Proposed Computational Method
In
his
thesis
[6],
Liu
formulates
the
solutionto
the
three-dimensional problem withnormal and
tangential
loads in
terms
ofintegrals.
He
statesthe
needfor
afeasible
way
of
evaluating
the
integrals. The
computational power now existsto
performthese
calculations.
The
main portion ofthis
investigation
resultedin
computer programsto
evaluate
these
integrals
withinthe
framework
ofthe
contact stressproblem,
making
this
a
feasible
course of action.The
methoddeveloped
in
this
investigation is
based
onthe
notation and equationsfrom
Seely
andSmith
[8],
which were originatedby
Liu.
Seely
wasLiu's
thesis
Introduction
9
evaluated
by
numericalmethods,
which makesthe
calculation of contact stresses aninherently
numerical problem.The
programtreats
stress as atensor
quantity
to
reinforce
its
three-dimensional
nature,
whichis
so often overlooked.The
method ofdetermining
contact stressesby
evaluation ofthe
ellipticintegrals,
andits
implementation
as a computerprogram,
forms
the
central work ofthis
investigation.
The
computer programs usedto
implement
these
calculations couldbe
developed
into
atool to
be
usedin
productdevelopment,
failure
analysis,
and as apedagogical
tool
in
the
classroom as well.The
calculation ofcontact stresses
is
an2.
Classification
of
Contact
Stress Problems
2.1. Relevant Factors
There
aremany factors
to
consider whenmodeling
a contact problem.Problems
do
notalways
fit into
neat categories and there willbe
cross-overbetween
classifications.Some
of
the
relevantfactors
are asfollows:
o
Geometry:
Is
the
problemtwo
orthree-dimensional?If
two-dimensional,
is
it
plane stress or plane strain?Is
theresingle, multiple,
orconforming
(close-fit,
nearly contacting)
contact?What is
the condition of each surface? Are
they
rough orsmooth?o
Loading:
Are
there
normal or tangentialloads,
orboth? Is
theloading
cyclic?
What
is its
magnitude?Is it
a point ordistributed load?
o
Relative
motion:Does
rolling, sliding,
ortorsional
motion occurbetween
the
bodies,
oris
thereimpact?
o
Deformation: Are large
strainspresent,
asis
likely
with elastomers?Is
thereplastic
deformation?
o
Thermal
effects:Is it
a problem concernedprimarily
withheat
transferthrough
theinterface
ordoes
athermal
stressfield
needtobe
superimposedonthe
mechanically
imposed
stresses?o
Materials: Are
the
materialsisotropic,
anisotropic,
orpossibly
visco-elas-tic?o
Relative
stiffnessbetween
the
bodies:
Should it be
treated
as arigidpunch problem?All
ofthe
abovefactors
areimportant
in
determining
which solution methods are applicable
to a specific problem.For
the
purposes of thisinvestigation,
thefollowing
classifications
have
been found
to
be
useful.2.2.
The Rigid Punch
andOther Stiff
Geometries
Problems in
which onebody
has
asignificantly
higher
elastic modulusthan the
othercan
be
treatedas a"rigid
punch"
Classification
11
shapes
have been
studied such asblunt
ends, tapered wedges, cones,
and spheres(See
Barber
[9],
Galin
[10],
Gladwell
[11],
andNadai
[12]).
Tangential
loading
is
notusually
associated with
this type
of problem.I
/-Qy-r-rr/
-it
Figure 2.1 Rigidpunchindentation.
Another group
ofproblemsin
whichonebody
is
consideredrigidcompared to theotheris
the
rolling
of metals.These involve
thermaleffects,
asin
the case ofhot rolling
andplasticity
withwork-hardening
for
coldrolling
operations.2.3.
Elastic Half-Spaces
An
elastichalf-space is defined
as a semi-infinite elastic solidbounded
by
a planesurface. It is
onehalf
of aCartesian
space,
usually identified
withtheplusorminus z regions.However,
it is
often convenient to use polar coordinates with the origin centered at the point of contact.Deformations
aretaken
tobe
linearly
proportional to theforces. The
differential
equations of equilibrium andthe
compatibility
relationsfrom elasticity
areassumed to apply.
The
surface outsidethe
contact regionis free
ofstresses,
within theregion
it is loaded
by
the
prescribednormal andtangential
pressuredistributions. At large
distances
from
theloading
zone,
thestresses musttend tozero.The
elastichalf-space
idealization
amountsto
ignoring
the effects of one of thecontacting
bodies
with the purpose ofsimplifying
theboundary
conditions.Solutions
typically
giveinfinite
stresses at the point ofcontact,
which cannotphysically
exist,
but
areaproperty
ofthe
solution.The
overall stress patternshave been
verifiedby
photoelas-tic
andfinite
element methods.The
idealization
gives someusefulresults andin fact
forms
the
basis
for
more general methods.Tangential
and normalloads
for
line
and pointcontact
have been investigated
for
two
andthree-dimensional
cases.Figure
2.2 illustrates
2.4.
Rolling
Contact
Rolling
contact problems aretreated
as separate phenomena.Rolling
(contact)
is de
fined
as relative angular motionbetween
twobodies
about an axis parallelto
their common
tangent
plane.The frame
ofreferenceasdefined
in
section1.6 is
consideredto movewith
the
point of contact.If
the velocitiesV1
andV2
areunequal,
therolling
motionis
accompanied
by
sliding.If
theangular velocitiesozl
ando^
areunequal,
it is
accompaniedby
spin.The
terms
free
rolling
and tractiverolling
areusedto
describe
motionsin
whichthe
nettangential
force
Q
is
zeroandnon-zero,
respectively
[1].
In
steady
rolling,
the strainfield does
not change withtime.
The
resultant tangentialtraction
must not exceedits
limiting
value whichis
theproduct ofthe coefficient offric
tion
and the resultant normalforce.
Freely
rolling
bodies
having
dissimilar
elastic properties willdevelop
different
tangential strains.A
special caseinvolves
two elasticbodies
which aregeometrically
identical
andhave
the same elasticproperties.
That
is,
they
arecompletely
symmetrical abouttheir
interface. When
rolling
underthe action of a
purely
normalforce,
notangential tractionorslip
can
occur,
so the contact stressesand
deformations
canbe
approxi matedby
the staticHertz
distribution
[1].
b a
" dl
Pis ^r ~AW
' *.'
-\f ''_. B
\
C(x. 0)s
\
rAOr,z)
'' z
Figure 2.2 Distributednormal andtangentialloads.
Sliding
is
not as straightforward
since some portions ofthe
contact area
may
slip
or possessrelative
motion,
while the remainderdoes
not and stickstogether.
A difference between
thetangential
strainsin
the
twobodies
in
the
sticking
arealeads
to a small apparentslip,
called creep.Sticking
andmicro-slip
zonesform
in
the contact areain
relative proportions andlocations
that aredetermined
by
the
interaction between
friction
forces
and elasticdeformations.
To determine
the
stressesin
the
body,
anEulerian
point ofviewis
taken
in
whichthe
material
is
consideredto
move pastthe
point of contact.The
equilibrium of surface elementsis formulated in
terms
oftheir
velocity
vectorswhichhave
componentsfrom
the
strain rates andthe
velocity
ofthe
bodies
as awhole.This
technique
allowsthe
differences
in
surface strainsto
be
accountedfor,
which give risetoslip.The
boundary
conditionsfor
the
strain-deriveddifferential
equations of equilibriumare,
for
steady rolling
contact:Classification
13
2)
Tangential
traction
is limited
by
the
coefficient offriction.
3)
Direction
oftangential
tractionmust opposeslip.These
conditions aremodified(meaning
increased
complexity)
to
accountfor
tractiverolling,
anddiffering
amounts ofslip from
completeslip
to
none.They
become
quite complexfor
three-dimensional
bodies
withtraction,
spin,
andtransient
behavior occurring
during
start-up.For
visco-elasticrolling, the
problems of compression androlling-sliding
mustbe
distinguished,
even whenfriction is
absent,
due
to the
time-dependence of the stress-strainlaw.
Rolling
contact will notbe
coveredfurther
in
thisinvestigation. It
was mentionedfor
completeness andtohelp
illustrate
thecomplexities associated with contact problems.2.5. Plastic
Deformation
Problems
involving
plasticdeformation
require specialtreatment
because
the
final
stress state
is
path-dependent.This
statedepends
onthe
material modelused,
i.e. perfectly
plastic, elasto-plastic, etc.,
and ontheworkhardening
modelused(if
any).See Mendelson
[15]
for
theories
onkinematic
andisotropic
hardening. Follansbee
andSinclair
[16]
have
studiedtheindentation
of aball
wellinto
thefully
plasticstate.Such
workcouldbe
usedtodevelop
an accurate model ofhardness
testing.The
initial
phases of a standardhardness
test
canbe
treated
as a classic contact stress problemup
to
thepoint ofplasticdeformation.
An
experimentaltest stand shownin Figure
23
couldbe built
to measure theforce
anddeflection
of anindenter
asit
waspressedinto
a material.It
wouldbe
setup for
automaticdata
acquisitionenabling
the testdata
to
be
correlatedto
the theoretical model.Such
a system could alsobe
used to test variousindenter
shapes and sizes as well asfor
the
analysis of rigid punch phenomenaby
using
sharp-edgedindenters. A holographic
stress analyzer could recordthe
fringe
patterns of surfacedeflection
in
realtime
andthey
couldthen
be
correlated withtheoretical
predictions.PC
BASED
DATA
AQUISITIDN
LINEAR
TRANSDUCER
MDTDRIZED
DR
HYDRAULIC
PRESS
LDAD
CELL
CHANGABLE
INDENTDR
TIPS
?F
VARIDUS
SHAPE, SIZE,
AND
HARDNESS.
TEST
SPECIMEN
RIGID
BASE
2.6.
Conforming
Contact
Conforming
contact arisesfrom
thegeometric conditionin
which the twobodies
are separatedby
a smalldistance
over appreciable portions oftheir
surfaces.Here,
thegeometry
before
and afterloading
is known
ahead oftime.
For light
loads,
thecontact area willbe
smallin
relationto
the radii ofthebodies.
As
theload becomes
larger,
the contactarea grows
rapidly
to
become
asignificantfraction
ofthe total
surfacearea,
which violatesthe
Hertzian
assumptions.Such
a condition canbe
moresuitably
treatedby
methods appropriatetoconforming
contact.This is
an example ofhow
the magnitude oftheload
can
determine
the
applicable solution method.Examples
ofconforming
contact are acylinder
in
atightfitting
hole,
initially
contacting
along
aline,
and a spherein
a sphericalcavity
wherethe
magnitude of the radii of thebodies
arevery
close.For
these simple geometries atlight
loads,
thestresses anddeformations
predictedby
Hertzian
theory
are accurate.As
theload is
increased,
the stressesin
theconforming
case willbe lower
because
thesupporting
areaincreases
at afaster
rate than predictedby
Hertzian
theory.The deformations
willbe
smallerbecause
oftheadditional support offeredby
thesecondbody.
Numerical
methods are neededto
solveconforming
contact problems.Paul
andHashemi
[17]
have
studied contact pressures onclosely conforming
elasticbodies
andhave developed
a numerical methodfor frictionless
surfaces.Their
workincludes
atechnique
for
automatically generating
meshes thatoverlay
theload-dependent
contactpatches.
The
following
is
anoutline ofthemethod:A
Cartesian
coordinate systemis
setup,
with theinitial
contact point asthecommon origin.
The
initial
separationbetween
points onthe twobodies
is known. The
effect at each pointresulting
from
the
deformation
ofneighboring
points,
is
weightedby
aninfluence function
and summed up.Using
indenters
of prescribedfinite
curvature,
afictitious interpenetration
is
generated.The bodies
arediscretized into
subregions and a system oflinear
equationsis
setup
that
determines
thedeformations
from
thepenetration at
neighboring
pointsby
superposition.Stress
evaluation points aretakento
be
atthecentroids ofthecells.If
boundary
conditions are notsatisfied,
a newpenetration curve or contactboundary
is
generated.This is
done
iteratively
untilsatisfactory
convergence occurs.Finite
element programs areusedto
generatethe
interpenetration
curves.The
restrictions ofthemethodinclude
the assumptions that thecontactregionis
assumedto
be
symmetricalabout one axisin
the tangent plane, the
initial
contactis
at a singlepoint,
Classification
15
Figure 2.4 BlanketandContact Area froma numerical method
by
SinghandPaul.2.7.
Numerical
Methods
Numerical
methodstypically
involve
discretization
of thedomain. Figure 2.4 is
an exampleof a numerical method
by
Singh
andPaul
[18]
in
whichthe
pressurefunction
p(x,y)
is
replaced
by
a piecewise constantpressure
field.
Note
the
large
gradients near the edges ofthe
grid.They
report that thesimply-discretized
methodis numerically
unstable
in
the general case.Instability
arisesbecause
thesolution vector to the set of
linear
algebraic equationsis
very
sensitiveto
small perturbationsin
the elements ofthecoefficient matrix.Large
oscillationsin
the solution vector correspondto
small variationsin
the elements of the coefficient matrix.Since
perturbations are unavoidablein
the process ofcreating
the grid,
convergence to thesolutionvector
tends to
be very
erratic.This
discrete
methodis incapable
ofpredicting
theproper stress
distribution in
non-symmetric problems.For
non-symmetriccases,
stabilizing
techniques were
introduced
whichthey
call the"Redundant Point Field
Method"and the
"Functional Regularization Method". Both
ofthese
significantly
increased
theamount ofcomputation required.
As
a refinement ofthe
procedure techniques needto
be
found
to
eliminatethe
singularitiesoccurring
nearthe
edges ofthegrid.On
the
otherhand,
the
large
scale solutionis very
good andfriction
effects are accountedfor.
Other
numerical solutionsinclude finite
element methods.A
commercially
availablecode
that
handles
three-dimensional contacthas been recently developed [19]. The
drawbacks
to
the
finite
elementmethod,
based
onthe
amount ofmemory
requiredfor
available commercial programs
to
run andthe
size oftheir
data
files,
arethatit:
o
is
computationally
extensive.o
does
notreadily
lead
to
parameterizationstudies,
althoughparametrically
generated
FEA
models couldbe
generated.o calculates stresses and
deformations
throughout
theentirefield
when,
during
initial design
phases,
only
criticaldesign
parameters are sought such asorders ofmagnitude or maximum values of stress at a particular
location
etc.
2.8. Hertzian Contact
The
pioneering
work ofHertz
[2]
includes
theclassic contact stress solution and wasthe
first
theoretical
workdone
in
thisarea.Elastic
contact stress problems areclassifiedasHertzian if
they
satisfy
thefollowing (five)
conditions:1)
The
bodies
arehomogeneous, isotropic,
obey
Hooke's
Law,
and experience small strains androtations,
i.e.
smallstrain elasticity.2)
The
contacting
surfaces arefrictionless.
3)
The dimensions
ofthedeformed
contact patch remainsmall comparedto theprincipalradii oftheundeformed surfaces.
4)
The deformations
arerelated to thestressesin
thecontactzonesas predictedby
thelinear
theory
ofelasticity
for half
spaces.5)
The
contacting
surfaces are continuous andmay
be
representedby
second-degree
polynomials(quadratic surfaces)
priorto
deformation.
The majority
of work on contact stressis based
on the assumption that the contact regionis
theellipse predictedby
Hertzian
analysis.The
equationsfor
circular contact areas willbe developed later in
thisinvestigation
tofamiliarize
readers with theproblem.These
solutions can
be
expressed as simpleformulas
sothegeneral concepts andbehavior
canbe
illustrated before
proceeding
to
the more general case of elliptical contact areas whichis
the
centraltopic
ofthis
investigation.
2.8.1. Elliptical
Contact:
"The
General
Case"The
mostgeneralcasehas
nosymmetry
aboutthesurface normalto the tangentplane.Tangential
loading
alsodestroys
thesymmetry
of the problem.Major
resultsfor
thegeneral case of
Hertzian
contact are asfollows:
o
The
contact areais bounded
by
an ellipse which canbe
calculatedfrom
thegeometric configuration:
the
principal radii ofthebodies
and the relative angular orientation oftheprincipal planes.o
The dimensions
ofthe ellipse,
a andb,
increase
directly
as the cube root ofthe
load P.
Classification
17
2xab
o
Regions
ofthe
solidswhichareremotefrom
thecontactzone approacheachother
by
an amount whichvariesasP( \o
The
principal stresses are all compressive.The
maximumshearing
stress occursbelow
thesurface.Note
the non-lineardependence
on theload
of the contact area anddeflection. The
same
formulas
hold for both
solidsusing
the appropriatevalue ofPoisson's
ratio,
v.See
section
5.2
onSpherical Geometries for
general numerical conclusions.Thomas
andHoersh
[3],
andLundberg
[4]
show that variations ofPoisson's
ratioin
the usualengineering
rangedo
nothave
astrong influence
on theimportant features
ofthe stress pattern.It
may
still affectthemagnitudeoftheresults,
so the propervaluesshouldbe
usedfor design
problems.Special
cases ofthegeneralHertzian
problem arethose of sphericaland cylindrical contact.
The
equationsin
these
simple casesdo
notinvolve
ellipticintegrals,
however
thepresenceoffriction
greatly
increases
theircomplexity.2.8.2. Limitations
orBounds
ofthe
Hertz
Theory
The Hertz
theory
has been
confirmedby
numerous experiments.Haines
andOllerton
[20]
reportthat the
Hertz
theory
accurately
predictsthe
shearstressesfor
elliptical contact wherethe
semi-major axis of the ellipse of contactis
aslarge
as one-half the smallest radius of curvature of either ofthe
contacting
solids.The
geometric predictions of thetheory
cannotbe
expectedto
be
accuratewhenthedeviations
from
the
originalhypothesis
arethis
large. Beyond
theelasticlimit,
someoftherelationscontinue tobe
approximately
valid,
but
thedeviation
increases
withthedegree
ofdeparture
from linear
elasticity.2.83.
Extension
ofHertzian
Contact
Several
departures
from
the
originalhypotheses have been
developed,
including
higher-order
polynomialstomodeltheinitial
geometry.The
polynomial corrections are onthesameorder of magnitude as
the
assumptions ofthe
linear
elasticity
theory
itself
so thisis
not a productiveavenue,
exceptfor
cases ofconforming
contact.Dissimilar
materialshave
alsobeen
studiedand some parametersdeveloped
to
accountfor
therelative stiffnessbetween
the twobodies. Contact
of rough surfaceshas been
modeledby
assuming
that the
bodies
are covered with anarray
ofhemispherical
protrusions called asperities.This is
anattempt
to
determine
the
true contact area and reliesheavily
on statistical methods.For
Attempts
have
been
madetoincorporate friction
in
the
Hertzian
results.The
so-calledSmith-Liu Equations
[7]
solve the two-dimensional cylindrical problem with tangentialloading.
The
solutiondoes
notcontainellipticintegrals,
but
the
computations arestillvery
tedious.
Analytical
solutionshave
been developed
for
sliding
spherical contactby
Goodman
andHamilton
[21]
which are morelike
explicitly-specified procedures ratherthansimple
formulas.
In
thisinvestigation
a numerical methodis defined
as onein
which thedomain is
decomposed
into discrete
regions orsubstructures,
versus a computationalone which evaluates thestress
field
atany
continuous coordinatebased
onthe continuumGeometry
of
Contact
19
3.
The
Geometry
of
Contact
3.1. Local
Surface
Geometry
Two
bodies in
contact are presumedto
touch
initially
at a single point.The
curvatureof each
body
is
modeledby
two
radii,
the
principal andsecondary,
which are associated withthe
maximum and minimum surface curvatures ofthe
body
atthe
contact point.
The
planescontaining
the
maximum and minimum curvatures are orthogonal.When
two
bodies
areconsidered,
the
principal planes of each will notnecessarily
coincide sothe
anglebetween
the
planes of principal curvature mustbe
considered.
The
completegeometry
cantherefore
by
specifiedby
four
radii andthe
angular orientation
between
the
principal axes.The
angle of orientation ais
meaningless
if
either one ofthe
bodies
is
axisymmetrical, in
which caseit is
assigned avalue of 0
for
calculation purposes.Negative
radiiindicate
that the
center of curvaturefor
that
principal planelies away from
the
body,
i.e. it is
a concave surface.The
classification of a given
geometry
andits
subsequent mathematicaltreatment
depends
on
the
sign and relative magnitude ofthe
four
radii.'. Figure 3.1
Body
with positive principal andsecondary
radii of curvature.The
following
is
a rationalefor
the
use oftwo
radiito
describe
the
local
surfacegeometry.
In
modeling
acontinuum,
it
canbe
assumedthat
the
surfacehas
acontinuous
curvature,
that
is,
there
arenodiscontinuities in
the
region nearthe
contact point.Mathematically,
this
meansthat the
slopes mustbe
continuous at all points onthe
surface.The
simplest continuousfunctions
that
satisfy
this
requirement are second orderpolynomials,
sinceby
taking
their
secondderivative
with respectto
displacement,
Figure
3.2
Local curvaturedoes
notnecessarilyrepresenttheoverall shape of a
body.
locally
describe
a surfaceleads
to
expressions
having
similarform
but
containing
moreterms.
This
approachis
used
in
problemsinvolving
conforming
contact
[22].
There
is
abranch
of mathematicscalled
differential
geometry
in
whichphysical quantities such as
length
take
oninfimtesimal
values.Differential
geometry
is
the
study
of geometricfigures using
the
methods of calculus.A
well-knowntheorem
statesthat
any
surface can
be
locally
characterizedby
two
principal radii.This
abstractionis
acceptable
for
contact stressanalysis,
since we are
only
concerned withlocal
effects nearthe
point of application ofthe
load.
A
surfacein
E3(three-dimensional
Euclidean
space)
is
uniquely determined
by
certainlocal
invariant
quantities calledthe
first
and secondfundamental
forms.
These
quantities
depend only
onthe
surface and not the particular representation(coordinate
system).
Another
differential
geometry
theorem
statesthat:
For
every
pointP
on asurface,
there
exists a coordinate patchcontaining
P
suchthat the
directions
ofthe
uand v parameter curves are principal
directions.
See Lipschutz
[23]
for
more onthis.
Gaussian curvature,
anotherinvariant,
is
the
product ofthe
principal andsecondary
curvatures of
the
body. While
it is
not usedin
the
determination
of stresses anddisplacements,
it
couldbe
a useful characterization ofthe
surfacefor
possible use as a variablein
adimensional
analysisstudy
ofball
bearing
failure
rates.The
theorems
andderivations
ofdifferential
geometry
do
notplay
a rolein
the
actualdetermination
ofcontact stresses.
The
point ofmentioning
them
is
to
showthat
a surfacedescribed
locally by
two
curvaturesis
notjust
a physical convenienceintroduced
to
solvethe
problem,
but
alsohas
a sound mathematicalbasis.
Figure
3.2
illustrates
that
the
bodies
themselves
canbe
quitearbitrary
andirregular.
It
is
easierto
visualizethe
contactif
you project or extendthe
local
radiiwhich characterize
the
surfaceto
create a complete object.Various
combinations ofnumeric sign and magnitude of
the
principal andsecondary
radii canbe
thought
of asrepresenting different bodies
such as spheres and cylinders.Eight
types
ofthese
bodies
can
be
distinguished
asdefined in
Table
3.1.
These
are notnecessarily
the
overallshape of
the
bodies in
contact,
althoughthey
couldbe.
If
the
radiithat
characterizethe
surfaceat
any
given pointareextended,
they
wouldform
wholebodies in
these
shapes.The
curvaturemay be completely different
at another point onthe
surface ofthe
body,
but it
can notbe
drastically
different if
it is in
the
vicinity
ofthe
contact point.The
Geometry
of Contact
21
Body
Type
Principal
Radius
R
Secondary
Radius
R'Visualize
I
+
+
Football
II
+
-Hyperboloid
III
--Elliptical Crater
IV
+
equalsR
Sphere
V
-equals
R
Spherical Seat
VI
+
00Cylinder
VII
- 00Cylindrical
Trough
VIII
00 00Plane
Table
3.1
Body
Types aredefinedby
thesignand relative magnitude oftheprincipal radii.The
needfor
this
classification arosein
the
computerimplementation
ofthe
analysisof contact stresses.
Certain
cases or combinations ofthese
"bodies" require specialmathematical
treatment
to
avoiddivision
by
zero and other computer-relatedpeculiarities.
The
needto treat
certain geometries as special casesis
not mentionedanywhere
in
the
literature.
Many
authorsdevelop
integral
equationsto
solvefor
contactstresses
but
mentionnothing
abouthow
to
implement
them,
whichintroduces doubt
asto
whetheror notthey
were ever usedto
actually
calculate anything.Figure
3.3
Body
TypeI
Figure 3.4
Body
Type IIFigure 3.7 The
TorusorDonutFigure
3.8
Body
Type VHIThe
most generalbody,
one with unequal positive principalcurvatures,
is
termed"Body
Type
I"and
is
illustrated in Figure
3.3.
The
inverse
ofthis
is
both
curvaturesbeing
negative as seenin
Figure
3.5.
Body
Type
II
shownin
Figure
3.4
is
characterizedby
one positive and one negative radius.Figure
3.6
showsBody
Type
IV,
the
convex sphere.The
simplestbody
type
is
a sphere with a radius of one unit.Body
Type
V,
the
concavesphere,
is
realized whenboth
radii are equal and negative.This
type
of surface couldbe
producedby
aball
end mill.The
torus
shownin Figure
3.7
is
not one ofthe
body
types
itself,
but
the three
pointsA, B,
andC
can eachbe
represented
by
adifferent
one.The
torus
wasincluded
to
showthat
the
local
curvatureshould not
be
confused withthe
geometry
as a whole.Body
Type
VIII,
shownin
Figure
3.8,
is
"The
Plane" andis
characterizedby
both
radiibeing
infinite.
When
oneof
the
bodies
is
a plane or sphericaltype,
the
angle abecomes irrelevant due
to
symmetry.3.2. Combinations
ofBodies
Although
there
areno restrictions onthe
values ofthe
radii on anindividual
body,
other
than
being
non-zero,
there
are restrictions when twobodies
are considered.Certain
combinations of radii and angular orientation produce geometriesthat
arephysically
impossible
for
a single-pointcontact problem.The
following
figures
provide a graphicillustration
of some ofthe
combinations ofbody
types.
When
two
cylinders are placedin
contact,
they
may
produce elliptical orline
contact
depending
onthe
relative angular orientation.Figure
3.9
showsthe
caseofline
contact
between
cylindersin
which case ais 0.
A
special case occurs whentwo
cylinders of equal
diameter
are crossed at90,
producing
a circular contact area.An
experimental apparatus such as
this
canbe
usedto
test
coefficients offriction
andwear-rates
between
various materialsbecause
the
area canbe easily
predicted andthe
sliding
Geometry
of Contact
23
this
caseis
notthe
same asthe
spherical case of equal area and normalforce,
because
the
secondary
radii areinfinite.
Consider
anarbitrary
point onthe
surfaceofthe
solid nearthe
contactpoint.A
spherecontacting
another sphere or a plane willboth
produce circular contact areas.Now
move somedistance
outsidethe
contactarea,
keeping
a constant z elevation.In
the
first
case oftwo
spheres,
this
location is
outside either ofthe
bodies
while,
in
the
second caseit
remains onthe
surface of
the
plane.The
stressdistributions
cannotbe identical because
there
is
not a one-to-onemapping
ofthe
geometries.The
maximum normal pressure and stresses onthe
centerline shouldbe
similarbetween
the two
caseshowever.
Figure
3.9
Contacting
CylindersLine
contact can occurif
a cylindrical or planarbody
type
is explicitly
selected orthe
eccentricity
ofthe
elliptical contact areais
solarge
that
contacteffectively becomes
a rectangle.
The
circular andline
contactcases are simplerthan the
general casein
that
they
it do
notdepend
on ellipticintegrals.
The
fact
that
the
elliptical solutionasymptotically
approachesthe
closed-form circular andline
contact solutions makesfor
a goodbenchmark
test
of a"general
method".A
feature
ofthe
line
contact problemis
that
it
cannotbe
normalized(i.e.
mappedonto
the
rangefrom
0<R<1)
because
ofthe
infinite
radiusdefining
a cylinder or plane.To
normalize aproblem,
allthe
radii aredivided
by
the
magnitude ofthelargest
radius which thenitself
becomes
unity.In
line
contact,
the
infinite
radius wouldmap
allthe
other radiito
zero.Certain
values ofthe
four
radii andthe
angular orientation canbe
specified which correspondto
physically impossible
geometries.For example,
abody
with a positive radius cannotbe brought
into
single point contact with abody
having
a negative radius of smaller magnitude thanthe
positive one.This
wouldbe
aforce fit.
A
mathematical solution mightbe
obtained,
but it
wouldbe
incorrect
to
apply
the
resultsto
adesign
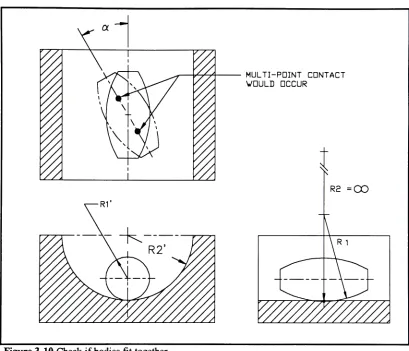
problem.Geometries may
alsobe
specifiedthat
arephysically
possiblebut
violatethe
assumptions ofthe
theory,
such asthe
case ofconforming
and multi-point contact.3.3.
Magnitude Checks
Potentially
invalid
geometries can occur whenany
one ofthe
four
radiitakes
on a negativevalue,
i.e.
possesses concave curvature.Negative
curvaturesoccurring
in
the