Rochester Institute of Technology
RIT Scholar Works
Theses
7-26-2018
Smoothed Particle Hydrodynamics
Tanmayee Gupte
tmg9722@rit.edu
Follow this and additional works at:https://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please contactritscholarworks@rit.edu.
Recommended Citation
R.I.T
SMOOTHED PARTICLE
HYDRODYNAMICS
Tanmayee Gupte
A Thesis Submitted in Partial Fulfillment of the
Requirements for the Degree of Master of Science in
Astrophysical Sciences & Technology
School of Physics and Astronomy
College of Science
Rochester Institute of Technology
Rochester, NY
ASTROPHYSICAL SCIENCES AND TECHNOLOGY
COLLEGE OF SCIENCE
ROCHESTER INSTITUTE OF TECHNOLOGY
ROCHESTER, NEW YORK
CERTIFICATE OF APPROVAL
M.S. DEGREE THESIS
The M.S Degree Thesis of Tanmayee Gupte has been
examined and approved by the thesis committee as
satisfactory for the thesis requirement for the M.S.
degree in Astrophysical Sciences and Technology.
Dr. Joshua Faber, Thesis Advisor
Dr. Jason Nordhaus, Committee Member
Dr. Nathaniel Barlow, Committee Member
Date
Abstract
Smoothed particle hydrodynamics (SPH) is a meshfree particle method based on a
Lagrangian formulation, which has been widely applied to different areas in astrophysics
involving complicated fluid dynamical processes. For the first part of this project we have
expanded an existing smoothed particle hydrodynamic code (StarCrash). We have added
different time integration methods and used them to study the code’s overall ability to
conserve energy. In the second part we have evaluated the StarCrash code’s ability to use
different numerical treatments to perform shock tube simulations via Sod’s shock tube
test. We have used different evolution schemes involving either the energy or the entropy
of the system, along with different artificial viscosity formulations, and compared the
results from the numerical simulations with the analytical solution.
Contents
Certificate of Examination ii
Abstract iii
List of Figures vii
1 Introduction 1
2 Smoothed Particle Hydrodynamics 4
2.1 Difference between Eulerian and Lagrangian methods . . . 4
2.2 Advantages and disadvantages of smoothed particle hydrodynamics . . . 5
2.3 Theoretical development of SPH . . . 6
2.3.1 Lagrangian hydrodynamics . . . 6
2.3.2 The SPH kernel interpolation . . . 7
2.3.2.1 Interpolating function values . . . 7
2.3.2.2 Approximating derivatives . . . 9
2.3.2.3 The kernel function . . . 9
2.3.3 The “vanilla ice” SPH equation . . . 9
2.3.3.1 Momentum equation . . . 9
2.3.3.2 Energy equation . . . 11
2.3.4 Different evolution techniques . . . 11
3 Smoothed Particle Hydrodynamics code - StarCrash 13 3.1 Basic equations used in StarCrash . . . 13
3.1.1 Artificial Viscosity . . . 14
3.1.1.1 Monaghan . . . 14
3.1.1.2 Hernquist and Katz . . . 14
3.1.1.3 Balsara . . . 15
3.1.2 First law of thermodynamics . . . 15
3.1.3 The gravity solver . . . 16
3.1.4 Leap-frog technique . . . 17
3.1.5 Relaxation . . . 17
3.2 Number of Neighbours . . . 17
4 Numerical integration techniques 18 4.1 Euler’s Method . . . 19
4.2 Leap Frog . . . 20
4.3 Runge - Kutta Second order (RK2) . . . 21
4.4 Runge - Kutta Fourth Order (RK4) . . . 21
4.5 Conservation of energy . . . 22
5 Shock Tube 25 5.1 Physical description of the shock tube problem . . . 25
5.2 Analysis of the shock tube problem . . . 25
5.3 Euler equation of gas dynamics . . . 26
5.4 Exact solution . . . 28
5.5 Artificial Viscosity . . . 28
6 Artificial Viscosity 30 6.1 Artificial Viscosity . . . 30
6.1.1 Standard SPH Viscosity . . . 31
6.2 New form of AV technique . . . 32
7 Results and Analysis 34 7.1 Analysis . . . 34
7.1.1 Shock tube without AV . . . 34
7.1.1.1 Entropy evolution technique without AV . . . 34
7.1.1.2 Energy evolution technique without AV . . . 35
7.1.2 Shock tube with AV . . . 36
7.1.2.1 Entropy evolution technique with AV . . . 36
7.1.2.2 Energy evolution technique with AV (Standard SPH method) 36
7.1.2.3 Energy evolution technique with AV (2nd Method) . . . 37
7.2 Results . . . 38
7.2.1 Shock tube without AV . . . 38
7.2.2 Shock tube with AV . . . 38
8 Conclusions and Future Work 39
8.1 Conclusions . . . 39
8.2 Future Work . . . 40
Bibliography 41
List of Figures
2.1 Difference between Eulerian and Lagrangian methods . . . 4
2.2 Sketch of the interaction of a particle a, with its neighboring particles.
Kernels having a finite support (shown by shaded region) are used to
prevent computationally expensive interaction of each particle with all the
other particles. The support size of a particle a is set as a multiple, Qhi,
of its smoothing length,hi. Often,Q = 2 is used, specifically that of cubic
spline (Rosswog, 2015). . . 8
4.1 Comparison between the time evolution techniques: Leap frog, Euler, RK2
and RK4 where h is the same . . . 22
4.2 Comparison between the time evolution techniques: Leap frog, RK2 and
RK4 . . . 22
4.3 Plots of position of the binaries in the xy plane at t = 3,6,9,12,15,18,21,24,30,
dynamical time used for comparing different time integration methods. For
these figure we have integrated the system using Leap Frog integration
method . . . 24
5.1 Schematic diagram of Shock tube problem . . . 26
5.2 Exact solution of Sod’s Shock tube test, Density versus position at t = 0.2. 28
5.3 Exact solution of Sod’s Shock tube test, Velocity versus position at t = 0.2. 28
5.4 Exact solution of Sod’s Shock tube test, Pressure versus position at t = 0.2. 28
7.1 Plots of density, velocity and pressure versus position for entropy evolution
technique without AV at t=0.2 . . . 35
7.2 Plots of density, velocity and pressure versus position for energy evolution
technique without AV at t=0.2 . . . 35
7.3 Plots of density, velocity and pressure versus position for entropy evolution
technique with AV at t=0.18 . . . 36
7.4 Plots of density, velocity and pressure versus position for energy evolution
technique with AV using standard SPH equations at t=0.18 . . . 37
7.5 Plots of density, velocity and pressure versus position for energy evolution
technique with AV using SPH methods inspired from Riemann solvers at
t=0.18 . . . 38
Chapter 1
Introduction
Many astrophysical systems have been shaped by complicated fluid dynamical processes,
e.g., hot gas in galaxy clusters, the formation of stars, and the internal structure of
galax-ies. They involve complex physical processes such as magnetic fields, nuclear burning and
usually lack symmetry. For these systems, an analytical treatment is not possible and
one must use a numerical approach.
A good numerical method will conserve various physical quantities like energy and angular
momentum. Along with it, fixed boundary conditions are usually absent, leading to
dynamically changing flow geometries. Therefore, high spatial adaptivity is a must for
their computer simulations. Hence a good choice of numerical method fulfilling the earlier
requirements is needed.
Smoothed Particle Hydrodynamics (SPH) is a particle-based Lagrangian Method
in-vented by (Lucy, 1977) to simulate nonaxisymmetric phenomena in astrophysics. It
is a method used for calculations involving self-gravitating fluids moving freely in 3D.
It has been used to study many astrophysical systems, including large scale structure,
galaxy formation, tidal disruption of stars by massive black holes and also coalescing
com-pact binaries. Coalescing comcom-pact binaries are considered as the most promising sources
of Gravitational Waves for detection from laser interferometers (LIGO, VIRGO, GEO,
TAMA). The first gravitational wave detection (B.P. Abbott et al., 2016), provided a
major new confirmation of Einstein’s theory of general relativity and the first direct proof
of existence of black holes. Compact binaries could consist of binaries of neutron stars
2 Chapter 1. Introduction
(NS) and black holes (BH), for example NS-NS, BH-NS or BH-BH. The merger of a
neutron star binary has recently been detected and is considered one of the most
impor-tant detections of Gravitational Waves (GW) as it was followed by an electromagnetic
counterpart. During the last stages of the merger of the NS, the binary begins a
transi-tion towards a rapid plunge inward, eventually leading to a merger. After passing this
point, semi-analytical methods cannot be used to describe the dynamical evolution as it
becomes too complicated due to the changing geometries and rapidly evolving metric and
hydrodynamic configuraton. Numerical simulations have been used to model coalescing
binary neutron star mergers and study the corresponding GW emission using SPH, e.g.,
the work of (Faber et al., 2004) and (Rasio and Shapiro, 1992). Other compact binaries
may also merge in ways that introduce important hydrodynamical effects with observable
consequences. Binary black holes can have mini accretion disks around them. Previous
study shows the exchange of gas between the two disks and development of spiral shocks
within the mini-disks when the binary BH separation is in the relativistic regime (Bowen
et al., 2017). SPH can also be used to study the hydrodynamics of the mini-disk.
One of the most intriguing phenomena in astrophysics is the gravitational recoil that
occurs as an after-effect of a merger of a system of binary black holes. It is caused by
asymmetric emission of gravitational radiation, causing a net overall momentum in the
remnant black hole and giving it a ‘kick’. It is possible to model the recoil using numerical
simulations which are supported by observational evidence. SPH has been used to study
recoiling black holes in presence of an accretion disk and has been applied to model the
behavior of a hydrodynamical accretion disk around a black hole binary just after the
merger (Ponce, 2011) and the kick delivered to the black hole on the evolution of the disk.
SPH could also be used for modeling the ejecta from a more complex system of binary
black holes orbiting in the presence of a disk, for example the blazar OJ287 (Valtonen
et al., 1999). Such a system is assumed to consist of a large supermassive black hole
viewed directly down the jet axis. Since we see only the jet and not the surrounding disk
of the blazar, SPH can be used to numerically model the blazar and study its properties.
The primary aim of this project is to understand the working of the SPH code StarCrash
3
astrophysical systems (for example compact objects like neutron stars and black holes).
The following section summarizes the theoretical development of Smoothed Particle
Hy-drodynamics followed by a brief description of the SPH code (StarCrash). Section 3 will
describe the implementation of a shock tube, which is used as a test for the validation of
the different artificial viscosity schemes added into the SPH code. Different time-stepping
methods have been added of various orders of accuracy to the code. The various methods
are discussed in section 4. Section 5 gives a brief discussion on the shock tube problem in
1D. Section 6 includes the various artificial viscosity techniques implemented in the SPH
code. Result and analysis of the schemes mention in section 6 are presented in section 7.
The last section will summarize the conclusions drawn from the analysis carried out and
Chapter 2
Smoothed Particle Hydrodynamics
2.1
Difference between Eulerian and Lagrangian
meth-ods
Smoothed Particle Hydrodynamics (SPH) was invented to simulate nonaxisymmetric
phenomena in astrophysics (Lucy, 1977) and (Gingold and Monaghan, 1977). It is
a pure Lagrangian based method i.e. a particle based method, in contrast to Eulerian
methods which are grid based methods. The main difference between the two methods
is related to the derivatives. In the Eulerian picture derivatives are calculated at a fixed
point in the space, on the other hand in the Lagrangian description they are calculated
[image:13.612.182.406.544.661.2]in a coordinate system attached to a moving fluid element.
Figure 2.1: Difference between Eulerian and Lagrangian methods
2.2. Advantages and disadvantages of smoothed particle hydrodynamics5
2.2
Advantages and disadvantages of smoothed
par-ticle hydrodynamics
Advantages
• SPH imposes no arbitrary finite boundary on the numerical simulation and
there-fore matter is not lost or forced back into the simulation at domain boundaries,
inherently conserving the mass of the system.
• Large voids and highly distorted flows occur during impacts or mass transfer in
gas dynamics. As SPH follows particles, computational time and memory is not
wasted by keeping track of large number of empty cells as in Eulerian scheme (Benz
et al., 1990). Hence SPH offers higher computational efficiency than grid-based
calculations.
• The fluid evolution history is intrinsically simple to trace due to the particle-like
nature. In grid based codes, one would require including tracer particles to follow
the flow of the fluid.
• Another advantage of SPH is accomplishment of fluid advection even for stars with
a sharply defined surface like NS as particles follow their trajectories in the flow.
Tracking of hydrodynamic ejection of matter to large distances from central dense
region is also easy with SPH.
• Particle nature makes coupling to N-body or self-gravity physics relatively
straight-forward.
Disadvantages
• In SPH one must build and constantly update neighbour lists (by linked-lists or
binary trees) in order to evaluate particle summations.
• The initial conditions can be influential on the eventual outcome and therefore one
must decide on whether to set particles on a cubic, hexagonal or random lattice
6 Chapter 2. Smoothed Particle Hydrodynamics
• Lastly in SPH resolution is limited by particle number, which is fixed at the start
of the simulation, whereas in theory a grid can be sub-divided indefinitely.
2.3
Theoretical development of SPH
2.3.1
Lagrangian hydrodynamics
As mentioned earlier SPH is a purely Lagrangian approach, where the derivatives are
calculated in a coordinate system attached to a moving fluid element. The time derivative
in the Lagrangian approach (d/dt) is related to the Eulerian derivative ∂/∂t by
d dt =
dxi dt
∂ ∂xi +
∂
∂t =~v· ∇+
∂
∂t, (2.1)
where x/,(i= 1,2 and 3) is position and~v is the velocity, when applied to the continuity equation in the Eulerian approach
∂ρ
∂t +∇ ·(ρ~v)= 0, (2.2)
using equation (2.1) for taking the derivative of ρ (density) one finds in the Lagrangian
form
dρ
dt = −ρ∇ ·~v. (2.3)
The conservation of momentum equation in the Lagrangian forms becomes
d~v dt =−
∇P
ρ + ~f. (2.4)
Equation 2.4 shows that apart from forces like magnetic fields or gravitation included in
the quantity ~f, the fluid gets accelerated by pressure P gradients. Similarly the energy
equation can be derived from the first law of thermodynamics and equation (2.3)
du dt =
P
ρ2
dρ dt =−
P
2.3. Theoretical development of SPH 7
2.3.2
The SPH kernel interpolation
In this section, the discrete form of continuous Lagrangian hydrodynamics equations
will be discussed. As mentioned earlier, in the SPH method the interpolation points
“particles” move with the local fluid and the derivatives are calculated with a kernel
approximation without finite differencing. Therefore the partial differential equations
(PDEs) of Lagrangian fluid dynamics are converted into ordinary differential equations.
In order to conserve the physical quantities by construction in the PDEs, they need to
have correct symmetries in the particle indices. The “Vanilla ice” version of SPH has
this symmetry (Rosswog, 2009).
2.3.2.1 Interpolating function values
The kernel function is a key parameter of SPH, and defines how many particle neighbours
we care about when calculating fluid properties. With the help of, kernel function we can
interpolate particle properties from the neighbouring particles. The main idea of SPH
can be explained by the kernel approximation in which a function f(~r) is approximated
by
~
fh =
Z
f(~r)W(~r−~r0,h)d3r~0, (2.6)
whereW is called smoothing kernel andh is the smoothing length, which determines the
rate of radial decay. The functionf is integrated over all other fluid elements at positions ~
r0. The above integral is formulated into a summation over a set of interpolation points
throughout the medium, (the SPH particles). It means we can estimate the function f
for some particle at~r by a weighted sum of that samef evaluated at every other particle
8 Chapter 2. Smoothed Particle Hydrodynamics
Figure 2.2: Sketch of the interaction of a particlea, with its neighboring particles. Kernels having a finite support (shown by shaded region) are used to prevent computationally expensive interaction of each particle with all the other particles. The support size of a particle a is set as a multiple, Qhi, of its smoothing length, hi. Often, Q = 2 is used,
specifically that of cubic spline (Rosswog, 2015).
In order to recover the original function the kernel should fulfill, in limit of infinitely
small smoothing region
lim
h→0 ~
fh(~r)= f(~r) and
Z
W(~r−r~0,h)d3~
r0= 1, (2.7)
The integral can be written as
~
fh(~r)=
Z
f(~r)
ρ(~r)W(~r−r~
0,h)ρ(r~0)d3~r0, (2.8)
which after replacing the integral by a sum over a set of interpolation points (particles)
whose masses are mj, gives
f(~r)=X
j
= mj
ρj
fjW(~r−r~0,h). (2.9)
Equation 2.9 can be used to get the density as
ρ(~r)= X
j
2.3. Theoretical development of SPH 9
The density estimation (equation 2.10) given by summing up kernel weighed masses in
the neighbourhood of point~r plays a crucial role in the derivation of Lagrangian SPH
derivations. It satisfies the continuity equation and therefore conserves mass of the
system.
2.3.2.2 Approximating derivatives
The derivatives can be calculated by taking equation 2.9 and we get
∇f(~r)=X
j mj
ρj
∇W(~r−r~0,h), (2.11)
where the exact derivative of the approximated function is used, where Wi j is given by
∇Wi j =eˆi jwi j,eˆi j is the unit vector going from particle b to particle a, i.e. eˆi j =~ri j/ri j and
~ri j =~ri−~rj
2.3.2.3 The kernel function
SPH usually uses radial kernels withW(~r−r~0,h)= W(|~r−r~0|,h).The kernel should also be
smoothly differentiable (at least singularly) and be an odd function and≥0 in all space.
In most SPH simulations standard cubic spline SPH kernel is used (Monaghan, 1992)
and is also used by StarCrash. In 3D the cubic spline is given as
W(q)= 1 πh3
1− 32q2+ 43q3 for 0≤q≤1
1
4(2−q)
3 for 1<q ≤ 2
0 for q >2,
(2.12)
where q=|~r−r~0|/h . Since this kernel only depends on the absolute value of|~r−r~0|, it is
radial.
2.3.3
The “vanilla ice” SPH equation
2.3.3.1 Momentum equation
The following derivations of conservation of momentum and energy are derived from the
10 Chapter 2. Smoothed Particle Hydrodynamics
Spatially discretizing equation (2.4) gives
d~vi dt = −
1 ρi X j mj ρj
Pj∇iWi j, (2.13)
this form will solve the Euler equation but does not conserve momentum. The force on
particle a by particle b is given by
~
Fji=
mi d~vi
dt
j
= −mi ρi
mj
ρj
Pj∇iWi j, (2.14)
and the force on particle b due to particle a is
~
Fi j =
mj d~vj
dt
i =
−mj ρj
mi
ρi
Pi∇jWji = mi
ρi mj
ρj
Pi∇iWi j. (2.15)
As Pi ,Pj, by construction Newton’s third law is not fulfilled (Every action has an equal
and opposite reaction), and total momentum is also not conserved. However if we start
by the following equation instead of equation (2.4), momentum gets conserved
∇ P
ρ
= ∇ρP −P∇ρ
ρ2, (2.16)
if one solves for ∇P/ρ and applies the gradient formula, equation (2.11), the momentum
equation gets converted to
d~vi dt = −
X
j mj
P
i
ρi2 + Pj
ρj2
∇iWi j. (2.17)
As the part of the equation having the pressure term is symmetric and ∇iWi j = −∇jWji,
the forces are equal and opposite. By construction the total momentum and angular
momentum is conserved. Thus we have a system of ODEs which have been used to
2.3. Theoretical development of SPH 11
2.3.3.2 Energy equation
Spatially discretizing the energy one obtains,
dui dt =
Pi
ρi2 dρi
dt = Pi
ρi2 d dt
X
j
mjWi j
= Pi
ρi2
X
j
mj~vi j· ∇iWi j. (2.18)
Equation (2.10), (2.17) and (2.18) are the complete set of SPH equations. An alternate
form of the energy equation can be derived on using the “thermokinetic” energy eˆi =
ui + 12vi2 instead of specific internal energy ui. This equation will allow a smoother
transition to the relativistic equations. The following evolution equation
deˆ
dt = −
1
ρ∇ ·(P~v), (2.19)
can be converted to
deˆ
dt = − P
ρ2∇ ·(ρ~v)−~v· ∇ P
ρ
, (2.20)
On applying equation (2.11) to equation (2.20) this becomes
deˆi dt =
X
j mj
Pi~vj ρi2
+ Pj~vi
ρj2
· ∇iWi j. (2.21)
The above form of energy equation is useful as it is similar to the relativistic equation.
If one is dealing with artificial viscosity (AV) additional terms need to be added to the
equation (2.21). Artificial viscosity is used for handling shocks. The equation is given by
deˆi dt =
X
j mj
P
i~vj
ρi2
+ Pj~vi
ρj2 + Πi j
(vi+vj)
2
· ∇iWi j, (2.22)
where Πi j is the artificial viscosity (AV). See chapter 6 for more on AV formalism and
tests.
2.3.4
Different evolution techniques
The system is evolved using energy if one uses equation (2.22). The advantage of using
12 Chapter 2. Smoothed Particle Hydrodynamics
• conservation of energy
• allowing shock capturing technique if one adds artificial viscosity to the equation.
Another method of evolving the system is by using entropy change. The change in
entropy is given as
dAi dt =
Γ−1 2ρΓ−1
i
X
j
mjΠi j(~vi−v~j)· ∇Wi j (2.23)
where Ai is defined in the polytropic equation of state Pi = AiρiΓ and Γ is the ratio of
specific heats. The given evolution scheme (equation 2.23) is used in the code StarCrash.
The advantage of using entropy change techniques are
• pressure is always numerically positive
• the second law of thermodynamics is automatically satisfied.
Both the schemes imply conservation of total momentum and total energy (Rasio, 1991)
Chapter 3
Smoothed Particle Hydrodynamics
code - StarCrash
In this project we have used the SPH code StarCrash, which is a parallel based
hy-drodynamics code originally developed by Rasio and Shapiro to study merging binaries
(Rasio and Shapiro, 1992, 1994, 1995), and parallelized by Faber and Rasio for use in
post-Newtonian calculations of coalescing neutron stars (Faber and Rasio, 2000; Faber
et al., 2001; Faber and Rasio, 2002). In the following chapter, the basic equations and
features of StarCrash are briefly discussed.
3.1
Basic equations used in StarCrash
The basic formulation of the SPH equations used in the code StarCrash is summarized
in this section. The SPH density used in StarCrash is calculated using a slightly altered
formula as opposed to equation (2.10). The density of particle ‘i’ is given as
ρi =
X
j mj
W(|~ri−~rj|,hi)+W(|~ri−~rj|,hi)
2 , (3.1)
where~ri is the actual position of the particle i and W is the Kernel function. The code
uses the “gather-scatter” algorithm, i.e., for each particle-neighbor pair, it counts half of
the density contribution to the particle, and half to the neighbor. The Kernel function is
defined such that it drops to zero at a radius equal to 2 smoothing lengths. The Kernel
14 Chapter 3. Smoothed Particle Hydrodynamics code - StarCrash
function is given by equation (2.12). The pressure at~ri is calculated by
Pi = AiρiΓ, (3.2)
where Ai is the specific entropy function at ~ri. The hydrodynamical part of the force is
calculated by
~
Fihydro =−
X
j mimj
Pi
ρi2 + Pj
ρj2
+ Πi j ∇iWi j. (3.3)
This form has the advantage of being computationally convenient while at the same time
fulfilling a natural set of conservative laws.
3.1.1
Artificial Viscosity
In the code StarCrash three different kinds of artificial viscosity schemes are are
intro-duced. The user has the option of using a suitable scheme
3.1.1.1 Monaghan
For artificial viscosity a symmetrized version of the form proposed by (Monaghan, 1989)
is adopted
Πi j =
−αµi jci j+βµi j2
ρi j
, (3.4)
where ρi j = (ρi +ρj)/2 and ci j = (ci+cj)/2 (ci is the sound speed given as ci = (ΓPi/ρi)
1 2
and
µi j =
(v~i−v~j)·(r~i−r~j)
hi j(|~ri−r~j|2/hi j2+η2), when (~vi
−v~j)·(~ri−r~j) < 0
0, when (~vi−v~j)·(~ri−r~j)≥0,
(3.5)
with hi j = (hi + hj)/2, representing a combination of von Neuman-Richtmyer artificial
viscosity and bulk viscosity.
3.1.1.2 Hernquist and Katz
A second form of AV (Hernquist and Katz, 1989) used in the code calculates Πi j from
3.1. Basic equations used in StarCrash 15
Πi j =
qi
ρi2 +
qj
ρj2 if (~vi−v~j)·(~ri−r~j) <0,
0, if (~vi−v~j)·(~ri−r~j)≥0,
(3.6)
where
qi =
αρicihi|∇ ·~ ~v|i+βρihi2|∇ ·~ ~v|2i if (~∇ ·~v)i<0,
0, if (~∇ ·~v)i ≥0,
(3.7)
and
(∇ ·~ ~v)i =
1 ρi
X
j
mj(v~j−v~i)·~∇Wi j (3.8)
3.1.1.3 Balsara
A third form of AV technique used in StarCrash was developed by (Balsara, 1995) given
by
Πi j =
p
i
ρi2 + pj
ρj2
(−αµi j+βµ2i j), (3.9)
where
Πi j =
(v~i−v~j)·(r~i−r~j)
hi j(|~ri−r~j|2)/hi j2+η2
fi+fj
2ci j if (~vi−v~j)·(~ri−r~j) <0,
0, if (~vi−v~j)·(~ri−r~j)≥ 0.
(3.10)
In this equation fi is the function defined by
fi =
|~∇ ·~v|i
|~∇ ·~v|i+|~∇ ×~v|i+η0ci/hi
, (3.11)
the factorη0 = 10−5 is used to avoid divergence and
(∇ ×~ ~v)i =
1 ρi
X
j
mj(~vi−v~j)×∇~Wi j. (3.12)
3.1.2
First law of thermodynamics
There are two methods for evolving a system using SPH. As mentioned in section (2.2.3)
we can evolve the system using energy and hence conserve energy and momentum, in
16 Chapter 3. Smoothed Particle Hydrodynamics code - StarCrash
use entropy for evolving the system. The first law of thermodynamics at position ~ri is
given by
dAi dt =
Γ−1 2ρiΓ−1
X
j
mjΠi j(~vi−v~j)· ∇iWi j. (3.13)
Both the methods are used for different reasons. The advantage of using entropy
evo-lution is, that the entropy will never decreases with time. Since the kernel W(r,h) is a
monotonically decreasing function of r, the right hand side of the equation is positive as
Πi j>0when (~vi−v~j)·(~ri−r~j)<0and is zero otherwise. On the other hand the positivity
of the internal energyui is not guaranteed, when equation (2.18) is used and can lead to
large errors. However there are disadvantages in using the first law of thermodynamics
when time dependent smoothing lengths are used. It can lead to errors in conservation of
total energy. The use of time dependent smoothing lengths is necessary to ensure correct
spatial resolution throughout a calculation. As the fluid expands and contracts the local
values of hi must continually adapt so that number of neighbours NN for any particle
remains constant with time.
3.1.3
The gravity solver
The SPH method requires a very large number of particles to provide accuracy. Therefore
a direct summation method to calculate the gravitational field of the system is ruled out.
StarCrash uses a grid-based method for calculating the gravitational field of the system.
The values of source term for the Poisson equation is calculated by the definition of
density given by ρi =PjmjWi j. The gravitational potential and force for each particle is
calculated by FFT convolution. According to Newton’s Law the Gravitational Potential
is given by
φ(~r)= Z
ρ(r~0)d
3(~r0)
|~r−r~0| =
X
i mi
|~r−~ri|
. (3.14)
The direct sum would require N2 operations and is computationally expensive. The
integral can be converted in a form of convolution
φ(~r)=FFT−1×
FFT(ρ)∗FFT 1
3.2. Number of Neighbours 17
whereFFT−1 denotes the inverse Fast Fourier Transform. In order to use the convolution
technique, the data is imported to a 3-dimensional grid.
3.1.4
Leap-frog technique
The time evolution techniques are integrated using the Leap Frog method. Please see
section (4.2) for more details.
3.1.5
Relaxation
A common problem faced by SPH codes is that the initial configuration of the system
may not be in an equilibrium and the resulting oscillations can lead to misleading results.
Therefore the SPH code StarCrash introduces a routine that relaxes the material
config-uration before computing a dynamical run. A drag term is added to the forces calculated
by standard techniques
d~v dt =~a−
~v trelax
, (3.16)
where trelax is the relaxation time that roughly corresponds to the dynamical time given
by1/√Gρ.
3.2
Number of Neighbours
The number of neighbours used for each particle is a very important in calculation of
forces. The level of numerical noise is directly related to the number of neighbours NN,
as the noise level increases on increasing NN (Rasio and Shapiro, 1992). We can obtain
a higher level of accuracy only when we increase the number of particles N as well as
NN. The NN need to increase faster than N so that the smoothing length hi decrease
(Rasio, 1991). However the spatial resolution is proportional to 1/NN1/d ind dimensions.
Therefore, for a given calculation the choice of parameter NN will have to be imposed by
Chapter 4
Numerical integration techniques
When we are simulating an astrophysical system, made of N number of particles, we
need to solve Ordinary Differential Equations (consisting of particle positions, velocity,
acceleration, entropy etc). Very rarely can these equations be solved analytically and
one must use numerical approximation using discretized methods. In this chapter we
will be discussing the different numerical methods that have been implemented in the
code StarCrash. The following numerical methods are designed to approximate
well-posed initial value problem
y0 = f(t,y), y(t0)= y0, y∈Rd, (4.1)
such that there exists a unique solutiony(t,t0,y0)that satisfies (4.1) in the interval[t0,t0+
T∗], 0<T∗ ≤ ∞. A discrete set of y-values, yn, n = 0,1.... can be constructed using
discretisation methods given by (4.1), in such a manner that yn should be approximated
at a corresponding set of t values (tn) with spacing h called time steps. Discretization
methods are broadly classified as implicit methods and explicit methods. Briefly, an
explicit method obtains the successive values of yn+1 parametrically in terms of given or
previously computed quantities and is represented symbolically in the form
yn+1 = H(f,tn, ....tn+1−m,yn, ....yn+1−m). (4.2)
4.1. Euler’s Method 19
and an implicit methods definesyn+1 as the solution of an equation
G(f,tn, ....tn+1−m,yn, ....yn+1−m)=0. (4.3)
Given a numerical value y0 these methods take the form
yn+1= yn+h r
X
i=1 γiy
0
n,i, n=0,1... (4.4)
where
y0n,i = f(tn+αih,yn+h r
X
j=1
βi jy0n,j) and αi = r
X
j=1
βi j, (4.5)
if βi j = 0 forj ≥ i, the method is explicit, otherwise the method is implicit. The main
idea behind these methods is to get a better approximations of y(tn+1) by sampling the
vector field f(t,y) at r points near the solution curve originating from (tn,yn). A better
estimate is provided of the solution curve and therefore later samples can also be chosen
more usefully. In the next sections we will introduce four different numerical methods of
different orders. The leap frog method was incorporated into the code StarCrash. For
my project we have added three more explicit methods namely Euler and Runge Kutta
methods (second and fourth order). The number of the order is defined by the error on
the order of h to that number. For example, second order method will have errors, on
the order of h to the second power.
4.1
Euler’s Method
Euler’s method is the most elementary of the first order methods used for solving ODE’s.
Euler’s method approximates the derivative in equation (4.1) by using finite difference
y0(t)≈ y(t+h)−y(t)
h , (4.6)
where the independent variable is discretized in equal increments.
20 Chapter 4. Numerical integration techniques
Approximate values of the dependent variable are given by arranging the difference
quo-tient
yn+1 =yn+h f(tn,yn) n=0,1,2.... (4.8)
Euler’s method can also be derived from equation (4.4) by using r = 1, γ1 = 1 and β11
= 0.
4.2
Leap Frog
The leap frog method is the numerical integration method that is used in the code
StarCrash. One can derive the equations of leap frog by using taylor expansion of a
function yn+1 =y(tn+h) to second order in h
y(tn+1)=y(tn)+hy0(tn)+
1 2h
2
y00(yn,tn)+O(h3), (4.9)
with
y0(tn+1/2)=y0(tn)+(h/2)y00(yn,tn), (4.10)
can be rewritten as
y(tn+1)= y(tn)+hy0(tn+h/2)+O(h)3. (4.11)
Thus the derivative y0 needs to propagate at the intervals t(n+1/2) = tn+h/2, i.e between
the integer - labelled points of the independent variabletn = t0+nhused for the variable
‘y’. One can use
y0(tn+3/2)= y0(tn+1/2)+hy00(yn+1,tn+1). (4.12) On combining equation (4.11) and (4.12) we get,
y0n+1/2 =y
0
n−1/2+hy
00
n, (4.13)
yn+1= yn+hy 0
4.3. Runge - Kutta Second order (RK2) 21
4.3
Runge - Kutta Second order (RK2)
The Euler method as given by equation (4.8), which advances the solution through an
intervalh and uses derivative information only at the beginning of the interval. Runge
-Kutta method of the second order, uses a “trial step” at the midpoint of the interval. It
uses the values at the midpoint to calculate the solution at the end of the interval. RK2
is an explicit method. Consider the ODE
dy
dt = f(y,t) (4.15)
the second order estimate for yn+1 is given by
k1 = h f(yn,tn)
k2 = h f(yn+ k1
2,tn+
h
2)
yn+1 = yn+k2 (4.16)
where h=tn+1−tn
4.4
Runge - Kutta Fourth Order (RK4)
Higher order RK methods can also similarly be built by using same technique. For
example the fourth order RK method which is also an explicit method. The numerical
solution to the equation (4.15) can be calculated as follows
k1 = h f(yn,tn)
k2 = h f(yn+ k1
2,tn+
h
2)
k3 = h f(yn+ k2
2,tn+
h
2)
k4 = h f(yn+k3,tn+h)
yn+1 = yn+ k1
6 +
k2 3 +
k3 3 +
k4
22 Chapter 4. Numerical integration techniques
4.5
Conservation of energy
We have incorporated the different time evolution techniques in the code StarCrash to
determine which technique is the best for conserving energy. We start with a binary
equal mass star system on a hyperbolic trajectory. The units are G = M = R = 1. The
radius and mass of the stars is 1 with separation between them 4. The following figure
[image:31.612.171.426.229.395.2]show a comparison between the four different time evolution techniques.
Figure 4.1: Comparison between the time evolution techniques: Leap frog, Euler, RK2 and RK4 where h is the same
[image:31.612.171.423.474.646.2]4.5. Conservation of energy 23
After looking at Figure 4.1 and Figure 4.2, we can conclude that Euler is not a good time
evolution technique as compared to Leap frog, RK2 and RK4. While the other three
give comparatively similar results with regards to conservation of energy. It is possible
to get even better conservation of energy by using the proper initial conditions and/or
reducing the time steps. The following figures will show the evolution of stars which we
24 Chapter 4. Numerical integration techniques
Chapter 5
Shock Tube
The Shock tube is a Riemann problem and also a computational fluid dynamics problem
that has been of interest for many reasons. Firstly it offers a framework to solve nonlinear
hyperbolic systems of partial differential equations. Secondly, as the exact analytical
solution is known, it can be used as a difficult test for numerical methods dealing with
discontinuities.
5.1
Physical description of the shock tube problem
The shock tube can be described fundamentally as follows: consider a long one
dimen-sional tube closed at both the ends and divided in half by a thin diaphragm. Each of
the two regions are filled with the same gas but different thermodynamical properties
(pressure, density and velocity). The region with highest pressure is called as thedriving
section and the region with lowest pressure is called as the working section. The gas is
initially kept at rest and when the diaphragm breaks, a high speed flow is generated in
the working section.
In the following section we will go into a more detailed analysis of the shock tube problem.
5.2
Analysis of the shock tube problem
As shown in figure (5.1) let us consider that the left part of the shock tube is the part
with the higher pressure having pressure, density and temperature as (PL, ρL,TL) and
similarly the right side of the tube having the following parameters of pressure, density
26 Chapter 5. Shock Tube
Figure 5.1: Schematic diagram of Shock tube problem
and temperature (PR, ρR,Tr) with PL > PR. At time t = 0, the diaphragm breaks,
generating a process which would physically try to equalize the pressure in the entire
tube. The gas in the high pressure region will expand and flow into the working section
through an expansion (or rarefaction) wave pushing the gas of this part. The rarefaction
is a continuous process and takes place in a well defined region that propagates to the
left. The compression of the low pressure gas generates a shock wave propagating to
the right. We can assume that the expanded gas is separated from the compressed
gas through a fictitious membrane called the contact discontinuity that is travelling to
the right at a constant speed. The physical functions defining the tube namely pressure,
density, velocity and temperature are discontinuous across the shock wave and the contact
discontinuity. These will be discussed in the later section.
5.3
Euler equation of gas dynamics
Let us consider a mathematical description of the shock tube problem. In order to do this
we will assume that the tube is infinitely long, neglect viscous effects and the diaphragm
is completely removed at time t = 0. Using these simplifying hypotheses the compressible
flow in the shock tube can be described by one dimensional system of PDEs (Hirsch, 1988;
LeVeque, 1992) ∂ ∂t ρ ρU E | {z } W (x,t) +∂∂ x ρU
ρU2+p
(E + p)U | {z }
F(W)
5.3. Euler equation of gas dynamics 27
where density is ρ and the total energy is E. The total energy is given as
E= p
γ−1+ ρ 2U
2. (5.2)
For an ideal gas the equation of state is given as
p= ρRT, (5.3)
where the thermodynamic properties of the gas are described by the gas constant R
divided by molecular mass andγ is the specific heat of the gas. The local speed of sound
a, Mach number M and total enthalpy H is described by
a= pγRT =
s γP
ρ, (5.4)
M = U
a, (5.5)
H = E+ p
ρ =
a2
γ−1 + 1 2U
2. (5.6)
If we consider the column vectors of unknowns W =(ρ, ρU,E)t the Euler system of
equa-tions can be written as
∂W
∂t +
∂
∂xF(W)= 0, (5.7)
with the initial conditions (we denote by x0 the abscissa of the diaphragm):
W(x,0)=
(ρL, ρLUL,EL) x≤ x0
(ρR, ρRUR,ER) x≥ x0,
(5.8)
The mathematical analysis of the Euler system of PDE’s has the form
∂W
∂t +A
∂W
28 Chapter 5. Shock Tube
with the Jacobian matrix
A=
0 1 0
1
2(γ−3)U
2 (3−γ)U γ−1
1
2(γ−1)U
3−U H H−(γ−1)U2 γU.
(5.10)
This gives the description of the Shock tube problem in the mathematical form.
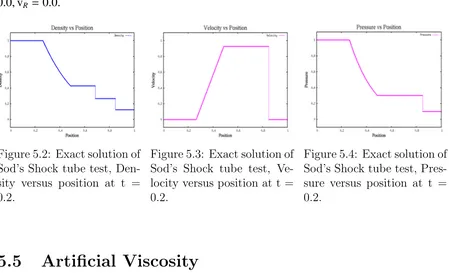
5.4
Exact solution
The following figures show the exact solution of the shock tube problem. The code used
to produce the plots has been originally written by Bruce Fryxell. The length of the tube
is 1. The conditions used for the shock tube are ρL=1,PL= 1,vL=0.0, ρR = 0.125,PR =
[image:37.612.173.427.106.171.2]0.0,vR =0.0.
[image:37.612.75.524.318.591.2]Figure 5.2: Exact solution of Sod’s Shock tube test, Den-sity versus position at t = 0.2.
Figure 5.3: Exact solution of Sod’s Shock tube test, Ve-locity versus position at t = 0.2.
Figure 5.4: Exact solution of Sod’s Shock tube test, Pres-sure versus position at t = 0.2.
5.5
Artificial Viscosity
When we treat the shock tube problem numerically, we see a lot of oscillations in the
numerical solution of the density/velocity variation with position (see section 7.1.1).
These oscillations can be damped by adding a supplementary term to the conservative
form of differential equations of the shock tube (5.7)
∂W
∂t +
∂
∂xF(W)−δx
2 ∂
∂x
D(x)∂W ∂x
5.5. Artificial Viscosity 29
where δx is given by 1/(M − 1) The mathematical form of this term called artificial
viscosity is inspired by the heat equation. We have discussed further on numerical AV
Chapter 6
Artificial Viscosity
6.1
Artificial Viscosity
In gas dynamics, discontinuous solutions or “shocks” can result even from perfectly
smooth initial conditions, which are nearly common in astrophysical system. Due to
the presence of physical viscosity, solutions are always smooth on length scale of gas
mean free path. On the other hand, the very steep gradients appear as discontinuous on
macroscopic scale of simulations (which is usually orders of magnitude larger).
Shocks can be dealt in two ways: (i) we can either make use of analytical solution of
a Riemann problem between two adjacent cells or particles or (ii) we can add
pseduo-microscopic terms that create entropy at shock-front, which will imitate the effect of
physical viscosity but on a scale that is numerically resolvable. The second way can be
used by adding extra “artificial” viscosity to the flow i.e. adding pressure like terms to
the fluid equations (Hernquist and Katz, 1989).
The solutions to ideal hydrodynamic equations (1.3 -1.5) can not include real
disconti-nuities with their infinite derivatives. The aim of artificial visocity (Von Neumann and
Richtmyer, 1950) is to introduce (artificial) dissipative terms into the equations in order
to give the shocks a thickness comparable to the spacing (of the grid points). Then the
corresponding differential equations can be used for the entire calculation, as if there are
no shocks in the system. The aim of artificial viscosity is not to imitate physical viscosity.
Instead it is introduced as an ad hoc method to produce on a resolvable scale, results of
6.1. Artificial Viscosity 31
small scale effects that are unresolvable.
There are a number of properties that are desirable of an AV scheme (Caramana et al.).
It must not introduce unphysical effects and should always be dissipative i.e, transfer
energy into internal energy. It should be able to distinguish uniform compression from a
shock and go to zero when compression vanishes. It should also be absent for expansion.
Lastly it must be able to conserve energy, momentum and angular momentum so that it
can be used formulated into SPH formulation.
6.1.1
Standard SPH Viscosity
An approach to incorporate artificial viscosity has been introduced by (Monaghan, 1989)
which is the most widespread form of AV scheme used in SPH. It has been discussed in
subsection (3.1.1.1) and has been used in the code StarCrash. We are discussing it in
detail over here as other forms of AV methods (that we have implemented as a part of
this project) have been developed through this scheme.
In this approach we increase the hydrodynamic pressure Pi in terms of momentum
equa-tion (2.17) by artificial contribuequa-tionΠi j
Pi
ρi2 + Pj
ρj2
!
→ Pi ρi2
+ Pj
ρj2 + Πi j
!
(6.1)
The bulk viscosity contribution toΠi j is of the formc1csh/ρ ∂v/∂xand a Taylor expansion
of the velocity field v(xi+(xj−xi)) gives
∂v
∂x
!
i
= vj−vi xj−xi
+O
(xj−xi)2
(6.2)
gives a SPH, bulk viscosity contribution
Πi j,bulk=
-c1
~cs,i j
~ρi j for xi jvi j <0 0 otherwise
,where µi j =
~hi jxi jvi j
x2i j+~h2i j
(6.3)
c1 is a parameter of the order unity and cs is the sound speed. The term xi jvi j detects if
32 Chapter 6. Artificial Viscosity
The total artificial viscosity (with the von-Neumann-Richtmyer term) is given as
Πi j = Πi j,bulk+ Πi j,NR =
−α~ci j+βµ2i j
~
ρi j for xi jvi j <0 0 otherwise
,where µi j =
~hi jxi jvi j
x2i j+~h2i j
(6.4)
The momentum equation after accounting for AV becomes
d~vi dt =−
X
j mj
P
i
ρi2 + Pj
ρj2 + Πi j
∇iWi j (6.5)
and the corresponding energy equation becomes
deˆi dt =
X
j mj
Pi~vj ρi2
+ Pj~vi
ρj2 + Πi j
(vi+vj)
2
· ∇iWi j (6.6)
This combination conserves energy, linear and angular momentum.
This is the classic AV technique and is the standard in the code StarCrash
6.2
New form of AV technique
An alternate form of was proposed by (Monaghan, 1997) which uses solutions analogous
to Riemann solvers.The main idea is that any conserved scalar variable A satisfying
X
i mi
dAi
dt = 0 (6.7)
a dissipative term of the form
dA i dt diss = X j mj
αA,jvsig
~ρi j
(Ai−Aj)ˆei j· ∇iWi j (6.8)
needs to be added where αA,b determines the exact amount of dissipation and vsig is
the maximum signal velocity between the two particle a and b. With this form of AV
technique we get the momentum equation as
d~v
i dt diss= X j mj
αvsig(~vi −~vj) ˆei j
~ρi j
6.2. New form of AV technique 33
and the thermokinetic energy equations is
d~eˆ
i
dt
diss=
X
j mj
(e∗i −e∗j) ˆei j
~ρi j
· ∇iWi j. (6.10)
The energy along the line of sight between the two particles (Price, 2008)
e∗i =
1
2αvsig(~vi·eˆi j)
2+α
uvusigui (6.11)
has been used along with different signal velocities and dissipation parameters. For
non relativistic hydrodynamics, vsig which is the maximum signal velocity between two
particles is given by (Monaghan, 1997)
vsig= cs,i+cs,j−~vi j·eˆi j, (6.12)
where csk is the sound velocity of the particle k.
In the SPH code StarCrash, we have incorporated this form of AV scheme along with
the standard AV technique. The results and analysis of both the techniques is discussed
Chapter 7
Results and Analysis
7.1
Analysis
7.1.1
Shock tube without AV
In this section we will be showing the evolution of the shock tube problem without AV.
The initial conditions are ρL = 1,PL = 1,vL = 0.75, ρR = 0.125,PR = 0.0,vR = 0.0.. We
have used 1000 particles and density was calculated using summation. For this test we
used the fourth order Runge-Kutta integrator.
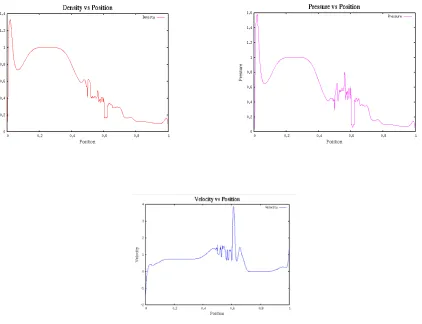
7.1.1.1 Entropy evolution technique without AV
The following figures show the evolution of the Shock tube problem (Chapter 5) using
the change in entropy (equation 2.23)
7.1. Analysis 35
Figure 7.1: Plots of density, velocity and pressure versus position for entropy evolution technique without AV at t=0.2
7.1.1.2 Energy evolution technique without AV
The following figures show the evolution of the Shock tube problem (Chapter 5) using
the change in energy (equation 2.22)
[image:44.612.100.522.348.672.2]36 Chapter 7. Results and Analysis
7.1.2
Shock tube with AV
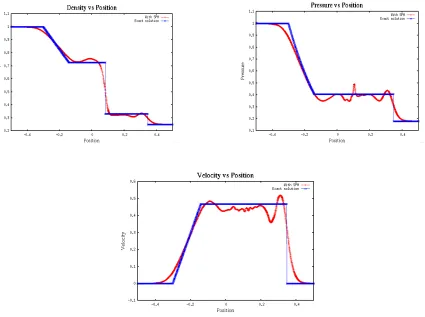
In this section we will be showing the evolution of the shock tube problem with AV.
The initial conditions are ρL = 1,PL = 1,vL = 0.0, ρR = 0.25,PR = 0.1795,vR = 0.0. (to
compare with the exact solution from section 5.4)
7.1.2.1 Entropy evolution technique with AV
The following figures show the evolution of the Shock tube problem (Chapter 5) using
[image:45.612.78.507.254.599.2]the change in entropy (equation 2.23) with AV
Figure 7.3: Plots of density, velocity and pressure versus position for entropy evolution technique with AV at t=0.18
7.1.2.2 Energy evolution technique with AV (Standard SPH method)
The following figures show the evolution of the Shock tube problem (Chapter 5) using
7.1. Analysis 37
Figure 7.4: Plots of density, velocity and pressure versus position for energy evolution technique with AV using standard SPH equations at t=0.18
7.1.2.3 Energy evolution technique with AV (2nd Method)
The following figures show the evolution of the Shock tube problem (Chapter 5) using
38 Chapter 7. Results and Analysis
Figure 7.5: Plots of density, velocity and pressure versus position for energy evolution technique with AV using SPH methods inspired from Riemann solvers at t=0.18
7.2
Results
7.2.1
Shock tube without AV
Figure 7.1 and 7.2 show us that, irrespective of the evolution technique used, we have
to use Artificial Viscosity when we are evolving the system. The oscillations seen in the
figures are due to the absence of AV.
7.2.2
Shock tube with AV
We have used entropy evolution technique in the figure 7.3 and standard SPH energy
evolution for figure 7.4. We got rid of most of the oscillations, However the second
energy evolution technique gives better results in terms of resembling the exact solutions
Chapter 8
Conclusions and Future Work
8.1
Conclusions
In this project we have done the following
• Studied the basic formulation of Smoothed Particle Hydrodynamics.
• Studied different integration techniques and used it in expanding the SPH code
StarCrash. From the analysis we can conclude that Leap Frog, RK2 and RK4
methods give substantially better conservation of energy in comparison to the Euler
Technique.
• Studied the Sod shock tube test and used it for studying the different methods
of evolving the SPH equations using artificial viscosity (AV). We were able to
numerically solve the shock tube test and produce results close to the analytical
solution by turning on AV.
• Studied different methods of evolving the shock tube using either change in entropy
or energy. In conclusion we can use either of the two methods for evolving a
non-relativistic system. We can either use the thermodynamical approach, if we want to
automatically satisfy the second law of thermodynamics or use the energy approach,
if we want to conserve the energy better. However, the results from both the energy
evolution techniques matched the exact solution much better than the results from
the entropy evolution technique.
• Studied two different time evolution techniques, which use the change in energy.
40 Chapter 8. Conclusions and Future Work
As one of the technique is similar to relativistic approach of SPH, we have built a
foundation for expanding the SPH code and using it to simulate relativistic systems.
8.2
Future Work
We have studied and used (in the code StarCrash) the energy evolution technique of
SPH which closely resembles the relativistic form of SPH proposed by (Rosswog, 2009).
For future work, we can add general relativistic SPH equations to the existing SPH code
StarCrash in which the space time metric can be considered un-perturbed by the self
gravity of the fluid. Relativistic SPH would be useful for studying of ejecta with rapidly
changing spatial geometries (for example tidal disruption of a star around a black hole)
and hydrodynamical systems with slowly varying gravitational fields, like post - merger
Bibliography
D. S. Balsara. von Neumann stability analysis of smooth particle hydrodynamics–
suggestions for optimal algorithms. Journal of Computational Physics, 121:357–372,
1995.
W. Benz, R. L. Bowers, A. G. W. Cameron, and W. H. . Press. Dynamic mass exchange
in doubly degenerate binaries. I - 0.9 and 1.2 solar mass stars. Astrophysical Journal,
348:647–667, jan 1990.
D. B. Bowen, M. Campanelli, J. H. Krolik, V. Mewes, and S. C. Noble. Relativistic
Dynamics and Mass Exchange in Binary Black Hole Mini-disks.Astrophysical Journal,
838:42, March 2017.
B.P. Abbott et al. Observation of gravitational waves from a binary black hole merger.
Phys. Rev. Lett., 116:061102, Feb 2016.
E.J. Caramana, M.J. Shashkov, and P.P. Whalen. Formulations of artificial viscosity for
multi-dimensional shock wave computations. Journal of Computational Physics.
J. A. Faber and F. A. Rasio. Post-Newtonian SPH calculations of binary neutron star
coalescence. III. Irrotational systems and gravitational wave spectra. Phys. Rev. D, 65
(8):084042, April 2002.
J. A. Faber, P. Grandcl´ement, and F. A. Rasio. Mergers of irrotational neutron star
binaries in conformally flat gravity. Physical Review D, 69(12), June 2004.
Joshua A. Faber and Frederic A. Rasio. Post-newtonian sph calculations of binary neutron
star coalescence: Method and first results. Physics. Review. D, 62:064012, Aug 2000.
42 BIBLIOGRAPHY
Joshua A. Faber, Frederic A. Rasio, and Justin B. Manor. Post-newtonian smoothed
particle hydrodynamics calculations of binary neutron star coalescence. ii. binary mass
ratio, equation of state, and spin dependence. Phys. Rev. D, 63:044012, Jan 2001.
R. A. Gingold and J. J. Monaghan. Smoothed particle hydrodynamics - Theory and
application to non-spherical stars. Monthly Notices of the Royal Astronomical Society,
181:375–389, November 1977.
L. Hernquist and N. Katz. TREESPH - A unification of SPH with the hierarchical tree
method. Astrophysical Journal, 70:419–446, June 1989.
Charles Hirsch, editor. Numerical Computation of Internal &Amp; External Flows:
Fun-damentals of Numerical Discretization. John Wiley & Sons, Inc., New York, NY, USA,
1988. ISBN 0-471-91762-1.
Randall J. LeVeque. Numerical methods for conservation laws (2. ed.). Lectures in
mathematics. Birkh¨auser, 1992. ISBN 978-3-7643-2723-1.
L. B. Lucy. A numerical approach to the testing of the fission hypothesis. Astronomical
Journal, 82:1013–1024, dec 1977.
J. J. Monaghan. On the problem of penetration in particle methods. Journal of
Compu-tational Physics, 82:1–15, May 1989.
J. J. Monaghan. Smoothed particle hydrodynamics. Annual reviews of Astronomy and
Astrophysics, 30:543–574, 1992.
J. J. Monaghan. SPH and Riemann Solvers. Journal of Computational Physics, 136:
298–307, September 1997.
M. Ponce. PhD thesis, Rochester Institute of technology. 2011.
D. J. Price. Modelling discontinuities and Kelvin Helmholtz instabilities in SPH. Journal
of Computational Physics, 227:10040–10057, December 2008.
BIBLIOGRAPHY 43
F. A. Rasio and S. L. Shapiro. Hydrodynamical evolution of coalescing binary neutron
stars. Astrophysical Journal, 401:226–245, December 1992.
F. A. Rasio and S. L. Shapiro. Hydrodynamics of binary coalescence. 1: Polytropes with
stiff equations of state. Astrophysical Journal, 432:242–261, September 1994.
F. A. Rasio and S. L. Shapiro. Hydrodynamics of binary coalescence. 2: Polytropes with
gamma = 5/3. Astrophysica, 438:887–903, January 1995.
S. Rosswog. Astrophysical smooth particle hydrodynamics. New Astronomy Reviews, 53:
78–104, April 2009.
S. Rosswog. SPH Methods in the Modelling of Compact Objects. Living Reviews in
Computational Astrophysics, 1:1, October 2015.
M. J. Valtonen, H. J. Lehto, and H. Pietil¨a. Probing the jet in the binary black hole
model of the quasar OJ287.Astronomy and Astrophysics, 342:L29–L31, February 1999.
J. Von Neumann and R. D. Richtmyer. A Method for the Numerical Calculation of