Contents lists available at ScienceDirect
Medical
Engineering
and
Physics
journal homepage: www.elsevier.com/locate/medengphy
Comparison
of
adaptive
neuro-fuzzy
inference
system
(ANFIS)
and
Gaussian
processes
for
machine
learning
(GPML)
algorithms
for
the
prediction
of
skin
temperature
in
lower
limb
prostheses
Neha Mathur
a,∗, Ivan Glesk
a, Arjan Buis
baDepartment of Electronic and Electrical Engineering, University of Strathclyde, 204 George Street, Glasgow G11XW, UK bDepartment Biomedical Engineering, University of Strathclyde, Glasgow G40NW, UK
a
r
t
i
c
l
e
i
n
f
o
Article history: Received2June2015 Revised21March2016 Accepted5July2016
Keywords: ANFIS Fuzzylogic
Gaussianprocessformachinelearning Lowerlimbprosthetics
Modeling Temperature
a
b
s
t
r
a
c
t
Monitoringoftheinterfacetemperatureatskinlevelinlower-limbprosthesisisnotoriouslycomplicated. Thisisduetotheflexiblenatureoftheinterfacelinersusedimpedingtherequiredconsistentpositioning ofthetemperaturesensorsduringdonninganddoffing.Predictingthein-socketresiduallimb tempera-ture bymonitoringthe temperaturebetweensocket and linerrather thanskinand linercould bean importantstepinalleviatingcomplaintsonincreasedtemperatureandperspirationinprostheticsockets. Inthiswork,weproposetoimplementanadaptiveneurofuzzyinferencestrategy(ANFIS)topredictthe in-socketresiduallimbtemperature.ANFIS belongstothefamilyoffusedneurofuzzysysteminwhich thefuzzysystemisincorporatedinaframeworkwhichisadaptiveinnature.Theproposed methodis comparedto ourearlier work usingGaussian processes formachine learning. By comparingthe pre-dictedandactualdata,resultsindicatethatboththemodelingtechniqueshavecomparableperformance metricsandcanbeefficientlyusedfornon-invasivetemperaturemonitoring.
© 2016TheAuthor(s).PublishedbyElsevierLtdonbehalfofIPEM. ThisisanopenaccessarticleundertheCCBYlicense.(http://creativecommons.org/licenses/by/4.0/)
1. Introduction
Manyamputeescomplainofincreasedtemperatureand perspi-rationwithintheirprostheticsocket[1,2].Themostaccurate tem-peraturereadingwouldbeobtainedbyplacingthesensordirectly incontactwiththeskin,however,thiswouldcreatepracticality is-sueswithprostheticuseinadomestic situationsuch as, protrud-ingleadwiring,consistentpositioningofsensorsandpossibleskin irritation anddiscomfort. Onthe other hand, embedding sensors andwiresintothehardprostheticsocketduringthe manufactur-ing process forprostheticsocketswould eliminateanyissues de-scribed earlier.Inaddition,therewouldbe nodamageto the de-viceduringthedonninganddoffinganditslongevitywouldnotbe marred.Wedescribetheroutewhereinthein-socketresiduallimb temperature can be accurately predicted by monitoring the tem-perature between theliner andthe socket usingartificial neuro-fuzzy inference system (ANFIS). The predictive modeling results are thencompared withGaussian processesformachine learning (GPML)previouslydevelopedbyPeeryetal.[3].
∗ Correspondingauthor.
E-mail address: [email protected](N.Mathur).
ANFIS are a class of adaptive networks that incorporate both neural networks and fuzzy logic principles. Neural networks are supervisedlearningalgorithmswhichutilizeahistoricaldatasetfor the prediction offuture values. In fuzzy logic, the control signal isgeneratedfromfiringthe rulebase.Thisrulebaseisdrawn on historicaldataandisrandominnature.Thisimpliesthatthe con-troller’soutputisalsorandomwhichmaypreventoptimalresults. The use of ANFIS can make the selection of the rule base more adaptive to the situation. In this technique, the rule base is se-lectedutilizingtheneuralnetworktechniquesviatheback propa-gationalgorithm.Toenhanceitsapplicabilityandperformance,the propertiesoffuzzylogic,i.e.approximatinganon-linearsystemby settingIF-THENrulesisinheritedinthismodelingtechnique.This integratedapproach,makesANFIStobeauniversalestimator[4].
Thegoalofthe Gaussianprocess techniqueontheother hand istoinferacontinuousfunctionf(x) fromatrainingsetof input-outputpairsinsupervisedlearningcontext.A,Gaussianprocessis acollectionofrandomvariables,anyfinitenumberofwhichhave joint Gaussian distributions [5]. The key assumption in Gaussian process modeling is that the data can be represented as a sam-ple froma multivariate Gaussian distribution. Therefore, it could betotallyspecifiedbythemeanandcovariancefunction.A Gaus-sianprocessmodelcanbethoughtofasapriorprobability distri-butionoverfunctionsinBayesianinference.Thisenablesdeducing
http://dx.doi.org/10.1016/j.medengphy.2016.07.003
thehyperparametersforthemodelwhicharean indicationofthe precisionandrelevanceoftheinputparametersforpredictingthe output.Thus,theaiminGaussianprocessmodelingistoselectthe modelparametersforwhichtheprobabilityofthetrainingdatais maximized[5].Inthis paper,we investigatetheuseof ANFISand Gaussianprocessalgorithmsinthecontextofpredictingthe resid-uallimbskintemperatureoftheamputee.
2. Method
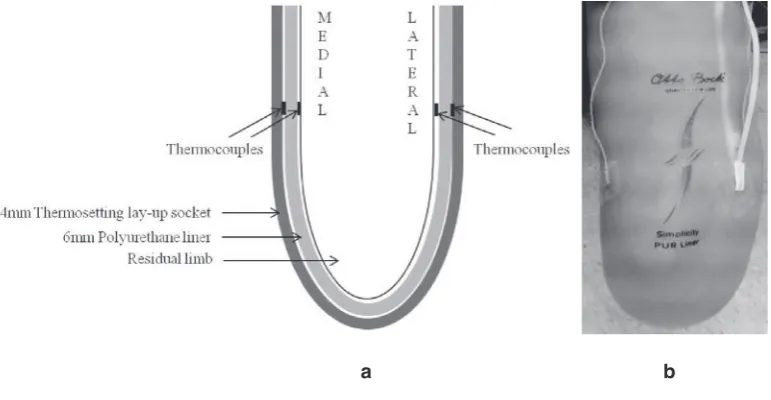
IthasbeenrecordedbyKluteetal.[6]thatenvironmental fac-tors like temperature, humidity, and also the activitylevel of an amputee affecttheir residual limb temperature. Also, itwas sug-gested by Klute et al. [7] that some prosthetic materials act as insulatorsasrestrict thetransfer ofheatandmaybethe causeof thermaldiscomfortintheresiduallimb.Thus,ifthethermal prop-ertiesoftheprostheticmaterialsareknownthentheresiduallimb temperaturecanbe predictedbymonitoring thetemperature be-tweenthelinerandthesocket.Inordertoinvestigatethe temper-atureprofilecorrelation of theresidual limband thesocket-liner interface,a68year-oldmaletransitibialtraumaticamputee weigh-ing70kg wasaskedto take partina laboratory test.The details ofinvestigation weresimilar toasdescribedbyMathur etal.[3]. In summary, the subject wore a 6mm Polyurethane liner (Otto-BockTechnogel)witha4mmthick socketmadeofthermosetting lay-upmaterialandwasdressedinshortsandt-shirtwithoutany extralayerofclothingontheprosthesis.According toKluteetal.
[7]thethermalconductivities ofmaterials used intheprosthesis oftheamputeesubjectwere– Polyurethaneliner0.19W/m°Kand Thermosettingsocketmaterial0.14W/m°K.
Tomonitorandrecord theresiduallimbandliner-socket tem-peratures, four K –type thermocouples via a data logger (type HH1384;Omega Engineering)were used.One thermocouple was tapedonthelateralsideofthelimbandtheotheronthemedial. Theremainingtwothermocoupleswere tapedonthe correspond-inglateralandmedialpositions onthe liner-socketinterface.The schematicandtheactual setup oftheprosthesis withthe sensor placement are indicated in Fig. 1. Data fromthese four thermo-coupleswasrecordedatasamplingrateof0.5Hzatadefined am-bienttemperature(dataset A). Thiswasrepeatedagain aftertwo months to confirm the influence of ambient temperatureon the
Table1
Experimentalprotocolfortheamputeetestsubject.
Activity Time(min)
Resting/sitting 10
Walkingonthetreadmillatself-selected speedof0.62m/s
10
Finalrest 15
residual limb skin temperature(dataset B). Detailsof the 35min experimentalprotocolareasindicatedinTable1.
Thetemperatureprofilesofthelinerandtheresiduallimbskin wererecordedinaclimatecontrolledchamberwithzerowind ve-locityand40% humiditylevelsforambienttemperaturesof10°C, and then the same protocol was repeated for 15°C, 20°C, and 25°C. The results indicated that for any given ambient temper-ature, the liner temperature profile follows that of the in-socket residuallimbtemperature.Thissuggestedapossibilitytoapply su-pervised machine learningalgorithms tomodel theresidual limb temperature of the amputee as a function of liner temperature. Timeaveragingof5sisdoneontherecordeddatatohelpin iden-tifyingthetrendbetterandsmoothout thefluctuations. Different modeling techniques for machine learning were utilized and the results from the Gaussian processes model and ANFIS technique arecompared inthisstudy.Since, thetemperatureprofilesofthe residuallimbarealmostsimilarfortheambienttemperaturepairs of 10°C, 15°C and 20°C, 25°C, the predictive model atambient temperaturesof10°Cand25°Careonlydiscussedinthisstudy.
3. Adaptiveneurofuzzyinferencestrategy
ANFISbelongstoa familyofhybridsystem,calledastheterm ‘neurofuzzynetworks’[8]inheritingthepropertiesofbothneural networksand fuzzylogic. Neural networkscan easily learn from the data. However, it is difficult to interpret the knowledge ac-quired by it, as meaning associated with each neuron and each weightitquitecomplextocomprehend.Incontrast,fuzzylogic it-self cannot learnfrom thedata.But fuzzy-based modelsare eas-ilyunderstood as it utilizes linguisticterms rather than numeric and the structure of IF-THEN rules. Linguistic variables are de-finedasvariableswhosevaluesarewordsorsentencesinanatural
a
b
[image:2.595.335.521.76.133.2] [image:2.595.103.489.514.714.2]Fig.2. Blockdiagramofaneuro-fuzzy(ANFIS)controller.
languagewithassociateddegreesofmembership.Thefuzzysetin which linguistic variables belongs isan extension of a ‘crisp’ set where an element could have full or no membership. However, fuzzy sets allow partial membership as well, which implies that anelementmaypartiallybelongtomorethanoneset[9].Inother words,foracrispset,themembershiplevelofanelementxinset
Acanbeexpressedbyacharacteristicfunction
μ
A(
x)
,suchthatifμ
A(
x)
=1 if x
A implyingfullmembership
0 if x ∈/A implyingnon-membership (1)
But fora fuzzysetA the membershipfunction
μ
A(
x)
can takevalues in the interval [0, 1].The basic structure ofthe developed ANFIScontrollerforthepredictionofresiduallimbskin tempera-tureconsistsoffourparts,whichare,fuzzification,rulebase, infer-enceengineandthede-fuzzificationblocksasseeninFig.2.
IntheANFIScontroller,thecrispinputsignal(linertemperature inourcase)isconvertedtofuzzyinputsbythemembership func-tion. The membership function patternused inour ANFISmodel isGaussian.ThefuzzyinputsalongwiththeGaussianmembership function are then fed into the neural network block. The neural networkblockconsistsofarulebasewhichisconnectedtothe in-ferenceengine.Backpropagationalgorithmisusedtotrainthe in-ference enginefortheproperselectionofrulebase.Oncetrained, proper rulescan begeneratedandfiredfromthe neuralnetwork blocktoyieldoptimaloutput.Thelinguisticoutputfromtheneural network block isthen converted into crisp output (residual limb skin temperature) by the defuzzifier unit [10]. The structure of the neuro-fuzzy model consistsof differentadaptive layers. Each of theselayers hasnodes withan associated network oftransfer functions,throughwhichthefuzzyinputsareprocessed.The out-put from these nodes are then combined to yield a single crisp output astheconfigurationoftheANFISpermitsonlyoneoutput of themodel. Thiscrispoutput is fedbackasinput to themodel andcomparedwiththesetvalue.Ifthereisanydeviation,the er-rorsignal sogeneratedbecomestheinputtotheANFIScontroller, therebymaintainingstabilityinthesystem[11].
ANFIS, supports the Takagi–Sugeno based systems [12]. The structureoftheadaptivenetworkiscomposedoffivenetwork lay-ersi.e.layer1tolayer5(withnodesandconnections)asshownin
Fig.3.Assumingthatthesystemisdefinedtohavetwoinputsx1
andx2,one outputz andfuzzysetA1,A2, B1,B2;then fora first
orderTakagi–Sugenofuzzymodel,havingtwoIF-THENrulesinthe commonruleset,canbe writtenusingthefollowingEqs.(2)and (3)[13].
Rule1:If x 1 is A 1and x 2 is B 1 then f 1= p 1x 1+q 1x 2+r 1 (2)
Rule2:If x 1 is A 2and x 2 is B 2 then f 2= p 2x 1+q 2x 2+r 2 (3)
Layer 1: This layer is called as the fuzzification layer. Here the crisp input signal is fed to the node i which is associated witha linguistic labelAi or Bi−2. Thus, themembership function
O1,i
(
X)
determines the membership level (full, none or partial)of the given input. The output of each node is calculated using
Eqs.(4)and(5).O1,i
(
X)
isthegeneralizedGaussian shapedmem-Fig.3. ArchitectureofafirstordertworuleTakagi–SugenotypeANFIS.
bershipfunctionusedinourmodeldevelopment.
O 1,i=
μ
Ai(
x 1)
for i =1,2 (4)O 1,i=
μ
Bi−2(
x 2)
for i =3,4 (5)Layer 2: Thenodes inthis layerare fixed andlabeled asO2,i.
Theoutputofeachnodeistheproductofalltheincomingsignals asintheEq.(6).
O 2,i=w i=
μ
Ai(
x 1)
μ
Bi(
x 2)
for i =1,2 (6)Theoutputofeachnoderepresentsthefiringstrengthofarule. Also,knownasthemembershiplayer,itactsontheinputvariables fromlayer1asmembershipfunctionsto representthemintheir fuzzysets.
Layer3:Eachnodeinthislayercalculatestheratioofthe indi-vidualrule’sfiringstrengthtothesumofallrulesfiringstrengths as in the Eq. (7). wi represents the normalized firing strength.
Hence,thislayerisalsoknownastherulelayer.
O 3,i=w i=
w i
w 1+w 2
for i =1,2 (7)
Since,eachnodeinthislayercalculatesthenormalizedweights, the output signal can be thought of as the normalized firing strengthofagivenrule.
Layer 4: This layer known as the defuzzification layer. It cal-culatestheindividual outputvalues y fromtheinferring ofrules fromtherulebase.Individualnodesofthislayerareconnectedto therespectivenormalizationnode inlayer 3andalsoreceive the inputsignal.Eachnodeofthislayerisadaptiveinnaturewiththe nodefunctiongivenby theEq.(8)wherepi,qi,riisaset of
con-sequentparametersofrulei.
O 4,i=w if i=w i
(
p ix 1+q ix 2+r i)
(8) [image:3.595.329.547.54.356.2] [image:3.595.48.293.55.142.2]Fig.4. EpochsandtrainingerrorinANFISforambienttemperatureof10°Cat lat-eralside.
thenodesofthedefuzzificationlayertoproducetheoverallANFIS outputasinEq.(9).
overalloutput=O 5,i=
i
w if i=
iw if i
iw i
(9)
Thisarchitectureoftheadaptivenetworkisusedtodevelopthe ANFISmodelforthepredictionofin-socketresiduallimb temper-atureandisdiscussedinthenextsection.
4. Modelgenerationandprediction
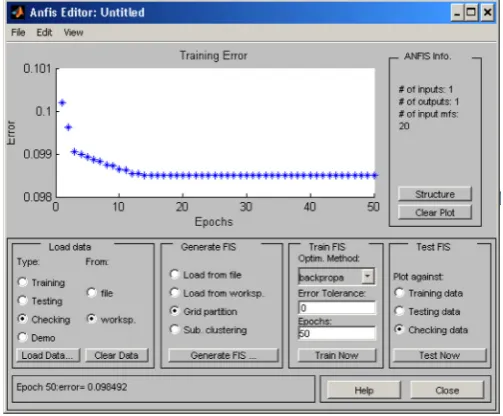
TheANFISmodelisdesignedusingMATLAB’sFuzzyLogic Tool-box and the GUI editor which was used for analyzing its per-formance [14]. The optimized sets of rules were generated using the grid partition method. The architecture of the realized AN-FISmodelhadthefollowing specifications;numberofnodes: 84, numberoflinearparameters:20,numberofnonlinearparameters:
[image:4.595.301.553.58.266.2] [image:4.595.40.279.59.254.2]Fig.5. Illustrationofpredictionwith ANFISforambienttemperatureof10°Cat lateralside.ThepredictedFISoutputisindicatedbyredandthetestdatais rep-resentedbythebluecrosses.(Forinterpretationofthereferencestocolorinthis figurelegend,thereaderisreferredtothewebversionofthisarticle.)
Fig.6. EpochsandtrainingerrorinANFISforambienttemperatureof10°Cat me-dialside.
40,numberoftrainingdatapairs: 210,numberoftest datapairs: 99 andnumberof fuzzyrules: 20. The adaptivenetwork utilizes thehybridmethodtooptimizethemembershipfunctionsandthe parameters so that the prediction error is minimized. Dataset A is used to train the model andthe predictive ability ofANFIS is testedondatasetB.Duringthetrainingprocessofthemodel,the input dataismappedanumberoftimesto minimizethe predic-tionerror.Thenumberofiterationsrequiredformappingisknown as epochs. It is observed from Fig. 3 that 50 iterations (epochs) arerequiredtotrainthemodelondatasetAwithaminimalerror of0.15341.It canbe observedfromFig. 4that thetrainedmodel is then tested on 100 data points from dataset B to validate it.
Figs.4–7illustratethepredictiveabilityofANFISforambient tem-peratureof10°C atlateralandmedialsideofresiduallimb.They aregeneratedinthesimilarwayforlateralandmedialsideofthe residuallimbat25°C.
[image:4.595.301.554.495.703.2] [image:4.595.40.282.503.703.2]a
b
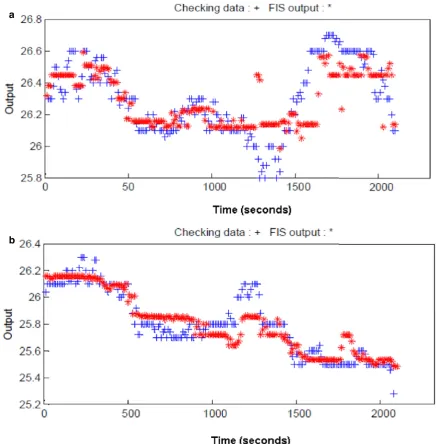
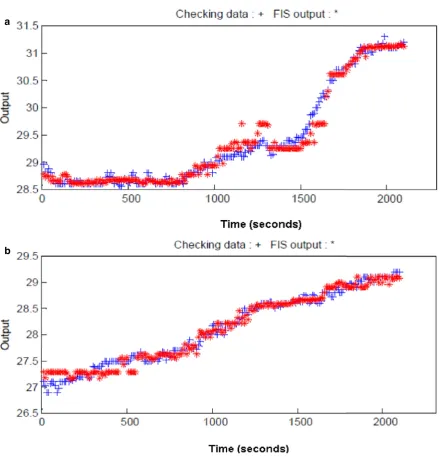
Fig.8. PredictedresiduallimbskintemperaturefromANFISmodelisshownalongwiththeactualskintemperatureatlateralandmedialsidesin(a)and(b),respectively, atambienttemperatureof10°C.Theactualmeasuredresiduallimbtemperatureisindicatedasthecheckingdatawhereasthepredictedresiduallimbtemperatureisthe FISoutput.Theaxislabelsimply:indexisthetimeinsecondsandtheoutputisthetemperatureinCelsius.
5. Obtainedresults
Ouraimwastousethemodeltopredicttheresiduallimbskin temperature fromthe linertemperature andcompare theresults with direct skin temperaturemeasurements. Hence, the input to themodelisthelinertemperatureobtainedfromrunningthe ex-periment in the climate chamber and the output of the model wouldbethepredictedresiduallimbskintemperature.Totestthe predictive capability ofa modelwe developed, themodel isfirst ‘trained’ ononeset ofdata andthen is‘tested’onpreviously un-seendatawecollectedindependently.Finally,theresultsare com-paredforitsaccuracy.
It isseenfromthat theskintemperatureisdependent onthe ambient temperature. Hence, individual Gaussian process models andANFIS modelsfor thelateral andmedialside of theresidual limbweredesigned, usingtheprincipleasdescribedinthe previ-oussectionforambienttemperaturesof10°Cand25°C.
The actual skin temperature obtained by the ANFIS model is shown in Figs. 8 and 9 for two very different ambient tem-peratures of 10°C and 25°C, respectively. For both these exper-iments, done at different ambient temperatures, our predictive modelusing ANFISprovides a simple,effective,andpractical ap-proach to determine the unknown skin temperature of the sub-ject within the prosthetic device from the actual liner measure-ments.Boththedevelopedpredictivemodelsleadtoresultswhich have an accuracy of ±0.5°C. However, this study needs to be extended on a greater population in order to define a generic behavior.
6. Discussionandtestresults
[image:5.595.82.519.56.501.2]a
b
Fig.9. PredictedresiduallimbskintemperaturefromANFISmodelisshownalongwiththeactualskintemperatureatlateralandmedialsidesin(a)and(b),respectively, atambienttemperatureof25°C.Theactualmeasuredresiduallimbtemperatureisindicatedasthecheckingdatawhereasthepredictedresiduallimbtemperatureisthe FISoutput.TheoutputlabelimpliestemperatureinCelsius.
Table2
PerformancecomparisonofANFISandGPMLmodels.
MAE RMSE
ANFIS GPML ANFIS GPML
Trainingdata 0.1427 0.0879 0.1534 0.0910
Testdata 0.07412 0.0946 0.07583 0.102
temperaturefrom the linertemperature values ofdataset B. The performanceofboththemodelswascomparedbythemean abso-luteerror(MAE), rootmeansquarederror(RMSE), andR2 criteria
areshowninTables2and3.
The MAEindicates how closethepredictions are tothe even-tualoutcomeswhichisgivenby
MAE= 1
n
n
i=1
|
f i−y i|
=1 n
n
i=1
|
e i|
(10)Table3
R 2criteriacomparisonofANFISandGPML
models.
Modellingtechnique R 2
ANFIS 0.9802
GPML 0.97
As seen in Eq. (10), the mean absolute error can be defined as the average of absolute errors; the absolute error given by
[image:6.595.71.517.60.518.2] [image:6.595.65.251.585.639.2] [image:6.595.363.493.595.632.2]involvessquaringthedifference betweenthepredictedand corre-sponding observedvalues,averaging it overthe sampleandthen finallytakingitsaverage.Thiscanbewrittenas
RMSE=
1 n ni=1
e i2 (11)
RMSEhasaquadraticerrorrule,wheretheerrorsaresquared beforebeingaveraged.Asaresult,arelativelyhighweightisgiven tolargeerrors[15].Thiscouldbeusefulwhenlargeerrorsare un-desirable in a statistical model.From Table 2 it can be deduced thatfortheGaussianmodeltheMAEandRMSEisslightlyloweras comparedtoANFIS.Butinordertodiscriminatebetweenthe mod-els for their predictive performance, the errormetrics should be capabletodifferentiateamongstthemodelresults.Inthiscontext, theMAEmightbeaffectedbylargeaverageerrorvaluesby ignor-ing some large errors. The RMSE isgenerally better in reflecting the modelperformance differences[16] asitgives higherweight totheunfavorableconditions.ThedifferencebetweentheRMSEof theGaussianmodelandANFISisnotimmenseandhenceboththe modelshavecomparableperformancemetrics.
Anothermeasureofgoodness-of-fitofthemodelistheR2
cri-teria.Highervaluesareindicativethatthepredictivemodelfitsthe datainabetterway.Bydefinition,R2istheproportionalmeasure
of variance of one variable that can is predicted from the other variable. Thus ideallythevaluesofR2 toapproach oneis always
desirable. However, a highR2tellsyou that the curve came very
close to thepoints butin reality it doesnot always indicate the modelquality[17].FromTable3,bothGaussianandANFISmodels havesimilarR2 valueswhichareindicatorsthatinboth the
mod-eling techniques,the predictioncapabilityissimilar. UsingtheR2
criteriainconjunctionwiththeMAEandRMSE,itcanbefairly de-ducedthattheGaussianandANFISmodelscanbeaccuratelyused forthepredictionofresiduallimbtemperature.
7. Conclusion
This studyaddressesthe challengesof non-invasively measur-ingthein-socketresiduallimbtemperaturebycomparingtwo dif-ferentmodelingtechniques,namelyANFISandGaussianprocesses. The temperature profile of the residual limb skin is dependent on the ambient temperature and the activity level of the sub-ject.Thedataobtainedatambienttemperaturesof10°Cand25°C were used to develop an ANFISmodel.The results fromthe AN-FISmodelwereencouraging.Thesewerecomparedwiththe previ-ouslydevelopedGaussianmodel.Theperformancemetricsofboth the models indicatethat they are very similar intheir predictive abilitywithanaccuracyof±0.5°C.Howeverthisapproachhas cer-tainlimitationsaswell.Theresiduallimbtemperatureprofilewill differforeveryamputeeastherearevariationsinphysiological re-sponses (suchasdifferencesincapillarydilatation)andvariations inpropertiesoftheskinparameters(suchasthickens/composition oftheskinlayers).Becauseofthevarying residuallimb tempera-tureprofileinindividuals,thesemachinelearningalgorithmshave to be personalizedby trainingthem with individual datasets for eachoftheamputeesubjects.Thisstudywhichwasconductedon one amputee subjecta number of times, verified the success of
proposed approach withan accuracy of ±0.5°C. Thus, thiswork will be used to figure out the envelopein estimating the statis-ticalpoweri.e.howmanypeople are neededtomake themodel clinicallysignificantandwillbeusefulinextendingitonagreater populationinordertodefineagenericbehavior.Alsothe tempera-tureprofileoftheresiduallimbisdependentontheambient tem-perature;it putsa constraintondrawing upa generalizedmodel forallambienttemperatures.Thiscouldpotentiallyberesolvedby usinginterpolation orextrapolationtechniquesin themodelata giventemperaturetopredicttheresiduallimbtemperatureprofile atanotherambienttemperatureprovidedthattheactivitystateof thesubjectisknown.
Conflictofinterest
None.
Acknowledgments
This work was supported by the Engineering and Physical Sciences Research Council under the Doctoral Training Grant EP/K503174/1 andthe Centre for Excellencein Rehabilitation Re-search(CERR). Thisinvestigationwasimplemented following eth-icalapprovalgranted bytheUniversityofStrathclydeEthics Com-mittee(RefUEC13/04).Also, supportfortheclimatechamberwas givenbyUniversityofGlasgow.
References
[1]Huff EA,Ledoux WR,Berge JS,KluteJK. Measuring residual limb skin temper-aturesattheskin-prosthesisinterface.JProsthetOrthot2008;20(4):170–3.
[2]PeeryJT,LedouxWR,KluteGK.Residual-limbskintemperatureintranstibial sockets.JRehabilResDev2005;42(2):147–54.
[3]MathurN,GleskI,BuisA.Skintemperaturepredictioninlowerlimb prosthe-ses.IEEEJBiomedHealthInform2016;20(1):158–65.
[4]KusagurA,KokadSF,RamBVS.Modeling,design& simulationof anadaptive neurofuzzyinferencesystem(ANFIS)forspeedcontrolofinductionmotor.Int JComputAppl2010;6(10):29–44.
[5]WilliamsCKI,RasmussenCE.Gaussianprocessesforregression.Neural infor-mationprocessingsystems,8.Cambridge,MA:MITPress;1996.p.514–20.
[6]KluteG,Huff E,LedouxW.In-socketskintemperatureandperceptionof com-fortover awhole day.In:AmericanAcademy ofOrthotistsandProsthetists annualmeetingandscientificsymposium,Seattle,Washington;2007.
[7]KluteGK,RoweGI,MamishevandAV,LedouxWR.Thethermalconductivity ofprostheticsocketsandliners.ProsthetOrthotInt2007;31(3):292–9.
[8]Jang JSR. ANFIS:adaptive-network-basedfuzzyinferencesystem.IEEE Trans SystManCybern1993;23(3):665–85.
[9]NedijahN,deL,MourelleM.Fuzzysystemsengineering:theoryandpractice. Germany:Springer;2005.
[10]SugenoM,KangGT.Structureidentificationoffuzzymodel.ProcIEEETrans SystManCybern1988;28:15–33.
[11]SugenoM,TanakaK.Successiveidentificationofafuzzymodelandits applica-tionstopredictionofacomplexsystem.ProcFuzzySetsSyst1992;42:315–34.
[12]Takagi T, SugenoM.Fuzzy identificationofsystems anditsapplicationsto modelingandcontrol.IEEETransSystManCybern1985;SMC-15(1):116–32.
[13]CelikyilmazA,TürksenIB.Modellinguncertainitywithfuzzylogic:withrecent theoryandapplications.Germany:Springer;2009.
[14][Online]. Available at Mathworks. Neuro-adaptive learning and ANFIS
MATHWORKS.COM.
[15]Chai T,DraxlerRR.Rootmeansquareerror(RMSE) ormeanabsoluteerror (MAE)?– Argumentsagainst avoidingRMSE inthe literature.GeosciModel Dev2014;7(3):1247–50.
[16]Armstrong JS, Collopy F. Error measures for generalizing about forecasting methods:empiricalcomparisons.IntJForecast2002;8(1):69–80.