Design And Development Of Small Size Animatronics Robot Mechanical Construction
Full text
Figure
Related documents
The main aim of this project is to design an autonomous line tracking robot with the ability to avoid obstacle.. This aim is achieved through
In this project, the main objective are to design the rotation jig for a robot welding and simulate the robot welding and rotation jig using a Workspace programming.. The other
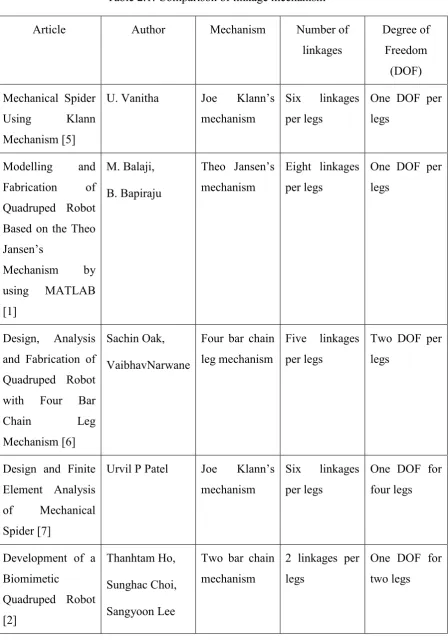
The work in this paper mainly focuses on mechanical design, trot and pace gait locomotion analysis, fabrication and experimentation of quadruped robot.. Conclusions derived
Whereas, the presented robot in this paper has been designed using a proper legged mechanism, which can support swimming and suitable walking phenomena.. The initial design
In this Project, we have described overall design for a video streaming wheel robot which is controlled using Beagle Bone Black and a webpage created using HTML and
This paper presents a new multi-function finger rehabilitation robot with a simple mechanical structure, which could help fingers and thumb realize bending/extending
Then, the suitable of the microcontroller and the sensor of the robot is chosen to achieve the main objectives to be able the robot to carry the load on the stair.. This
DRAWING OF DESIGN DEVELOPMENT FABRICATION AND TESTING OF SMALL VERTICAL AXIS WIND TURBINE.. Fig 1 Drawing of Design Development Fabrication and Testing of Small Vertical Axis
