University of Southern Queensland
Faculty of Health, Engineering and Sciences
Measuring Strain Using Microwave Energy
A thesis submitted by
M. Trethewey
in fulfilment of the requirements of
Master of Engineering Research
Abstract
The measurement of force (or weight) is required in a great diversity of industries
and applications. The wide range of force levels, force characteristics and required
data has driven the development of many different technologies to meet these needs.
Most of these technologies depend on the force (or weight) deforming an elastic load
bearing member, with some form of transducer to convert the strain in the member
to an electrical quantity. The selection of this transducer will depend heavily on the
particular application. The range of major technologies are briefly reviewed and their
limitations noted.
The research set out in this dissertation investigated an original transducer system that
uses microwave energy to measure the strain in a loaded member, with the member
forming an integral part of the transducer. The basic design principle involves a pair
of cavities in the elastic member, one only which is subject to deformation under load,
while both cavities share a common temperature profile. The cavities are caused to
resonate by a microwave feedback exciter, and the difference frequency between the
cavities is extracted. This difference frequency will carry information related to the
strain in the loaded cavity, whilst discriminating the common mode dimensional changes
due to expansion and contraction with temperature change.
The design of a prototype transducer system focused on three areas:
The mechanical design of a transducer which produced strain in the loaded cavity in one
co-ordinate direction only, so as not to produce complex deformation of the cavity. In
principle this would ensure good linearity between the applied load and the microwave
ii
experience no strain when the first cavity was loaded, but both cavities were adjacent
in a single block of metal to ensure a common temperature profile. This member
was designed to meet all the normal requirements, specifically low creep, high fatigue
life and good stress-strain linearity within Hooke‘s law, but also had to be suitable for
manufacture in a material having low resistivity to maintain high Q values in the cavity
resonators. The readily available Alloy-380 brass was chosen.
Electromagnetic analysis was undertaken for both shallow cylinder and shallow square
box cavities, and the methods of electrically coupling into each. The resonant frequency
sensitivity to cavity deformation in different co-ordinate directions and modes of
reso-nance was also analysed. The advantages and disadvantages of each, and the choice of
a suitable cavity resonant frequency is discussed.
Microwave system design comprised a loop feedback type microwave oscillator using
MMIC (monolithic microwave integrated circuit) devices as the active components.
The phase and magnitude data for coupling between the cavity probes is detailed,
and an analysis of the design procedure for the printed circuit board microstrip layout
is described. The difference frequency between the two cavities was extracted using
a microwave mixer, and its design is detailed including the local oscillator and the
intermediate frequency amplifier.
Two aspects of performance verification of the design were undertaken. Firstly,
res-onator performance measurements were undertaken and analysed with respect to the
performance of the microwave equipment available. Measurements revealed the
charac-teristics of the coupling probes in the cavity, the performance of signal output coupling
alternatives between the cavity and the effects of circuit shielding. The principal results
were:
• Phase noise = -50 dBc/Hz (relative to carrier) at 1 kHz offset from carrier
• 3 dB bandwidth = 2 kHz
• Drift = -0.0055% of carrier / 5 minutes
iii
Secondly, the performance of the complete prototype transducer was measured.
Appa-ratus to load the transducer was designed and constructed, and the output difference
frequency between the two cavities monitored during progressive loading and
unload-ing, and independent repetitions provided an assessment of repeatability. The results
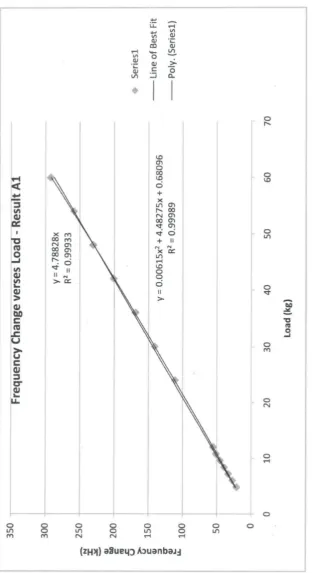
yielded a sensitivity of 4.84± 0.05 and 4.79±0.05 kHz/kg wt (respectively), at least 99.9% linearity, and nil detectable hysteresis (i.e. less than the limits imposed by the
measuring equipment).
It is concluded that the technique is feasible and proof-of-concept has been achieved,
but there remain significant challenges before the technique would be commercially
Certification of Dissertation
I certify that the ideas, designs and experimental work, results, analyses and conclusions
set out in this dissertation are entirely my own effort, except where otherwise indicated
and acknowledged.
I further certify that the work is original and has not been previously submitted for
assessment in any other course or institution, except where specifically stated.
M. Trethewey
Q9521089
Signature of Candidate
Date
ENDORSEMENT
Signature of Supervisor/s
Acknowledgments
I wish to thank my three supervisors Assoc. Prof. Nigel Hancock, Dr. Andrew Maxwell
and Assoc. Prof. Jim Ball for their untiring support and responses to my questions.
Without their input this project would not have been possible. I would also like to
make particular mention of Assoc. Prof. Jim Balls’ knowledge of microwaves and his
willingness to participate in this project in his retirement.
Thanks to Prof. John Leis who provided a great deal of encouragement for me to
commence this project and help in organising the initial meetings with academic staff
and help with the research training training scheme scholarship.
I would also like to thank my beautiful wife Deanne for her support and understanding
throughout this project.
M. Trethewey
University of Southern Queensland
Contents
Abstract i
Acknowledgments v
List of Figures xii
List of Tables xx
Chapter 1 Introduction 1
1.1 Background . . . 1
1.2 Hypothesis . . . 1
1.3 Research Aims and Objectives . . . 2
1.3.1 Mechanical Member . . . 2
1.3.2 Cavity Exciter Circuit . . . 3
1.3.3 Performance of Cavity Resonator . . . 3
1.3.4 Construction of Complete Transducer . . . 4
CONTENTS vii
1.4 Structure of the Dissertation . . . 5
Chapter 2 Literature Review 6 2.1 Introduction . . . 6
2.2 Measuring Mechanical Strain using a Cavity Resonator . . . 7
2.3 Force Measurement and Transduction Options . . . 10
2.3.1 Strain Gauges . . . 10
2.3.2 Mechanical Resonant Systems . . . 12
2.3.3 Hydraulic Systems . . . 14
2.3.4 Fibre Optic Systems . . . 14
2.4 MMIC based Oscillators . . . 15
2.5 Prior Methods of Realising a Cavity Oscillator . . . 18
2.5.1 Oscillator Theory . . . 18
2.5.2 Impedance Transformers . . . 20
2.5.3 Criteria for Cavity Oscillation . . . 23
Chapter 3 Initial Design Concepts and Microwave Cavity Measure-ments 27 3.1 Introduction . . . 27
3.2 Mechanical Designs . . . 27
3.3 Investigation of Cavity Coupled Microwave Oscillators . . . 32
CONTENTS viii
Chapter 4 Mechanical Design of Transducer 41
4.1 Introduction . . . 41
4.2 Cavity Geometry . . . 41
4.2.1 Cylindrical Cavities . . . 42
4.2.2 Square Cavities . . . 43
4.3 Choice of Materials for the Mechanical Element . . . 45
4.3.1 Change of Young’s Modulus with Temperature . . . 49
4.3.2 Stress Concentration, Fatigue and Creep . . . 50
4.3.3 Corrosion . . . 52
4.3.4 Electrical Resistance . . . 53
4.3.5 Selection of a Material . . . 54
4.4 Transducer Mechanical Design and Analysis . . . 55
4.5 Change in Mechanical Properties due to Modified Cover Plates . . . 58
Chapter 5 Microwave Resonator Theory 59 5.1 Introduction . . . 59
5.2 Cavity Shape . . . 59
5.3 Choice of Resonator Frequency . . . 60
5.4 Resonator Coupling . . . 61
5.5 Resonator Modes and Sensitivity to Cavity Mechanical Deformation . . 65
CONTENTS ix
Chapter 6 Microwave System Design 69
6.1 Introduction . . . 69
6.2 Local Oscillator and R.F. Oscillator . . . 69
6.3 Local Oscillator Amplifier . . . 81
6.4 Microwave Mixer . . . 82
6.5 Intermediate Frequency Amplifier . . . 83
Chapter 7 Resonator Performance 86 7.1 Introduction . . . 86
7.2 Microwave Test Equipment . . . 86
7.2.1 Suitability of Equipment . . . 87
7.2.2 Borrowed Equipment . . . 89
7.3 S-parameter Measurements of the Cavity and Coupling Probes . . . 89
7.4 S-Parameter Measurements of Test Probes and Cavity . . . 90
7.5 Cavity Resonator Coupling . . . 97
7.6 Cavity Resonator Output Signal Characteristics . . . 99
7.6.1 Phase Noise . . . 99
7.6.2 3dB Bandwidth . . . 101
7.6.3 Drift . . . 102
7.6.4 Circuit Shielding . . . 103
CONTENTS x
Chapter 8 Prototype Transducer Performance Testing 117
8.1 Introduction . . . 117
8.2 Output Frequency Change verses Applied Load . . . 117
8.2.1 Objective . . . 117
8.2.2 Apparatus . . . 117
8.2.3 Method . . . 120
8.2.4 Results . . . 120
8.2.5 Repeatability Analysis 1 - Sensitivity . . . 124
8.2.6 Repeatability Analysis 2 - No-load Frequency . . . 127
8.2.7 Non-linearity Analysis . . . 127
8.2.8 Hysteresis . . . 128
8.2.9 Thermal Stability . . . 130
8.3 Conclusions . . . 130
Chapter 9 Conclusions and Further Work 132 9.1 Conclusions . . . 132
9.2 Further Work . . . 133
9.2.1 Active Current Sources for MMIC Amplifiers . . . 134
9.2.2 Attachment of Cavity Cover Plates . . . 134
9.2.3 Cavity Cover Plate Deflection . . . 134
CONTENTS xi
9.2.5 Response Time . . . 136
References 137 Appendix A Data Sheets 140 A.1 MMIC Amplifier Data Sheet . . . 141
A.2 Frequency Mixer Data Sheet . . . 146
A.3 Inductor Data Sheet . . . 149
A.4 380 Brass Data Sheet . . . 152
Appendix B Pictures,Calibration Sheets and DataBook Extracts for Mi-crowave Equipment 154 Appendix C Results from Applying Load to the Transducer 162 C.1 Introduction to this Appendix . . . 163
C.2 Group A Test Results . . . 164
C.3 Group B Test Results . . . 184
List of Figures
2.1 Conceptual layout of cavity with two orthogonal resonators - reproduced
from Fig 8.Farley et al. (1991) . . . 8
2.2 View of the Farley et al. (1991) cavity cross section under load - repro-duced from Fig 5. . . 9
2.3 Setup of the Barth (2000) feedback oscillator clearly showing the two coupling ports into the cavity - reproduced from Fig 1(a). . . 16
2.4 Oscillator Equivalent Circuit : partly reproduced from Materka & Mizushina (1982) . . . 19
2.5 Tapered Stripline Transformers reproduced from Womack (1962) . . . . 21
2.6 Variation of F(ω) with frequency for various values of the ratio βδ o re-produced from Womack (1962) . . . 22
2.7 Two-port transistor oscillator circuit - reproduced from Kai Chang & Nair (2000) . . . 23
3.1 Simple Cantilever Beam . . . 28
3.2 Simple Beam with Two Cavities . . . 29
LIST OF FIGURES xiii
3.4 Displacement of Beam with Strain Control Holes. The colour bar shows
displacement in meters. . . 31
3.5 Displacement of Bending Type Beam under load . . . 33
3.6 Compression Block Design Drawings . . . 34
3.7 Compression Block Simulation Results . . . 35
3.8 Picture of Cavities . . . 37
3.9 Picture of the Cavity Probe and SMA Connector . . . 37
3.10 Picture of the Probe and Cavity Cover Plate Assembly . . . 38
3.11 Picture of the Complete Cavity Assembly . . . 38
3.12 Comparison between Impedance Phase and Magnitude for 40 mm Cavity with 3 mm Probe . . . 39
3.13 Comparison between Impedance Phase and Magnitude for 40 mm Cavity with 5 mm Probe . . . 40
4.1 Drawing of Dual Cavity Mechanical Block . . . 46
4.2 Constraints Applied to Dual Cavity Mechanical Block for Finite Element Analysis . . . 47
4.3 Strain Induced in Dual Cavity Mechanical Block due to Applied Loads . 48 4.4 S-N Diagrams reproduced from Oberg, Jones & Horton (1987). Diagram 1 shows the behavior of a material for which there is an endurance limit Sen. Diagram 2 shows the behavior of a material for which there is no endurance limit . . . 50
LIST OF FIGURES xiv
4.6 Stress-concentration factor, Kt, for a shaft, with a transverse hole, in
torsion - reproduced from Oberg et al. (1987) . . . 52
4.7 Modulus of Elasticity verses Temperature for Naval Brass : from Reed & Mikesell (1967) . . . 55
5.1 Electric Field Distribution for two modes of resonance - reproduced from 62 5.2 Electric Field Probe Coupling Impedance - second cavity port is termi-nated to 50Ω by S-parameter test unit . . . 64
6.1 Block Diagram of the Microwave Circuit . . . 70
6.2 Block Diagram of the Oscillator Circuit where Pc is the phase change between the cavity coupling probes and Pm is the phase change across microstrip traces on the printed circuit board. The MMIC amplifier will also have a phase change Pa between its input and output (not shown in figure) . . . 71
6.3 Plot of S21phase shift and magnitude between coupling probes in cavity running in TE(2,1,0) mode . . . 74
6.4 leq2 Diagram reproduced fromVisser (2007) . . . 76
6.5 lshortest Diagram reproduced from Visser (2007) . . . 77
6.6 Layout of Critical Phase Controlling Microstrip . . . 78
LIST OF FIGURES xv
6.8 Circuit Diagram of the Cavity Resonantor . . . 84
6.9 From left to right: R.F. Resonator, L.O. Amplifier in center with mixer
at the top, and L.O. Resonator . . . 85
7.1 Picture of Test Cavity and Cover Plate with SMA connector probes shown 90
7.2 Picture of Test Cavity with Cover Plate fitted and SMA connectors visible 91
7.3 Picture of Front and Back of SMA connector shorted to measure
electri-cal length of test setup . . . 92
7.4 S11 measurement of cavity probe 1 with cavity probe 2 tied to 50 ohms 93
7.5 S22 measurement of cavity probe 2 with cavity probe 1 tied to 50 ohms 94
7.6 Plot of Phase shift between cavity probe 1 and 2 verses frequency . . . . 95
7.7 Plot of coupling between cavity probe 1 and 2 verses frequency . . . 96
7.8 Circuit Diagram of the Transducer . . . 98
7.9 Connection of the Cavity Oscillator to the HP8565A Spectrum Analyser 100
7.10 A Pair of Spectrum Measurements of Cavity Resonator Output at 1 kHz
Resolution Bandwidth and 2 kHz frequency span per division . . . 108
7.11 Spectrum Measurement of Cavity Resonator Output at 1 kHz Bandwidth
and 10 kHz frequency span per division . . . 109
7.12 Spectrum Measurement of Cavity Resonator Output at 1 kHz Bandwidth
and 2 kHz frequency span per division with an approximate overlay of
the average signal . . . 110
7.13 Picture of Plastic Shielding Assembly . . . 111
LIST OF FIGURES xvi
7.15 Picture of Complete Printed Circuit Board Assembly . . . 113
7.16 Picture of Complete Transducer . . . 113
7.17 Picture of Redesigned Transducer with Brass Shield Fitted . . . 114
7.18 Picture of brass shield removed from transducer, showing conductive foam resonance absorbing material inside . . . 115
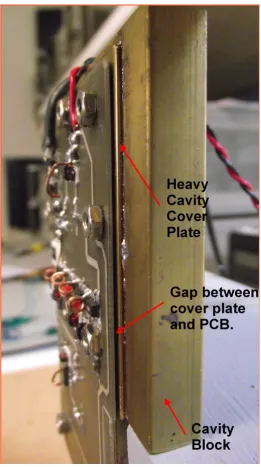
7.19 Close-up view of printed circuit board assembly to the transducer show-ing the mechanical isolatshow-ing gap . . . 116
8.1 Picture of the test jig showing load weight, power supply and test equip-ment . . . 118
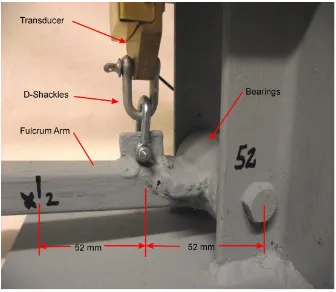
8.2 Close-up View of test jig showing locations of Transducer, D-shackles, Bearings and Fulcrum arm. Also shows major dimensions. . . 119
8.3 Graph of A1 results . . . 122
8.4 Chart comparing the means from data group A and B, also showing standard deviation error bars . . . 125
8.5 Graph of Hysteresis Measurement Results . . . 129
B.1 Picture of the complete group of microwave instruments . . . 155
B.2 Picture of the HP8510C Network Analyser . . . 156
B.3 Picture of HP8510C calibration tags . . . 157
B.4 Picture of the HP8514A S-parameter test set and the HP8350B sweep oscillator with HP83592A RF plug in . . . 158
B.5 Picture of HP8350B calibration certificate . . . 159
LIST OF FIGURES xvii
B.7 Picture of HP8510C calibration standards and connectors . . . 161
C.1 Result A1 Laboratory Table . . . 164
C.2 Result A1 Graph . . . 165
C.3 Result A2 Laboratory Table . . . 166
C.4 Result A2 Graph . . . 167
C.5 Result A3 Laboratory Table . . . 168
C.6 Result A3 Graph . . . 169
C.7 Result A4 Laboratory Table . . . 170
C.8 Result A4 Graph . . . 171
C.9 Result A5 Laboratory Table . . . 172
C.10 Result A5 Graph . . . 173
C.11 Result A6 Laboratory Table . . . 174
C.12 Result A6 Graph . . . 175
C.13 Result A7 Laboratory Table . . . 176
C.14 Result A7 Graph . . . 177
C.15 Result A8 Laboratory Table . . . 178
C.16 Result A8 Graph . . . 179
C.17 Result A9 Laboratory Table . . . 180
C.18 Result A9 Graph . . . 181
LIST OF FIGURES xviii
C.20 Result A10 Graph . . . 183
C.21 Result B1 Laboratory Table . . . 184
C.22 Result B1 Graph . . . 185
C.23 Result B2 Laboratory Table . . . 186
C.24 Result B2 Graph . . . 187
C.25 Result B3 Laboratory Table . . . 188
C.26 Result B3 Graph . . . 189
C.27 Result B4 Laboratory Table . . . 190
C.28 Result B4 Graph . . . 191
C.29 Result B5 Laboratory Table . . . 192
C.30 Result B5 Graph . . . 193
C.31 Result B6 Laboratory Table . . . 194
C.32 Result B6 Graph . . . 195
C.33 Result B7 Laboratory Table . . . 196
C.34 Result B7 Graph . . . 197
C.35 Result B8 Laboratory Table . . . 198
C.36 Result B8 Graph . . . 199
C.37 Result B9 Laboratory Table . . . 200
C.38 Result B9 Graph . . . 201
LIST OF FIGURES xix
C.40 Result B10 Graph . . . 203
C.41 Hysteresis Results Laboratory Table . . . 204
List of Tables
4.1 Ratio of Strength at Elevated Temperature Compared
to Strength at 21℃expressed as a Percentage . . . 49
7.1 Measured Signal Level for various Coupling Resistor Values . . . 99
7.2 Cavity Resonator Phase Noise Levels . . . 101
7.3 Drift of Cavity Resonator Frequency over Time . . . 102
7.4 Drift of Cavity Resonator Frequency over Time . . . 103
7.5 Drift of Transducer Intermediate Frequency over Time . . . 104
8.1 Data Collated from Group A Test Results . . . 123
Chapter 1
Introduction
1.1
Background
Modern society requires a very diverse range of weight and force measurements and
to meet this demand an equally diverse range of measurement technologies has been
developed. These technologies range from methods to determine the mass of
sub-atomic particles, right through to means of weighing bulk materials of many thousands
of tonnes. Some systems require extremely rapid response and settling times, while
others have more relaxed requirements. Yet other systems respond only to impulse
loads and discriminate static loads. In fact there are too many variations of system
requirements to mention here. The important point is that no single system can ever
cover all possible applications, so having available a diversity of technology options to
choose from for some particular weighing or force measurement application is vital.
The technology described in this dissertation relates to a technology that is intended to
offer another alternative, rather than being a replacement for any existing established
technology.
1.2
Hypothesis
1.3 Research Aims and Objectives 2
That the resonant frequency of a microwave cavity is set by its physical dimensions and
mode of resonance, and that changing the physical dimensions will change the resonant
frequency. So if the cavity is an integral part of a load bearing member, and strain is
induced in the member due to applied load, and the cavity is judiciously placed in the
member its physical dimensions will change. Thus by monitoring the cavity resonant
frequency, the strain in the load bearing member can be monitored, and transduction
from force (or load) applied to frequency has occurred.
Thermal changes in the load bearing member will cause changes in the physical
dimen-sions of the cavity due to expansion and contraction. It is proposed that this can be
discriminated from the desired signal by placing two cavities in the load bearing
mem-ber, one of which is strained by applied load and the other which is not. If the output
frequency is the mathematical difference between the two cavity resonant frequencies,
then the common mode temperature induced signal will cancel. The cavities must be
arranged to share a common thermal profile.
Using the difference frequency between the two cavity resonant frequencies should
pro-vide the added benefit of translating the microwave frequency signals in the cavities
down to much lower frequencies, without losing any of the desired information. This
would allow the use of lower cost electronics to process the output signal.
1.3
Research Aims and Objectives
There were five core aims and objectives in this research and they are detailed in the
sub-sections below.
1.3.1 Mechanical Member
The aim was to discover a mechanical design for a transducer which produces strain
in the loaded cavity in one co-ordinate direction only, so as not to produce complex
deformation of the cavity. In principle this would ensure good linearity between the
1.3 Research Aims and Objectives 3
the second cavity needs to be arranged to experience no strain when the first cavity
was loaded, but both cavities must be adjacent in a single block of metal to ensure
a common temperature profile. This member needs to be designed to meet all the
normal requirements, specifically low creep, high fatigue life and good stress-strain
linearity within Hook‘s law, but also has to be suitable for manufacture in a material
having low resistivity to maintain high Q values in the cavity resonators.
1.3.2 Cavity Exciter Circuit
Due to the finite Q of any practical resonant circuit, an exciter must be used to maintain
resonance. There are a number of systems used in the past, but modern active and
passive components and surface mount manufacturing techniques make loop feedback
type exciters with electric field coupling probes a likely choice.
An electromagnetic analysis needs to be undertaken for both shallow cylinder and
shallow square box cavities, and the methods of electrically coupling into each. The
resonant frequency sensitivity to cavity deformation in different co-ordinate directions
and modes of resonance should also be analysed. The advantages and disadvantages of
each, and the choice of a suitable cavity resonant frequency will be reported.
As previously mentioned, a possible microwave system design comprises a loop
feed-back type microwave oscillator using MMIC (monolithic microwave integrated circuit)
devices as the active components. The phase and magnitude data for coupling between
the cavity probes must be detailed, and an analysis of the design procedure for the
printed circuit board microstrip layout described.
1.3.3 Performance of Cavity Resonator
The microwave cavity resonators are a vital component in the transducer, and good
performance of the resonators is critical. Any noise, jitter or poor spectral response of
the resonators will translate directly into the output signal, degrading the quality of
1.3 Research Aims and Objectives 4
A test cavity needs to be constructed, along with coupling probes and exciter circuit.
This can then be used to measure key resonator performance indicators like:
• Centre Frequency
• Phase Noise
• 3 dB Bandwidth
• Drift
1.3.4 Construction of Complete Transducer
To achieve proof-of-concept a complete transducer unit needs to be constructed. This
would include the mechanical member with two cavities, exciter circuits and a
mi-crowave mixer, local oscillator and the intermediate frequency amplifier to extract
cav-ity resonator difference frequency signals. The microwave mixer, mixer local oscillator
amplifier, intermediate frequency amplifier and Faraday shielding must all be designed
and constructed.
1.3.5 Performance of Transducer
To test the transducer performance a jig needs to be designed and constructed to allow
known repeatable loading of the transducer. Sets of load tests should be performed
with the transducer output frequency monitored under each load condition. Analysis
of this data should provide the following:
• Frequency output change to load sensitivity
• Standard deviation of sensitivity
• Linearity
• Hysteresis
1.4 Structure of the Dissertation 5
1.4
Structure of the Dissertation
The dissertation comprises the following chapters:
• Introduction
• Literature Review : investigates previous work on using microwave cavity
res-onators to measure force, and loop feedback type exciters. Negative resistance
exciter systems are also reviewed.
• Initial Design Concepts and Microwave Cavity Measurements : details some initial
work on cantilever beam type mechanical members and a variety of other concepts
for the mechanical member.
• Mechanical Design of Transducer : reports on cavity geometry, properties of the
material in the member, and a mechanical design analysis of the chosen design.
• Microwave Resonator Theory : covers the choice of resonator frequency, resonator coupling, and resonator modes and sensitivity to cavity strain.
• Microwave System Design : describes the design procedure for the cavity exciters,
mixer local oscillator amplifier, microwave mixer and intermediate frequency
am-plifier.
• Resonator Performance : has a section that investigates the suitability of test
Equipment used, then details the tests and results of cavity resonator
perfor-mance.
• Prototype Transducer Performance Testing : introduces the test Equipment used,
method and results; and then provides a detailed analysis of the data.
Chapter 2
Literature Review
2.1
Introduction
The oldest archaeological evidence for weighing scales dates back to 2400 BC to 1800
BC, where polished stone cubes have been found in the Indus river valley (now Pakistan)
(Feuerstein et al. 2001). These cubes bear no markings, but their weights are multiples
of a common denominator. These stones were most likely used in a balance scale to
determine absolute weight, but it is thought that some form of balance scale was used
long before this to measure relative weight.
A simple cheap variant of the balance scale called a bismar became common around 400
BC, and was used by merchants (Crawford 1984). The bismar was a simple beam with
a fixed weight one end and a hook on the other end to attach the object to be weighed.
A handle with a knife edge pivot was used to suspend the unit, and the position of the
handle was adjusted until the beam was in balance. The weight of the object was then
read from calibration marks on the beam.
There are references to spring scales as early as 1600 AD, but the first reliable record
credits Richard Salter with the invention in 1770. By 1840 spring scales were in common
use due to the invention of the candlestick scale by R.W. Winfield (Graham 2003).
2.2 Measuring Mechanical Strain using a Cavity Resonator 7
atoms through to loads in ocean going bulk carriers. There is a great variety of
tech-niques and devices to perform these functions, and no single device fits all applications.
This document describes one technology variant for weighing, and is intended to
inves-tigate its potential as an additional option that may provide some unique advantage
for a specific application, rather than a replacement for any existing technology.
2.2
Measuring Mechanical Strain using a Cavity Resonator
Because the frequency of a cavity resonator is in part determined by the physical
dimensions of the cavity, then any change in dimension due to mechanical strain should
also change the resonant frequency of the cavity. The mechanical strain will in some
way be related to the cavity frequency change, so mechanical strain, and hence load,
can be measured by monitoring the frequency of the cavity resonator.
Some early work was done with this concept for use in nuclear reactors. The cavity
resonator was tolerant of high radiation and high temperature environments, where
other technologies failed. An instrument for measuring strain in nuclear fuel cladding
is described in Billeter (1977), and works on the basic principle of change in cavity
dimension due to mechanical strain causing a change in resonant frequency. The
in-strument described is quite complex and further relevance to this project is limited,
because it uses a complex instrumentation scheme designed to keep most of the
in-strument remote from the measuring cavity due to the hostile working environment of
the cavity. Further to this, the paper is quite old and the equipment and methods are
outdated.
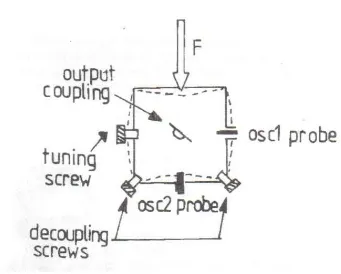
A more relevant system was described in Farley et al. (1991), where a single cavity
had two oscillators running orthogonal to each other, with the assumption that the
oscillators were decoupled. This system had the advantage of requiring only one cavity,
and could provide temperature compensation because both oscillators were equally
effected by expansion and contraction in the cavity. The oscillators have probes placed
in two walls perpendicular to each other and the difference frequency is tapped off via
2.2 Measuring Mechanical Strain using a Cavity Resonator 8
Figure 2.1: Conceptual layout of cavity with two orthogonal resonators - reproduced from
2.2 Measuring Mechanical Strain using a Cavity Resonator 9
One of the assumptions is that the two oscillators are decoupled, and this is unlikely
when they are both running in the same cavity. The authors talk about this issue and
detail tuning screws for decoupling and the need for finely adjusting the screws and
oscillator probe lengths.
The method of loading the cavity causes non-linear bulging of the cavity walls as shown
in fig. 2.2, and this is likely to cause non-linearity between the applied load and change
in output frequency. They claim good linearity but only detail this up to a modest 10
kg load.
Figure 2.2: View of the Farley et al. (1991) cavity cross section under load - reproduced
from Fig 5.
Finally, the oscillators are an old negative resistance type. This method had its
2.3 Force Measurement and Transduction Options 10
field effect transistor oscillators. While they were adequate and relevant at the time,
and may still find some application in low cost devices, there are better options available
now.
This project aims to incorporate the better features of the Farley et al. (1991) design,
and improve on some of the disadvantages. It is also a goal to use modern electronics
for the oscillators and signal processing blocks.
2.3
Force Measurement and Transduction Options
With the exception of direct weight comparison devices like balance scales, the majority
of force or weight transducers depend on the elastic deformation of a mechanical element
within the linear boundaries of Hooke’s law, with some device to measure the strain or
displacement in the mechanical member.
2.3.1 Strain Gauges
The electrical strain gauge is a transducer that changes its resistance when it is strained
by displacement (Mackay 1994). The basic concept is that a strain gauge being
length-ened by strain in the member it is bonded to, causes the cross-sectional area of the
conducting elements in the gauge to reduce, hence increasing the resistance of the
gauge. The converse argument can be made for a strain gauge being compressed. The
formula used is Equ 2.1.
R=ρLo
A (2.1)
where:
R is the resistance in Ω ρ is the resistivity in Ω.m Lo is the length in m
2.3 Force Measurement and Transduction Options 11
In strain gauges the fractional change in resistance is more important than the total
resistance of the gauge. The gauge resistance is important to set the d.c. operating
point, but the strain data is contained in the fractional change of resistance, which is
defined by Equ. 2.2.
∆R Ro
= (1 + 2σ)∆L L0
+∆ρ
ρ (2.2)
where:
∆R
Ro is the fractional change in resistance σ is Poisson’s ratio
∆L
Lo is the fractional change in length ∆ρ
ρ is the fractional change in resistivity
From this the gauge factor of the strain gauge can be deduced, and is shown in equ.
2.3. GF = ∆R Ro ∆L Lo
= 1 + 2σ+ ∆ρ
ρ
∆L L
(2.3)
A strain gauge is designed to respond to change in its length, however expansion and
contraction of the elastic member the gauge is bonded to will cause the gauge to change
length. Thus a single strain gauge is an effective strain sensor, and an equally effective
temperature sensor. A method has to be devised to discriminate the effects of
temper-ature change. The usual method is to use at least two strain gauges in a wheatstone
bridge arrangement, where a loaded elastic member will cause one gauge to be stretched
and the other to be compressed. When the gauges are correctly placed in the bridge the
output due to load will be doubled. However temperature change causes both gauges
to be equally changed in length, and this is cancelled in the bridge circuit. High quality
strain gauge systems usually use four strain gauges, with one gauge in each leg of the
bridge.
The most common form of strain gauge is the foil type. The gauge consists of an
2.3 Force Measurement and Transduction Options 12
backing. Most modern foil strain gauges also have a protective plastic layer bonded
over the top surface of the gauge. When strain occurs in the mechanical member that
the gauge is bonded to, then the fine foil traces along the length of the gauge are
either stretched or compressed. When a foil trace is stretched its cross-sectional area
is reduced and it electrical resistance increases, with the opposite happening when the
trace is compressed - as per Equ. 2.1. Gauges are usually arranged so mechanical strain
is arranged along the length of the foil traces, with short end connections between the
traces providing reduced sensitivity to strain in other directions. The gauge is then
bonded to the mechanical elastic member using special glues, and it is particularly
important that there is no creep in the glue line, otherwise the system will gradually
drift off zero. Creep in the glue line will allow long term relative movement between the
gauge and the mechanical member, and this movement is what causes the zero offset.
This is a particular problem if a static load is applied to the elastic member for a long
period of time. To achieve a glue line of this quality involves a costly and complex
surface preparation and glue curing procedure. Poor control of these procedures will
lead to a high production defect rate, and premature failure of products.
Strain gauge based wheatstone bridge circuits have a very low level differential signal
sitting on a high level common mode voltage. This requires a specialised analogue
circuit to amplify the differential signal whilst providing a high common mode rejection
ratio (CMRR). These systems are very prone to moisture and temperature changes,
and require special consideration of these issues to maintain sufficient stability. Modern
electronics is rapidly moving toward system on a chip technology, where minimization
of analogue circuitry is an advantage. Strain gauges are still a viable technology, but
no longer match modern circuit techniques quite so well anymore.
2.3.2 Mechanical Resonant Systems
The most basic mechanical resonant system includes a long steel wire attached to the
side of the elastic load bearing member in such manner that the tension in the wire
changes as the elastic member strains. The steel wire is also electrically insulated from
the elastic member, and is coerced into resonant oscillation by placing a permanent
2.3 Force Measurement and Transduction Options 13
The magnetic field induced around the wire by the alternating current couples with the
magnetic field from the permanent magnet, and provides an alternating force on the
wire. When the frequency of the alternating current is close to the resonant frequency of
the wire, the amplitude of the oscillation in the wire increases. The resonant frequency
is related to the tension in the wire by the well known equation 2.4 (Halliday & Resnick
1977).
fn=
1 λn
v = n 2L
s
T
µ (2.4)
Where:
L = length of wire ( m)
T = tension of wire (N)
µ= wire mass per unit length (kg/m) v = wave propogation speed (m/s)
λ= wavelength (m)
fn = resonant frequency (Hz)
A more developed version of this concept is described by Yan et al. (2003) where thin
stainless steel resonantors are made, with piezo-electric drivers and detectors screen
printed onto the resonator. The triple beam tuning fork resonator consists of a
stain-less steel device 15.5 mm long, 0.25 mm thick, 2 mm wide centre beam and two 1
mm wide outer beams. A feedback closed-loop circuit can maintain the resonator in
resonance while loads are applied to the resonator, resulting in changes in its resonant
frequency. The circuit outputs a digital frequency signal for measurement, which
inte-grates very well with modern circuit techniques. Unlike strain gauge systems, no costly
and sensitive analogue circuitry is required. The designers also claim a higher overload
capability than strain gauge based systems.
The authors used an epoxy-phenolic adhesive to attach the resonators to the elastic
member, but later note that a bolted system would be better. The resonator would
also be suitable for resistance welding to the elastic member, providing an even more
2.3 Force Measurement and Transduction Options 14
Some of the issues with this design include the effects of mechanical impacts and
vi-bration disturbing the resonant mode of the resonator, and that the resonator must
operate in free space so potting for environmental sealing is not an option.
2.3.3 Hydraulic Systems
Hydraulic force measurement systems have existed for a long time, and involve
apply-ing the force to be measured to a piston or diaphragm and monitorapply-ing the pressure
produced. The pressure generated will equal the force divided by the area of the piston
or diaphragm, less frictional or flexural forces in the system. Nothing is really gained
with these systems as some method of measuring the pressure is still required, and the
hydraulic circuitry is a source of additional errors. The notable exception may be when
a hydraulic circuit already exists and precise measurement is not required. Some
card-board baler controllers utilise a hydraulic pressure switch that has a set point pressure
at which the switch contacts change over. This switch changeover is used to indicate
the bale of cardboard is full, based on the simple concept that the baler has supplied
its maximum designed force onto the bale and has not driven the pressing apparatus
to the bottom of its movement stroke as detected by a limit switch.
2.3.4 Fibre Optic Systems
Optical fibre sensors offer many advantages including immunity to electromagnetic
interference and the ability to locate sensitive electronic equipment away from shock,
temperature variations and other environmental disturbances (Vaziri & Chen 1991). If
sensitivity is the main consideration then optical interferometric sensors have no equal,
whereas multimode fibre sensors with LED light sources and p-i-n diode detectors are
preferred if simplicity and robustness are important.
The basic principle is to perturb the optic fibre in some way so as to alter its light
transmission characteristics. Many methods have been developed to perturb the fibre,
including gauge heads designed to convert longitudinal and/or transverse stress to fibre
2.4 MMIC based Oscillators 15
1982), and a roller chain like device with the fibre threaded through the chain (Mavin
& Ives 1984). Many other variations exist including microbend sensors in which threads
are wound around the glass fibre, and tactile sensors in which force is converted to fibre
deformation.
Many of the issues with drift and hysteresis in multi-mode fibre strain sensing systems
can be traced to the structure used to perturb the fibre. Etched fibres have been
developed to try to minimise these effects (Vaziri & Chen 1991).
2.4
MMIC based Oscillators
The GaAs (gallium arsenide) MESFET (metal-semiconductor field effect transistor) was
the first practical device suitable for MMIC (monolithic microwave integrated circuit)
applications, and was investigated by Mead (1966) and Hooper & Lehrer (1967). The
first practical MMIC devices were used by the US military in the early 1970’s as low
noise amplifiers for military and space applications. Fairchild released a device with
11dB gain at 8 GHz in 1976 (Bechtel 2003). Current devices use technology like InGaP
but retain the basic characteristics of the earlier devices. The defining advantages of
MMICs are their ruggedness and the uniformity of devices which eliminates the need
for trimming or adjustment of circuits. They are also relatively low cost and suited to
modern automated assembly processes.
There have been a wide variety of cavity oscillators used, with negative resistance
de-vices being the most common. Section 2.5 talks at some length about the design process
for this type of resonator, so in this section MMIC based loop feedback resonators will
be focused on.
Resonators based on MMIC amplifiers are feedback oscillators with two coupling ports
into the cavity (Barth 2000). They depend on 360 electrical degrees of phase shift
be-tween the two coupling ports, and sufficient gain in the MMIC amplifier to compensate
for weak coupling to the cavity. This oscillator configuration requires a loop analysis
2.4 MMIC based Oscillators 16
Figure 2.3: Setup of the Barth (2000) feedback oscillator clearly showing the two coupling
2.4 MMIC based Oscillators 17
Leeson’s Equation (Leeson 1966) describes the phase noise in the 1/f2 region, and is reproduced in Equ. 2.5.
L(∆ω) = 10log(2kT F Ps
( ω
2Q∆ω)
2) (2.5)
where:
L(∆ω) = phase noise (dbc/Hz) k=Boltzman’s constant (J/K) T = temperature (K)
F = device’s noise factor (dBc/Hz) Ps=power in resonator (W)
∆ω =offset frEquency (rad/s) ω=angular frEquency (rad/s) Q=resonator loaded quality factor
Because low phase noise will lead to a spectrally purer signal to monitor cavity strain,
then the aim is to reduce the numerator and/or increase the denominator in Equ. 2.5.
By inspection it can be seen that increasingPs orQwill reduce phase noise. However
doublingPsreduces phase noise by 3dB whilst doublingQreduces phase noise by 6dB.
The two main sources of loss in the cavity are dielectric loss and metallic loss due to
finite surface conductivity. If the dielectric is air then the loss is negligible. Any high
conductivity metal will give reasonable Q factors, and silver plating the inside of the cavity will also increase conductivity.
Barth (2000) states ”a gain as high as possible allows weak coupling to the resonator
resulting in doubling the Q-Factor or improving the phase noise by nearly 6dB”. So
a high gain in the feedback amplifier allows weak coupling to the cavity, and hence
2.5 Prior Methods of Realising a Cavity Oscillator 18
compensate for weak coupling to the cavity and other losses in phase shift devices.
The volume of work on cavity oscillators seems to decline before the availability of
suitable low cost MMIC devices, due to the industry shifting towards dielectric resonant
oscillators, because they are smaller in size, cost and weight than equivalent metal
cavities, and can be very easily incorporated into microwave integrated circuits and
coupled to planar transmission lines (Pozar 2005). With the continued development
of high frequency devices that can directly operate in the microwave bands, many
direct frequency generation methods have been devised, especially for mobile devices
like phones. These direct frequency generation methods allow greater device flexibility
like frequency hopping.
In recent years there has been a renewed interest in cavity resonators, in an attempt to
improve the spectral purity of oscillators. The limitation of a high spectral purity
on-chip oscillator is the integrated resonator, and Khalil et al. (2011) describes a method
to integrate a cavity resonator onto a GaAs MMIC chip.
There is sufficient work done in this area of loop feedback MMIC cavity resonators to
indicate the viability of the system for this application.
2.5
Prior Methods of Realising a Cavity Oscillator
The following sub-sections detail some of the considerations in designing a cavity
oscil-lator using junction transistors or field effect transistors.
2.5.1 Oscillator Theory
According to Hodowanec (1974), at microwave frequencies, the most effective transistor
configuration for an amplifier is the base mode of operation. The
common-base configuration provides higher gain, efficiency, and stability at frequencies above
the transistors fT than any other configuration. Oscillators are a form of regenerative
2.5 Prior Methods of Realising a Cavity Oscillator 19
Figure 2.4: Oscillator Equivalent Circuit : partly reproduced from Materka & Mizushina
(1982)
common-base oscillator is the Colpitts circuit (Millman 1979, p653), because it makes
use of a tapped capacitor circuit to provide the correct feedback. Often part of this
capacitance network can be provided by parasitic package capacitance of the transistor.
Materka & Mizushina (1982) have shown that a cavity oscillator can be constructed
using stripline circuitry that is frequency locked to the cavity resonant frequency via
probe coupling. They have used a coaxial transformer to match the active device
admittance to the admittance of the cavity and probe coupling mechanism.
Materka & Mizushina (1982) work also involved an inductive window in the cavity to
couple multiple oscillators. By deleting this feature and using their equivalent circuit,
the circuit shown in Fig. 2.4 was drawn, where the active device is represented by Yd
whose admittance YD(A, f) has its real part negative in a certain frequency range,
where A is the amplitude of RF voltage across the device terminals at frequency f. The LCR parallel circuit represents the cavity. Xp is the probe reactance and the
ideal transformer (n1: 1) represents the probe coupling. Zt denotes the characteristic
impedance of the coaxial transformer whose length is lt.
Materka & Mizushina (1982) also used the well known condition for sustained steady
2.5 Prior Methods of Realising a Cavity Oscillator 20
seen from port a-a’ (Fig. 2.4) looking toward the cavity:
−YD(Ao, fo) =YL(fo) (2.6)
whereAo and fo are respectively the amplitude and frequency of oscillation.
2.5.2 Impedance Transformers
However, the coaxial transformer described by Materka & Mizushina (1982) is a three
dimensional mechanical structure not well suited to modern microwave stripline
con-struction methods. A stripline impedance transformer would have considerable
manu-facturing benefits. Womack (1962) in his paper titled ”‘The Use of Exponential
Trans-mission Lines in Microwave Components”’ describes a tapered line section suitable for
making this transformation. Tapered line sections can perform similar transformations
to standard stripline impedance transformers, but at reduced size.
According to Womack (1962) a tapered line is defined by:
Ko(x) =Ko1e(δx) (2.7)
Where Ko1 is the impedance at x = 0, and δ is the rate of taper. There are two conditions in which impedance transformers are applied - see Fig. 2.5.
For Fig. 2.5 (a) where ZL
Ko2 >>1 then
Zs
Ko2
= jX(ω) Ko2
+ Z¯ Ko2
(2.8)
WhereX(ω) =Ko2F(ω) and
¯
Z = Ko1Ko2 ZL
2.5 Prior Methods of Realising a Cavity Oscillator 21
Figure 2.5: Tapered Stripline Transformers reproduced from Womack (1962)
and for Fig. 2.5 (b) whereZL<< Ko1 then
Zs
Ko1
= 1
jKo1B(ω) +Ko1Y¯
(2.10)
where ¯Y = ZL
Ko1Ko2 and
B(ω) = F(ω) Ko1
(2.11)
F(ω) can be obtained in the graphs in Fig. 2.6, where βo= 2λπ.
Also the minimum length of the line was calculated using equ 2.12.
lo= λ
2
1− δ2
4β2 12
(2.12)
Select |δβ| between 0 and 2. The larger βδ the shorter the line.
2.5 Prior Methods of Realising a Cavity Oscillator 22
Figure 2.6: Variation ofF(ω) with frequency for various values of the ratio βδ
o reproduced
2.5 Prior Methods of Realising a Cavity Oscillator 23
Figure 2.7: Two-port transistor oscillator circuit - reproduced from Kai Chang & Nair
(2000)
slight increase in length.
2.5.3 Criteria for Cavity Oscillation
Referring to Fig. 2.7 and Kai Chang & Nair (2000) - the terminating network is used to
provide|Γout|>1 (or Rout<1), which is a necessary condition for oscillation to start.
The load network incorporates the probe and cavity, and determines the oscillation
frequency.
Using transistor S-parameters the stability factor of the device is calculated from equ
2.13.
K = 1− |S11| 2− |S
22|2+|S11S22−S12S21|2 2|S12S21|
(2.13)
and will be less than 1 for potentially unstable devices. The conditions for oscillation
were expressed as:
2.5 Prior Methods of Realising a Cavity Oscillator 24
ΓinΓT = 1 (2.15)
ΓoutΓL= 1 (2.16)
or expressed another way:
|Rout(V, fo)|> RL(fo) (2.17)
Xout(V, fo) +XL(fo) = 0 (2.18)
whereRout is a negative resistance.
According to Kai Chang & Nair (2000) the following basic steps can be followed to
design a transistor oscillator :
• Select a potentially unstable transistor at the frequency of oscillation, or use
feedback elements to make it unstable.
• Design the terminating network,ZT or ΓT, to make|Γout|>1 by choosing ΓT or
ZT in the unstable zone of the stability circle.
• FromZT and the transistor small signal S-parameters, calculate Γout and confirm
|Γout|>1.
Γout=S22+
S12S21ΓT
1−S22ΓT
(2.19)
|Γout|>1 (2.20)
• Choose the load according to the oscillation condition as follows:
XL(fo) =−Xout(fo) (2.21)
RL(fo) =
1
2.5 Prior Methods of Realising a Cavity Oscillator 25
The chosen value for ZL usually produces a working oscillator. The measured
oscillation frequency will be shifted from the design value, since Xout(fo), used
in determiningfo, is assumed to be independent of the amplitude V.
• Design the load matching network to transform a 50Ω load toZL.
The output load in this design will be the circuit to find the difference frequency between
the two cavity oscillators. The impedance was selected to be the industry standard 50Ω.
The negative resistance Rout is a function of voltage and as the oscillation power is
increased, the negative resistance value reduces. If the negative resistance value reduces
to a value below the load resistance, oscillation ceases. To overcome this problem the
magnitude of the negative resistance at V = 0 was designed to be much larger than the load usingRL(fo) = 13|Rout(0, fo)|.
Stability circles were plotted on a Smith chart to indicate areas whereK <1 (Bowick 1997). The perimeter of the circle represents a locus of points whereK = 1, and either the inside or the outside of the circle can represent the unstable region. The following
was used to calculate the stability circle:
Ds=S11S22−S12S21 (2.23)
C1 =S11−DsS22∗ (2.24)
C2=S22−(DsS11∗ ) (2.25)
The centre of the input stability circle was calculated using:
rs1 =
C1∗
|S11|2− |D
s|2
2.5 Prior Methods of Realising a Cavity Oscillator 26
and the radius of the input stability circle was calculated using:
ps1 =|
S12S21
|S11|2− |Ds|2
| (2.27)
The centre location of the output stability circle was calculated using:
rs2 =
C2∗
|S22|2− |Ds|2
(2.28)
And finally, the radius of the output stability circle was calculated using:
ps2 =|
S12S21
|S22|2− |Ds|2
| (2.29)
Using this data the stability circles were then plotted on a Smith chart. In most cases
transistors are stable at 50Ω, so S11 and S22 will be less than 1. S11 and S22 would be greater than 1 for an unstable transistor. The centre of the normalised Smith chart
must be part of the stable region, and if the stability circle surrounds the centre of the
Smith chart, then the inside of the circle is the stable region. Alternatively, if the circle
does not surround the center of the chart, the entire area outside the circle represents
Chapter 3
Initial Design Concepts and
Microwave Cavity Measurements
3.1
Introduction
This chapter outlines the some of the formative thought processes and investigation that
ultimately led to the outcomes detailed in future chapters. The first half of the chapter
covers some of the design iterations in regard to the mechanically loaded member, and
the second half investigates prior methods of realising and designing cavity oscillators.
3.2
Mechanical Designs
Several options for mechanical designs have been investigated in an attempt to find
a method of producing predictable and geometrically simple deformation in a loaded
cavity within a cantilever beam. Initially investigation focused on options where one
cavity would be compressed and the other expanded in structures like the beam shown
in Fig.3.1, thus giving maximum frequency shift for a given load. However no
solu-tion was found that did not produce complex cavity deformasolu-tions. Several versions
of beam design were drawn on 3 dimensional computer aided drafting package (Alibre
3.2 Mechanical Designs 28
Figure 3.1: Simple Cantilever Beam
(ALGOR Design Check - version 23.1). One of the later variants is shown in Fig.3.2,
however they all produced complex deformation of the cavities.
In an attempt to produce cavity deformation that allowed the cavity to remain close to
square with relatively straight sides, strain control holes were investigated. A variant
of this design is shown in Fig. 3.3 and some displacement data from analysis is shown
in Fig. 3.4. While this does to some degree make the deformation of the cavities more
geometrically simple, it also localizes most of the strain into the strain control holes
which is undesirable.
A beam was then devised that would bow in the center by having two support points
at either end, and two load points at either end but displaced from the support points.
3.2 Mechanical Designs 29
3.2 Mechanical Designs 30
3.2 Mechanical Designs 31
Figure
3.4:
Displacemen
t
of
Beam
with
Strain
Con
trol
Holes.
The
colour
bar
sh
o
ws
displacemen
t
in
3.3 Investigation of Cavity Coupled Microwave Oscillators 32
and the upper cavity is compressed. The curvature introduced into the cavity is in
the co-ordinate direction in which there is no resonant mode (see Chapter 5: sections
5.3 to 5.5), so this would possibly not effect the performance electrically. However this
arrangement is difficult to provide with electrical coupling devices located in a single
coplanar printed circuit board.
A block was then devised that was designed to be subjected to compression loads. This
design is shown in Fig. 3.6 and a series of automatically generated images of stress,
strain and deformation from finite element analysis simulation results are shown in Fig.
3.7. The block dimensions were selected in an intuitive manner starting with the cavity
dimensions of 40 x 40 mm, as this gave manageable resonant frequencies. If this design
was further investigated then dimensional data would have been selected in a more
formal manner, with a focus on achieving certain strain to load ratios. Mechanically
this again exhibited properties that provided measurement cavity deformation mainly
in one co-ordinate direction with the general shape of the cavity remaining rectangular,
but was also difficult to make electrical couplings to the cavities from a single printed
circuit board.
3.3
Investigation of Cavity Coupled Microwave
Oscilla-tors
A lot of work was done to investigate the merits of prior art technology for the current
project. While most of this was ultimately rejected as being unsuitable, this did provide
valuable background information and is detailed in Chapter 2: Section 2.5. The final
decision was to try and use MMIC technology which did not exist when most of the
concepts in Chapter 2 were current. MMIC technology is available in surface mount
packages, is well adapted to modern assembly methods and is readily available at low
3.3 Investigation of Cavity Coupled Microwave Oscillators 33
Figure
3.5:
Displacemen
t
of
Bending
T
yp
e
Beam
under
3.3 Investigation of Cavity Coupled Microwave Oscillators 34
3.3 Investigation of Cavity Coupled Microwave Oscillators 35
3.4 Impedance of a trial Cavity and Probe 36
3.4
Impedance of a trial Cavity and Probe
A pair of 40 mm by 40 mm by 10 mm cavities were machined in a 6061T6 Aluminium
beam, as shown in figure 3.8. This design is the equivalent of that shown in Fig. 3.5.
A probe as shown in Fig. 3.9, is mounted in a plate as shown in Fig. 3.10. The plate
assembly is then mounted to the aluminium beam to close the cavities, as shown in
Fig. 3.11.
The cavity was then scanned over a range of frequencies from 5.1 GHz to 5.3 GHz using
an HP8720 Network Analyser, and a data file of frequency verses complex reflection
coefficients were obtained. Two different probes were used with tip lengths of 3 mm
and 5 mm, with data being recorded for both.
The reflection coefficient must be converted to a complex impedance at each frequency
point. This conversion was computed using Matlab. The reflection coefficient is
de-scribed in equ 3.1.
Γ = ZL−Zo ZL+Zo
(3.1)
By rearranging this can be converted to equ 3.2.
ZL=Zo
1 + Γ
1−Γ (3.2)
The network analyser is a standard load, so assume Zo = 50 Ω. The results of this
3.4 Impedance of a trial Cavity and Probe 37
Figure 3.8: Picture of Cavities
3.4 Impedance of a trial Cavity and Probe 38
Figure 3.10: Picture of the Probe and Cavity Cover Plate Assembly
3.4 Impedance of a trial Cavity and Probe 39
Figure 3.12: Comparison between Impedance Phase and Magnitude for 40 mm Cavity with
3.4 Impedance of a trial Cavity and Probe 40
Figure 3.13: Comparison between Impedance Phase and Magnitude for 40 mm Cavity with
Chapter 4
Mechanical Design of Transducer
4.1
Introduction
This chapter outlines the important characteristics of cavity strain in this
applica-tion, and continues on to investigate important properties of the mechanical member.
Physical properties of the mechanical member like the relationship between Young’s
modulus and temperature, stress concentration, fatigue, creep, corrosion and electrical
properties are considered. The preferred mechanical design is introduced, and strain
calculations are outlined.
4.2
Cavity Geometry
A large variety of geometrical shapes and many more random shapes can function as a
resonant cavity, however performance of the cavity is difficult to define mathematically
if anything other than simple geometric shapes are used. Further, it is usually easier
to machine simple geometric shapes, and maintain accuracy and repeatability. So this
limits the set of choices for cavity shape to rectangular, square, cylindrical and spherical.
Due to machining difficulty spherical shapes were immediately abandoned, and square
shapes are simply a subset of rectangles. To control the higher order resonance modes,
4.2 Cavity Geometry 42
In this application it is important to have a well defined mechanical relationship between
cavity strain and applied load. It is also desirable to have this strain act totally in one
co-ordinate direction, which provides a simple relationship between applied load and
cavity resonant frequency. It would be difficult to machine a cylindrical hole into a
loaded member and have this well defined strain to load relationship if the cylinder was
strained in a radial direction. A cylindrical hole will tend to elongate in one co-ordinate
direction, and pull inward in an orthogonal co-ordinate direction producing a complex
deformation of the cylindrical hole. This in turn produces a complex relationship
between cavity resonant frequency and applied load. For a rectangular cavity the
resonant frequencies are given by Pozar (2005) as:
fm,n,l= (
c 2π√µrr
)
r
(mπ a )
2+ (nπ b )
2+ (lπ d)
2 (4.1)
where:
fm,n,l= cavity frequency for mode m, n, l
µr= relative permeability of material filling cavity
r = relative permittivity of material filling cavity
m, n, l= number of variations in standing wave pattern inx, y, z directions a, b, d= cavity dimensions inx, y, z directions
c= velocity of light in free space
See Fig. 5.1 for a graphical representation of the variables in Equ. 4.1.
4.2.1 Cylindrical Cavities
It is possible to strain a cylindrical hole in its axial direction and achieve good linearity.
Hylarides bridge configuration (Carlton 2007) is an example of a strain gauge based
system that uses axial strain in a cylinder or shaft as the basis of a transducer
mechan-ical element. However as covered in the chapter on Microwave Resonator Theory, a
4.2 Cavity Geometry 43
4.2.2 Square Cavities
If a square cavity is used, then it can be designed with two thin web walls co-planar
with the direction of applied load, and with the load applied so the web walls are
under tension. This provides a mechanical arrangement where the cavity dimensions
mainly change only in one co-ordinate direction, with little change in other directions.
A design of a cavity using this principle is shown in Fig. 4.1. To prove the validity of
this concept the design was constrained in a finite element analysis package as shown
in Fig. 4.2, with the triangles on the two abutments being where the transducer would
be rigidly bolted to a support structure and would represent full movement constraint
at these faces, and the applied load is represented by the series of six green arrows at
one end of the structure. Finite element analysis was performed on this with a load of
1000 N and the strain results are shown in Fig. 4.3.
From Fig. 4.3 three very important observations were made:
Firstly, the reference cavity at the end most distant from the applied load is virtually
unstrained, which means its frequency of resonance will not alter significantly as load
is applied. However this cavity shares a common temperature profile with the
mea-surement cavity and can be used to compensate for ambient temperature variation.
Second, the arrow head shaped block that the load is applied to has shown some
strain due to the lighter shading, but this strain is very nearly uniform as indicated
by the constant shading colour across the section. This indicated that the face of the
measurement cavity closest to the applied load must be remaining very close to straight.
Also the measurement cavity face farthest from the applied load also must be remaining
straight due to the absence of strain in the web between the measurement and reference
cavities. This indicated that a simple one dimensional change of cavity shape due to
applied loads is very nearly achieved, making the analysis of cavity resonant frequency
change verses applied load very simple.
Lastly, it can be seen that all the strain is concentrated in the side webs of the
mea-surement cavity, and that this strain is uniformly distributed along the length of the
4.2 Cavity Geometry 44
mechanical failure. The inside corners of the cavities have a fillet curve which also
helps reduce stress concentration, and naturally allows a rotating mill tool to cut out
the cavity.
The assumption made is that the fields in the corners are small and the corner radii
have a negligible effect on the cavity resonant frequency. These corner radii can be
considered to be cavity perturbations, and Pozar (2005) has a Section 6.7 ”Cavity
Perturbations” with a Subsection titled ”Shape Perturbations”. This section details a
method to calculate the change in resonant frequency due to small changes in cavity
shape. The method works on the idea that the amount of stored magnetic or electric
field is altered by the cavity perturbation. Pozar (2005) developed Equ. 4.2.
ω−ωo
ωo
= ∆Wm−∆We Wm+We
(4.2)
where:
ω= perturbed cavity resonant frequency ωo=original cavity resonant frequency
∆Wm= change in stored magnetic field energy
∆We=change in stored electric field energy
Wm = original stored magnetic field energy
We= original stored electric field energy
The perturbation method predicts a frequency shift due to the corner rounding in the
right direction, but only slightly more than half that measured. There are some doubts
associated with this calculation as the size of the corner radius probably exceeds the
definition of ’small changes in cavity shape’.
From Section 5.5 the calculated resonant frequency is:
f2,1,0 = 8.3794 GHz
4.3 Choice of Materials for the Mechanical Element 45
f2,1,0 = 8.2675 GHz
This is a difference of 0.1119 GHz or 1.33 % of the calculated resonant frequency. Some
of this discrepancy is certainly due to machining imperfections (run-out, taper and
machining marks) as the cavities were made on a basic hand operated milling machine.
It was observed that the location and length of the coupling probes also seemed to
slightly alter the resonant frequency, and the frequency shift due to coupling pro