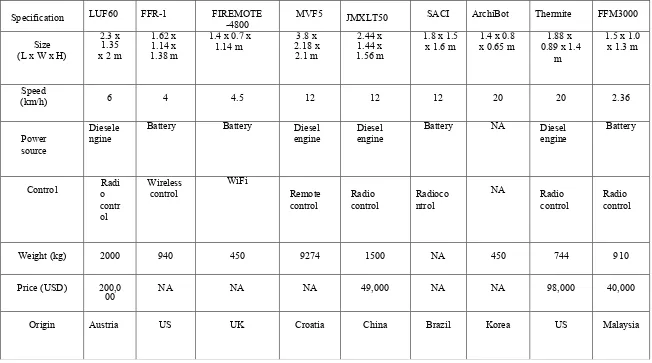
Design Of Transport Trailer For Fire Fighting Robot
Full text
Figure


Related documents
International Journal of Scientific Research in Computer Science, Engineering and Information Technology CSEIT195386 | Received 10 June 2019 | Accepted 01 July 2019 | July August 2019 [
Factors that contribute to the lower recurrence rate include tension free placement of the mesh with wide coverage of the hernial defect; approaching the hernial defect from a
The coordinator node on checking the sensor value for the range condition varies the time interval accordingly and sends the data over the internet to a Google spreadsheet. The out
RESEARCH ARTICLE Open Access Antenatal care in practice an exploratory study in antenatal care clinics in the Kilombero Valley, south eastern Tanzania Karin Gross1,2*, Joanna
Wireless Localization for mmWave Networks in Urban Environments EURASIP Journal on Advances in Signal Processing Ruble and G?ven? EURASIP Journal on Advances in Signal Processing
WORLD JOURNAL OF SURGICAL ONCOLOGY Chen et al World Journal of Surgical Oncology 2014, 12 106 http //www wjso com/content/12/1/106 CASE REPORT Open Access Metastasis of distal
Existence and uniqueness of weak solutions for a class of fractional superdiffusion equations Qiu et al Advances in Difference Equations (2017) 2017 1 DOI 10 1186/s13662 016 1057 2 R E S
