Theses
Thesis/Dissertation Collections
5-3-1988
Port-a-map
Viriya Pungthong
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
A
Thesis
Submitted
to the
Faculty
otThe
College
ofFine
andApplied Arts
in
Candidacy
for
the
Degree
ofMASTER OF FINE ARTS
PORT-A-
MAP
by
Viriya
Pungthong
Adviser:
Prof. Craig McArt
Date :
-=..5~_._4L...-·----"'~_"8'~
_
Associate Adviser:
Prof. James Sias
Date :
!.:}
I6·
~
tJ6
Associate Adviser:
Prof. Toby Thompson
Date :
,5= '
& -
g-
g-Special Assistant to the
Philip M. Bornarth
Dean for Graduate Affaji
A
Date :
5;?-7
'if
~
I
Dean. College of
Dr. Robert H. Johnston
Fine
&
Applied
1
S
:
J~
y
Date:
C;
q,
/.t!j?
I
t
I, Viriya Pungthong, hereby grant permission to the Wallace Memorial Library of RIT, to reproduce
my thesis in whole or in part. Any reproduction will not be for commercial use or profit.
Viriya Pungthong
CHAPTER
I
PROBLEM DEFINITION
3
CHAPTER
III
PRINCIPLES OF NAVIGATION
8
CHAPTER
IV
STATE OF THE ART
12
CHAPTER
V
HUMAN FACTORS
18
Man-Machine
Interaction
1 8
The
Human-Computer
Interface
34
CHAPTER
VI
DESIGN
ANALYSIS
46
CHAPTER
VII
DESIGN DEFINITION
62
CHAPTER
VIII
DESIGN
DEVELOPMENT
63
CHAPTER
DC
FINAL DESIGN
91
CHAPTER
X
EVALUATION
AND
IMPLEMENTATION
96
INTRODUCTION
The
purpose ofthis
thesis
is
to
develop
high level design interactions
between
people andintelligent
electronicsto
help
in
ourdaily
lives.
The
design
willbe
atool
for
traveling
people, to
help
them
movein the
rightdirection.
This
willhelp
them
gofaster
and with safety.The
design
considerations willbe based
onthe
needs andthe
nature ofthe
user.This
design
will meet stated objectives, some of which are to givethe
location,
map
information,
and traveldirection information.
To
organizethe
thesis,
the
workwillbe divided into
three
parts:the
problems andthe
supporting
reasonsthat
callfor
change,the
research andthe
analysisfor
designing
userinteraction into
the
product, "Port
-A
-Map,"and
the design
process.Before
a changeoccurs,
its
nature mustbe
well understood sothat design
resources canbe
shapedto
respond"!.
It is
aninteresting
questionfor the designer
nowadays:how
to design
while advanced
technology
offers almost unlimited possibilitiesfor
the function
andquality
of a product.At
the
sametime,
the
use ofintelligent
electronicshas increased rapidly in
the design
of numerous small appliancesbecause
of stimulationby
costreductions,
resulting
from
technologicaladvances.
However,
most ofthe
products offeronly
sheer power.They
lack the
ability
to
communicate withthe
users.Research
anddesign
of userinteraction
shouldbe done. The
product,
"
Port
-A
-Map,"will
be
analyzed anddeveloped along
this
concept.The
art offinding
the
way
by
graphicmap developed
avery
long
time
ago.Due
to the
along
land,
such as roads.The device's features
the
evaluation ofthe
needs,
the
human factors
andthe
scenarios of user, andthe
technology
available.
It has
to
be
emphasizedthat the
design
ofthe
Intelligent
Mapping
wasdone
as aconceptual exercise.
The
research andthe
design
for the
product proceededalong
the design
development
process ofthe industrial designer. For
the
designing
userinteraction,
almost allconcerns are about
the
environmental andhuman factors
considerations ofthe
user populationincluding
novice andnon-technically
trained
people.2The device is
possibleto
be
operated withtechnology
expected withinthe
very
nearfuture.
Reports
onthe
electronic navigator marketindicate
rapid growth of advancedtechnology
in this
area.1 For
adetailed
discussion
ofthis
matter see pp.3-5
.2Ben Shneiderman,
"The Future
ofInteractive
Systems
andthe
Emergence
ofDirect
PROBLEM
DEFINITION
The
process ofdirecting
the
movement acrossland from
one pointto
anotheremergedlong
ago.A
number of methodshave been
used.Nowadays,
peoplehave
asufficiently
well marked systemfor
travel,
i.e.
streets orhighways.
However, they
stillhave
problemsgetting
to
theirdestinations.
Losing
the
way
meanswasting
time,
money
andpleasure,
orit
mightbe
hazardous.
Before
the
analysis
occurs, the
problem criteria shouldbe
established.There
aretwo
basic
concernsthat
were observed:1
.The User
2.
The Product
1.THE USER
1.1
Humans
areborn
without orientationability,
sothey
need adirection
finding
tool.The
phrase,"
a person's
orientation,
"is
sometimes usedto
referto
one'sability
to
behave according
to
actualorientation,
and sometimes usedto
describe
the
actual movements madein setting
the
body
to
a particulardirection. Several
studieshave
shownthat
man wasn'tborn
with a sense ofdirection,
oneis
the
study
by
De
Silva
(
1931
)1on
the
boy
withthe
magnificent sense ofdirection.
The boy's
abilities camefrom his
mother whohad been in
the
habit
ofusing
geographicaldirection
when sheindicated direction
athome. To be
a well orientedperson,
one needsto incorporate vision,
man's mostimportant modality for
orientation.1
Howard
Templeton,
Human
Spatial
Orientation.
(
London,
New
York,
Sydney
:John
So it
that
the
secondbarrier for
manin perceiving
quickly
accuracy is his
owninformation processing
mechanism.Specifically,
ergonomics usedetailed,
quantitativeknowledge
aboutthe human
body
to
design
tools
and equipmentwhich maximizeproductivity
andsafety
whileminimizing
work andenvironmental stress
for
the
maximum range of users.Ergonomics
allowdesigners
to
capitalize onhuman
capabilitieswhileavoiding human limitations.
In
the
presentday,
an ergonomics model ofTask/
Operator/
Machine/
Environment
bases
on a systems approachto
modeling
ofhuman
performance1.The
attentionis focused
onthe
operator's
behavior. This
aspect alsobrings
the
information processing
to
animportant
ergonomicconcern,
because it influences
human
behavior2.
However,
these
severaldifferent
processes arelimited
by
man'sprocessing
mechanism.Attention
The ability
to
selectedtask
information
whileignoring
otherinformation.
We
can't processall
the information that
is
availableto
us atany
onetime.
The
problemis
that
peopleoccasionally
are misledinto
notattending quickly
enoughto the
important
information,
a
frequent
cause oftask
errors and accidents.For
example,checking map
and road signs whiledriving
fast.
Perception
-The process thatinterprets,
classifies and organizesarriving
information. If
one'sperception of
the
expected outcomeis
at variance withthe
actual outcomethen a problem exists.For
example,
observing
the
viewin
three-dimensions,
then
looking
for
the location
on atwo-dimensional map.Memory
-is
ourinformation
storage system.
A
problem often occursbecause
ofdesign
inconsistency
between
similartools that
we use orbecause
the
mentalload
we are confronted withis
too
demanding,
like
the
situation when weforgot
the
direction,
eventhough
wedid study
the
map before
the trip.
Decision
making
-The
process
by
which we choose our course of action.People only have
alimited
capacity
to
makerapiddecisions. If
too
many decisions
are requiredtoo quickly,
awhile,
the
time,
paying
to
many fast moving
1.3
Nowadays
people arebusier,
andthey
have
more activitiesthat
needto
be done
withinless
time than
before.
Also,
high
technology
transportationis
availablefor
themto
movefaster.
These
changes mandatedevelopment
of a navigationtoolto
keep
up
withthe
situation.The United States benefits
from the
existence of ahighly
developed
and extensivetransportation
network.In
mostinstances,
peoplehave
a choice of severaldifferent
modes(
orforms
)
oftransportation to
service their needs.The
businessman
contemplating
atrip
from
New
York to
Boston may
choosebetween
airline, railroad,
bus,
or private automobile as a means ofintercity
travel.1These
advanced systems offerthe traveller
a chanceto
choose or combinein
orderto
createtheireasiesttrip.However
the
problem oflosing
the
way
still exists.Our
direction
finding
tools
are not yet sofast & flexible
as ourtransportation
system.The
highway
withplenty
of signsdoesn't
mean no one getslost any
more.Traditional tools
such as maps and compasses cannot work athigh
speed.Speedy
tools
like
airplane navigation orship
navigation aretools
specially
madefor
each mode.They
don't have
the
flexible
usagefeatures
ofthe
compass and map.2.
THE PRODUCT
2.1
Present
direction
finding
devices
resemble earlier performancetools. Later
development hasn't
improved anything
to the
point wherethe
userinteracts
withthe tool
yet.Formerly,
land
navigation, for the
trip
across unmarkedareas,
combinedthe
same elementsas navigation used atsea.Piloting,
dead
reckoning,
and celestial navigation were usedfor
travel
acrossdesert,
tundra
orice. At least
the
northdirection is
neededto
find
the
way
onthe
map.However,
manhas
a separatemodality for
geographicdirection,
which gives adirect
awareness ofthe
earth's magnetism.(
Viguier,
1882
)
2
top
farther away
direction
a personfacing
Notwithstanding
fact
that
for many
centuriesit
wasthe
standard practiceto
assign orientation on somelogical
basis,
even
if it
wasonly
religious or nationalinterest,
north orientationbecame fixed in
cartographicmethodology.
2
From
the
point of view ofeducation,
north orientationhas little
justification.
It has
been
defended
onthe
groundsthat
it is fundamental
to the
teaching
of shapes and areas.3North
orientation
has
evenless justification in function
since an experiencedmap
userautomatically turns
the
map
sothat
"top
"is in
the direction
he is facing.
2.2
As
the
device
existedfor centuries, the later
navigation cameup
withthe
sameform
asthe
earlier one.
They
still askthe
userto
adaptto them
ratherthan
asking
the
machineintelligence
to
adapt
to the
needs of anindividual
user.Instead,
design
deficiencies
are still overcomeby
training
andinstruction
manuals.4Land
navigationis
the
process ofdirecting
movementacrossland
orice from
onepointto
another.It
wasbelieved
that
when travelis along
a well-marked system ofhighways,
trails,
railways,etc.,
a goodmap
anddistance-measuring
device
are allthat
are needed.5The
equipment used andthe
procedurefollowed
shouldbe
suitedto the
circumstances.It is amazing
that
humans
canevolve
in terms
of our system andtools
much morequickly
than
in
terms
of ourphysicalbeing.
6
So
ahigh
degree
ofcommon sense andadaptability
are needed.It
wouldbe
a waste of effortto
1 Arther H.
Robinson,
The
Look
ofMaps
(
Medison
:The
University
ofWisconsin
Press,
1952
),
p.622|bid.
3|bid.
4Rheinfrank,
"Designing
User
Interaction
Product ",
p.285Nathaniel Bowditch,
American
Practical
Navigation.
(Washington
:US
Navy
Hydrographic
Office, 1966),
p.6646john
C.
Thomas,
"Organizing
for Human Factor
"measure
accurately
every
change of courseif
one werefollowing
a stream whosegeneraldirection
is known. But
across an area withoutfeatures,
each change of course mightbe
of great importance.1Today's
navigationdiffers
fundamentally
from that
ofjust
adecade
ago.When
the
valueof
time
increases,
it becomes
worththe
effortto
measure with speed andaccuracy
.The
application ofhigh
technology
to
direction
finding
has become
reasonable and economical.In summary,
these
observations on navigation andits
user revealtwo
problems :the
problem of
human limitations
andthe
problem of navigationinteraction
irrelevant
to
the
user.In
orderto
solvethese two problems, I
have carefully
planedmy
researchin
these two
areas:1.
Navigation
Technology
Since
advancedtechnology
demonstrates
its
power through most of presentnavigational
techniques,
the technique
offormer
systems willbe
studiedalong
withthe
latest
system, the
computerized navigation.This study
willhelp
the
designer
to
understandthe
capability
of modern systems.They
can then create atool whichhas broad
capabilities,
atoot
which couldpossibly be
usedin the
nearfuture.
2.
Human Factors
Ergonomics
andthe human
-computer
interaction
arethe
focus
studies.Because
the
product conceptwillbe
drawn
mainly
from both subjects, the
userabilitieswillbe
the
strong base
for
constructing
the
model ofthis
userfriendly
product.Moreover,
this
model willbe
addressed asthe
solutionfor the final
design.
CHAPTER
PRINCIPLES OF NAVIGATION
By
examining
the
principles of current navigationdevices
andthe
variety
of advancedtechnology
appliedto
them,
a conceptual systemfor this design
canbe
constructedThe
process ofnavigating
aship from here
to there
acrossthe
land
orthe
sea caninvolve
four methods,
any
combination or all of whichmay be
usedin
a port-to
- port passage.1.
PILOTING
In
piloting
for
marinenavigation, the
navigatorfigures
out wherehe
is simply
by looking
at variousvisible
landmarks
andlistening
for helpful
sounds such as abell
buoy
orfoghorn,
andhe
steershis
course accordingly.
He may
use objects onthe
shore orhe may
useany
ofthe
numerousbuoys
and other navigation aids
that
arefound in
coastalwaters.1In
land
navigation,
piloting is generally
quitesimple,
consisting merely
ofthe
recognitionof
landmarks,
and notation ofthe time
anddistance
at whichthey
are passed.It is
similarto the
passage ofbuoys
as one proceedsalong
a channel.Nowadays,
because
wetravel
along
the
modern
traffic system, there
is
no needto take
bearings
withdistant
mountains whentraveling
in the
open
country
any
more.2. DEAD
RECKONING
:A
termwhichderives from
a contraction ofthe
word "deduce"="ded
".
A
courseis laid
outon a1 Edward V.
Lewis,
Robert
O'Brien,
andthe
editor ofLife,
Ship
(Time Life). (New York
position,
reckoning
determining
the
On
land,
dead
reckoning
is
alsothe
way
to
determine
atraveler's
position as well.The
method,
processed onto achart,
enablesthe traveler to
pinpoint and correct an error.The
chartused on
land,
whichis today's
roadmap,
shows greatdetail. Both
the
selecting
andfollowing
of a route arerelatively
simple.There
are sufficient names and numbers ofidentifiable landmarks.
Because
the
chartis already
plotted as a well markedroute, the
map is
notthe
chart usedfor
plotting
the
route asbefore.
In
orderto trace the
routeto
any
destination
orto checkthe
routefor
the
change of course or speederror, the
actuallocation is
needed.This
is
determined
by
calculating direction
anddistance.
3.
FIXING
AN
ERROR
At
sea, the
method offixing
an erroris
by
using
equipmentto take
abearing. When the
ship is in
sight of
land,
the
first step
in
getting
afix
is
finding
alandmark
andidentifying
it
onthe
chart.Most
fixes
are obtainedwith a compassbearing
ontwo
landmarks,
but
if
more thantwo
arein
sight,
they
can
be
usedfor
additional accuracy.A
celestial compassis
anotherkind
of navigationinstrument
which provides
this type
of a check whenthe
ship is
far
from land
and out of sight ofany helpful
landmarks. With
this
device,
one's positionis determined
by
referenceto the
position ofthe sun,
moon or stars.
For land
navigation, the
method offixing
an error andtracing
the
routeto the
destination
areby
checking
direction
anddistance,
asfollows
:3.1 Direction
As
the
trip
is along
a route which appears onthe
map,
somekind
of equipmentis
needed
for
telling
whichdirection
onthe
map is
correct with regardto the
front
viewbeing
faced.
The
following
tools
had been in
use whentrips
wereprimarily
made overflat,
opencountry
orin
rugged or wooded
country; still, their
mainconceptsare usedto
this
presentday
:a
)
The Magnetic
Compass
:This
compasstends
to
alignitself
withthe
magneticlines
of1Lewis,
Ship
(
Time Life),
p.151
the
force
ofthe
earth.Because
ofits
essentialsimplicity independent
ofany
powersupply
or otherservice,
a magneticcompassdoes
noteasily become
totally inoperative,
eventhrougha ship'srigorous
journey. The
problemis,
sinceit
respondsto
any
magneticfield,
the
original magneticcompass
is
affectedby
any
changein
the
local
magneticsituation,
such as occurs whenit is
affixedonto a
tanks.
b)
The
Gyro Compass
:This
compass seeksthe true
(
geographic)
meridianby
the
behavior
exhibitedin any rotating
mass.The resulting
precession causesthe
spin axisto trace
aspiral
path,
eventually
settling
nearthe
meridian.Since
a gyro compassis
not affectedby
a magneticfield,
it has been
used alot
in the
areas of extensivedeposits
of magnetic material andespecially
in
the
vehicles where magnetic compassinstallations
aredifficult.
With
regardto
its
undesirablecharacteristics, the
gyro compassis dependent
upon a source of suitable electric power.Also,
any
disturbance
during
the
operation ofthe
compass can cause unreliable results.For
today's use,
both
ofthese
compasses notonly
provide adirectional
reference andcan
be
used asnorth-seeking
compasses,
but
they
have
alsobeen improved
to the
extentthat
they
can operate as automatic systems.
With
this
increased
capability,
they
can providedirection
evenduring
a major change ofcourseor speed.c) The Sun Compass
:This
compassis
a mechanicaldevice for
determining
true
directions
by
means of celestialbodies,
principally
the
sun.It is free from
magneticdisturbance
andgyro error.
However,
there
arelimitations
of observer position andtime,
for
it
mustbe
used whenthe
sun
is
visible.Generally
this
device is
not used as a continuousindication
ofdirection,
but
as ameans of
checking direction
atintervals.
3.2
Distance
In land
navigation,
distance is usually determined
directly
ratherthan
by
means of speedand
time.
Speed may be
usedif
constantenough,
but
this
is rarely
the
case.For
a vehicle withwheels, the
obvious methodis
by
odometer,
the
distance-measuring
device
associated with a speedometer.For
accurateresults,
such adevice
shouldbe carefully
calibrated.
Size
oftires,
amount oftread
left
ontire,
pressure,
loading,
speed ofthe
vehicle,
andnature of
the
surface over whichthe
vehicletravels
all affectthe
reading.When
traveling
onfoot,
one can use apedometer,
asmall,
watch-sizedinstrument,
4.
ELECTRONIC NAVIGATION
Electronic
navigationis plotting
a position withthe
help
of signalsfrom
a radiotransmitter,
radarequipment and other electronic
devices.
Advanced
technology
currently
creates a number of sophisticated navigationinstruments
and navigation techniquesfor both
land
and sea.The
CHAPTER IV
STATE OF THE
ART
Navigation
Technology
It
was saidthat
navigationhas
changedfrom
an artto
a science sincethe
advent oftwentieth
century
electronics.However,
both
the
most advanced aids as well asthe
simplestdevices
stillrely
onthe
same principle:that
is,
if
a ship's speed and changesin
course canbe
measured
accurately,
thenits
precise progress(
andtherefore
its
position)
canbe
calculated.Advanced
technology,
by
the
means of present-day
instruments,
provides precise measurementsfor
both land
and sea navigation.1.
MARINE NAVIGATION
Modern
shipshave
sophisticated electronic gearthat
providenavigating information
of remarkableaccuracy,
for
example :1.1
An
Electronic Echo
A
sounder whichbounces
sound waves offthe
oceanfloor,
times the
return ofthe
echo
and,
from
this
information,
revealsthe
contour ofthe
bottom
andthe
depth
ofthe
water.1.2
A Radarscope
In
the
blackest
night,
a radarscope onthe
bridge
yieldsthe
range andbearing
ofany
sizable object
up
to
40
or50
miles away.1
.3RDF
(
Radio
Direction
Finder
)
This device
givesaship
its
bearing
when sheis
within rangeof atransmitter.
A
sensitiveoperating
on aknown
frequency,
andfrom
that
signalthe
captainlearns
his
course orline
ofposition.
1
.4LORAN
(Long
-Range
Navigation)
With
LORAN,
effectivefor
some700
to
1,400
milesoffshore, the
ship
receivessynchronized,
intersecting
radio signalswhich give a position accurate within atenthofa mile.1
.5Navigational
Satellite
andComputerized
Navigation System
In
additionto the
constantimprovements
in these systems,
even more spectacularnavigation aids are
being
introduced. In
onesystem,
specially
programmed shipboard computersprocess
data from
the
Navy's
three
navigational satellitesand, in
less
than onesecond,
givethe
vessel's position with great accuracy.
The
systemis
worldwide and operatesin
all weather.Also
under
development is bathymetric navigating
equipment which enables a captainto
locate
his
position
by
echo soundings over apreviously
surveyed andelectronically
mapped area of oceanfloor.
Scientists foresee
the
creation ofstrip
maps ofthousands
of miles of oceanfloor
underthe
major sea-lanes
to
givethe
navigatoridentifiable landfalls beneath
the
water.1Although
not all shipscarry
computers which calculatetheir
positionby
using
signalsreceived
from
satellites,
most of themhave
other advanced electronic sets whichhave
similarcapability.
If
we wereto look
inside
most modernships atthe
crews'activities,
we would seethat the
captain of
the
modernliner
setshis
course andleaves it
to the
automatic pilotto
steerthe
ship.The
slightest change
in
courseis
noticedby
the
gyro compass and passed onto the
automaticpilot,
which alters
the
setting
ofthe
rudder.In
the meanwhile,
an electroniclog
keeps
acontinuing
recordof speed and
direction;
ultrasonicdepth-sounding (
sonar)
equipment measures and recordsthe
depth
ofthe
seabed;
automaticdirection-finding
equipment receives signalsfrom
a shoretransmitter and plots
the
ship'scourse ; radar screens pick outany
other shipsin
the
vicinity
; andofficers
in
the
radio room arein
constant contact withthe
shore and with other ships.There
areregularweather, wave and
ice
reports.It
is
commonto
follow
a routebased
onthe
mostfavorable
wind and wave conditions, atherthan on
the
shortestdistance
2
1
Lewis,
Ship
(Time
Life),
p.1
57
-8
2.
LAND NAVIGATION
Since
land
navigationhas
the
samebasis
as marine navigation ,the
same principleshold
true
for
land
vehicle.How
they
differ lies in
the
methods ordevices
usedfor measuring
the
changesin
course and
in the
place of usage(
seato
land ). In
orderto
showthe
applications of advancedtechnology
for direction
-finding
onland,
I
willdescribe
some currentland
navigationinstruments.
2.1
Electronic Land Navigation
The
most common electronic aid usedis
someform
of radiodirection finder
(
the
directional
characteristics ofthe
loop
antenna of a portable radiomay be
utilized)
usually
usedin
connection with a
transmitter
atthe
destination.
In this system, the
direction
finder
is
used as ahoming
device. If
signalsfrom
other radiotransmitters
atknown locations
canbe
received,
a positioncan
basically
be determined
by
plotting
two
or more bearings.1However,
many
things
caninterfere
withthe
transmission
of radio waves onland,
whetherit be
natural obstacleslike
cliffs,
man-made obstacleslike high
buildings,
or acity
atmospherefilled
withenormous wavelengths.Like
marinenavigation, the
four
principle methods ofland
navigation(
chapterill
)
areenhanced
by
advancedtechnology.
Several
types
of mechanicaldead reckoning
equipmenthave
been devised.
One
ofthem,
" a vehicledirection
and position indicator,"2is designed
for
vehicleinstallation
andoperatesfrom
the
vehicle electrical system.With inputs from
agyro compass andthe
odometer
drive,
it
automatically
computes andcontinuously displays
the
vehicle positionin
map
coordinates.It
also computes anddisplays
the
distance
anddirection to
a pre-selecteddestination.
It is designed
to
be
used with amap
plotter which can plotthe
coursefollowed.
2.2
Computerized Navigation
System
A
computerized navigation systemfor
automotivetravel,
called "Etak,"
has recently
been
developed.
This
self-contained navigation system offers simplebut
valuable aidsto
drivers,
such as
showing
their
destination draw
nearer asthey
proceed,
making wrong
turns
immediately
evident,
andtaking
street names out ofthe
nighttime
darkness.
Because
this
is
avery
interesting
new approachto
automotive navigation withmap
display,
it
willbe described in detail.
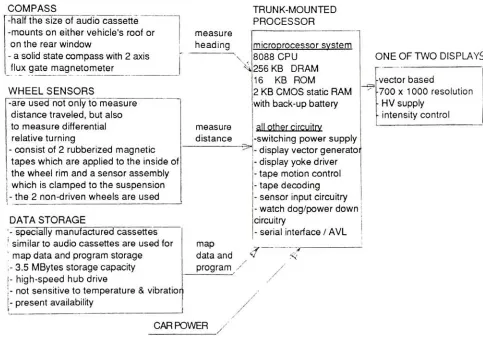
a
)
The Hardware
:This
navigation systemis
packagedin
three
majorparts : aprocessor,acassette
tape
drive
and adisplay,
similarto the
major parts of a computer.The
othertwo
parts are asolid statecompass and
two
wheel sensors.(
seefigure
4.1
)
figure
4.1 1COMPASS
measureheading
\
measuredistance
TRUNK-MOUNTED
-halfthesize of audio cassette
-mountson either vehicle's roofor
ontherear window
-a solid st-ate comp-ass with2axis
flux
gate magnetometerPROCESSOR
microprocessorsvstem
8088 CPU
256KB
DRAM
16
KB
ROM2
KB CMOS
staticRAMwith
back-up battery
all other circuitrv
ONE OF TWO
DISPLAYS
-vectorbased
700x1000 resolution
HV
supplyintensity
controlWHEEL SENSORS
-areused not
only
tomeasuredistance
traveled,
but
alsotomeasure
differential
relative
turning
-consist of2rubberized magnetic
tapeswhich are appliedto the
inside
ofthewheel rim and a sensor
assembly
|
whichis
clampedtothesuspensionj-
the 2non-drivenwheels are used-switching powersupply
-display
vector generatoi -displayyokedriver
- tapemotioncontrol - tape
decoding
- sensorinput
circuitry
map
dataand *
program
/
DATA STORAGE
- watchdog/power
down
j
circuitry
-specially
manufactured cassettes 'similarto audio cassettesareusedfor
- serial
interface
/AVL!
map dataandprogramstorage ;-3.5
MBytes
storagecapacity
1
4
/
\- high-speed hub drive}- notsensitivetotemperature&vibratior
- present
availability
DWER
/
/
CARP
b)
The Software
:The
programs runby
the
navigator areloaded from
the
map
cassette.The
systemROM
is
usedto
boot
the
mainprogram,
for
navigation whilebooting,
andfor diagnostics
This
approach providesflexibility
to
accommodatefuture
cassettes with enhanced navigationspecial
databases
and application.1ETAK Inc.,
"The ETAK
Navigation,
the
World's First Automotive Navigation
System
" [image:19.613.68.551.248.585.2]c) The Navigation
:Dead reckoning
:The advancing
of aknown
positionfrom
measured courses anddistances,
whichis
the
sametechnique
asalready
explained.This
car navigator useddead
reckoning,
with wheel sensorto
measuredistance,
anddifferential
wheel sensors and compassto
measure
heading.
-Augmented dead reckoning
:The
proper update which cancelsthe
erroraccumulatedin dead reckoning
by
comparing
the
actual vehicle'strack to the
digital
map.For
example,
if
the
vehicle
drives in
anS
curve,
andthe
map has
anearby
road with acorresponding S
curve,
cross-correlation
between
the
vehicle'sdead
reckoned(
DR
)
track andthe
S
curved road onthe
map
can yield an accurate positional update.Besides
these
aspects ofthe
navigation algorithms usedin the
navigator, otherparameters
for making decisions
in
updating
the
road network are stored onthe
map.These
parameters
include
the
connectivity
ofthe
roadnetwork,
analysis of ambiguous updateoptions, andestimates of
the
accuracy
ofthe
currentDR
position.Dead reckoning
withmap
augmentationthus
shows error statistics which are similar
to
radionavigation,
independent
ofdistance
travelled.
-
Self-calibration :
The
navigator uses comparisonsbetween
the
map
andthe
vehicle'sdead
reckonedtrack to
continually improve
the
calibration ofboth
the
wheel andcompass sensors.d
) Display
:The
display
is designed
to
display
only
the
selectiveinformation
neededby
the driver
and presents
it
in
readableform
at a glance.
-Limited complexity
:Map
scale canbe
changedby
driver.
:
The map data base
selectsthe
roadto
be displayed in priority
by
keeping
the
display
complexity limited.
Selective labels
:Only
important
streets,
like
streets near a selecteddestination
orcross streets
ahead,
arelabeled.
:
Labels
are alwaysdisplayed
right sideup
and are consistentin
their
size.Heading
up
Presentation
:The
display
correspondsto the
driver's
orientationby
aligning
with whatis
seen outsidethe window,
sothe driver
canquickly grasp information
soughtfrom
the
map display.
e
)
Data Base
:This
allowsthe
navigation algorithmto
usethe database for
map
matching.This
willhelp
find destination
andformatting
displays
as afunction
ofdisplay
scale, orientation, and roaddensity.
f
) Mapping
:A
digital map data base is developed for
usein the
real-time vehicle navigation.The
map
area covers onefourth
ofthe
roadsin
a metropolitan area.Applications
are suggested such asrouting,
matching
addressfield to
coordinates,CHAPTER
V
HUMAN
FACTORS
Man
-Machine Interaction
The Human Computer Interface
MAN
-MACHINE
INTERACTION
In
designing
a systememploying
people andmachines,
weonly have
two
choicesfor
improving
the
human/
machinefit
: changethe human
or changethe
machine.Changing
the human
involves
selection and
training,
but
this
is
not always possible.Changing
the machine,
by
designing
it
"right
the
first
time,"is
abetter long-term solution,
but
selection andtraining
may
stillbe
needed.Fortunately,
the
basis
ofselection,
training,
and ergonomicdesign
areidentified
in
adetailed
analysis of
the
human-machine
interaction
called aTask Analysis.
The
concept ofthe
'task
* aids usby
opening up
the
methods usedby
human factors
engineers
in studying
the
complexinteraction between the
operator of amachine, the
machineThe Task/
Operator/
Machine/
Environment
System:1^jdecision
making
a*
physiology
i
muscular
|-skeletal system
i
i i controls
ENVIRONMENT
perceptual
^organization
Of&Wfc
INTERFACE
,Vt4CH1M*rawniiaterial
machine
attention finish
ENVIRONMENT
\ senses r^displays
<3
material
In
this
currentmodel, there
arefour
major subsystems ;a
)
Task
b
)
Operator
c) Machine
d
)
Environment
When viewing
human
performancein the
context of systemsengineering,
it becomes
apparent
that the
overall goal shouldbe
the
optimization ofthe
system rather thanany
particularsubsystem.
Equally
important in
this
contextis
a philosophical approach whichis
predicated uponthe
premisethat
most systemfailures do
nottake
placebecause
ofhuman
error orshortcomings,
but
ratherbecause
of mismatchesbetween human
capabilities and systemdemands.
In
orderto
ensure
the
success ofthe
system,Task Analysis
mentionsthe
human factor
asthe
necessary
concern.
The
classicmethod,
Task Analysis
(
Meister,
1974
)
starts with astep-by-step
description
ofthe
task,
that
is,
how the
operatorinteracts
withthe
rest ofthe
system.Each step
ofthe task
generatesTask
Demands,
or requirements,that the
operator must meetfor
successfultask
completion.
These Task Demands
are then compared withinformation from human factor data
based
on whathumans an do
onthis task.
Finally,
the
data bases
mustdescribe human
capabilitiesand
limitations in
the
sameterms
asthe
Task Demands.
Goals
ofTask Analysis
are:1
.Determine demand VS capability
2.
Determine
limiting
subsystems3. Alter Task/ Operator/ Machine/ Environment
to
removeor reducelimitation.
In
orderto
reachthese
goals,
human factors
arethe
mostimportant.
This is why
the
human factor
makesthe
system succeed.A
human factors
analyst needsto
decide
which aspectsof
task
performance arelimiting
sothat
efforts canbe
concentrated onthese
aspects.A human
factors
understanding
canhelp
adjust adirection-finding
tool ortrip
environment,
andthis
understanding
canbe helpful in
designing
appropriatedisplays
and controlsthat
will enhancecommunicationwith
the
userandhelp
him have
a successfultrip.
In
man-machineinteractions (see
modelp.19), the
operatorusually
receivesinformation
about
the
progressof productionfrom
adisplay (
adisplay
refersto
generally any
man-made methodof
presenting
information ). The
operatordetects,
receives andinterprets
this information
and onthe
basis
ofhis/ her
interpretation,
makes adecision
and communicatesthis decision to the
machineby
using
the
controls.The
controldisplay
then tells the
operatorthe
consequences ofhis
actionand
the
machine carries outthe
production process as programmedby
the
operator.Therefore,
"human
factors"are criticalto
any
man-machine system.Finally,
in
designing Port-A-Map
sothat
it
canbe
operatedaccurately
andeasily
andadapted
to the
trip
environment(trip
with car ortrip
withoutcar)
to
meettravelerneeds,
we mustbe
aware of
the human
factors
:the
knowledge
ofthe
limits
and capabilities of oursensory
processes.These
canbe
obtainedby defining
:a
)
How
people receiveinformation from
theirsurroundings.RECEIVING INFORMATION
The
following
contentwillbe
about
-How
people receivesensory
information.
What
sensory
capabilities areimportant for human
performance.The way
we receiveinformation is
through
our senses.The
senses serve as ourchannels
for
knowing
aboutthe world,
the
people, objects,
and eventsin
the
external environment.A
minimallist
of man's sensesincludes
: vision,hearing,
the
proprioceptive senses(
sensing
body
position,
body
movement andforces
exerted),
the
chemical senses(
taste,
smell),
andthe
skinsenses
(
temperature,
pain,
touch,
pressure,
vibration).
The interpretation
ofsensory input is generally
afunction
of perceptual(
e.g. patternrecognition
)
and cognitive processes(
e.g.learning,
memory
).
This
interpretation
in
turn
leads
to
some sort of response.
The flow
ofinformation is
representedin
this
figure
:original source: objects events energy
light
sound mechanicalenergy
etc.information
eyes ears nerve-endings, etc. information pattern recognition memoryinformation
, , physicalbehavioral
response people inthe nhv^ipslinput processings decision
making output environment
Example:
wavelength oflight changein illumination eyes organize trafficlight turns red iriiurmauunJ
memory
decision
.stop the car jmaking
In
designing
andevaluating
the
workenvironment,
important
questions center uponwhether
the
incoming
energy
(
stimulus)
is
likely
to
be
sensed anddetected
by
an operator.The
probability
ofdetection
is
afunction
ofboth
the
input
energy,
background
noise andthe
capabilitiesof
the
receiver.First
:The
intensity
atwhich a soundis detected depends
uponthe
pitch ofthe
soundandwhether
it is steady
or modulated.Similarly,
the
detection
ofawarning
light is
notjust
afunction
Second
:There is
the
effectofthe
environmentin
whichthe
stimulusis
embedded.A
sound
is
moredifficult
to
detect in
anoisy
background
; awarning light is
moredifficult
to
detect
onthe
mainstreetofLas
Vegas
at night.Third
:There is
the
effect ofthe
human. His
sensesmay be
affectedby
chronicdefects
(color
blindness,
low
visualacuity
)
orby
acutedefects
(
notdark
adapted,
headache,
illness
).
In
orderto
find
the
answerfor
designing
Port-A-Map
andevaluating its working
environment, I
willdiscuss
the two
majorreceiving
senses :The
Visual
Sense
andthe
Auditory
Sense.
1.
THE VISUAL SENSE
In
mosttasks
weperform,
we receivethe
majority
ofinformation
we needfor
taskperformancefrom
our visual
system,
i.e.
writteninstructions,
switchcontrols,
warning lights.
Essential
to
a visualinformation
system(
flow
ofinformation
from the
environmentto the
eyes
to the
brain
)
is
the
ability
ofthe
operatorto
detect
andidentify
any
object, pattern ormarking
that
he/she
must seein
orderto
perform successfully.It is important
to
realizethat the
visual systemincludes
more thanthe
eye.a)
Physiologically
it includes
the
eye andthe
brain.
b)
Psychologically
it involves both
the
immediate
visual sensation and past experience.In
otherwords, the
visualinformation
we receiveis
notonly
afunction
of physicalenergy,
but
also ourinterpretation
ofit
whichdepends
on perception and past experience.We
receivevisualinformation in
one oftwo
ways :Directly
,i.e. direct
observation of an airplane.Indirectly
,through
someintervening
mechanism ordevice
such asT.V.,
Radar.
However,
a person often needs moreinformation
thanhis
unaided senses candetect
;in
these
circumstances successfulhuman
performancedepends
onthe indirect
presentation ofinformation
throughthe
use of sometype
ofvisualdisplay.
Ergonomic
principles are criticalin
the design
of visualdisplays. The
efficiency
in
providing
information
is important. It is necessary
that the
information
presentedis
correctly
recognized and understoodby
the
receiver.For
example,
CRT
screenshave little utility if the
something, it is important
that
its
meaning
is
understood,
such as a redlight serving
as awarning
signal.
There
are a number offactors
to
be
consideredin
designing
agood visualdisplay:
-sizeof
the
scalegradations.
-size and shape of
the
letters
andfigures.
-
degree
ofluminance contrast, viewing
distance,
viewing
time.
- color vision
-illumination
, glareIn
orderto
design displays
which are effective andto
be
ableto
evaluate anenvironment or
task
in
terms
ofthe
visualdemands
placed on anoperator,it is necessary
to
have
anunderstanding
ofthe
capabilitiesandlimitations
ofthe human
visual system :1
.1
Visibility
:Detection
ofLight
Visibility
is
the
ability
to
detect
light. We
cannot seeany
objectin
acompletely dark
room.
The basic
principle ofvisibility is
animportant
consideration whenexamining
the
role ofthe
human
operatorin
a visualtask.
In insufficient
light,
an operatormay
not receive needed taskinformation,
or sometimes awarning light
on aninstrument
panelis
notbright
enough and anoperator
may
notbe
ableto
detect it.
1.2
Visual
Capasity
The
variousfunctions
ofthe
eye are notusually
pushedto the
limits
oftheir
performance
in everyday life. But
this
may
sometimes occur under moderntraffic
orworking
conditions.
a) Acuteness
ofVision
:Acuteness
of visionis
the
ability
to
seethe
finest details
ofobjects and surfaces,
the
visual separation of pointslying
closeto
eachother,
andthe
appreciationof
form
and shape.Acuteness
of visionis
relatedto illumination
andto the
nature ofthe
objectsbeing
seen:Acuteness increases
withthe
level
ofillumination,
reaching
a maximum of5000
asb.(467.2
FL
Foot
Lamberts,
USA).
The increase is
150
% between
1
and5000
asb.-
Acuteness increases
withthe
contrastbetween the
test
symbol andits immediate
background.The
effectis
greatest atthe
low
end ofthe
contrast scale.-
Acuteness
is
greaterfor dark figures
on alight
background
than
for the
reverse.smallest
differences in
luminance,
andthus to
appreciate niceties ofshading,
small variationsin
tone,
andthe
smallest nuances ofbrightness,
all of whichmay be decisive in
deciding
about shapeand
form,
i.e. for
visionin depth.
Sensitivity
to
contrastmay
be
even moreimportant
than
acutenessof vision
in many jobs
entailing
inspection
andquality
control.Sensitivity
to
contrastis
subjectto the
following
rules
-It is
greater wherebig
areas areinvolved
than
for
small ones.It is
greater over shapedboundaries
than
whenthe
changeis
gradualorindefinite.
It increases
withthe
luminance
ofthe
surroundings andis
greatestwithinthe
range of200-10000
asb.-Itobeys
the
Weber-Fechner
law and,
withinthe
range above, a contrast equalto
about2
%
ofthe
surrounding luminance
canbe detected.
It is
greater whenthe
outer parts ofthe
visualfield
aredarker than the
center, andless
in
the
reverse contrast.Maximum
values are1200-1500
asb.in
the
centerand100-300
asb.in the
periphery.
c) Speed
ofPerception
:Speed
of perceptionis
the time interval that
elapsesbetween
the
appearance of anobjectin the
visualfield
andits
perceptionby
the
brain.
This
speedincreases
with
improved
lighting
andincreased
contrastbetween the
object andits
surroundings,
asdo
acuteness of vision and
sensitivity
to
contrast(
but
speed canbe increased only up
to the
maximumspeed of perception
).
Either the
speed of perceptionor,
conversely,the
minimumdisplay
time
requiredfor
the
objectto
be correctly
identified,
arecommonly
measuredby
the technique
of tachistoscopy.12. THE AUDITORY
SENSE
The
physiological process of sound perceptionis essentially
the
same asthat
of visual perception.It
serves as another
important
channel ofinformation between
man andthe
environment.In
this case,
the inner
ear providesthe
"interface
"at which sound-waves are converted
into
nervousimpulses
along
the
auditory
nerve.The
actual perception of soundis the integration
andinterpretation
ofthese
sensory impulses in
the brain or,
moreprecisely,
in
the
auditory
cortex.The two
principalfunctions
of audition are:a
)
To
convey
specificinformation:
as abasis
for
communicationbetween
individuals,
this
function is
highly
developed in
man.Speech
serves as animportant
means ofinformation
transfer.
b
)
As
an alarm system:by
activating secondary
pathwaysleading
to the
brain,
it
plays anessential part
in
waking
up,
in
increasing
alertnessand,
finally,
in activating
alarm.The
perception of sounddoes
not yield afaithful
reproduction ofthe
wholebond
offrequencies,
whichis
simply
"played "
in
the brain.
This fact is especially
important
with regardto
people's reaction
to noise,
which variesgreatly
from
personto
person.What
is
noiseto
onemay be
music
to another,
orthe
noisethat
generally
activates alarmdoesn't
workany
morefor
a person whoalways experiences a
false
alarmAnother
example ofvarying
perceptionis
the
assessment ofloudness in
relationto
pitch.In
practice,
low-pitched
sounds seemless
loud
than
shrillones,
eventhough the
energy
contentmay be
the
same.In using
the
auditory
sense systemto
transmit information
either throughthe
use ofauditory
display (
receiveinformation
indirectly
through
warning
and alarmsignals,
telephone,
etc.)
or speech
communication,
a number offactors
affect a person'sability
to
detect
anddiscriminate
sounds.
2.1
Individual Factors:
-Hearing
ability
ofindividuals.
Age.
-
Experience
of
individuals.
-
Length
of exposureto background
noise.2.2
Signal
Characteristics:
-
Sound
intensity
andfrequency.
Sound
duration.
Rate
of sound occurrence.Probability
of signaloccurring
2.3
Environmental Factors:
Type
and amount ofbackground
noise.
DETERMINING WHETHER
TO USE AN AUDITORY OR VISUAL
FORM
OF
PRESENTING INFORMATION
Hearing
is
secondonly
to
visionin
providing information
through
which we canknow,
learn
andadjust
to
our surroundings.Besides
the
obviousfact
that
hearing
involves
ears andseeing involves
eyes,
hearing
may be distinguished from
visionin
these
ways :1
.Audition is
characterizedby being
alinear
sequencein
time,
whereas visiontends to
be
more of a gestalttype
experience.2.
Consequently,
auditiontends
to
have
a slower rate ofinformation
transfer whenmeasured
in bit
per unit oftime.
3.
Audition is
more non-directionalthan vision,
i.e.
a soundmay
gainour attention evenif its
sourceis behind
us orobscuredby
another object.4.
Because
ofits
relative slowness andnon-directionality,
auditory
signalstend to
be
better for
qualitative ratherthan
quantitativemessagessuch as warnings.The decision
on whento
use anauditory
or visualform
of presentation ofinformation
depends
onthe
nature ofthe
message orsignal, the
conditions under whichit
mustbe
receivedand
the
characteristics ofthe
personsinvolved.
The
alarmfunction
ofthe
sense ofhearing
may
be
used
to
advantagein
planning
transport
andin
industry,
because it is
essentialto
recognizedangerous
situations quickly.The presenting
information function
is
often used whenthe
visualsystem of
the
personis
overburdened(such
as whenthe
operatorhas
to
monitor a complex visualdisplay
or when adriver has
to
drive
a car whilechecking
a navigationalscreen)
and some sort ofauditory
signal,
such as abuzzer,
is
usedto
alertthe
operatorto
any
type
of equipment malfunctionor
to
alert adriver to the
nextturn.
In
spite ofthe
fact
that the
visionsignalis
better for
imparting
quantitativeinformation,
in
the final
analysis, a suitable combination of acoustic signals and visual aidsis
needed.This
willresultin
a system wherethe
acoustic signals serveto
"alert"the
brain
andthe
visual aidsconvey
the
INFORMATION PROCESSING
Information
processing
is
animportant
ergonomic concernbecause
ofits
influence
onbehavior. For
instance,
the behavior
of people at workis
a consequence ofinformation
processing.From
the
model of
human
performance(p. 19
),
in
whichinformation processing
constitutesthe
major portion ofthe
model, the
consequence processis illustrated
:From
the
senses,
signals comewhich correspondto the
sense-organ's stimulation.These
signals are conductedalong
nervesto
the
brain
and acted uponby
complexprocessing
mechanisms.These
processing
mechanismsinterpret
and givemeaning
to
the
sensory
information.
There
arefour different
processesinvolved in
the flow
ofinformation
processing:the
attention, the
perception,
the
memory
andthe decision-making.
To
makeany improvement in information processing in
orderto
maximizeproductivity,
quality
andsafety,
the
discussion
throughout
ofattention,
perception,memory
anddecision-making
willbe
proceededfrom
the
following
precepts :1.
The human
operatorbehaves like
a single channelinformation
processing
device,
in
that
he/she
canonly
make activedecisions
about onething
at atime.
2.
The
human
operatorbehaves
asif he has
alimited
channelcapacity
and,
hence,
processesinformation
at a constantrate.13.
However,
the
operator can choose adifferent strategy
;he
candecide
notto
process allthe
information and,
thus,
accept ahigher
rate of errors.4.
The
speed/errortrade-offis
animportant
conceptin
ergonomics and showsthat,
unless we alterthe
situation,any increase in
speed willbe bought
atthe
expense of anincrease in
the
probability
of error.If
we wantto
both improve
speed and reduceerror,
we must either :1
Proceeding
from
assumptions1)
&
2)
the
information
content of adecision
canbe
measuredin
abit,
as expressedin the
following
equation:Amount
ofInformation,
BITS
=Log2 (
number of alternatives)
a) Cut down
the
number ofalternatives,
that
is simplify
the
job,
orb)
Increase
the
rate ofprocessing information
(
e.g.from
1
bit/second
to
2
bit/second
)
by
selection,
training,
orergonomic redesign ofthe
machine.Since my
main purposein
this
projectis
to
redesignthe direction
finding
toolergonomically, human factors
constitutea significant consideration.In
the
following
discussion,
I
willfocus
uponthe
capability
of eachinformation processing
channel relevantto the
design
analysis ofnavigating
tools.
1.
ATTENTION
Attention is
ourability
to
perform selective analysisofinputs.
The human
information
processing
system
is
viewed as a"single
channel."Because
ofthe
limited capacity
of ourinformation
processing
system,
wecannot process all ofthe
information
that
is
availableto
us atany
onetime.
In
order
for
usto
perform atask,
we needto
select outtask information
whileignoring
otherinformation. Attention is defined
as ourability
to
do
this.
Attention
consists oftwo
interesting
different
systems :a) Selective
Attention:
whereby inputs
arevoluntarily
attended to.It is
the
consciousdecision-making
procedurethat
initiates
anddirects voluntary
action,
such as a machine monitoroperating
a complex visualdisplay.
b)
Unconscious
Monitoring:
which refersto
our awareness of environment even whenwe are not
consciously attending
to
it.
The
problem ofattention,
hence,
is
to
maintainthe
balance between
these two
processes,
sothat,
for
instance,
a machine operatormonitoring
a complex visualdisplay
will notfail
to
noticea
flashing
warning
signalindicating
system.In
orderto
minimizethe
possibility
offailure:
1
.1Information
shouldarrivein
well proportioned andin
an organized order.Generally,
in
mosttask situations,