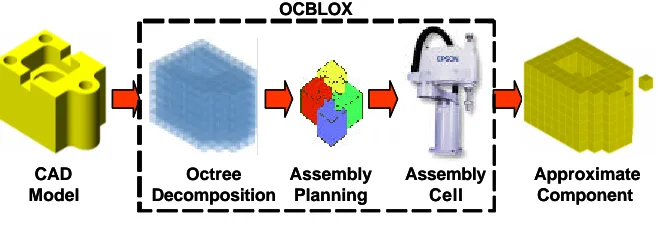
Automatic generation of robot and manual assembly plans using octrees
Full text
Figure


Related documents
In addition to the identification of ISR markers in pigeonpea, approximate mapping positions for a portion of these markers were predicted based on syntenic regions between
A schematic model was tentatively proposed as a basic assembly mode of cell wall polymers in the softwood tracheid as follows: a bundle of cellulose microfi brils (CMFs)
This is a repository copy of Integrated optimization of mixed-model assembly sequence planning and line balancing using Multi-objective Discrete Particle Swarm Optimization..
Though the thermodynamic decomposition voltage E value of the electrodes is the major component of the total cell voltage for the electrolysis, the overpotentials
We have shown that these techniques can be used to produce local assembly im- plementations that reduce operation count compared to both quadrature and tensor
The approach to improve the automatic proposal of assembly work plans with the help of a controlled natural language adjoins to three major research areas: Attempts to
flow arrangements. Figure 5.14 shows the CAD model of the TEG plate heat exchanger. The flow in hot water channel was introduced from the top and exits from the bottom of the
In this work, we proposed an efficient model for the robot navigation using neural networks and to overcome the path planning, kinematics based model is presented.. By
