IMPROVED TRACKING PERFORMANCES OF A HOT AIR BLOWER SYSTEM USING GENERALIZED MINIMUM VARIANCE (GMV) CONTROLLER WITH PARTICLE SWARM OPTIMIZATION (PSO) AND
HARMONY SEARCH ALGORITHM (HSA) TUNING METHOD
LIM HOOI CHEN
This Report Is Submitted In Partial Fulfillment Of Requirements For The Bachelor Degree of Electronic Engineering (Industrial Electronic)
Faculty of Electronic and Computer Engineering Universiti Teknikal Malaysia Melaka
ACKNOWLEDGEMENT
ABSTRACT
ABSTRAK
CONTENTS
CHAPTER CONTENTS PAGE
PROJECT’S TITLE i
DECLARATION iii
DEDICATION v
ACKNOWLEDGEMENT vi
ABSTRACT vii
ABSTRAK vii
CONTENTS ix
LIST OF TABLES xii
LIST OF FIGURES xiii
LIST OF ABBREVIATION xv
LIST OF APPENDICES xvi
I INTRODUCTION 1
1.1 OVERVIEW 1
1.2 PROBLEM STATEMENT 2
1.3 OBJECTIVES 2
1.4 SCOPE 2
1.5 METHODOLOGY’S SUMMARY 3
1.6 REPORT STRUCTURE 3
2.1 OVERVIEW OF PT326 5
2.2 RESEARCH ANALYSIS 9
2.3 AUTO REGRESSIVE WITH EXOGENOUS INPUT (ARX) MODEL
11
2.4 AKAIKE’S FINAL PREDICTION ERROR(FPE) 11
2.5 GMV CONTROLLER 12
2.5.1 Self-Tuning GMVC Algorithm 13
2.5.2 Recursive Least Squares (RLS) Estimation 13
III RESEARCH METHODOLOGY 15
3.1 RESEARCH METHODOLOGY 15
3.1.1 Project Planning 16
3.2 PARTICLE SWARM OPTIMIZATION (PSO) 19
3.3 HARMONY SEARCH ALGORITHM (HSA) 21
IV RESULT AND DISCUSSION 23
4.1 INTRODUCTION 23
4.2 MATHEMATICAL MODEL OF THE PT326 PROCESS TRAINER
24
4.2.1 Preparing Data for System Identification 24 4.2.2 Import Data Arrays into System Identification 24
4.2.3 Remove Mean 26
4.2.4 Estimation Data and Validation Data 27 4.2.5 Appropriate Order of ARX Model 29
4.2.6 Zeros and Poles 31
4.2.7 ARX 333 32
4.3 GMV CONTROLLER DESIGN 34
4.4.1 Number of Iteration (nt) Change In PSO Tuning Method
38
4.4.2 Number of Particle (NOP) Change In PSO Tuning Method
39
4.4.3 Number of Iteration (nt) Change In HSA Tuning Method
41
4.4.4 Number of Particle (Nhm) Change In HSA Tuning Method
42
4.5 SIMULATION RESULT 43
4.5.1 GMV 44
4.5.2 GMC with PSO 44
4.5.3 GMV with HSA 45
4.5.4 GMV with HSA (different stopping criteria) 46
4.6 COMPARISON AND JUSTIFICATION 46
4.7 DISCUSSIONS 49
V CONCLUSION AND RECOMMENDATION 50
5.1 CONCLUSION 50
5.2 RECOMMENDATION 51
REFERENCES 53
LIST OF TABLES
NO TITLE PAGE
2.1 Performances of the controllers designed by other researcher 8 2.2 The different technique of modelling and controller design for hot
air blower system
9
4.1 Comparison of different ARX model 30
4.2 The performances of the GMV controller with PSO when the number of iteration is different
38
4.3 Performances of the controller designed 47
LIST OF FIGURES
NO TITLE PAGE
2.1 PT326 hot air blower trainer kit 5
2.2 Basic elements of a closed loop process control system 6
3.1 Flow chart of project methodology 17
3.2 Gantt chart 18
3.3 Flow chart of basic PSO 20
3.4 Flow chart of basic HSA 22
4.1 Import data dialog box 25
4.2 The system identification tool window displays a ‘dry’ icon to represent the data
25
4.3 The data is plot in time plot window 26
4.4 Time plot window to display the original and the detrended data 26 4.5 ‘dryd’ icons added in system identification tool GUI 27
4.6 Selected ranges for model estimation 28
4.7 Selected ranges for model validation 28
4.8 ‘dryde’ and ‘drydv’ icons added in system identification tool GUI 28
4.9 Selection of linear parametric models 29
4.10 ARX model structure 29
4.11 The ARX orders of 441, 331, 332, 333, 223 and 233 29
4.12 Best fits 30
4.13 Zero and poles plot of ARXs models with different parameters 32
4.14 Zero and poles plot for ARX333 32
4.16 Simulation to track the performances of a hot air blower system
(without controller) 33
4.17 Coding in parameters estimation 37
4.18 Block diagram of the design GMV controller subsystem 37 4.19 Output response of the GMV controller with PSO when the
number of iteration is different
39
4.20 Output response of the GMV controller with PSO when the number of particle (NOP) is different
40
4.21 Line graph of the system response characteristics when the number of particle is different
40
4.22 Bar chart of the system steady state error (%) when the number of iteration is different
41
4.23 Output response of the GMV controller with HSA when the number of iteration (nt) is different
42
4.24 Output response of the GMV controller with HSA when the number of particle (Nhm) is different
42
4.25 Bar chart of the system steady state error (%) when the number of particle (Nhm) is different
43
4.26 Output response of the GMV controller 44
4.27 Output response of the GMV controller with PSO 45 4.28 Output response of the GMV controller with HSA 45 4.29 Output response of the GMV controller with HSA (different
stopping criteria)
46
LIST OF ABBREVIATION
ARX - Auto Regressive with Exogenous AWC - Anti-Windup Compensator FPE - Final Prediction Error
GMV - Generalized Minimum Variance GUI - Graphical User Interface
HMCR - Harmony Memory Considering Rate
HM - Harmony Memory
HSA - Harmony Search Algorithm NOP - No of particles
PAR - Pitching Adjust Rate
PBRS - Pseudorandom Binary Sequence signal PI - Proportional Integral
PID - Proportional-Integral-Derivative PSO - Particle Swarm Optimization
LIST OF APPENDICES
NO TITLE PAGE
A GMV controller (without algorithm) and GMV controller (with algorithm)
CHAPTER 1
INTRODUCTION
This chapter gives a general overview of the project, problem statement, project objectives and limitation of the project. Besides that, a brief methodology and report structure are also included in this chapter.
1.1 Overview
1.2 Problem Statement
A GMV controller is a controller to be designed in this project. The crucial part is to tune the GMV parameter in order to control the temperature of a flowing air. In order to solve this problem, two tuning methods (PSO and HSA) will be used to auto-tune the GMV parameters.
1.3 Objectives
The objectives of this project are:
1) To determine the mathematical model of the PT326 process trainer using System Identification approach based on Real Laboratory Process Data. 2) To design a GMV controller for the purpose of controlling the temperature of
air flowing.
3) To implement PSO and HSA in GMV controller for the purpose of tuning the GMV parameters.
4) To make a comparison and justification based on the controller performances obtained from the simulation.
1.4 Scope
1.5 Methodology’s Summary
The software used in this project is MATLAB. First of all, the mathematical model of the PT326 process trainer using System Identification approach based on Real Laboratory Process Data is determined. Then a GMV controller for the purpose of controlling the temperature of air flowing is designed. After that, PSO Algorithm will be included in GMV controller for tuning the GMV parameters.
If the output response of the system is correspond to the input signal apply, then the simulated result of GMV controller and GMV with PSO algorithm are compared and evaluated. Next, the HSA will be included in GMV controller. If the performance of the controller is not desire, troubleshooting is make before moving to the next step. Finally, a comparison and justification is make based on the controller performances obtained.
1.6 Report Structure
This report is organized in five chapters accordingly. The first chapter gives a general overview of the project, problem statement, project objectives and limitation of the project. Besides that, a brief methodology and report structure are also included in this chapter.
Chapter two is a literature review that highlight past studies related to the hot air blower system, PT326. Other than that, the background theory also be included in this chapter.
Chapter four presents the findings of the project. The comparison and justification based on the results obtained are discussed in this chapter.
CHAPTER 2
LITERATURE REVIEW
Chapter two is a literature review that highlight past studies related to the hot air blower system, PT326. Other than that, the background theory also be included in this chapter.
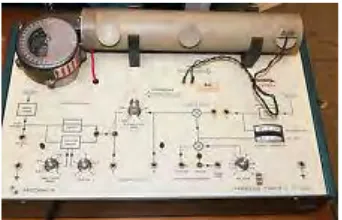
2.1 Overview of PT326
[image:21.595.243.414.562.672.2]The PT326 hot air blower trainer kit is a self-contained process and control equipment. Figure 2.1 shows the PT326 apparatus.
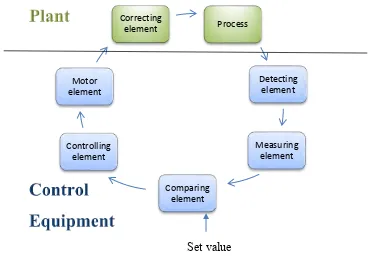
In this equipment, a centrifugal blower draws air from atmosphere and drove it past a heater grid and through a length of tubing to atmosphere again. The process involved in this equipment is the heating of the air flowing in the tube up to the desired temperature level. Whereas, a control equipment will measure the air temperature and compare it with a value set by the operator. It then generate a control signal which determines how much electrical power to be supplied to a correcting element. The basic elements that involve in this closed loop process control system is shown in Figure 2.2.
Figure 2.2: Basic elements of a closed loop process control system
In general, the input signal voltage range between 0 to -10V and the output signal voltage range 0 to +10V. The measured and set value meter scales from 0 to 80°C only. The minimum resistive load on any output is 5k𝛺. For controller, the continuous control proportional band is range from 200% to 5%. The temperature of the set value and measured value range from 30°C to 60°C. While the set value adjustment scale can up to 10 [12].
In 2005, Rahmat, Hoe, Usman and Abdul Wahab [1] use pseudorandom binary sequence (PRBS) signal of five different maximum lengths as an input signal to determine the open-loop and closed-loop model of PT326 process trainer. After that, the transfer function is obtain by using Cross-Correlation Technique.
The impulse response of the system can decays effectively to zero when the sequence of PRBS is increase and the bit interval is chosen wisely. Thus, it will increase the accuracy of the result.
Hot air blower system have output delays, noise and under actuator saturation [2]. Thus, Rehan, Ahmed, Iqbal and Hong have design a proportional-integral (PI) controller with Anti-Windup Compensator (AWC) to ensuring global stability and performance of the industrial application. The simulation and the experiment result show that the response without AWC and with actuator saturation has a lag. This is due to the windup caused by integral action of PI controller. Windup is prevented with the proposed AWC. It can be seen that the closed-loop response has no delay due to saturation. This paper suggested that Pade approximation can be used to reduce the memory consumption that is caused by the output delay term.
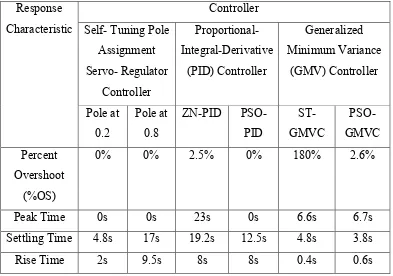
To control the hot air blower system precisely, Siti Fatimah [7] did a research about the system identification, estimation and controller design of a PT326 process trainer. Three types of controllers, which are self- tuning pole assignment servo- regulator controller, Proportional-Integral-Derivative (PID) Controller and Generalized Minimum Variance (GMV) Controller have been designed with two different tuning methods. The simulation results is shown in Table 2.1.
tuning method. The performance of PID controller is not very well as it need a longer settling time as compared to the other type of controller.
[image:24.595.134.527.438.714.2]In industrial applications, automatic temperature control of furnaces is essential for melting, studying the physical and chemical properties of elements and decomposing [7]. For industry, temperature control is very important when concerns with the safety of the equipment. Thus, Ijaz, Riaz, Rehan and Ahmed have develop three PI (proportional-integral) controller with slightly different parameters. This is used to control the temperature of a nonlinear hot air blower system. Three different regions of input signals will be consider when conduct system identification. The writer observed close loop response have small overshoot because of nonlinear dynamics of the system and actuator saturation. This paper discover that the amplitude of the actuator signal had risen for high frequency variations when temperature is increased.
Table 2.1: Performances of the controllers designed by other researcher
Response Characteristic
Controller Self- Tuning Pole
Assignment Servo- Regulator Controller Proportional-Integral-Derivative (PID) Controller Generalized Minimum Variance (GMV) Controller Pole at 0.2 Pole at 0.8
ZN-PID PSO-PID ST-GMVC PSO-GMVC Percent Overshoot (%OS)
0% 0% 2.5% 0% 180% 2.6%
Peak Time 0s 0s 23s 0s 6.6s 6.7s
Settling Time 4.8s 17s 19.2s 12.5s 4.8s 3.8s