City, University of London Institutional Repository
Citation
: Cox, M G (1975). Numerical methods for the interpolation and approximation of
data by spline functions. (Unpublished Post-Doctoral thesis, City, University of London)This is the submitted version of the paper.
This version of the publication may differ from the final published
version.
Permanent repository link:
http://openaccess.city.ac.uk/20601/Link to published version
:
Copyright and reuse:
City Research Online aims to make research
outputs of City, University of London available to a wider audience.
Copyright and Moral Rights remain with the author(s) and/or copyright
holders. URLs from City Research Online may be freely distributed and
linked to.
IKE CUT UNIVERSITY'
Department o f Mathematics
NUMERICAL METHODS FOR THE jTTTERPOLATRON AND AJPHIOXLMA.TION OF DATA BY SPLINTS FUNCTIONS
by
M a COY. BSc, AFINA
Thesis submitted fo r the Decree o f Doctor o f Philosophy
to the C ity U n iversity, St John S tr e e t, London
X S 5 </>?o
23
CDIMAGING SERVICES NORTH
Boston Spa, Wetherby West Yorkshire, LS23 7BQ www.bl.uk
BEST COPY AVAILABLE.
To ray w ife R osalie who suffered
my moods, and had only a part-time
husband during the preparation
I l l
ABSTRACT
NUMERICAL METHODS FOR THE INTERPOLATION AND
APPROXIMATION OF DATA BY SPLINE FUNCTIONS
I t i s often important in p ractice to obtain approximate representations
o f physical data by r e la t iv e ly simple mathematical functions. The
approximating functions are usually required to meet certain c r it e r ia
r e la tin g to accuracy and smoothness. In the past, polynomials have
frequ en tly been used fo r th is task, but i t has long been recognised that
there are many types o f data set fo r which polynomial approximations are
u n satisfactory in that a very high degree may be requ ired to achieve the
requ ired accuracy. Moreover, even i f such a polynomial can be computed,
i t frequ en tly tends to exh ib it spurious o s c illa tio n s not present in the
data i t s e l f .
In an attempt to overcome these d i f f i c u l t i e s atten tion has turned in
recent years to the use o f piecew ise polynomials or spline functions. A
spline function, or simply a sp lin e, i s composed o f a set o f polynomial
arcs, usually o f low degree, joined end to end in such a way as to form
a smooth function. Splines tend to have greater f l e x i b i l i t y than
polynomials in the approximation o f physical data and much atten tion has
been devoted in the la s t decade to the theory o f splin es. The development
o f robust numerical methods fo r computing with splin es lias, however,
lagged somewhat behind the theory. The main o b jective o f th is work is
the construction and analysis o f such methods. In order to obtain
e f f ic i e n t and stable metnods a representation o f splines that i s w e ll-
conditioned and that re su lts in fa s t computational schemes i s requ ired.
accordingly we study B-splines in some detain and give various algorithms
fo r calcu lations in which they are in volved.
when B-splines arc used as a basis fo r in te rp o la tio n oi’ least-squares
data f i t t i n g the re su ltin g lin e a r algebraic systems to be solved fo r the
spline c o e ffic ie n ts have a special structure. Stable numerical methods
that e x p lo it th is structure to the f u l l are presented.
Cur algorithms are used to obtain spline approximations to a v a r ie ty o f
data sets drawn from p ra c tic a l application s. Their performance on these
problems illu s t r a t e s the power o f splin es over more conventional
ACIOiOWLEDGEMENTS
This th esis is bassd on work ca rried out between i
969
and 1975 w hile the author was employed at the National Ph ysical Laboratory andre g is te re d at the C ity U n iv ersity as a part-tim e student fo r the
Degree o f Doctor o f Philosophy.
I am indebted to my in te rn a l supervisor Professor Y E P rice and my
extern al supervisor Mr J & Hayes whose guidance and encouragement
enabled me to complete th is work.
I also wish to acknowledge many f r u i t f u l discussions with
Mr E L ATbasiny, Mr & T Anthony, Professor C XI Clenshaw, Professor
W M Gentleman, Dr J H Wilkinson and my supervisors on various aspects
o f lin e a r algebra, ei'ror an alysis, sp lin e fu nctions, data approximation
and numerical methods in general.
v i
CONTENTS
T it le page 5.
Abstract i i i
Acknowledgements v
Contents
Introduction
Chapter 1 P lea tin g-p o in t arithm etic and error analysis
1.1 F loa tin g-p oin t arithm etic
1.2 F lo a tin g-p oin t error analysis
1
.3
Algoritluns and numerical s t a b ilit yv i
x i
1
4
14
Chapter 2 The numerical solu tion o f lin e a r algeb raic equations 19
2.1 The solution, o f trian gu lar systems 21
2.2 The lin e a r least-squares problem 24
2.3 Cholesky decomposition o f the normal equations 27
2.4 Gaussian elim ination 23
2.5 The use o f orthogonal transformations 34
2.6 The m odified Gram-Schmidt method 3&
2.7 The method o f Householder transformations ■ 40
2.8 C la ssica l plane ro ta tio n s 43
2.9 Modern plane ro ta tio n s 40
2.10 A comparison o f the p la n e-rotation methods with
other methods based upon orthogonal transformations
61
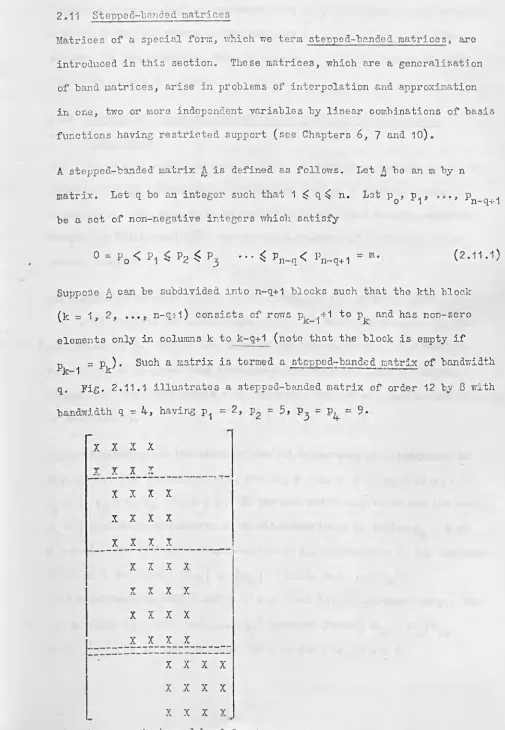
2 .1 1
Stepped-banded matrices69
2 .12
T ria n gu la r!2
ation o f stepped-banded matrices usingGaussian elim ination
70
2.13 Triangu.larizatioii o f stepped-banded matrices using
v i i
2.14 Orthogonal t r*i angular i z at :i. on o f stepped-bandcd
matrices using plane ro ta tio n s 79
2.15 The singular value decomposition 82
2.16 Perturbation bounds f o r the solu tion o f lin e a r
systems
87
Chapter 3 B--splines and th e ir numerical evaluation $2
3.1 D e fin itio n o f a spline function 93
3.2 The d e fin itio n o f a B-spline 93
3.3 The conventional method o f evaluating B -splines 101
3.4 A recurrence re la tio n fo r B-splines 103
3.5 The values o f B-splinos at the ends o f the range 111
3.6
The sum o f normalised B-splines and bounds fo rth e ir values
112
3*7 A p o s te rio ri error bounds fo r the values o f
'B-splines computed from divid ed d ifferen ces 115
3.8
A p o s te rio ri error bounds fo r the values ofB-splines computed by the method o f convex
c ombinat ions 117
3.9 A p r io r i error bounds fo r the values o f B-splines
computed by the method o f convex combinations ’ 119
3.10 The e ffe c t s o f perturbations in the data 122
3 .11
Numerical examples123
3.12 The evaluation, fo r a prescribed argument, o f a l l
non-zero B-splines o f order n 129
3.13 Other methods fo r evaluating B -splines 134
Chapter 4 D iffe r e n tia tio n and in tegra tio n o f B-splines 137
4 .1
Recurrence r e la tio n s fo r the d e riva tives o f140
145
149
150
157
156
162
164
170
172
175
181
18
?195
203
205
208
209 The d eriva tives o f the E -splines at the ends o f
the range
The d eriva tives o f B-splines at the knots
Algorithms fo r the evaluation o f B-spline
d eriva tives
The d e fin ite and in d e fin ite in te g ra ls o f
B-splines
The B-spline representation o f splines and
polynomials
The B-spline representation o f splines
The numerical evaluation o f a spline from i t s
B-spline representation
Error analyses o f algorithms fo r evaluating a
spline from i t s B-spline representation
The e ffe c t o f errors in the B-spline c o e ffic ie n ts
on the computed value o f the spline
The B-spline representation o f powers
Algorithms fo r computing the B -spline c o e ffic ie n ts
The B-spllne representation o f polynomials
Error analyses o f the algorithms fo r computing
B -spline c o e ffic ie n t s
The d eriva tives o f a spline represented dn
E-spline form
The in d e fin ite in te g ra l o f a spline represented in
B -spline fo r a
Representation in piecewise - Chebyshev-series
form
Spline in te rp o la tio n
i x
6
»2 The lin ea l' system: form ation - 2106-3 The lin e a r system: solu tion 213
6.4 Algorithms f o r the spline in te rp o la tio n problem 213
6.5 Error analysis 217
6.6
M u ltiple knots223
6.7
The choice o f e x te rio r knots223
6.8
A conjecture re la tin g to the'ch oice o f in te r io rknots and comments on the "well-posedness" o f the
spline in te rp o la tio n problem 226
6.9 Numerical examples 233
Chapter 7 Least-squares spline approximation 242
7 „1 The least-squares s p lin e - fit t in g problem 243
7.2 Method o f solu tion 244
7.3 An algorithm f o r least-squares spline
" approximation
248
7c4 Error analysis 250
7 .5
S e n s itiv ity o f the B-spline c o e ffic ie n t s toperturbations in the data 256
7.6 The important case o f cubic splines 259
7.7 Assessing the a c c e p ta b ility o f a least-squares
cubic-spline approximation
262
7*8
The choice o f knots 2647*9 Numerical examples • 266
7.10 Automatic knot s e le c tio n 284
7
« T1 Least-squares spline approximation o f amathematical function
287
Chapter
8
Spline f i t t i n g with convexity and concavityconstraints ■
291
8 .2
8.3
8.4
8.5
Chapter 9
9.1
9.2
9.3
9.4
9.5
Chapter 10
10.1
10. 2
10.3
10.4
10.5
10.6
References
A class o f constrained lin e a r approximation
problems
293
A representation o f cubic splines 2'j6
Constrained cu bic-spline approximation 301
Numerical examples • 305
The imposition o f boundary conditions and other
e q u a lity constraints
315
The im position o f a sin gle d e r iv a tiv e boundary
condition 315
Im position o f a set o f boundary conditions 318
Simple point constraints
320
Compound point constraints 320
Stable methods f o r the im position o f general
lin e a r constraints
321
M u ltiva ria te splines 327
In terp ola tion c f data on a rectangular mesh by
a tensor product o f u nivariate functions
327
Least-squares approximation to data on a
rectangular mesh by a tensor product of
u n ivariate functions 330
In terp ola tion and least-squares approximation to
data on a rectangular mesh by b iv a r ia te splines
332
The general least-squares m u ltiva ria te spline
approximation problem 335
The im position o f constraints 339
Evaluation o f a m u ltiva ria te splin e from i t s
B-spline representation 341
INTRODUCTION
ITany computations with polynomials have been, systematised in the la s t
two decades by the use o f Chebyshev s e rie s . Expressing the approximate
solution to a wide v a r ie ty o f problems as a polynomial in i t s Chebyshev-
series form has o ften proved extremely b e n e fic ia l. One o f the main
b en efits o f th is approach stems from the fa c t that in many applications
Chebyshev polynomials form an extremely w ell-conditioned basis f o r the
class o f polynomial functions. Examples o f the application o f Chebyshev
se rie s abound: in the f i e l d s o f fu n ction and data approximation,
in te rp o la tio n , quadrature, d iff e r e n t ia l equations and in te g ra l equations
are to be found many in te re s tin g and p ra ctica l re s u lts .
Polynomial splines are a gen era liza tio n o f polynomials in that a spline
o f order n includes, as special cases, a l l polynomials o f degree le s s
than n. We tre a t in some d e ta il in th is work what we consider to be a
splin e counterpart to the Chebyshev polynomials, v iz the B-splines. The
B -splines o f a given order defined upon a prescribed set o f knots form
f o r many purposes a w ell-conditioned basis f o r the class o f splines o f
that order with che same knots. Moreover, the B -splines too have
ap p lication to many problems in numerical analysis, including those
re fe rre d to above. Considered here are some o f the properties o f
B -splines, many o f which are new, and ways in which these properties can
be u t ilis e d to advantage in problems o f in terp o la tio n and approximation
o f d iscrete data.
The theory o f splin es has made s ig n ific a n t advances, p a rtic u la rly in
the la s t decade (see the bibliography by van R ooij and Schurer, 1973)»
a ft e r a r e la t iv e ly quiet period fo llo w in g the pioneering work o f
algorithms f o r spline compuiaxions has lagged s ig n ific a n tly behind the
th e o re tic a l development. Accordingly, in order to swing the balance a
fr a c tio n in favour o f the p ra c tic a l sid e , our approach i s predominantly
algorithm ic. We concentrate upon the development o f what we b e lie v e are
fundamental and useful algorithms f o r computing with splines expressed
in th e ir B-spline form* Many o f these algorithms are supported by
p ra c tic a l re su lts as w ell as by rigorous erro r analyses, the l a t t e r
often in d ica tin g the degree o f s t a b ilit y o f the algorithms.
Of the ten chapters in th is work the f i r s t f i v e con stitu te "backbone"
chapters upon which the remaining f i v e depend.
Chapter 1 i s prim arily expositors’- and discusses flo a tin g -p o in t arithmetic
and basic concepts r e la tin g to the erro r analysis o f computational
processes. Our approach i s e s s e n tia lly that propounded by Wilkinson
(s e e , in p a rticu la r, Wilkinson, 1955; P eters and W ilkinson, i 97l )- We
also describe the step-by-step manner in which our algorithms are
presented and what we understand by the numerical s t a b ilit y o f a
computational process.
The f i r s t part o f Chapter 2 i s also mainly expository in that methods
f o r the numerical solu tion o f lin e a r algebraic systems in both the
determined and over-determined cases are surveyed. The work o f
Wilkinson (p a r tic u la r ly Wilkinson, 1965; P eters and Wilkinson, 1970)
has again stron gly influenced our treatment. We then discuss the use
o f both c la s s ic a l and mod -m forms o f plane ( Givens) ro ta tio n s
(Gentleman, 1973; Hammarling, 1974) fo r so lvin g over—determined (le a s t -
squares) systems and g iv e reasons why we b e lie v e that plane rotation s
have advantages over other methods such as Householder transformations
x.i:ii
based on the timing analysis o f Wichmanu (
1973
) , c f the r e la t iv ee ffic ie n c ie s o f methods f o r least-squares problems. The second part o f
Chapter 2 contains d eta iled description s o f some new algorithms f o r the
solu tion o f the structured (stepped-bended) lin e a r systems that arise
in spline in terp o la tio n and approximation problems. For the fu lly -
determined square case (in te r p o la tio n ) via give algorithms based upon
G-aussian elim in ation (GS) and elementary transformations, and for.’ the
rectangular case algorithms based upon c la s s ic a l and modern forms o f
plane ro ta tio n (P il). The G-S algorithm can be considered as a
gen eralization o f the algorithm o f Martin and Wilkinson (1367) f o r Larded
systems, and the HI algorithm as a s p e cia lisa tio n o f the Givens algorithm
o f Gentleman (1973)» Our algorithms prove to have advantages in terms
o f s im p lic ity , speed and storage over those based on Householder
transformations f o r stepped-banaed lin e a r systems given by held (
1967
)and Lawson and Hanson (1974). F in a lly , i t i s shown that the powerful
singular value decomposition may be adapted to analyse stepped-banded
systems e f f ic i e n t l y .
In Chapter 3 polynomial splines and t h e ir properties are discussed and a
p a rticu la r form o f fundamental sp lin e, the B~spline, is introduced. A
new id e n tity (Cox, 1972) r e la t in g B -splines o f consecutive degrees is
then established. This id e n t it y , which expresses the value o f a B-spline
o f order n as a convex combination o f two B -splines o f order n -
1
, find which proves fundamental to our work, was discovered simultaneously inthe United States by de Boor (1972). We g iv e algorithms based upon the
conventional method employing divided d ifferen ces ana upon convex
combinations f o r evaluating B -splines. D etailed erro r analyses and
te s t computations are used to demonstrate con clu sively that algorithms
based upon the use o f convex combinations ore unconditionally sta b le f o r
a rb itra ry (even m u ltip le) knots, whereas algorithms employing divid ed
X-J.V
In Chapter 4 a recurrance re la tio n due to de Boor (1972) l'or the
d e riv a tiv e s o f B-splines is established. A new r e la tio n o f th is type
i s then obtained that proves to be an extension o f the fundamental
id e n t it y discovered in Chapter
3
. Two re su lts that prove to be o fconsiderable use in subsequent chapters are then established: the values
o f a l l E-spline d e riv a tiv e s at the ends o f the range, as w ell as certa in
d e riv a tiv e s at the knots, can a l l be computed in an unconditionally stable
manner. A class o f algorithms due to B u tte rfie ld (1975) f o r E-spline
d e riv a tiv e s in the general case is then outlined. F in a lly , some re su lts
r e la tin g to the d e fin it e and in d e fin ite in tegra tion o f B-splines are
given : these resu lts a l l appetir apparently f o r the f i r s t time, with the
exception o f one due to B u tte rfie ld (1975)> which i s a fu rth er
gen era liza tio n o f the id e n tity o f Chapter j>, and one discovered
independently by Gaffney (
1
974).Chapter .5 is concerned with various computations a ris in g from the
representation o f splines and polynomials in terms o f B-splines. Pc
present a p a rtic u la rly useful re su lt due to de Boor (1972) which expresses
a lin e a r combination o f B-splines in terms o f B -splines o f lower order
with certa in polynomial c o e ffic ie n t s . This re s u lt i s then -used to
establion a new proof t-ha«, the B -splines form a lin e a r ly independent set
o f basrs funccions in terms of which an a rb itra ry spline s (x ) can be
expressed, and oo esoablxsli lo c a l low er and upper bounds f o r s (x ) dn
terms o f i t s B -spline c o e ffic ie n t s . Two schemes proposed by de Boor (1972)
f o r the evaluation o f s (x ) are described and, f o r the f i r s t time, e r ro r
analyses o f these schemes, which demonstrate t h e ir unconditional
s t a b i l i t y , already observed em p irica lly by de Boor, are given. The
problem o f representing powers o f x in terns o f B -splines i s then
e r r o r analyses c a rrie d out. Methods f o r rep resen tin g in t h e ir B -splin e
form the d eriva tives and in te g ra ls o f r ( x ) are then considered.
Chapter 6 i s the f i r s t o f three "a p p lica tio n s” chapters and discusses
the in te rp o la tio n o f a data set 'ey splines o f a rb itra ry order with
a rb itra ry knot- p o sition s. A new algorithm, together with a d e ta ile d
erro r a n a lysis, i s presented f o r th is problem. Schumakor (1
96
?) has spoken o f the need f o r such an algorithm. In p a rtic u la r, i t i s shownthat i f B-splines are evaluated as recommended and i f one o f the algorithms
proposed f o r solvin g stepped-bandod systems is employed, the computed
spline i s the exact in terp o la n t o f a neighbouring data s e t. Choices f o r
tlie e x te r io r knots ( required in order to d efin e a f u l l s e t o f P-splino
basis fu n ction s) and the in t e r io r knots are discussed; in p a rticu la r the
dependence o f a certain condition number upon the p osition s o f these Imots
.is in vestig a ted using the singu lar value decomposition (SVD). Some
inform ative numerical te s ts are carried out and a p r a c tic a l problem :ia
solved.
Chapter ] i s the counterpart o f Chapter 6 in tho case where a le a s t-
squares approximation rather than an in te rp o la tin g function i s required.
A new algorithm i o r te s tin g whether a unique splin e approximant e x is ts in
any given case i s presented. F or the least-squ ares s p lin e - fit t in g
problem i t s e l f an algorithm f o r splines o f a rb itra ry order with a rb itra ry
knot p osition s is proposed. This algorithm again u t iliz e s the convex-
combinations scheme and the methods fo r stepped-banded systems and is a
gen era lisa tion o f that given by Cox and Hayes (1973) f o r cubic splin es.
An e rro r analysis o f th is algorithm is given and, with the aid o f the SVD,
an extremely encouraging conclusion i s made r e la tin g to i t s s t a b ilit y .
The important case o f cubic splin es i s discussed ar.d the question o f knot
xv.\
f i t s to re a l data sets are presented.
Chapter
8
concentrates on the typo o f problem where more information thanthat contained s o le ly w ith in the data set i t s e l f is prescribed. I t i s
shown that some important types o f continuous constraints upon the
approximating spline may be enforced by imposing upon the splin e a f i n i t e
number o f point constraints. A new representation o f cubic splin es is
then used, in conjunction with sn extension to algorithms due to
Barrodale and Young (1966) f o r L.j- and L w -approximation, f o r spline
f i t t i n g subject to convexity and concavity constraints. P r a c tic a l
examples are given to demonstrate the usefulness o f tho approach.
In Chapter 9 the incorporation o f lin e a r eq u a lity constraints in spline
approximation problems i s discussed. In p a rticu la r, i t i s shown that
boundary conditions may be incorporated re a d ily by a simple m odification
to tho b a sis. For more general constraints, algorithms f o r lin e a r le a s t -
squares problems with lin e a r eq u a lity constraints are discussed.
F in a lly , Chapter 10 discusses b r ie fly the extension o f some o f the methods
o f the e a r lie r chapters to more than one independent v a ria b le . The
in te rp o la tio n and least-squares approximation to data given at a l l
v o rtic e s o f a rectangular mesh by a tensor product o f u nivariate functions
is f i r s t discussed. The case wlie.ro the u n ivariate functions tire B-splines
is then trea ted . The general problem o f the least-squares spline
approximation o f a rb itra ry m u ltiva ria te data, f o r which an algorithm has
been given in the cubic case by Hayes and H a llid a y (1974), is then
CHATTER 1
FLOATING-POINT ARITHMETIC ANN ERROR ANALYSIS
This chapter is one o f three "backbone
'1
chapters to th is work; i t serves as an introduction to flo a tin g -p o in t a rith m etic, error analysis, algorithmand numerical s t a b ilit y . In Section i.1 vie summarise the rudiments o f
flo a tin g -p o in t arithm etic, adhering c lo s e ly to the concepts developed by
Wilkinson. In p a rticu la r, wo d e ta il those aspects o f flo a tin g -p o in t
arithm etic o f which we sh a ll make considerable usein subsequent chapters,
where we analyze a number o f computational processes relevant to spline
approximation. In Section i .2 we illu s t r a t e the type o f error analysis
vie sh a ll be carrying out by os:».mining some simple formulae fo r lin e a r
transformations and, from the re su lts o f our analyses, make a conjecture
r e la t in g to the analysis o f more general processes. We also discus.:
running error analysis and the derivation o f a p o s te rio ri and a p r io r i
error bounds. In Section 1.3 vie g iv e a b r i e f discussion o f algorithms
and what we understand by numerica l s t a b i l i t y . We also outline the way
in which we sh a ll present algorithm ic descriptions o f our computational
processes.
1.1 F lo a tin g-point arithmstj,c
Many o f the numerical methods described in the fo llo w in g chapters w i l l
be analyzed in terms o f th e ir implementation in standard binary flo a t in g
point a rith m etic.' In th is respect we shall fo llo w c lo s e ly the approach
o f Wilkinson (19^3, 19^5) •
A number x is termed a standard binary flo a t in,’- - poin t number i f i t car.
be represented by an ordered p air (a ,b ) such that x = a2*\ Here b, the
exponent, i s an in te g e r, p o s itiv e or n ega tive, usually r e s tr ic te d to the
Gy G
?
a, the mantissa, is a binary number, usu ally s a tis fy in g g ^ |a| < !,
with no more than t binary d ig it s . Typical values o f t l i e in the range
1
6 to 48. The value o f 2 “ is termed the r e l a t i ve machine p re c is io n .The number aero is represented in the non-standard form a = b = 0.
A re la tio n o f the form
y = f l ( x
1
* x2
* x^ * . . . « xn) , (1. 1.1)where ca,ch * denotes any one o f the arithmetic operations +, - , X or
4
, im plies that , x0, . . . , x and y aro stai', darà binary flo a tin g -p o in tnumbers (o r z e r o ), and that y i s the re su lt o f performing the appropriate
flo a tin g -p o in t operations. The m u ltip lica tion sign w i l l frequ en tly be
omitted; thus x
^ 2
im plies / x ? . The d ivis io n sign (-)) w i l l frequ en tlybe replaced by slash (/ ) or a h orizon ta l lin e , in the usual way.
Parentheses on the right-hand side o f (1 .1 .1 ) are often necessary to
remove ambiguity or to emphasise the order o f the computation. Otherwise
the sequence o f flo a tin g -p o in t operations i s assumed to take place from
l e f t to r ig h t, with the usual ru les o f precedence o f X and ~ over + and
Thus, fo r example, y = fl(x .j X
7
y'* ) im plies ( i ) y^ = fl(x ^ X x ^ ),( i i ) y - flC.vg. t y = f l ( - ^ - —— l i t ) im plies ( i ) y^ = f l f r ^ ) ,
5 6
( i i ) y
2
= n ^ '3x^ > ^i i i ) ^ ( i v ) y4
= f i ( x5
-x é) ,( v ) y = f l ( y y yif) • hi/idently, any ra tio n a l arithm etic expression can be
represented in iio a tin g -p o in t arithm etic terms by compounding basic
operations o f the form y = f l ( x « x ^ )•
We assume that the rounding errors in the operations are such that
flC * ,* " ^ ) = ( -
1
’!!x2
) ( l + e ) ,(
1.
1.
2)
For m u ltip lica tio n and d ivis io n the value o f s w i l l bo taken as zero
i f e ith e r x or is an in te g ra l power o f 2. Y/o assume fu rth er that
re la tio n s o f the type
fi(xi±:;2) = ( x ^ g V C l + e ) ,
(1.1.4)
where s s a t is fie s (1 .1 .
3
) , also hold. Relations ( l . 1 J h) are due to Kahan (see Peters and Wilkinson, 1971) and are sometimes more convenientthan (1 .1 .2 ). In any p a rticu la r situ ation we sh a ll use e ith e r (1 .1 .2 )
or (1.1 J\) as appropriate.
Wilkinson (19^3) states that some computers have less accurate rounding
procedures than those which give the above re s u lts , but we assume (as do
Peters and Wilkinson (197"1) in a d iffe re n t context) that the d ifferen ces
are not o f great consequence.
We sh a ll also make use o f the rela tio n s
(
1+2
* ) ° <(1
+1
.06
s2
^ , (1 .1 .3 )( l -
2
- t ) “ S <1
+ .1
.1282
“ *, (1
.1
.6
)where s is a p o s itiv e number (o fte n in tegral
(
1
.1
.6
) hold as long as s and t s a tis fy thel ) . Relations (1 .1 .5 ) and
mild r e s t r ic t io n
s
2
_ t <0
.1
. (1 .1 .7 )Y/e assume throughout th is work that the in eq u a lity (
1
.1
.7
) i s s a t is fie dfo r a l l (reasonable) values o f
5
that a ris e . (On the English E le c tr icXDF9 computer, fo r which t=39, th is means that s can be as la rge as
(
0
.1
)2
"^ = 5*5 X 1 0 )• R elation (1 .1 .5 ) is given by Wilkinson (1963
:sh a ll sometimes use re la tio n (1 .1 ,5 ) in the form
(1+2” t ) s < 1 + s2 ‘1,
where
2 t l = ( 1 .0 6 ) 2 " *
(
1
.1
.8
)( 1 .1 . 9 ;
We observe that re la tio n (1 .1 .7 ) is th erefore equivalent to the in eq u a lity
52
< 0.106 .
Moreover, (1 .1 ,5 ), (1 .1 .6 ) and (1.1 .7) y ie ld
(
1+2t)s <
1.106(
1
.1
.10
)and
(
1 -2
“) S <1 .1 1 2
.(
1.
1.
11)
(
1
.1
.12
)Throughout th is work, unless otherwise stated, a (w ith or without
subscripts or superscripts) denotes a number s a tis fy in g
]e| ^
2
- t
( 1 .1 .1 3 )
and e (again with or without subscripts cr superscripts) a number
s a tis fy in g
|e) < f A J J i *\
V •
1
• ‘WT/e sh a ll o ften estimate the arith m etical work r
computational processes by counting the number
A long operation is one flo a tin g -p o in t m u itip li
d iv is io n .
1.2 F loatin g-poin t error analysis
equired by various
o f long operations required.
cation or one flo a tin g -p o in t
As an illu s t r a t io n o f the type o f flo a tin g -p o in t erro r analysis we s h a ll
be carrying out in subsequent chapters, we examine various formulae fo r
and
6
, where i t is important that they are ca rried cut in a m inericaU y stable manner. We w i l l see that the erro r analyses in dicate very ole-'irlywhether a p a rticu la r way o f computing the transformation is stable or
p o te n tia lly unstable and, in the l a t t e r case, the reasons fo r the in s t a ll l a t ;
Consider the lin e a r transformation
X = (2x - a - b )/ (b - a ) , (1.2.1)
which maps the in te rv a l £ a ,b ] in to {^-
1
, +1
J . When implemented inflo a tin g -p o in t arithm etic the computed value X o f X w i l l bo contaminated
by rounding e rro rs. Our aim i s to produce a bound fo r j b x j , where
SX = X - X,
(
1.
2.
2)
which holds fo r a l l x
6
M . We seek a function K (a ,b ) such that|
6
X| ^ K (a ,b )2
_ t . (1 .2 .3 )I t may seem somewhat surprising that v.e employ th is formal approach to
such an apparently innocuous computation as (1 .2 .1 ). The point we wish
to stress, which we hope i s brought out ry our analyses, is that atten tion
to d e t a il is o f v i t a l importance in th is and in many other computational
processes. For instance, the nature o f the erro r introduced in forming X
i s dependent upon the precisa ordering of the basic arithm etic operations
in (
1
.2
.1
) and, moreover, is influenced even mora i f (1
.2
.1
) i s re-expiessedin certain other mathematically equivalent but computationally d is tin c t
forms.
Three possible ways o f carrying out the transformation are given by
(1 .2 .4 )
X t - a
5
X = 2x-(a*b)b-a (1 .2 .5 )
6
X = cx - d, ( 1 . 2 .o)
where
c = 2/ (b -a ) ,
d = (a+ h )/ (b-a).
A flo a tin g -p o in t error analysis o f (1 .2 .
4
) y ie ld sX = { ( 2 x - a ) ( l + e 1) - h } (l+ e 2) ( l + e
^)(1
iK^)/(t>-a).(1 .2 .7 )
(1.2.8)
(1 .2 .9 )
where
iSil *
^2
_ t ( i = i ,2 ,3 ,4 ), (1
.2
.10
)from which
SX = X-X = ( e (2x-a)+3e (2 x -a - b )}/ (b - a ),
^ 1 t—
(1.2.11)
where
lell
, , e0] <C2
, " t l(
1.
2.
12)
Thus
£,X = e. {b / (b - a )+ x } +
3
e2X (1.2 .13)and hence
1
cX| < { j b i / ( b - a ) + t } f t 1 . (1
.2
.1
L;y/e see immediately from (1 ,2 .1 4 ) that the error in the computed value o f
X may be appreciable i f the length b-a o f the o rig in a l in te rv a l is small
compared with the'magnitude o f b.
Analysis o f (1 .2 .5 ) and (1 .2 .6 ) re s u lt in bounds fo r £X sim ilar in form
to (1 .2 .1 4 ). This state o f a ffa ir s is p a rtic u la rly unfortunate in the
case o f the tn ir d form o f the transformation equation because the use c f
(
1
.2
.6
) appears to be eminently sensible i f the transformation i s to beused fo r a large number o f x-values, since the constants c and d can be
7
A fou rth fern o f the transformation, which we now study, is u n cord;tion aily
sta b le. Consider the use o f the expression
X = { ( x - a ) - ( b - x ) } / (b -a ) (1.2 .15)
to compute the value o f X . An error analysis o f th is "somewhat \;nnatural"
form gives
{ M i l + e ^ - M C l + e ^ } (l+ e
5
) ( l + e4
) ( l + e 5) ^>2
^ b - awhere
j u . j ^
2
“ t ( i =1
,2
,3
,4
,5
) ,from which
SX =
( n_ ^ f v — \ -r - ( - i.N
b - a
(1.2 .17)
(
1
.2
.18
)where
h i» h l> h ! <2' t1-
(1-2-19)
Thus, since ? a ^ b, i t fo llo w s from (■'.2.18) and ( l . 2 . i y ) that
fo x j < (4 )2 " t1 .
(
1.
2.
20)
Note that the form (1 .2 .1 5 ) is computational!;.- no mere expensive than
(1 .2 .A) or (1 .2 .5 ), but unlike them y ie ld s at worst a very small erro r.
We now consider b r i e f l y a second stable form, having an error round only
s lig h t ly in fe r io r to (1 .2 .2 C ). The approach is based upon carrying out
the lin e a r transformation ( I .
2
.1
) in two stages, v iz . transformation tothe in te r v a l £ o , l j , follow ed by transformation to C~
1
, l } . Error analyses o f the "obvious" transformationsr = f-0“ ci. (* .
2
.2 1
)8
X = 2X’ -1,
vrhioh carry out inns two—stage pi’ ocess, y ie ld
* ' = | r f
(1-2.22)
(
1
.2
.23
)and
X = (2 X '- a )(l+ e ^ ) = (l+ c
1
) ( l + e9
) ( l +e ^ ) * i | ( i +e^ ) , (1 .2 .2 4 )where X' is the value o f the intermediate v a ria b le , computed values are
denoted by "bars" as usual, and.
| s . | ^
2
' t ( i =1
,2
,3
,4
)From (1 .2 .2 4 ),
6c ( x - a ) r
5X = X-X = --- + e„<
(1.2.25)
where
b-a
hi- k l < A
4
^ -
4
-from which
M < ( 7 ) s " t l .
(
1
.2
.26
)(1.2 .27)
(1.2 .26)
The transformations (1 .2 .2 1 ) and (1 .2 .2 2 ) can o f course be combined to
form the sin gle transformation
2 (t-&)
b-c (
1
.2
.25
)or, expressed s lig h t ly d iffe r e n t ly , as
b-a (
1
.2
,30
)I t i s r e a d ily established that the use o f (1 .2 .2 9 ) also gives an erro r
s a tis fy in g (1 .2 .2 3 ) and that the bound fo r (
1
.2
.30
) s a t is fie s¡
6
X | < (6
)2
" t l .9
A much more d eta iled an alysis, which takes in to account the precis's
nature o f the b it patterns in the mantissae o f the flo a tin g -p o in t
representations o f a, b and x, revea ls that fo r nearly a ll values o f those
numbers the bound (1 .2 .1k) is unduly p essim istic. In p a rtic u la r, the
analysis shows that in these cases the value o f e in (
1
.2
.9
) is zero,with the consequence that in ( i .
2
.1 1
) is zero and hence16x| < (3)2~t i .
(1.2.32)
However, the d eta iled analysis also shows that there are values o f the
numbers a, b and x which r e s u lt in e ^ being ex a ctly equal in modulus to
2 . In these cases the bound (1 .2 .1 4 ) proves to be r e a l i s t i c and predicts
accurately the magnitude o f the actual error in the computed value o f X.
D eta iled analyses o f (
1
.2
.3
) and (1
.2
.6
) re vea l that the correspondingbounds are in fa c t r e a l i s t i c fo r most, rather than a few, values o f a, L
and x . I am indebted to Dr J H Wilkinson who suggested the method o f
approach to these detailed analyses.
The main conclusion to be drawn from the above r e la t iv e ly simple analyses
is that fo r s t a b ilit y the transformation should be expressed in a form
that ensures that the magnitude o f each intermediate computed quantity is
rela ted as appropriate to the length o f the o rig in a l or o f the transformed
in te r v a l. Tie see that the unstable formulae (
1
.2
.4
) ’, (1
*2
.3
) and (1
.2
.6
) a l l produce as intermediate qu an tities numbers re la te d to the absolutevalue o f the untransformed v a ria b le , a number having no re la tio n to the
length o f the o rig in a l in te r v a l. On the other hand, the intermediate
qu an tities produced by the stable formulae (
1
.2
.13
) , (1
.2
.2 1
) and(
1
.2
.22
) , (1
.2
.29
) , and (1
.2
.30
) are a l l re la te d to the lengths o f the o r ig in a l or transformed range.Extrapolating th is conclusion we conjecture that numerica] processes in
general are more l i k e l y to be stable i f , wherever p o ssib le, the intermediat
10
computed qu an tities are not allowed to grow too la rg e (o r , in spine
rather special instances, too sm all). The p rin cip le c e rta in ly holds fo r
Gaussian elim in ation , fo r i t is known (fie ld , 1971) that whatever stra tegy
(whether i t he p a r tia l p iv o tin g , complete p ivo tin g , p ivo tin g down the
main diagonal, e tc ) is employed, a hound fo r the departure o f the lin e a r
system actu a lly solved from that req u ired to he solved is re la te d d ir e c t ly
to the la rg est matrix element at any stage o f the reduction. I f a lin e a r
system (square or rectangular) is solved using orthogonalization methods
then no growth can occur (P eters and Wilkinson, 1970), with the re s u lt
that the process i s sta b le.
In the numerical methods we discuss we adhere to th is general p rin cip le
wherever p ossib le. P a rticu la r instances are the use o f plan
0
rotation s(Chapters 2 and 7 ), elementary s ta b ilis e d transformations (Chapters 2 and
6
) and the taking o f convex combinations. The la t t e r process is basic tomany o f our computations (Chapters k, 9,
6
and 7 in p a rtic u la r).We do not reproduce error analyses o f w ell-accepted numerically stable
methods such as the modified Gr'am-Schmidt process, Householder
transformations and c la s s ic a l Givens ro ta tio n s fo r solving lin ea r systems,
since such analyses abound in the lit e r a t u r e , the key reference being
Wilkinson (1 9 » 5 )• However, wherever appropriate, we analyze methods that
have appeared recen tly or have been developed during the course o f th is
work.
Y.'e s h a ll carry out, in la t e r chapters, flo a tin g -p o in t error analyses o f
various recurrence re la tio n s which a rise in the solution o f lin e a r systems
and in certa in computations with splin es. In p a rticu la r we s h a ll sometimes
( i ) employ a "running" erro r analysis (P eters and Wilkinson, 1971) to
enable the computer i t s e l f to determine rigorous bounds on the errors i t
11
occasion ally, ( i i i ) obtain a p r io r i absolute or r e la t iv e error bounds.
To giv e the fla vo u r o f the types o f re s u lts re obtain we analyse a simple
example.
Consider the fo llow in g recurrence re la tio n which defines and generates
the Fibonacci numbers:
f = f . •h
fr “ f r - i + f r
-2
( r -2
» 3 » « - * ) ^(1.2.33)
Suppose th is computation is carried out in flo a tin g -p o in t arith m etic.
Let f denote the computed value o f f^ and b?r = f r ~ fr • Then
1 =
r , =
f , 6 f = o
o 0
f , , f-f. = 1 1
0
and
Thus fo r r ^ 2,
(1.2 .34)
f r = f l ( f r _ 1+ fr _ 2) = ( f r _ i+ fr _2) / ( l + e r ) ( r = 2 , 3 , . . . ) . (1.2.35)
(
1
+e ) f = f + f0
' r r r
- 1
r-2
(1.2.36)and th erefore
f +r
6
f +r r r b f = f r-1
+6
f _ ,+ f r-1
r-2
_+6
f r-2
0
The use o f (1 .2 .3 3 ) reduces (
1
.2
.37
) to(1 .2 .3 7 )
6
f = £ f , + t f c-e f .r r-1 r-2
r r (1.2 .38)Thus
t f r | S
(1.2.39)
12
Fo = F, -
0
..P = S>
r r-
-1
r+P-2
+ f rJ
(1
.
(■1.2.AO)So, at the same time as i t forms the f^ , the computer can form the values
F . Such a process is c a lle d a running erro r analysis. However, lik e the
f . the values o f F cannot ha formed ex a ctly , since rounding errors are
r r
made in computing the erro r r e la tio n (1 .2 .4 0 ): This apparent d i f f ic u lt y
is e a s ily overcome as fo llo w s . Let F be the computed value o f F^. Then
the computational equivalent o f (
1
.2
.40
) 3sF = f l ( F ,+P 0+ f )
r r
- 1
r-2
r= f ( F ,+F 0) ( U e, ) + f ! ( l +
2
„ )1
/ r-1
r -2
/v1
, r ' r j v2
,r (1
.2.41)Thus, since the F^ and tho f^ are non-negative, the contribution tc the
erro r incurred in computing from (1 .2 .4 0 ) is at most a m u ltip lic a tiv e
-t -2
fa c to r (1-2 ) . Hence, since 6 fo= 6 f)=0,
j f f r | .<
2
“ t ( i -2"t )2
2
rF.Notì, by v irtu e o f (
1
.1
.12
) ,( l -
2
_ t ) 2_2r <1
.1 1 2
.Hence, since F >
0
fo r r ^2
,(1.2.42)
(1.2.43)
|of.| < (
1
.112
)2
" * Fr . ( r >2
) . (1
.2
. V i)This I’ esu lt i s an a p o sterio ri absolute error bound. Although such a
re s u lt is extremely useful in. p ra c tic e in that it. enables a rigorous
bound on the absolute error in the computed value to be obtained, i t t e l l s
us nothing about the q u a lita tiv e nature o f the e r r o r growth in the
computation. In other words i t does not t o l l us whether the bound grows,
13
certain -favourable case» the running er.ror analysis approach can give
r is e to a p o s te rio ri bounds which not only display th e ' q u a lita tiv e nature
o f the growth but also obviate the need a ctu a lly to use a running error
rela tio n sh ip lik e (
1
.2
-40
) (which, imvi d en ta lly, requires even morecomputational e ff o r t than the basic recu rren ce!). For instance, fo r the
above example we sh a ll show th at, fo r r
2
, F^ s a t is fie s the in eq u a lityFr ^ (l4 2 " t ) r " 2( r - l ) f r , (1-2.45)
and hence that
¡5 f r j ^ 0 +2~t ) r " 2(r - l ) 2 * 't f r . (1 .2 .46)
In order to establish th is re s u lt we f i r s t assume i t to be true fo r
24
,, F , ^ Then the substitution o f (1.2 .45) (w ith r - i and thenr
-2
replacing r ) in to the right-hand side o f (1
.2
.40
) and the use o f (1
.2
.36
) givesFr < (l+ 2 " t ) r " 3( r - 2 ) f r _ 1- .(l+2-t ) r ^ ( r - 3 ) f r _ 2H-fr
< ( l +2-t ) r " 3 { ( r - 2 ) ( f r _ 1+f ^ 2)+'fp )
^ (
1
+2"t )r " 3
[ ( r -2
) ( l +2
‘ ! ) f r+ f r ]< ( i + 2 " t ) r “ 2( r - l ) f r . (1.2 .47)
But from (1 .2 .4 0 ), F
2
= f^ . Ileneo (1.2 .45) is true fo r r - 2 and by induction th erefore fo r a l l r2
.Having established a re s u lt o f the form (1 .2 .4 5 ), i t may then be possible
to obtain an a p r io ri r e la t iv e error bound. F ir s t ly (1 .1 .1 1 ) is used to
' \
sim p lify (1.2 .45) s lig h t ly to give
Vr $
1
.106
( r - l ) f r (1 .2 .4 8 )14
K r-1 )
But the r e la t iv e error in f is simply
f - f
r r i fr M / ?r
fX* f r - b fr
1
- i f r / f rt
\4.? iiS -)
f
\ «¿1r\ 0)
/ 1.1Q6(r-i)2~'t
1-1.106(r-l)2“ t
<
1
•I06
( r - l )2
" t1-0.1106
< 1.244(r~l)2_ t , (1.2.51)
using (
1
.1
.7
)* V/e can th erefo re sta te, befo re the computation is sta rted ,that the r e la t iv e error in the computed value o f f cannot exceed
1
,? 4 4 (r -l)2 l’ . This re s u lt i s absolute 3.y r i r orov.s; in practice thes t a t is t ic a l e ffe c t s o f rounding errors are more l i k e l y to give an actual JL _j0
error o f the order o f ( r - l ) ‘ 2 . However, the importance o f a resu lt o f
the type obtained here is not only that the precise natui’e o f the error
bound has been obtained, but also that an a p r io r i erro r bound car. be
obtained at a i l and, as we w i l l see in Section i t h a t the computation
has he«ii shown to be unconditionally numerl m i? stable.
1
.5
Algorttluas and numerical s t a b ilit yAn a lg o r it hm is a procedure (s e t o f ru les , re c ip e ) fo r obtaining a solu tion
to a s p e c ific mathematical problem. An algorithm describes in an
unambiguous manner the way in which a requ ired o<4c c f numbers, the
solut io n , may be computed from a given set o f numbers, the data. For
instance, the recurrence r e la tio n (
1
.2
.35
) constitu tes an algorithm fo rcomputing the Fibonacci numbers f _ , f „ , . . . from the data ( i n i t i a l conditions)
15
Let the m-vector x denote a set o f data values supplied to an algorithm L,
Let the n -vcctor f denote the solution obtained by A u-sing exact
arithm etic and the n~vector f the solu tion obtained by A using standard
flo a tin g -p o in t a rith m etic.
Every algorithm has a domain o f applicab i l i t y X (R ice, 1971; Cox, 1974),
defined by the set o f data x fo r which the algorithm can provide the
desired solution f . For instance, X = j x«£- 0j fo r an algorithm which
computes the p o s itiv e square root o f a r e a l number x; in p ra ctice there
w i l l be an upper bound M fo r the values o f x fo r which the algorithm i s
designed, in which case X = ^x j 0 $ x ^ Li j .
A w i l l be termed unconditional l y numerically stabile i f , fo r a l l :: G X,
the implementation o f A in standard flo a tin g -p o in t arithm etic provides a
solution f which in some sense bears a close resemblance to f . Probablyfv* MM^**""**** 1~~IT '■ r\t
the most desirable form o f closeness is
IlH lU v ' * Hill -
(1 .3 .1 )where
2
is the r e la t iv e machine p recisio n , as b efore, and K,, is re la teu to the p a rticu la r process employed in A. jj . jj denotes any convenientvecto r norm«. I f the computed solution is a sin gle value then || . jj may
be replaced by j . j in the usual way. Often, fu r a p a rticu la r process,
.is e ith e r a constant or depends upon a small number o f parameters
r e la t in g to that process. Sometimes an expression fo r K, can be determined
* 1
a p r i o r i ; in other cases K, may be the re s u lt o f a running error analysis
or an a p o s te rio ri analysis.
I f K^2 1 then (1.3• 1) may be considered an ex cellen t bound in that the
r e la t iv e error in the computed solution w i l l be small.
Sometimes i t may oe d i f f i c u l t or impossible to obtain a bound o f the form
16
fl-i
II <V "V
(1.3.2)where, as b efo re, Kg i s a constant or i s r e la te d to the p a rticu la r
process, but
M = max // T I/’ .
x
6
Xv t
0 - 3 . 5 )
L. i then 0 .3.2) may also in dicate a stable algorithm. Of course,
(
1
.3
.2
) i s a somewhat weaker- re su lt than (1
.3
.1
) in that whereas( 1 . 3 , 1 )
gives a bound on the r e la t iv e erro r and, consequently, on the absolute
e rro r, (
1
»3
.,2
) merely gives a bound on the absolute erro r, which may or may not imply a s a tis fa c to ry r e la t iv e error bound.An algorithm w i l l he termed co n d itio n a lly numerically stable f f a re s u lt
o f the form (1 .3 - 0 or 0 - 3 - 2 ) holds fo r an id e n tifia b le subset X' o f X.
For some algorithms i t is not easy to quote a re s u lt as straightforw ard as
(1-3-1 ) or (■ -
3
-^/1
, oven i f such a re s u lt can be obtained at a l l . However, we can sometimes say that a p a rticu la r algorithm is "good" because i tfx b ib t t s Stable behaviour in practice fo r most, x
6
X, although no th e o re tic a lstatement o f behaviour is e a s ily obtained. The values o f x G X fo r which
the algorithm f a i l s to produce good re su lts may correspond to path ological
or extreme situ a tion s, eg to data sets u n lik ely to ¿ ris e in p ra c tic a l
a p p lica tio n s.
For some algorithms rigorous erro r bounds can be determined, but the bounds
are most u n lik ely to be attained or even approached at a l l c lo s e ly . A good
example i s the bound associated with Gaussian elim ination with p a r tia l
p ivo tin g fo r solvin g lin e a r algeb raic systems (F ilk in son ,
1965
:p97
) , which contains a fa c to r o f 2 , where n is the order o f the system. I t mightbe thought th erefo re that fo r systems o f quite modest size tbs - - i.
17
However,- nothing could 'be fu rth er from the truth since, apart from
a r tific ia lly - c o n s tr u c te d examples ( f o r an in te re s tin g example see
Wilkinson, 1961), a more r e a l i s t i c , though not rigorou s, bound fo r
p ra c tic a l purposes contains a fa c to r o f the order o f unity rather then
„n-1
Most o f the above discussion re la te s to fo rward error analysis in which
a measure o f the closeness o f the computed solution to the actual solution
i s sought. Per many algorithms i t i s more meaningful and releva n t to vise
a baolrward error analysis. In such on analysis the solu tion obtained is
in terp reted as the exact solution o f a problem with data x which is
(h o p e fu lly ) only s lig h t ly d iffe r e n t from x. Bounds upon
j|
x~xJ|
are then sought, which again in dicate whether the algorithms can be considered asbeing numerically stable.
Many o f the computational processes we discuss ere accompanied by
commented algorithms. These algorithms ere intended to provide a
d e fin it iv e "
1
nterfo.ee" between a "casual" description o f a computational process and i t s formal implementation in a h ig h -le v e l language such asA lg o l or Fortran. Ve b e lie v e that a reader knowledgeable in a. h ig h -level
language would re a d ily be able to code these algorithms. For commercial
reasons we are unable to l i s t actual codes in th is work. However, a l l the
algorithms presented here have been programmed in A lg o l 60, Fortran FT or
Babel, an A lg o l- lik e language due to Scowen (
1969
) . Apart from ther e l a t i v e ly t r i v i a l illu s t r a t iv e algorithm s, such as Algorithm 1.3.1 below,
they have been tested c a re fu lly on a wide v a rie ty o f both model and
p r a c tic a l problems.
\7e use the algorithms as b u ild in g blocks, je s t as procedures are used in
A lg o l and subroutines in Fortran . Pul example, the r e la t iv e ly simple
algorithms in Section
2 ,1
fo r solvin g tria n gu la r systems are needed byin the subsequent sections o f Chapter
2
. In turn, the algorithms in Chapters6
and 7 fo r spline in te rp o la tio n and least-squares spline approximation make use o f the algorithms fo r lin e a r systems.Each algorithm i s described by a sequence o f steps or stages. Most steps
describe one or more o f the fo llo w in g operations: assign a value to a
v a ria b le ; advance or return to a stated step i f a condition is s a t is fie d ,
execute the stated steps the stated number o f times. These three types o f
step occur freq u en tly. Occasionally we need to make use o f a dummy
statement (o r n u ll op era tion ), io a statement whose presence is necessary
to describe unambiguously the flow o f a computational process. For th is
n u ll operation wo borrow the term Continue from the Fortran language.
Other types o f step also appear; we b e lie v e that most o f these are s e lf -
explanatory: q u a lific a tio n w i l l be given where thought necessary. TThere
appropriate the algorithm ic steps are in terspersed by comments or remarks
which help r e la te the various stages o f the algorithm to those o f the
computational process being implemented. In p a rtic u la r, i f a special
storage strategy is employed, such as in the algorithms o f Sections 2.12 to
2 .14
fo r stepnod-banded matrices, the algorithm ic steps r e fe r to thenotation appropriate to the sp ecia l stra teg y, whereas the comments r e fe r to
the natural storage notation.
As a very simple illu s t r a t io n o f the form o f our algorithms, the recurrence
r e la tio n (1.2.337 fo r generating the Fibonacci numbers i s described by
Algorithm 1.3*1 below.
Algorithm 1.3*1: Generation o f the Fibonacci numbers f . f ... f .
— —--- o
1
nComment: I n i t i a l i z a t i o n .
Step 1. Set i Q = 1 and f = 1.
Comment; ilecur the defin in g r e la tio n fo r the Fibonacci numbers.
Step 2. For r = 2 ,3 ,.. .,n form f - f , + f
19
CHAPTER 2
THE NUMERICAL SOLUTION OP LINEAR ALGEBRAIC EQUATIONS
Frequent use i s made throughout th is work o f methods fo r the solution o f
systems o f lin e a r equations (Chapters
6
,8
arid 10) and also fo r the le a s t-squares solu tion o f systems o f over-determined lin e a r equations (Chapters
7
and 10). Accordingly, th is chapter i s devoted to the description o f numerical
stable methods fo r solvin g such problems. We concentrate p a rtic u la rly upon
the lin e a r least-squares problem, since the solution o f a system o f lin e a r
equations can be considered as being included as a special case. The lin e a r
least-squares problems that a rise from the use o f polynomial splines as
approximating functions tend to be h igh ly structured, i f a su itable basis
fo r the spline is employed. The so -ca lled observation matrix (S ection 2.2)
proves to have special properties in that many o f i t s elements are aero and,
moreover, the d isp osition o f the non-zero elements can be characterized in
a straightforw ard manner. Sim ilar remarks apply to the systems o f lin ea r
equations a ris in g from spline in te rp o la tio n problems.
In order to obtain e f f ic i e n t algorithms fo r solvin g these problems i t is
important to take advantage o f the special structure o f these matrices.
F ir s t l y , however, we outline a number o f methods cu rrently a vailab le fo r
the solu tion o f dense lin ea r least-squares problems and consider subsequently
ways in which they can bo modified so that structured problems can be trea ted .
There are six methods in current use:
( i ) Choleskv decomposition o f the normal equations ,
( i i ) Gaussian elim ination
( i i i ) Gram-Schmidt orthogonalization
( i v ) Householder transformations
( v ) Givens rotation s
(v.i) The singular value decomposition
applied to the
2 0
For our purposes the use o f Givens ro ta tio n s proves to be most appropriate.
In order to establish th is we g ive a b r i e f description o f each approach,
together with i t s merits and demerits.
In an attempt to obtain the utmost numerical s t a b ilit y , the methods applied
to the observation matrix are sometimes implemented so as to include a
column-interchange (p iv o tin g ) strategy (see, fo r example, Golub, 1965;
Businger and Golub, 1965 and Peters and 'Wilkinson, 1970). Unfortunately,
the interchanging o f columns tends to destroy the nature o f the sero-non-
sero structure. Since in our work we wish to take f u l l advantage o f
structure, we would be prepared to accept a s lig h t loss o f numerical
s t a b ilit y i f the avoidance o f column interchanges le d to s ig n ific a n t ly more
e f f ic i e n t algorithms.
There i s evidence both em pirical and th e o r e tic a l that the behaviour o f the
m odified Gram-Schmidt method (see Section 2.6) is not improved by column
interchanges. For instance, a fte r obtaining considerable computational
evidence, Rice (
1966
) concluded that interchanges re s u lt in a perceptiblebut small (even n e g lig ib le ) improvement. In a detailed! th e o re tic a l flo a tin g
point error analysis Bjftrck (
1967
) concluded th a t, regardless o f whether ornot interchanges are made, the errors in the computed solution are less
than the errors re s u ltin g from r e la t iv e perturbations in the observation
matrix and right-hand side o f K(m,n)2 \ Here t is the number o f b it s in
the mantissa o f the flo a tin g -p o in t word and K i s a modest function o f m and n
(th e resp ective numbers o f rows and columns in the observation m a trix ).
Sim ilar conclusion can be expected to hold in respect o f methods ( i v ) end
( v ) (V/ilkinson, 1974).
Many o f the numerical methods v/e describe are applicable equally to the
square case (in te rp o la tio n ) and to the rectangular or over-determined case
(le a s t squares). However, there are advantages to be gained in terms o f