Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
7-2006
Placement, visibility and coverage analysis of
dynamic pan/tilt/zoom camera sensor networks
John A. Ruppert
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
.
Recommended Citation
Placement, Visibility and Coverage Analysis of
Dynamic Pan/Tilt/Zoom Camera Sensor Networks
by
John
A.
Ruppert
A Thesis Submitted in Partial Fulfillment of the Requirements for the Degree of
Master of Science in Computer Engineering
Approved By:
Supervised by
Assistant Professor Dr
.
Shanchieh Jay Yang
Department of Computer Engineering
Kate Gleason College of Engineering
Rochester Institute of Technology
Rochester, New York
July
2006
Shanchieh Jay Yang
Dr. Shanchieh Jay Yang
Assistant Professor
Primary Adviser
Andreas Savakis
Dr. Andreas Savakis
Professor and Department Head, Department of Computer Engineering
Chris M. Homan
Dr. Chris Homan
Thesis Release Permission Form
Rochester Institute of Technology
Kate Gleason College of Engineering
Title: Placement, Visibility and Coverage Analysis of Dynamic Pan/Tilt/Zoom
Camera Sensor Networks
I, John A. Ruppert, hereby grant permission to the Wallace Memorial Library reporduce
my thesis in whole or part.
John Ruppert
John A. Ruppert
Dedication
Acknowledgments
I
wouldlike
to
thank
Dr. Shanchieh
Jay
Yang
for his
continued support and encouragementthroughout the
course ofthis
work.I
would alsolike
to thank
Dr.
Andreas Savakis for
inspiring
my interest in
cameranetworking
research andDr.
Chris Homan for
lending
his
Abstract
Multi-camera
vision systemshave important
applicationin
a number offields,
including
robotics and security.
One
interesting
problem relatedto
multi-camera vision systemsis
to
determine
the
effect of camera placement onthe
quality
of service providedby
anetworkof
Pan/Tilt/Zoom
(PTZ)
cameras with respectto
a specificimage processing
application.The
goal ofthis
workis
to
investigate
how
to
place ateam
ofPTZ
cameras,
potentially
used
for
collaborativetasks,
such assurveillance,
and analyzethe
dynamic
coveragethat
can
be
providedby
them.
Computational
Geometry
approachesto
variousformulations
of sensor placement problems have been
shownto
offervery
elegantsolutions;
however,
they
ofteninvolve
unre alistic assumptions about real-worldsensors,
such asinfinite sensing
range andinfinite
rotational speed.Other
solutionsto
camera placementhave
attemptedto
accountfor
the
constraints of real-world computer vision
applications,
but
offersolutionsthat
are approximations
over adiscrete
problem space.A
contributionofthis
workis
an algorithmfor
camera placementthat
leverages Com
Contents
Dedication
inAcknowledgments
iv
Abstract
Introduction
1.1
Related Work
'.
1.1.1
Sensor Networks
1
2
3
1.2
Coverage: Examples from
otherfields
3
1.3
Coverage
in
Sensor Networks
4
1.4
Sensors
withDirectional
Sensing
12
1.5
Time-varying
(Dynamic)
Coverage in Sensor Networks
13
1.6
Camera
Coverage Models
14
1.7
Sensor
Placement
16
1.8
Visibility
17
1.9
Covering
Problems
17
1.10
Camera
Placement
18
1.2
Thesis
Overview
19
2
Dynamic PTZ Camera Coverage Model
21
2.1
Pan/Tilt/Zoom Cameras
21
2.2
Camera Parameters
22
2.2.1
Format Size
22
2.2.2
Effective Pixel Size
23
2.2.3
Focal Length
24
2.2.4
Angle
ofView
25
2.2.5
Field
ofView
(FOV)
25
2.2.7
Spatial Resolution
27
2.3
Application Parameters
27
2.3.1
Object Size
27
2.3.2
Required Pixels
27
2.4
Camera Coverage Parameters
27
2.4.1
Minimum Spatial Resolution
28
2.4.2
Minimum
Application
Distance
28
2.4.3
Maximum
Application
Distance
29
2.5
Static PTZ Camera Coverage Model
29
2.6
Dynamic
PTZ
Camera Coverage Model
31
Camera
Placement
andVisibility
Algorithms
34
3.1
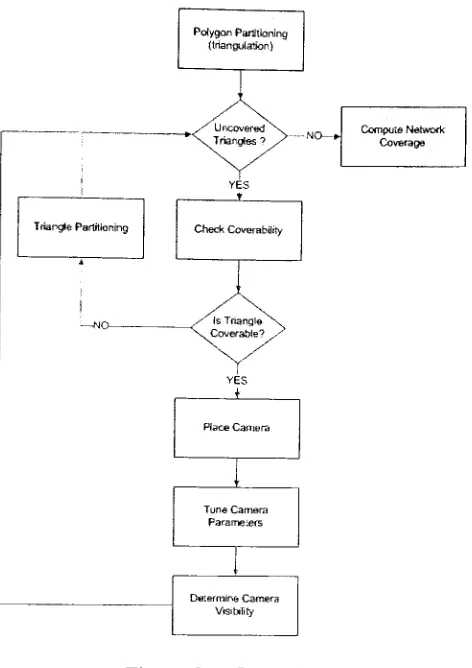
Procedure
34
3.2
Camera Placement
Algorithm
35
3.3
Camera
Visibility
Algorithm
38
3.3.1
Ray Shooting
40
3.3.2
Polygon Intersection
41
3.3.3
Event Points
42
Simulated Environment
andAnalysis
ofDynamic PTZ Camera Coverage
.45
4.1
Simulated
Environment
45
4.1.1
Application
Specifications
45
4.1.2
Camera Specifications
46
4.1.3
Floor
plan47
4. 1
.4Coverage
Metrics
48
4. 1
.5Area Coverage Analysis
49
4.1.6
Implementation
Details
54
4.2
Critical Variables
for Camera Placement
55
4.2.1
Partitioning
55
4.2.2
Adjustable Camera Parameters
58
4.2.3
Restrictions
onCamera Placement
60
4.3
Strategies for Camera Placement
andParameter Adjustments
61
4.3.1
Efficiency
62
4.3.2
Practicality
63
4.3.3
Robustness
65
4.4.1
Angle Bisector
vs.Midpoint
Partitioning
67
4.4.2
MIN
vs.MID
vs.MAX Angle
Partitioning
68
4.4.3
Camera Parameter
Tuning
70
4.4.4
Restrictions
onCamera Placement
70
4.5
Limitations
71
5
Concluding
Remarks
77
5.1
Future Work
79
List
of
Figures
1.1
Observer
placementfor
the
Art
Gallery
Problem
4
1.2
Coverage Behaviors.
E,
G,
andB
represent systemElements,"Good
guy"
to
be
protected,
and"Bad
guys"to
be
engaged,
respectively.The
circlesaround system elementsrepresent
the
effective sensor/effectorengagementradius.
[12]
5
1.3
(a)
pointcoverage,
(b)
areacoverage,
(c)
barrier
coverage[7]
6
1.4
Examples
of0-1
sensor model:(a)
uniformdisks
and(b)
non-uniformdisks.
[15]
6
1.5
r-strip[3]
9
1.6
Sensor Field With Voronoi
Diagram
andMaximal Breach
Path
(MBP).
[18]
10
1.7
Sensor Field With
Delaunay
Triangulation
andMaximal Support
Path
(MSP).
[18]
11
1.8
Plane
target
sonar sensor model.A
planeis
representedby
the
perpendicular
distance
r and orientation a.The
shaded rectangleindicates
a singlesonar sensor
located
atthe
position(xs,ys,
6S
).
[20]
12
1.9
Camera Coverage Model
15
1.10 2D
Covering
(a)
Sample
P
andQ,
(b)
Translated
Q
Covers
P
18
1.11
Illustration
ofthe
reachable regionfrom
a camera(black
disk)
location
onthe
polygon perimeter.[10]
19
1.12 Left:The
polygon.Middle:CeIIular
representationofthe
polygon.Right:The
cell coverage of a camera
O
withFoV
limits OA
andOF
and visiblepoly
gon
OABCDEF. The
dark
cells arethe
visibleonesfrom
camera0.[ 10]
. .20
2.1
Format
Size
[16]
22
2.2
Typical image
sensor sizes(units
in
mm).[16]
23
2.3
CCD
sensor[29]
24
2.4
Focal length
[30]
24
2.6
Field
ofView
andDepth
ofField,
a andj3
arerespectively
azimuth andlatitude
ofthe
Field
ofView,
cis
the
camera,
eg is
the
opticalaxis,
andthe
frustum
defined
by
the
planesabb'a'andedd'e'
is
the
Depth
ofField
.[10]
26
2.7
Minimum
Application Distance (w.r.t. Face
Detection/Recognition)
....28
2.8
(a)
Static
cameracoverage model and(b)
image
sensor parameters30
2.9
Dynamic Camera Coverage Model:
(1)
Static
camera coverage with cameraoriented
toward
pointA,
(2)
Camera
rotates uTdegrees
to
pointin
the
direction
ofB
and(3)
Sweeping
field
of view ofthe
camera(shaded region)
3 1
2.10 Circular Sector
32
2.11
Sweeping
FOV
33
3.1
Procedure
35
3.2
Camera Placement Algorithm
36
3.3
Polygon Triangulation
[31]
37
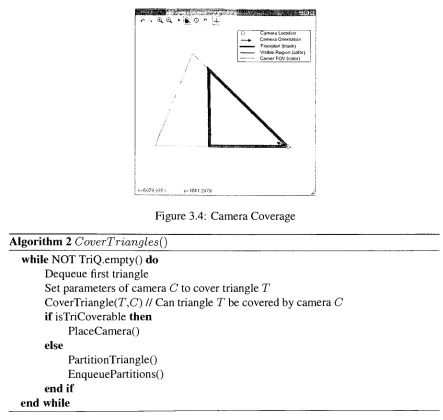
3.4
Camera Coverage
39
3.5
Camera
Visibility
Example
41
3.6
Camera
Visibility
Algorithm:
Intersection
42
3.7
Camera
Visibility
Algorithm: Event Points
43
3.8
Camera
Visibility
Algorithm:
Visibility
Polygon
44
4.1
(1)
Face breadth
and(2)
Face height
[32]
46
4.2
Sony
EVI-D100 Camera Specifications
[28]
47
4.3
Sony
EVI-D100
Pan/Tilt
Range
[28]
48
4.4
(a)
A
typical
floor
plan and(b)
its
polygonapproximations.[10]
48
4.5
Angle
ofView
(H)
vs.Focal Length
(Sony
EVI-D
100)
50
4.6
Coverage Area
vs.Focal Length
(Sony
EVI-D 100
w.r.t.Face
Detection)
. .51
4.7
Circular
sectorarea analysis(R=l)
52
4.8
Dynamic
camera coverage model areaanalysis54
4.9
Types
ofTriangles:
(1)
acute,
(2)
obtuse,
(3)
right and(4)
equiangular ...56
4.10 Triangle Partitioning:
(1)
Angle
Bisector
vs.(2)
Midpoint
57
4.11
Triangle Partitioning:
(1)
MIN
vs.(2)
MID
vs.(3)
MAX
57
4.12 Coverage Utilization
58
4.13
Adjustable
Zoom,
(1)
Maximum
zoom coverage and(2)
Minimum
zoomlevel
coverage59
4.14 Dynamic Camera Coverage: Case
(I)
Minimum
Zoom,
Minimum Pan.
(1)
4.15 Dynamic Camera Coverage: Case
(II)
Minimum
Zoom,
Maximum
Pan.
(1)
Camera Placement
and(2)
K-coverage
61
4.16 Dynamic Camera Coverage: Case
(III)
Maximum
Zoom,
Minimum Pan.
(1)
Camera Placement
and(2)
K-coverage
62
4.17 Dynamic Camera Coverage: Case
(IV)
Maximum
Zoom,
Maximum
Pan.
(1)
Camera Placement
and(2)
K-coverage
63
4.18
Practicality
64
4.19 Real-world Floor Plan Shapes
72
4.20 Effect
ofTriangle
Partitioning
Scheme
onEfficiency
73
4.21
Effect
ofTriangle
Partitioning
Scheme
onPracticality
73
4.22 Effect
ofTriangle
Partitioning
Scheme
onRobustness
74
4.23 Effect
ofCamera Parameter
Tuning
onEfficiency
74
4.24
Effect
ofCamera Parameter
Tuning
onPracticality
75
4.25
Effect
ofCamera Parameter
Tuning
onRobustness
75
4.26 Camera
Placement,
no restrictions76
List
of
Tables
2.1
Typical image
circle sizes[16]
23
4. 1
Face Detection Specifications
47
4.2
Horizontal
Angle
ofView
(Sony
EVI-D
100)
50
4.3
Focal Length
andCorresponding
Coverage
Area
(Sony
EVI-D 100
w.r.tFace
Detection)
52
4.4
Circular Sector Area Analysis
(R=l)
53
4.5
Dynamic
camera coverage model areaanalysis55
4.6
Real-world Floor Plan Shapes
andSizes
66
4.7
Results
from Real-world Floor Plan Shapes
andSizes:
Partitioning
66
4.8
Real-world Floor Plan Shapes
andSizes
67
Chapter
1
Introduction
Recently,
there
has been increased
emphasis on video surveillance researchfor
various purposes, e.g., to
avoidtheft
in
commerce and national security.Video
surveillance systemstypically
consist ofmultiple videocameraswhich are usedto
monitor an environment.Tra
ditional
video surveillance systemshave
been
controlledby
human
operators orhave
usedregular camera rotation schemes
to
observeobjectsmoving
withinthe
field
of view ofthe
cameras.
As networking
andimage processing
researchprogresses,
more advanced systems
arebeing
developed
to
automatethe
process of video surveillance.This
involves
the
development
ofnetworking
policies andimage processing
and computer vision algorithmsto
detect,
locate
andtrack
an objectasit
movesthrough
an environment.An important
concept of multi-camera systemsis measuring
the
quality
of serviceit
provides.
This
couldinclude,
for
example,
how
wella network of camerasensors monitorsan areaor
how effectively it
candetect intruders.
The
focus
ofthis
workis
to
investigate
the
coverage providedby
a network ofPan/Tilt/Zoom
cameras.
A PTZ
camerais
onethat
has
motorized controlfor rotating
the
camerain
alldi
rections as well as
zooming in
on animage. This
work attemptsto
pairup
aset ofPTZ
cameras withan
image processing
applicationto
seethe
effects on coverage ofthe
cameraset when
taking
into
accountthe
constraints of a specific application.The
questionthis
work addressesis:
How
may
one place a network ofPTZ
cameras,
The
key
challengehere is
that
PTZ
camerasmay
adjusttheir pan, tilt
and zoomlevels
over
time
andcooperatein
orderto
improve
networkcoverage.This
workdoes
not attemptto
provide anoptimal solutionto the
problem posedabove,
but
ratherthe
goalis
to
develop
a reasonable approach
to
gaininsight into
the
problem andlearn from
experience.The
results of
this
workinclude:
1.
A study
ofthe
related work2.
Static
anddynamic
modelsfor
camera coverage3.
An
algorithmfor
automated camera placementthat
places camerasin
a roomthat
provides complete coverage of
the
area ofinterest
4. An
algorithmfor
cameravisibility
to
deal
with occlusion of walls withinaroomandto
computethe
overlapping
coverage5.
A
simulatedenvironment and coverage metricsfor
implementing
andtesting
cameracoveragealgorithms
6. Camera
placement and parameter adjustment strategies usedto target
a particularcoveragegoal
1.1
Related
Work
At first
glance ofthe problem,
it is
unclearhow
to
modeldynamic
coveragefor
aPTZ
camera,
notto
mentiongaining insight
onhow
to
placecamerasthat
have dynamic
coverage capabilities.So,
astarting
pointfor
this
research wasto
determine
whatit
meansto
model"coverage".
This
section summarizesthe
related workstudy,
highlights important
concepts1.1.1
Sensor
Networks
The
emergence of sensor networks as a premier researchtopic
is
akey
motivating factor
for
this
work.Sensor
networkshave been
made possibleby
recent advancesin
communications and embedded
micro-sensing
technologies.
A
sensor network consists ofanumberof sensors nodes
that
collaborateto
perform alarger sensing
task
andto
communicatethe
information
to
asink,
or a centrallocation [2]. Sensor
nodes are small electronicdevices
equipped with one or more
sensors,
atransceiver,
storagecomponents,
processing
components and
possibly
an actuator.The
low-cost, low-power,
multi-function capabilitiesof sensor nodes enables unique
features,
such as randomdeployment
and collaborativesensing.
These features
allowfor
a wide range of potential applications andthus
makesensornetworks an
interesting
topic
for
research.Exemplary
applicationsinclude battlefield
surveillance,
forest fire
detection,
smart environments andinventory
control.This
workconsiders a network of
PTZ
camerasensorstargeting
image processing
applications.1.1.2
Coverage: Examples from
other
fields
Coverage
is
animportant
conceptthat
willbe drawn
uponin
this
work.The
term
"cover
age"
typically
refersto
measures ofeffectivenesswhich are usedto
characterizethe
overallperformance of a system.
The
idea
of"coverage"
appears
in
a number ofapplicationsin
various research
fields,
including
the
Art
Gallery
Problem
[24],
satellite oceanmonitoring
[13]
andthe
coordinatedpositioning
of mobile robots[12].
The Art
Gallery
Problem
involves
determining
the
number andlocations
ofobserversneeded
to
monitorthe
interior
of an n-wall artgallery
room suchthat
every
pointin
the
room
is
seenby
atleast
one observer.Using
computationalgeometry,
it has been
shownthat
[f
J
observersis occasionally necessary
and always sufficientto
guard an artgallery
with n vertices
in its
polygonal representation.Quite
often notall ofthe
|_
J
observers areneeded.
For
example,
considerthe two
polygonsin Figure 1.1
each with12
vertices,
onen=
13
[n/3J=4
n=12 Ln/3j= 4Figure 1.1: Observer
placementfor
the
Art
Gallery
Problem.
The
questionthen
becomes: How
can onedetermine
algorithmsfor
minimumguard placement?
Research has
shownthis type
of problemto
be NP-hard [24].
In
[13],
satellites are usedfor
coverage of global oceansto
determine
the
abundanceofphytoplankton.
The
authors ofthis
workdefine
"coverage"
as percentage of
the
oceansurface
that
canbe
monitoredin
a singleday.
A
methodis
presentedto
improve
oceancoverage
by
exploiting redundancy in information from
various missions.This
is done
by
collecting
andmerging information from
satellitesat various orbits.The
concept of"coordinated positioning
and movementin
concert"for
command control
of many-robot systemsis
consideredin
[12].
Here,
"coverage" refersto
maintaining
a spatial
relationship
between
mobile robots with respectto
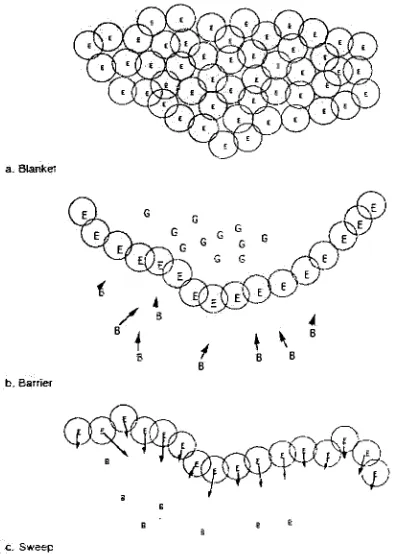
a specific mission goal.The
author
defines
three types
of coverage:(1)
blanket
coverage,
(2)
barrier
coverage and(3)
sweep
coverage.Figure 1.2
illustrates
these
coveragebehaviors.
Blanket
coverage refersto
determining
a staticarrangement of elementsthat
maximizesthe total
amount of area covered.Barrier
coverage alsoinvolves
a static arrangement ofelements,
but
its
goalis
to
minimizethe
probability
that
penetrationthrough the
barrier
willgo undetected.
Lastly,
the
objectiveofsweep
coverageis
to
move agroup
ofelementsacross an area of
interest
taking
into
accountthe trade
offbetween maximizing
the
areacoveredand
minimizing
the
number of misseddetections
perunit area.1.1.3
Coverage in Sensor Networks
Coverage
is
alsoanimportant
conceptin
sensor networksand,
sincethe
applicationsbeing
c.Sweep
Figure 1.2: Coverage Behaviors.
E, G,
andB
represent systemElements,
"Good
guy"to
be
protected,
and"Bad
guys"to
be
engaged,
respectively.The
circles around system elements representthe
effective sensor/effector engagement radius.[12]
great
detail how
coveragehas been defined for
sensor networks.The
coverage problemin
sensor networksis
centered aroundquantifying
the
quality
with which sensors monitor a physical space.
Due
to the
variety
of available sensors andthe
numerous applications of sensornetworks,
many different formulations
ofthe
coverageproblem
have been
proposedby
the
research community.The
most studiedtypes
ofsensornetwork coverage
include
the
following
subjects:(1)
pointcoverage,
(2)
area coverage and(3)
barrier
coverage.Figure 1.3 illustrates
each ofthese
concepts.The
following
section presents sometypical
models usedfor sensing
anddiscusses
in detail
the types
of coverageillustrated in Figure 1.3.
In
addition,
some examples of,--"""o
""'.
o
: O 6
x
^?c~o--pa
v>>
u
'
\
X
'0 ..'-..
O' L'T"
.
?'"';.
o o.on oo
(a) (h) (cl
Figure 1.3:
(a)
pointcoverage,
(b)
areacoverage,
(c)
barrier
coverage[7]
Sensor Models
Many
formulations
ofthe
coverage problem use sensor models as astarting
pointfor
the
definition
ofnetwork coverage.The
mostbasic
sensor model proposedin
the
literature
is
adisk
model wherethe
radius ofthe
disk
representsthe
sensing
range ofthe
sensor[15].
This
type
of model willbe
referredto
asthe
0-1
sensor modelthroughout this
work.Figure
1.4
illustrates
the
0-1
sensor modelfor
sensors withboth
uniformand non-uniformsensing
ranges.
Figure
1.4:
Examples
of0-1
sensor model:(a)
uniformdisks
and(b)
non-uniformdisks.
[15]
More
complex senor modelsthat take
into
accountthe
uncertainty
of sensorsdue
to
that
sensing ability
diminishes
asthe
distance between
a sensor andatarget
increases,
thus
a sensor
is
morelikely
to
detect
an eventhappening
at acloserdistance
as opposedto
adistance further
away.This
willbe
referredto
asthe
probabilistic sensor model.Equation
1.1
is
anexampleofhow
such a sensor modelis formulated
mathematically.S(s,p)
=--^
(1.1)
Here,
d(s,
P)
is
the
Euclidean distance between
the
sensor 5 andthe
pointp,
and positive
constantsA
andK
are sensortechnology-dependent
parameters.Deployment
In
additionto the
sensormodelused,
anotherimportant
considerationfor
analysis of network coverage
is how
sensors aredeployed in
an environment.Two
types
ofdeployment
are
defined in
the
literature:
(1)
deterministic
and(2)
random.Deterministic
coveragerefers
to
coverage providedby
a set of sensor nodesdeployed according
to
a predefinedlayout.
The deployment
canbe
uniform or weightedto
accountfor
areas ofincreased
network
activity,
orhot
spots.Examples
of uniform patternsinclude
repeated geometricpatterns,
such assquare, triangle
andhexagon. In
this case,
coverageanalysis simplifiesto
the
analysis of onebasic
cellbecause
ofthe
symmetric properties ofthe
uniform pattern.As
anexampleof weighteddeterministic
coverage,
considercameracoverageof valuableitems in
a museum.To
ensure protection of more valuableitems,
anincreased
number ofcameras could
be
usedfor monitoring
them.
It is
not alwaysfeasible,
however,
to
place sensorsin
adeterministic fashion. Consider
placing
nodesin
abattlefield
or adisaster
areafor instance. In
such casesit is
important
to
consider randomdeployments. An
example of assumptions madein
the
related workis
Point-based
andArea-based
Coverage
The
objective of point-based coverageis
to
achieve a static arrangement of sensor nodessuch
that
eachpointin
adiscrete
set of points-of-interestis
coveredby
atleast
onesensornode at
any
pointin
time.
Figure 1.3
(a)
illustrates
the
goal of point coverage.The
setof points-of-interest
that
are requiredto
be
covered aredepicted
as squares andthe
sensornodes are
depicted
as circles.The
connectedblack
nodes are active nodes and can adequately
coverthe target
points.A scheduling
algorithmfor
consumption ofenergy based
on
rotating
which nodes are active canbe
usedto
determine
which nodes shouldbe
active atany
giventime
in
orderto
meet coverage requirements.Area
coverageis
an extension of point-based coverage andfocuses
onmonitoring
a particularareaorcontinuous set of pointsin
the
physical world.Figure 1.3
(b)
illustrates
the
area coverage concept.The black
sensor nodes are usedto
representthe
active sensor nodes andthe target
areato
be
coveredis
the
large box. The
active nodes ensurethat
every
point within
the target
areais
covered,
as opposedto
Figure 1.3
(a)
in
which oneis only
concerned withcovering
afew discrete
points.The
analysis of point-based coverageis
also applicableto
area-basedcoverage,
and vice versa.The only
difference
is
the
subjectto
be
covered.Next,
some exampleformulations
for
point-based and area-based coverage of sensor networks withboth
deterministic
and randomdeployments
are presented.These
examples usethe
previously defined 0-1
sensor modelfor
coverage analysis.If
the
placement of sensor nodes canbe
achievedexactly
asplanned, the
coverageproblem essentially
meansplanning
the
placement of nodesto
meetdesired
coverage requirements.
In
this
case,
the
goal of coverage canbe,
for
example,
determining
the
minimumnumber ofsensorsneeded
to
cover a givendiscrete
setofpointssuchthat
every
target
pointis
coveredby
atleast
onesensor,
as consideredby
the
authorsin [3].
formation
is
notknown,
the
algorithmfor maintaining
coverageis
more complex.This is
accomplished
by defining
disjoint
sets of sensor nodes suchthat
every
set ofsensors nodesprovides complete coverage of
the target
points.In
orderto
preserveenergy,
only
one ofthe
setsis
active atany
giventime
andthe
sets are activatesin
a sequential order.The
algorithm aims
to
determine
the
maximumnumber ofdisjoint
sets sothat the time
between
activation ofaparticular sensor
is
thus
also maximized.In
additionto their
pointbased
coverageanalysis,
the
authorsin
[3]
also consider placing
a minimum number of sensor nodesto
coveratarget
area orcontinuous set ofpoints.The
authorsdefine
the
conceptof anr-strip,
or astring
of0-1
sensorsalong
aline
and useit
to
analyze performance ratiosfor bounded
convexregions.This
conceptis illustrated in
Figure 1.5. For
moredetails,
see[3].
Figure 1.5:
r-strip
[3]
An
important
considerationfor
sensor networkdesign
is fault
tolerance.
Sensor
nodesmay fail due
to
lack
ofpower,
physicaldamage
or environmentalinterference,
thus there
is
a needfor
redundancy
oroverlap
ofsensing
areas.Many
different
applications requirevarying degrees
of redundancy.Coverage
analysis provides amethodology in
which redundancy
canbe
quantified.This
idea is
presentedin
terms
of acoverageformulation for
randomareacoverage
in [15]. The
authorsdefine
the term
/c-coverage
to
referto the
coverage
degree
wherek
representsthe
number of sensornodesthat
cover a particular area.The
higher
the
value ofk,
the
more robustthe
networkis
to
sensorfailures
andthus the
morereliable
the
information
that
is
reportedto the
sink.This
conceptis illustrated in Figure
Barrier Coverage
Barrier
coverage refersto
determining
whether or not an eventmay
pass across apath,
or
barrier,
withoutbeing
detected.
This
type
of coveragein depicted in Figure 1.3
(c).
Various
types
ofbarrier-based
coveragehave been
proposed.Here,
two
such examplesarepresented.
In
[18],
the
authors combine an algorithmic approach with computationalgeometry for
analysis ofcoveragein
sensor networks.The
key
ideas developed
arethe
concepts ofworst-case and
best-case
coverage.The
objectives of worst-case coverage areto
find
areasof"lower
observability"
from
sensornodes andto
detect
breach
regions.Best-casecoverage
focuses
onfinding
areas of"high
observability"and
identifying
regions ofbest
support.The
authorsdefine
worst-case coverage asthe
maximalbreach
path(MBP),
orthe
pathin
whichthe
distance between any
point onthe
path andthe
closest senor nodeis
maxi [image:23.540.172.372.375.504.2]mized.
This
scenariois illustrated in
Figure 1.6.
Figure 1.6: Sensor Field With Voronoi
Diagram
andMaximal Breach Path (MBP).
[18]
This
concept exploitsthe
idea
that
sensing
accuracy generally decreases
asdistance
from
asensor nodeincreases
(i.e.,
the
Probabilistic
sensor model).The
maximal support path(MSP),
orbest-case
coverage,
is
the
case wherethe
distance
between
any
point onthe
path andthe
closest sensor nodeis
minimized.The MSP is
illustrated in Figure 1
.7.The
concepts ofbest
and worst-case coveragehighlight
weakFigure
1.7:
Sensor Field With
Delaunay
Triangulation
andMaximal
Support Path
(MSP).
[18]
and protocol
designers for future
node placement or node relocation.Another
modelfor barrier
coverageis
the
exposure-based model.This
concept wasintroduced in
[19]
andis built
uponin [1]. This
model alsoassumesthat
sensing accuracy
diminishes
withincreased
distance,
but additionally
accountsfor
the
amount oftime
asenor
is
exposedto
an event.Depending
onthe type
ofsensor,
anintegral
orderivative
model
may be
usedto
determine
the
intensity
ofthe
exposure.This
intensity
valueis
then
used
to
develop
detection
models.If
the
intensity
over a giventime
interval
exceedssomethreshold,
then the
eventis
detected,
otherwiseit is
not.Analysis
of coverageproceedsin
asimilar
fashion
to
[18]
in
that
it focuses
ondetermining
best-case
and worst-case coveragescenarios.
Best-case
coverageis
the
path of maximal exposure and worst-case coverageis
the
pathof minimal exposure.Many
ofthe
previously
mentionedformulations do
wellatthoroughly
defining
coverage
for
either a specifictype
ofsensoror aspecificapplication;
however,
there
has
notbeen
much
focus
placed onaccounting for
variationsin
types
of sensorsand networkoperation.Part
ofthe
contribution ofthis
workis
to
provideageneralframework for
coverage analysisof a network of
Pan/Tilt/Zoom
cameras whichtakes
into
account variationsin
the
factors
that
affect network coverage and condenses camera coverageinto
metricsthat
canbe
usedfor
comparison ofnetworks ofcameras withvarious parameter settings and various modes1.1.4
Sensors
with
Directional
Sensing
Most
ofthe
previously
mentioned coverageformulations
assume omni-directionalsensing
capabilities;
however,
there
aremany
types
of sensorsthat
arelimited
to
directional
sensing.For example,
consider sonar and camera sensorswheresensing is limited
to
anangle orfield
of view.
In
this
caseit is important
to
consider orientation ofthe
sensors whendesigning
algorithms and placement strategies.
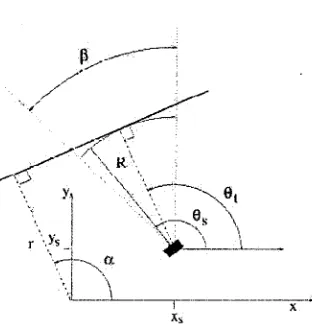
Figure 1.8 illustrates
one example of a physics-based [image:25.540.192.348.228.390.2]directional
model of a sonar sensor.Figure 1.8: Plane
target
sonarsensor model.A
planeis
representedby
the
perpendiculardistance
r and orientation a.The
shaded rectangleindicates
a single sonar sensorlocated
at
the
position(xs,
ys,0s)-[20]
A
major contribution ofthis
work willbe development
of adirectional sensing
modelfor
the
analysisofcoveragewhenusing
camerasfor
sensing.Typically,
related workshave
modeleda sensor's
sensing
rangeas adisk,
wherethe
radius ofthe
disk is
the
sensing
range.This
assumesthat there
is
nodirection
associated with sensor'ssensing
capabilities.In
the
case of a
camera,
sensing
rangeis
limited
by
the
field
of view andtherefore
has
adirection
associated with
it. This
work attemptsto
incorporate directional sensing into
analysis of1.1.5
Time-varying
(Dynamic)
Coverage in Sensor Networks
While
coverage ofimmobile
sensors with omni-directionalsensing
capabilitieshas been
extensively
explored andis relatively
wellunderstood,
only recently have
researchers moreextensively
exploredthe
idea
oftime-varying
ordynamic
coverage[5]. This
type
of network operation
may be desirable in
the
case ofhaving
alimited
numberof sensornodes,
or when
it is
notrequiredto
coverevery
point ofthe
area ofinterest
simultaneously.In
the
caseoftime-varying
coverage, the
sensing
area of a sensor node changes overtime.
As
aresult,
pointsthat
wereoriginally
uncoveredmay
alternatebetween
being
covered and not
being
covered andthus
a greater amount ofarea willbe
covered overtime.
This
bring
aboutthe
following
questionsto
be
answered[5]:
What is
the
area coverage at a giventime
instant?
What
is
the
area coverage over atime
interval?
What
arethe
durations
oftime that
alocation
is
covered and not covered?Additionally,
for
static coverage of a sensornetwork,
anintruder
that
is
notinitially
detected
will neverbe detected if it
remainsstationary
or movesalong
an uncovered path.Detection
ofthe
intruder is
morelikely
to
occurif
sensorscan search an area.This
conceptbrings
aboutthe
following
important
questionsto
be
answeredby
this
work:How quickly
can a network ofPTZ
camerasdetect
anintruder?
How does
the
detection
time
depend
onthe
searching strategy
ofthe
cameras?Can
onederive
camera-parameteradjustment strategiesto
improve intrusion detec
tion
capabilities?In
[5],
the
authors showthat
mobility
canbe
usedto
offset alack
of sensorsin
orderto
improve
network coverage.This
work will attemptto
useadjustment of camerainstead
of1.1.6
Camera Coverage
Models
An
additional contribution ofthis
work willbe
the
development
of a modelfor
coverageofa
PTZ
camera withrespectto
image processing
application.Camera
models are usedto
characterize
the
viewof a camerausing intrinsic
and extrinsic camera parameters[17]. In
trinsic
camera parametersspecify internal
camera characteristics andinclude focal
length,
principal point and effective pixel size.
Extrinsic
parametersdescribe
the
spatial relationship between
the
camera andthe
world.Exemplary
extrinsic parameters arethe
rotationmatrixand
translation
vector.The
inputs
to
a camera model aretypically
defined
using
cameraparameters andthe
outputs represent
the
relationship between
a pointin
the
world referenceframe
andits im
age projection.
One
suchexampleis
the
pinhole camera model[17].
Here,
the
relationship
between
a3D
pointM
andits image
projection mis
givenby
the
formula:
m =
A[Rt]M,
(1.2)
where
A is
the
cameraintrinsic
matrix,
R is
the
rotation matrix andt
is
the translation
vector.
The
matrixA
canbe
expressed as:A
(
\
1
X0
cx
^
0
Jy
cy
0
0
1
)
(1.3)
where
(cx,
cy)
are coordinates ofthe
principalpoint,
(fx,
fy)
arethe
focal lengths
by
the
axesx and
y
andthe
matrixR
and vectort
canbe
expressedas:m
ri2
ru
R
'tl\
,t
=t2
\h
J
(1.4)
7~21
r22
T23
\
r3i
r32
r33
j
Other
camera modelshave been developed
to
determine
the
degree
ofuncertainty
in
measurements obtained
from
acamera sensor.In [1
1],
the
authordevelops
acameramodelto "gain
adegree
of confirmation orrejection"
based solely
on visualinformation. This is
accomplishedby
extracting
roomfeatures from
the
cameraimage
andcomparing
them
withfeatures
extractedfrom
apre-developed worldmodel.
Similar
to the
pinhole cameramodel,
the
modelin
[11]
uses camera parameters asinputs,
namely
a cameraimage,
the
robot'shypothesis
ofits
current position andthe
actualposition of
the
robot.Unlike
the
pinhole cameramodel,
however,
the
output ofthis
modelis
the
probability
that the
robot'shypothesis is
correct.This
canbe
thought
ofas aquality
ofservice measurement.
For
this work, the
goal ofthe
camera modelis
to
characterizethe
coverage of aPTZ
camera
in
the two-dimensional
worldusing
the
focal length
and pan parameters ofthe
camera as
inputs. The
pan parameter willdefine
the
orientation ofthe
camera relativeto
some reference
frame,
similarto the
0
or a parameterillustrated in
the
sonar modelin
Figure 1.8. The
focal length
parameter setsthe
zoomlevel
ofthe camera, thus
a practicallimit
is imposed
onthe
view rangeby
the
finite
spatial resolutionofthe
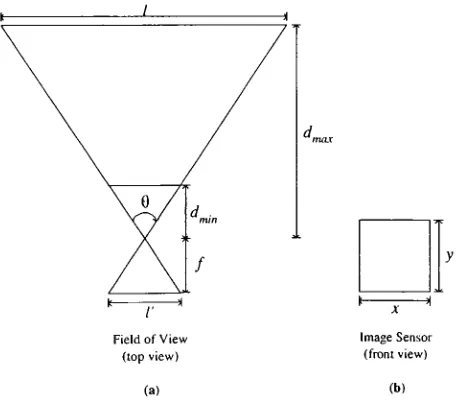
camera.Figure 1.9
illustrates
apossible modelfor
the
field
ofviewof a camera with alimited
view range.ImageSensor (frontview)
[image:28.540.157.385.382.582.2](a) (b)
Figure 1.9:
Camera Coverage Model
This
workfocuses
on coveragein
two
different
aspects,
namely
area coverage andHow
can one model area coveragefor
aPTZ
camera?What is
the
criteriafor detection
ofanintruder
(stationary
or mobile)?How
can onemodeldetection
time
ofanintruder?
A study
ofthe
related workrevealsthe
following
areasin
which proposed camera models
may be improved
upon:Unrealistic Assumptions:
Computational
Geometry
models,
such asthose
presented
in
[24],
make assumptions aboutthe
view of a camerathat
do
notapply
to
real-world
cameras, e.g.,
infinite depth
offield
andinfinite
rotational speed.This
work
focuses
ondefining
the
real-world constraintsfor modeling
camera coveragefor
a more practicaland realizable approach.Off-line
vs.On-line Placement
ofCameras:
Many
active vision workshave
considered cameraplacement
for
on-lineactivity,
but
to
ourknowledge,
little
workhas
been done
onthe
off-lineplacement of cameras priorto
performing
the
active visiontask.
Task-specific
constraints:Camera quality
of servicerequirementsvary for different
tasks,
thus
there
is
a needfor
a generic camera modelthat
incorporates
the
idea
oftask-specific parameters,
such asthe
minimumacceptable spatial resolution.1.1.7
Sensor
Placement
For
multi-cameravisionsystems,
asthe
size ofanetworkincreases,
it quickly becomes im
practical
for
networkdesigners
to
considerplacing
camerasby
hand.
Thus,
it is important
to
consider algorithmfor
automated placement ofcameras.Related
works,
such as[10]
and
[23],
have
addressedthe
problem ofattempting
to
minimizethe
number of camerasWhen
considering
real-world visionapplications,
it is important
to
considerthe
constraints
that
limit
the
coverageability
ofa network of cameras.For
example,
[10]
intro
duces
the
idea
ofconstraining
camera placementbased
ontask-specific
andfloor
plan-specific coverage requirements.
In
[23],
the
authorsconsiderthe
placementof static cameras
(sensors)
in
adynamic
scene.A
contributionofthis
workis
to
build
upon related work and considerthe
placementofdynamic
camerasin
astatic scenewhilealsoconsidering
constraints specificto
aparticularfloor
plan orimage processing
application.1.1.8
Visibility
Another
important
real-world considerationthat
needsto
be
taken
into
account when considering
the
coverageability
of multi-camera networksis
constraintsimposed
by
the
presenceof obstacles within
the
region ofinterest. This
couldinclude,
for
example,
poles orwalls within a
building
or an objectmoving in front
of a camera andoccluding its field
ofview.
Analyzing
visibility becomes
increasingly
important
whenconsidering
sensorsthat
canvary
their
sensing
area overtime
and scenesthat
change overtime.
[23]
considersthe
effects on
visibility
of static cameras as a scene changes overtime.
This
work considersthe
visibility
of staticanddynamic
camera coverage models with respectto
static scenes.1.1.9
Covering
Problems
Covering
problems aimto
find
placements ofa network of sensors sothat, together,
they
coveracollection of
target
regions[9].
For
example,
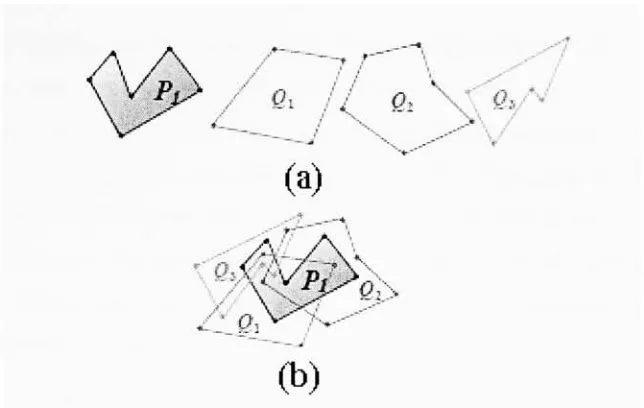
[8]
considers2D covering
polygonswhere
the
goalis
to
decide
if
asetofcovering
polygons canbe
translated to
coveratarget
set.
If
the
answeris"yes",
then the
polygons are rotated and placed.This is
illustrated
in
~
\VpJ>
/
o,
//
XX--V
\(a)
[image:31.541.109.431.60.264.2](b)
Figure 1.10: 2D
Covering
(a)
Sample P
andQ,
(b)
Translated
Q
Covers
P
This
workattemptsto
draw
uponthis
conceptby
using
cameras,
representedastriangu
lar
regions, to
cover a polygon representation of afloor
plan.The
polygonis decomposed
into
triangular
regions andthe
questionbecomes,
given camera and applicationconstraints,
can one place acamera and adjust
its
parameterssuchthat the
camera coversthe triangle?
If
the
answeris
"yes",
then the
camerais
placedandthe
parameters are adjusted.Another important
piece ofinformation learned
from
the
study
ofcovering
problemsis
that
anumberof2D covering
problemshave been
provedto
be NP-complete [9]. This
gives an
idea
ofthe
complexity
ofthe
problembeing
dealt
with andis
additional supportfor
aheuristic
approach.1.1.10
Camera
Placement
Other
related workshave
studiedthe
problem of camera placement andhave
proposedsolutions.
[10]
considersamore realistic modelfor
acamerathan those
proposedin Com
putational
Geometry
works such as[24]. In
addition, the
authorsin
[10]
propose methodsfor
incorporating
task-specific
constraintsinto
amodelfor
camera coverage.The
problemis
posed as adiscrete
optimization problem wherethe
goalis
to
minimizethe
cost of placdeveloped
in
[10]
that
willbe drawn
uponin
this
thesis
include
the
formulation
of a modelfor dynamic
camera coverageandconceptofvisibility.The
authors presentamethod ofdeveloping
amodelfor dynamic
camera coveragethat
involves
the
introduction
of atask-specific
time
constraint.This
representsthe
minimumamount of
time
requiredfor
anobjectto
be
withinthe
visiblefield
of view of atleast
onecamera
in
the
system.By determining
the
sweeping
angle of view of acamera overtime,
the
field
ofview ofthe
cameracanthen
be
approximatedby
atriangular
region.Figure
1.11
illustrates
this
concept.Figure 1.11: Illustration
ofthe
reachable regionfrom
a camera(black
disk)
location
onthe
polygon perimeter.
[10]
This
work attemptsto
simplify
this
dynamic
camera coverage model evenfurther
by
only considering
a partial range of motioninstead
ofconsidering sweeping
the
cameraover
the
entire range of motion.Additionally,
the
authorsin
[10]
present a methodfor
dealing
with occlusion of objects,
ordetermining
the
"visibility" of a camera.To do this,
an anglesweep
technique
is
presented.While
this
workheavily
leverages
this
concept,
the
implementation is vastly
different
in
that
[10]
worksin
the
discrete
space,
whilethis
work attemptsto
workin
the
continuous space.
Figure 1.12 illustrates
the
concept ofpolygonvisibility
overadiscrete
problem space.
1.2
Thesis Overview
This
thesis
presentsan approachto the
cameraplacementproblemthat
involves
determin
I
i
H
car:::::
j
It %
t
I
t f
o
Figure 1.12:
Left:The
polygon.Middle:Cellular
representationofthe
polygon.Right:The
cell coverage ofa camera
O
withFoV limits OA
andOF
and visible polygonOABCDEF.
The dark
cells arethe
visibleonesfrom
cameraO.[10]
different
shapesoftriangles
(representing
the
field
of view ofthe
cameras)
that
covera2D
room and
analyzing
the
cameraplacement algorithm via simulationsto
gaininsights
asto
Chapter
2
Dynamic
PTZ
Camera
Coverage Model
In
orderto
makethe
problem moremanageable, the
constraints ofthe
problem canbe
relaxed
to
only
considertwo-dimensions.
Thus,
the tilt
aspectofaPTZ
camerais ignored.
Based
onthe
study
ofthe
relatedworkandthis simplification,
it
seemsthat
areasonable,
yet simple enough approach
is
to
modelthe
dynamic
coverage of eachPTZ
camera as atriangle
that
representsthe
field
of view ofthe camera,
and placedifferent
shapes andsizesof
triangles to
cover a2-D
room.The
approachis
to
first
develop
a modelfor
static cameracoverage,
andthen
extendthe
model
to
incorporate dynamic
coverage constraints.The
goalis
to
representthe
sweeping
field
ofview of a camerain
the
shape of atriangle.
This
then
givesusthe
ability
to
analyzea given camera placement
algorithm,
in
terms
ofthe
efficiency, robustness,
andpracticality
of
the
coverage providedby
the
network ofPTZ
cameras.This
section outlines proposed modelfor dynamic
camera coverage.Here,
considerthe
2D
areathat
canbe
coveredby
a camera with respectto
aparticularimage processing
application.
For
completeness,
someimportant
terms
andcamera parametersareoutlined.2.1
Pan/Tilt/Zoom
Cameras
Various
types
ofcameras are availablefor
video surveillancetasks.
This
workfocuses
onDigital
camera:A digital
camera uses an electronic sensorto
acquire spatial variations
in light
intensity
andthen
appliesimage
processing
algorithmsto
the
data
provided
by
the
sensorto
reconstructapictureof a scene[4]. Two
technologies
currently
usedto
manufacturedigital image
sensors areCharge Coupled Device
(CCD)
and
Complementary
Metal Oxide Semiconductor
(CMOS). Both
CCD
andCMOS
perform
the task
ofconverting light energy into
electric chargeto
captureinforma
tion
about a scene.Image
sensors canbe
thought
ofas a2-D array
ofthousands
ormillions of
tiny
solarcellsthat
eachtransform
light
from
one small part of animage
into
electrons.Pan/Tilt/Zoom
(PTZ)
camera:A
Pan/Tilt/Zoom
camerais
a specialtype
of camerathat
has
motorizedcontrolfor rotating
the
camerain
alldirections
andzooming in
onan
image.
2.2
Camera Parameters
Next,
someimportant
camera parameters aredefined.
2.2.1
Format
Size
An
ideal lens
producesimages in
the
form
of acircle,
calledthe
image
circle.Digital
cameras use a rectangular
image
sensorto
capture a scenethrough
alens.
Figure 2.1
illustrates
the
concept offormat
size.ImageCirclev
(mageSize
Vertical
Horizontal
The
ratio ofhorizontal length
to
verticallength
ofthe
image
sensoris known
asthe
aspect ratioof
the
camera.A
typical
aspect ratiois 4:3 (H:
V)
for
a standarddigital
camera.Table 2. 1 displays
examples ofcommonimage
circle sizesalong
withthe
corresponding
horizontal
and verticallengths.
Image Circle
Horizontal
Vertical
04.0mm
3.2mm
2.4mm
06.0mm
4.8
mm3.6mm
08.0mm
6.4mm
4.8mm
011.0mm
8.8mm
6.6mm
016.0mm
12.8mm
9.6mm
Table 2.1: Typical image
circle sizes[16]
Lenses
aredesigned
to
work with specificimage
sensor sizes.Different
image
sensorsizeswill yield
different
fields
of viewusing
the
samefocal length. Common image
sensorsizes
include
1/4", 1/3", 1/2",
2/3"and1". Figure 2.2
illustrates
sometypical
image
sensorsizes and
the
corresponding
horizontal,
vertical anddiagonal
lengths.
1/4"
HI2.4
3.2 1/3--43-'1/r
?* .Sfit ,8II
4.6 [image:36.540.189.356.389.524.2]6.4 2/3" ,,s
m
6.6 X"6m
9.6 8.8 12.8Figure 2.2: Typical image
sensor sizes(units
in
mm).[16]
2.2.2
Effective Pixel Size
Most image
acquisition unitstoday
utilizeCCD
technology.Compared
to
picturetubes,
CCD devices have relatively lower
production costs andhave
the
advantage ofbeing
comtwo-dimensional,
spatially discrete
image. Figure 2.3 illustrates
the
2-D array
nature ofaCCD
sensor.CCD. chip
Figure 2.3: CCD
sensor[29]
An
important
parameterofCCD
chipsis
resolution,
whichis
expressed asthe
numberof pixel elements.
A CCD chip
typically
has
afew
rows and columnsof"blind"
pixelsat
its
edges,
thus the
areaofthe
chip
usedfor image
acquisitionis known
asthe
effective pixelsize of
the
chip.An
example of a modernhigh
resolutionCCD chip is
onethat
contains756
pixelsin
the
horizontal direction
and58 1
pixelsin
the
verticaldirection.
2.2.3
Focal Length
For
athin
double
convexlens,
raysfrom
aninfinite light
source will converge ata singlepoint,
calledthe
focal
point.The distance between
the
lens
andthe
focal
pointis known
asthe
focal length
f. To optimally
capture ascene ataninfinite distance
to
animage
sensor,
the
distance between
the
lens
andthe
sensoris
setto the
focal
length,
i.e.,
the
sensor shouldlie
onthe
focal
plane.This
is illustrated in Figure 2.4 (a).
point oflight
(a)
<M
2.2.4
Angle
of
View
The
angleof
view correspondsto the
amount of a given scenethat
appears on a sensor.Angle
ofviewcanbe
measuredhorizontally,
vertically
ordiagonally.
For digital
cameras,
angle of view
is
afunction
offocal length
andthe
size ofthe
image
sensor[16]. This
is
illustrated in Figure 2.5.
8}
;
/
\ /
>
/-CCDchip
/'
Figure 2.5: Angle
ofView
The formula for
angle ofview,
using
the
ideal lens
model,
is
representedin Equation
2.5.
9
=2
arctan(
yh(2.1)
Here,
9
is
the
angleofview,
/
is
the
focal
length
ofthe camera,
andV
is
adimension
ofthe
CCD chip
(horizontal,
vertical ordiagonal).
See Figure 2.2 for
moredetails..
With
afixed image
sensorsize, there
is
aninverse,
non-linearrelationship between
the
focal length
andthe
angleof view.2.2.5
Field
of
View
(FOV)
The
volumetric region visiblefrom
a camerais defined
asits field
of
view[10].
This is
determined
by
the
apex angles ofthe
pyramidalregionoriginating from
the
lens
center ofx^\
l
\
;- -,/\
!
"7bh
\
'j
/
Figure 2.6: Field
ofView
andDepth
ofField,
aand/?
arerespectively
azimuthandlatitude
of
the
Field
ofView,
cis
the camera,
eg is
the
opticalaxis,
andthe
frustum defined
by
the
planes
abb'a'
andedd'e'
is
the
Depth
ofField
.[10]
2.2.6
Depth
of
Field
(DOF)
The
depth
of
field
ofa camerais
the
distance between
the
nearest andfarthest
objectsthat
appear
in acceptably sharp focus in
animage [10]. This
conceptis illustrated in Figure 2.6
as
the
frustum defined
by
the
planes abde and a'b'd'e'.Further
decomposing
DOF
into
two
components:Minimum
Object Distance: The distance between
a camera andthe
nearest objectthat
appearsin acceptably sharp focus is defined
asthe
minimum objectdistance.
This is dependent
uponthe
camera'sfocal length. The
greaterthe
focal
length,
the
greater
the
minimumobjectdistance.
Maximum Object Distance: The distance between
the
camera andthe
farthest
object
that
appearsin acceptably sharp focus defines
the
maximum objectdistance.
This
parameteris
dependent
upon task-specificconstraints,
whichmay be
spatial,
temporal
orbased
onquality
of service.For
example,
considerthe
image
processing
applicationofhuman face
detection.
In
this case, the
maximum objectdistance
would
be limited
by
a minimumacceptablespatial resolutionofface
images
required2.2.7
Spatial
Resolution
Spatial Resolution is
a measure ofaccuracy
ordetail
ofadigital image. As
anexample,
for
adigital
image,
this
could meanthe
ratiobetween
the total
numberof pixels neededto
representan object
in
animage
andthe
size ofthe
objectin
the
realworld.The
higher
the
spatial
resolution,
the
moredetailed
and sharper animage
willbe.
2.3
Application
Parameters
Because
this
workconsidersthe
coverageof acamerawith respectto
animage-processing
application,
here
some application-specific parameters aredefined.
2.3.1
Object Size
This defines
the
sizeofthe target
objectto
be
covered.2.3.2
Required Pixels
This is
an application-specific constraintthat
defines
the
minimum pixelresolutionrequiredfor
a particularimage-processing
algorithm.2.4
Camera
Coverage Parameters
For
this work, the
problemformulation
is limited
to two-dimensional
regionsin
orderto
make
the
problemmoremanageable.The
camera coveragemodelis defined in
terms
ofin
putsand outputs.
The
idea
is
to
convertthe
cameraparameters andtask-specific
constraintsof
the
probleminto
a spatial coverage representation.In
orderto
do
this,
some additional2.4.1
Minimum Spatial Resolution
The
minimum spatial resolutionparameter,
rs,
refersto
an application-specificlimit
onthe
acceptable resolution of capturedimages.
In
this
case,
consider applications such asface detection
andface
recognition.
![Figure 1.6: Sensor Field With Voronoi Diagram and Maximal Breach Path (MBP). [18]](https://thumb-us.123doks.com/thumbv2/123dok_us/120663.11617/23.540.172.372.375.504/figure-sensor-field-voronoi-diagram-maximal-breach-path.webp)
![Figure 2.2: Typical image sensor sizes (units in mm). [16]](https://thumb-us.123doks.com/thumbv2/123dok_us/120663.11617/36.540.189.356.389.524/figure-typical-image-sensor-sizes-units-mm.webp)