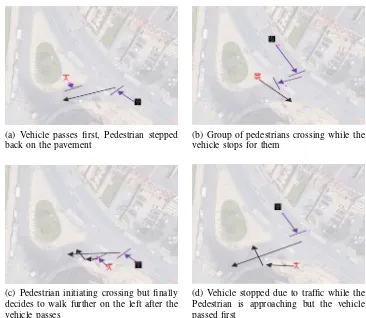
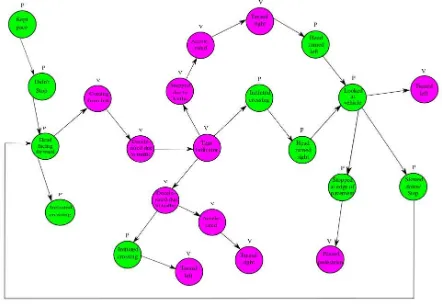
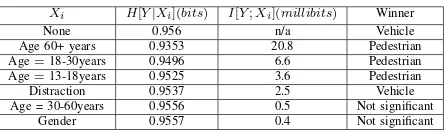
Predicting pedestrian road-crossing assertiveness for autonomous vehicle control
Full text
Figure


Related documents
(2011, 633), data literacy implies “under- standing what data mean, including how to read graphs and charts appropriately, draw correct conclusions from data, and recognize when
The GCA Novice Award may be given at a GCA Flower Show in the Horticulture, Photography and Botanical Arts to an exhibitor who is a member of a GCA club and who has never won
To address these shortcomings, we have designed the Waterloo SPARQL Diversity Test Suite (WatDiv) that offers stress testing tools to re- veal a much wider range of problems with
In this paper, the result of a comparative study of the web accessibility of official websites from countries of the European Union is presented.. The aim
After the AT868 has been completely installed and wired, reconnect line power and proceed to Chapter 2, Programming Site Data , to program the meter for taking flow
FIVE STAR FOUNDATION SYSTEM 5 consists of FIVE STAR STRUCTURAL CONCRETE ES concrete repair material capped with FIVE STAR RAPID EPOXY GROUT, a NONSHRINK
I understand and agree that student progress is an expected part of the TXVA program in addition to the hours logged, and that my student is expected to complete the work of one
As mentioned above, we illustrate SAMTools analysis functionalities by running three analysis methods on Mondex HLPN model, simulation, explicit state model checking and bounded
