GURAM BEZHANISHVILI, NICK BEZHANISHVILI, JULIA ILIN
Abstract. We develop the theory of stable modal logics, a class of modal logics introduced in [3]. We give several new characterizations of stable modal logics, and show that there are continuum many such. Since some basic modal systems such asK4andS4are not stable, for a modal logicL, we introduce the concept of anL-stable extension ofL. We prove that there are continuum many S4-stable modal logics, and continuum manyK4-stable modal logics betweenK4and S4. We axiomatizeK4-stable andS4-stable modal logics by means of stable canonical formulas of [3], and discuss the connection betweenS4-stable modal logics and stable superintuitionistic logics of [2]. We conclude the paper with examples ofK4-stable modal logics, and compare K4-stable modal logics to subframe and splitting transitive modal logics.
1. Introduction
Stable multi-conclusion consequence relations and stable modal logics were introduced in [3]. The defining feature of these systems is that they admit filtration and hence have the finite model property. As was shown in [3], these systems can be axiomatized by stable rules. It is the goal of this article to develop further the theory of stable modal systems. We will obtain several new characterizations of stable modal systems, and will show that there are continuum many such systems. We will also show that some basic modal logics such as K4 and S4 are not stable. Because of this, for a modal system S, we will introduce the concept of a S-stable extension of
S. We will mostly concentrate on K4-stable and S4-stable logics, for which we obtain several useful characterizations. We will also show that there are continuum manyS4-stable logics, and continuum manyK4-stable logics betweenK4andS4. We conclude the paper with many examples ofK4-stable modal logics, and compare the class of K4-stable modal logics to those of subframe and splitting transitive modal logics.
The paper is organized as follows. In the next two sections we recall the definitions of stable consequence relations and stable modal logics from [3] and provide new characterizations of these. We also show that there are continuum many such systems. It turns out that many standard modal logics are not stable. This suggests to relativize the concept of stability to that of L -stability, whereLis some normal modal logic. This is discussed in Section 4. In Section 5 we study
K4-stable andS4-stable logics. These are special instances of L-stable logics. We obtain several useful characterizations ofK4-stable andS4-stable logics, and show that they can be axiomatized by stable formulas. In Section 6 we discuss the connection between S4-stable logics and stable superintuitionistic logics of [2]. We show that the superintuitionistic fragment of anS4-stable logic is stable, and that the least modal companion of a stable superintuionistic logic isS4-stable. We also show that there are continuum many S4-stable logics and continuum manyK4-stable logics in betweenK4andS4. In the final section we present many examples (and non-examples) ofK4 -stable andS4-stable logics, provide their axiomatizations in terms of stable formulas, and compare them to subframe and splitting logics.
2010Mathematics Subject Classification. 03B45, 03B55.
Key words and phrases. Modal logic, modal consequence relation, canonical formula, canonical rule, intuitionistic logic.
2. Stable consequence relations
We will assume the reader’s familiarity with modal logic. We will use [9, 11, 6, 17] as our main references for the basic theory of normal modal logics, [7] for universal algebra, [14, 12] for modal consequence relations, and [10, 3] for multi-conclusion modal consequence relations. We will use the same notation as in [3]. We will freely use the duality between modal algebras and modal spaces (descriptive frames). In fact, we will often do not distinguish between modal algebras and their duals.
Definition 2.1.
(1) Let A= (A,⌃)andB= (B,⌃)be modal algebras. A Boolean homomorphism h:A!B is
stable provided⌃h(a)h(⌃a) for alla2A.
(2) We call A a stable subalgebra of B if A is a Boolean subalgebra of B and the inclusion A,!B is a stable embedding.
(3) A class K of modal algebras is stable provided for modal algebrasAandB, if B2K and there is a stable embedding A⇢B, thenA2K.
Definition 2.2.
(1) Let X = (X, R) and Y = (Y, R) be modal spaces. A map f : X ! Y is stable if it is continuous and xRy impliesf(x)Rf(y).
(2) A classK of modal spaces is stableprovided for modal spaces XandY, ifX2Kand there is an onto stable mapf :X⇣Y, thenY2K.
By [3, Lem. 3.3], h:A!Bis stable i↵its dualh⇤:B⇤!A⇤ is stable. Consequently, a class Kof modal algebras is stable i↵its dual classK⇤ of modal spaces is stable.
Definition 2.3. A normal modal multi-conclusion consequence relation S is stable provided the corresponding universal classU(S) :={A|A|=S}of modal algebras is stable.
Stable multi-conclusion consequence relations can be axiomatized as follows. LetA= (A,⌃) be a finite modal algebra. For everya2A, letpabe a propositional letter. Thestable (multi-conclusion)
rule⇢(A) is defined as / , where
={pa_b$pa_pb|a, b2A}[
{p¬a$¬pa|a2A}[
{⌃pa!p⌃a|a2A} and
={pa|a2A, a6= 1}.
By [3, Thm. 7.4], S is stable i↵ S is axiomatizable by stable rules, and by [3, Thm. 7.8], every stable multi-conclusion consequence relation has the finite model property. We next give a con-venient characterization of stable multi-conclusion consequence relations. We recall (see, e.g., [7, Thm. V.2.20]) that a universal classU is generated by a classK i↵U =ISPU(K), whereI,S, and
PU are the operations of taking isomorphic copies, subalgebras, and ultraproducts. Note that in generalISPU(K) di↵ers from the variety generated byK.
Theorem 2.4. LetS be a normal multi-conclusion consequence relation. The following are equiv-alent.
(1) S is stable.
(2) U(S)is generated by a stable class of modal algebras.
(3) U(S)is generated by a stable class of finite modal algebras.
algebras not belonging toK. We claim thatS is axiomatizable by the stable rules{⇢(A)|A2A}. First we show that each member ofK satisfies⇢(A) for eachA2A. Indeed, if there areB 2K
andA2Asuch thatB6|=⇢(A), then by [3, Prop. 7.1], there is a stable embeddingA⇢B. Since
Kis stable,A2K, a contradiction. BecauseU(S) is generated byK, it follows that each member ofU(S) satisfies ⇢(A) for each A2A. Conversely, suppose that B satisfies⇢(A) for eachA2A. IfB62U(S), then there is a multi-conclusion rule / such that S ` / but B6|= / . By [3, Thm. 7.8], there is a finite stable subalgebra B0 ofB such that B0 6|= / . Since B0 is a stable subalgebra ofB, by [3, Prop. 7.1], B 6|=⇢(B0). As B satisfies ⇢(A) for eachA2 A, we see that B0 2 K, so B0 2 U(S). But this contradicts to B0 6|= / . Therefore, B 2 U(S), and so S is axiomatizable by the stable rules{⇢(A)|A2A}. Thus,S is stable by [3, Thm. 7.4].
Finally, for the implication (1) ) (3), supposeS is stable. By [3, Thm. 7.8], S has the finite model property, soU(S) is generated by the classK of its finite members. SinceS is stable,U(S) is stable by [3, Thm. 7.4]. Thus,K is stable, completing the proof. ⇤
Remark 2.5. From next section on we will be mostly concerned with stable modal logics. But all the results we obtain have obvious analogues for multi-conclusion modal consequence relations, which often have even easier proofs. Because of this, we will often not discuss these analogues explicitly.
3. Stable modal logics
Stable modal logics were introduced in [3]. They can be defined as those normal modal logicsL whose corresponding varietyV(L) is generated by a stable universal class. By [3, Thm. 7.8], stable modal logics have the finite modal property. The next theorem is an analogue of Theorem 2.4 and provides a convenient characterization of stable modal logics.
We recall that an element a of a modal algebra Ais anopremum ifa6= 1 and for each b 6= 1 there is n2! with ⌅na c, where ⇤0a=a, ⇤n+1a =⇤⇤na, and ⌅na =Vkn⇤ka. A modal algebraAis subdirectly irreducible i↵it has an opremum.
An elementx of a modal space X= (X, R) is a root ifX = R![x] and a topo-root ifR![x] is
dense inX, where R0[x] ={x},Rn+1[x] =R[Rn[x]], andR![x] =S
n2!Rn[x]. We callXrooted if
it has a root, andtopo-rooted if the set of topo-roots is not co-dense (the interior is nonempty). By [16, Thm. 2], a modal algebraAis subdirectly irreducible i↵its dual modal spaceA⇤is topo-rooted. Therefore, ifAis finite, thenAis subdirectly irreducible i↵A⇤is rooted [15, Thm. 3.1]. Since the topology on a finite modal spaces is discrete, we will identify finite modal spaces with finite Kripke frames.
Theorem 3.1. Let L be a normal modal logic. The following are equivalent.
(1) L is stable.
(2) V(L)is generated by a stable class of modal algebras.
(3) V(L)is generated by a stable class of finite modal algebras.
(4) V(L)is generated by a stable class of finite subdirectly irreducible modal algebras.
Proof. The implications (4))(3))(2) are trivial. For the implication (2))(1), suppose that
V(L) is generated by a stable class K. By Theorem 2.4, the universal class U(K) generated byK is stable. Clearly U(K) and K generate the same variety V(L), so V(L) is generated by a stable universal class, and henceL is stable. For the implication (1) )(3), suppose L is stable. Then
V(L) is generated by a stable universal class K. By Theorem 2.4, K is generated by its finite members, which is a stable class since K is stable. Thus, V(L) is generated by a stable class of finite modal algebras.
variety generated by Ksi. Suppose A 2 K. If A is subdirectly irreducible, then A 2 Ksi, and there is nothing to prove. OtherwiseAis a subdirect product of its finite subdirectly irreducible homomorphic images. Therefore, to conclude thatAis in the variety generated byKsi, it is sufficient to see that every subdirectly irreducible homomorphic imageBofAbelongs to this variety. LetB be a subdirectly irreducible homomorphic image ofA. SinceAis finite, so isB. Therefore, the dual Y= (Y, R) of Bis rooted. Let Y0= (Y0, R0) be obtained from Y by adding a new reflexive root that sees every point ofY; that is,Y0=Y[{r}for somer62Y andR0=R[{(r, x)|x2Y0}. Let Xbe the dual ofA. SinceBis a homomorphic image ofA, we see that Yis a generated subframe
ofX. SinceAis not subdirectly irreducible, butBis,Xis not rooted, butYis. SoY6=X. Define
f :X !Y0 by mapping the points ofY to themselves and every other point ofX tor. It is easy to see thatf is an onto stable map. Therefore, there is a stable embedding from the dual algebra
B0 ofY0 to A. Since A2K andKis stable, we conclude thatB0 2K. As Y0 is finite and rooted,
B0 is subdirectly irreducible, and henceB02Ksi. Now,Y is a generated subframe ofY0, soB is a homomorphic image ofB0, and henceBbelongs to the variety generated by Ksi, as desired. ⇤
As we already pointed out, we will often not distinguish between modal algebras and their duals. So ifA is a finite modal algebra andX is its dual, then we often write⇢(X) instead of ⇢(A). As usual, we denote a reflexive point by and an irreflexive point by .
We let Form be the inconsistent logic, KD:= K+ (⇤p! ⌃p) be the logic of serial frames, andKT:=K+ (p!⌃p) be the logic of reflexive frames. As follows from [3, Thm. 8.3],Form is axiomatized by⇢( ), KDis axiomatized by ⇢( ) and⇢( ), andKT is axiomatized by ⇢( ) and ⇢( ). We give more examples in the next theorem.
Theorem 3.2.
(1) For a finite modal algebra A, let Stable(A) be the class of modal algebras that are iso-morphic to stable subalgebras of A, and let L(Stable(A))be the logic of Stable(A). Then L(Stable(A))is a stable modal logic.
(2) Every extension of S5is a stable modal logic.
Proof. (1). ClearlyStable(A) is a stable class of finite modal algebras. Now apply Theorem 3.1. (2). It is well known that an S5-algebra is subdirectly irreducible i↵its dual is a cluster. It is easy to see that the class of finite clusters is a stable class. SinceS5 is the logic of this class, S5
is a stable logic by Theorem 3.1. It is also well known that for every extensionL ofS5there is n such thatLis the logic ofm-clusters formn. This class is stable by the same reasoning. Thus,
every extension ofS5is stable. ⇤
We next show that there are continuum many stable modal logics. In fact, we will see that there are continuum many stable logics above the logicwK4of weakly transitive frames, where a frame F= (X, R) is weakly transitive provided xRy, yRz, and x6=z imply xRz. For our proof we will make use of Jankov formulas for finitewK4-algebras from [1]. For a finite subdirectly irreducible
wK4-algebraAlet (A) be the Jankov formula ofA. Then for awK4-algebraB, we have B6|= (A) i↵Ais a subalgebra of a homomorphic image ofB(see [1, Prop. 7.5]).
Dually, ifFis a finite rooted weakly transitive frame andGis an arbitrary weakly transitive space, then we have
G6|= (F) i↵Fis a p-morphic image of a generated subframe ofG.
C3 C4 C5
. . .
Figure 1
LetN 3:={n2N|n 3}. ForI✓N 3 set
KI={X|9n2I such thatXis a stable image ofCn}.
It is clear thatKI is a stable class of modal spaces. LetLI be the logic ofKI. SinceKI is stable, by Theorem 3.1,LI is a stable modal logic. We show that ifI6=J, thenLI 6=LJ. For this we first show thatn2I i↵ (Cn)2/ LI. Ifn2I, thenCn 2KI, so Cn |=LI. Clearly Cn6|= (Cn), which implies that (Cn)62LI. Conversely, suppose that (Cn)62LI. Since LI is the logic ofKI, there isX2 KI such that X6|= (Cn). Therefore,Cn is a p-morphic image of a generated subframe of
X. But the only generated subframe ofXisX, soKI is closed under generated subframes. Also a
p-morphic image ofXis a stable image ofX, andKI is closed under stable images. Thus,Cn2KI. Ifn /2I, then there ism 2I and an onto stable mapf :Cm ⇣Cn. Since m=|Cm|>|Cn|=n, we see that f must identify at least two points of Cm. Therefore, there are distinct x, y 2 Cm with f(x) = f(y). Thus, xRmy and f(x)Rnf(y), which is a contradiction because f is stable. Consequently,n2I, and son2Ii↵ (Cn)2/ LI. Now, ifI6=J, then without loss of generality we may assume that there isn2I\J. Therefore, (Cn)2LJ \LI, and henceLI 6=LJ. Since each Cn is weakly transitive and non-transitive, we conclude that {LI |I✓N 3} is a continual family
of weakly transitive non-transitive stable logics. ⇤
On the other hand, we will see in Section 7 that many well-known modal logics are not stable. For example, by Theorem 7.6, none of the logicsK4,S4,KB, and K5 is stable, and neither are the logicsGL,S4.Grz,K4.1, andS4.1. This motivates the key definition of the next section.
4. L-stable modal logics
Since many well-known modal logics are not stable, we require to relativize the concept of stability as follows.
Definition 4.1.
(1) SupposeK andV are two classes of modal algebras withK✓V. We say that Kis V-stable (or stable within V) provided for A,B 2 V, if B 2 K and there is a stable embedding
A⇢B, thenA2K.
(2) Suppose S is a normal modal multi-conclusion consequence relation and T is a normal extension of S. We say that T is S-stable (or stable over S)provided the universal class U(T)isU(S)-stable.
(3) Suppose L is a normal modal logic and M is a normal extension of L. We say that M is L-stable (or stable overL)provided the variety V(M) is generated by a universal class which isV(L)-stable.
Lemma 4.2. SupposeL, M, N are normal modal logics withL✓M ✓N.
(1) If M is stable, thenM isL-stable.
(2) If N isL-stable, then N isM-stable.
(3) If V(M) is aV(L)-stable class, then N isM-stable i↵ N isL-stable.
Proof. (1). SinceM is stable,V(M) is generated by a stable universal class K. As K is stable, it is obviouslyV(L)-stable. Thus,M isL-stable.
(3). One implication follows from (2). For the other, suppose N is M-stable. Then V(N) is generated by a universal classK which is V(M)-stable. Since V(M) is V(L)-stable, K is also
V(L)-stable. Therefore,N isL-stable. ⇤
We next show that Theorem 3.1 has an obvious generalization to L-stable logics, provided L admits filtration. We recall the algebraic account of filtrations given in [3, Sec. 4].
Definition 4.3. SupposeA= (A,⌃)is a modal algebra, V is a valuation onA, and ⌃is a finite set of formulas closed under subformulas. LetA0 be the Boolean subalgebra ofAgenerated byV(⌃). ThenA0 is finite because ⌃is finite. Set D={V(')|⌃'2⌃}. Let ⌃0 be a modal operator on A0 andV0 be a valuation on A0= (A0,⌃0)satisfying
• The inclusion A0,!Ais a stable embedding; • V0(p) =V(p)for all propositional lettersp2⌃; • ⌃0a=⌃afor all a2D.
Then(A0, V0) is called a filtration of (A, V) through⌃.
By the Filtration Lemma (see [3, Lem. 4.4]), if (A0, V0) is a filtration of (A, V) through ⌃, then V(') =V0(') for all '2⌃.
Definition 4.4. A normal modal logicLadmits filtrationif for everyL-algebraA, every valuation V on A, and every finite set⌃ of formulas closed under subformulas, there is a filtration(A0, V0)
of(A, V) through⌃such that A0 is anL-algebra.
It is easy to see that if L admits filtration, then L has the finite model property. Indeed, if L6`', then there is anL-algebra Aand a valuationV onAsuch thatA6|='. Let⌃be the set of subformulas of'. SinceLadmits filtration, there is a finiteL-algebra A0 and a valuationV0 onA0 such that (A0, V0) is a filtration of (A, V) through⌃. By the Filtration Lemma, A0 6|='. Thus,L has the finite model property.
Theorem 4.5. SupposeLis a normal modal logic that admits filtration andM is a normal exten-sion ofL. The following are equivalent.
(1) M isL-stable.
(2) M is axiomatizable overLby stable rules of finite L-algebras.
(3) V(M)is generated by a V(L)-stable class of modal algebras.
(4) V(M)is generated by a V(L)-stable class of finite modal algebras.
Proof. The proof is very similar to the proofs of Theorem 3.1 and [3, Thm. 7.4]. One simply has to useL-filtrations instead of arbitrary filtrations in the corresponding steps. As an example, we prove the implication (1) ) (2). Suppose that M is L-stable. Then V(M) is generated by an L-stable universal classK. LetAbe the set of finite nonisomorphicL-algebras not belonging toK. LetB be anL-algebra. We claim thatB2K i↵B |=⇢(A) for each A2A. SupposeB2K. If there isA2Awith B6|=⇢(A), then by [3, Prop. 7.1], there is a stable embedding A⇢B. Since
K is L-stable, A 2 K, contradicting A 2A. Therefore, B |= ⇢(A) for each A2 A. Conversely, suppose B satisfies ⇢(A) for each A 2 A. If B 62 K, then since K is a universal class, there is a multi-conclusion rule / such that K |= / but B 6|= / . Let V be a valuation on B refuting / , and let⌃ be the set of subformulas of [ . SinceL admits filtration, there is a finite L-algebra Aand a valuation V0 onA such that (A, V0) is a filtration of (B, V) through ⌃. Therefore,A refutes / , yielding A62 K. Thus,A2A. On the other hand, since Ais a stable subalgebra of B, by [3, Prop. 7.1],B 6|=⇢(A). The obtained contradiction proves that B 2K i↵
B|=⇢(A) for eachA2A. SinceKgeneratesV(M), we conclude thatM is axiomatized overLby
{⇢(A)|A2A}. ⇤
that another equivalent condition forM to beL-stable is thatM is generated by anL-stable class of finite subdirectly irreducibleL-algebras. Examples of such logics are K4andS4.
Remark 4.7. The definition of a normal modal multi-conclusion consequence relationSadmitting filtration, the proof that suchS has the finite model property, and an analogue of Theorem 4.5 are proved similarly, so we skip the details.
5. K4-stable and S4-stable logics
We next concentrate on the well-known modal logicsK4andS4, and studyK4-stable andS4 -stable logics. Since bothK4 andS4 admit filtration, Theorem 4.5 and Remark 4.6 hold for both logics.
LetA= (A,⌃) be aK4-algebra. As usual, fora2A, we set⌃+a=a_⌃aand⇤+a=a^⇤a. ThenA+= (A,⌃+) is anS4-algebra. We callAwell-connected if⌃+a^⌃+b= 0 impliesa= 0 or b= 0. Equivalently,Ais well-connected if⇤+a_⇤+b= 1 impliesa= 1 orb= 1. Each subdirectly irreducible K4-algebra is well-connected. To see this, suppose A is subdirectly irreducible and
⇤+a_⇤+b = 1. If a, b 6= 1, then since A is subdirectly irreducible, it has an opremum c 6= 1, so a, b 6= 1 implies⇤+a,⇤+b c, so⇤+a_⇤+b c 6= 1, a contradiction. Therefore, a = 1 or b= 1, and henceAis well-connected. While the converse is not true in general, it is true for finite
K4-algebras.
For a K4-space X = (X, R), let R+ be the reflexive closure of R. Then X+ = (X, R+) is an
S4-space. Since in a K4-space R! = R+, we see that a K4-space is rooted i↵ there is x 2 X such thatX =R+[x]. It is well known that aK4-algebra is well-connected i↵its dualK4-space is rooted.
Lemma 5.1. SupposeA= (A,⌃A) andB= (B,⌃B)areK4-algebras. If Ais well-connected and
Bis a stable subalgebra ofA, thenB is well-connected.
Proof. Since B is a stable subalgebra of A, we see that ⌃Ab ⌃Bb for all b 2 B. Therefore,
⌃+
Ab ⌃+Bb for all b2B. Now, leta, b2B with ⌃+Ba^⌃+Bb= 0. Then ⌃+Aa^⌃+Ab = 0. As Ais
well-connected,a= 0 orb= 0. Thus,Bis well-connected. ⇤
As was shown in [3, Sec. 6.2], ifAis a finite subdirectly irreducibleK4-algebra, then the stable rule⇢(A) = / can be rewritten as thestable formula
(A) :=^{⇤+ | 2 }!_{⇤+ | 2 }
so that for everyK4-algebraB, we haveB6|= (A) i↵there is a subdirectly irreducible homomor-phic imageC ofB such thatAis isomorphic to a stable subalgebra ofC. IfB is well-connected, then one implication of this equivalence can be strengthened.
Lemma 5.2. Suppose A is a finite subdirectly irreducible K4-algebra andB is a well-connected K4-algebra. Ifh:A⇢B is a stable embedding, thenB6|= (A).
Proof. LetV be a valuation on A such that V(pa) = a, and letV0 := h V. As in the proof of [3, Thm. 6.8], we have thatV0(⇤+ ) = 1 for all 2 andV0(⇤+ )6= 1 for all 2 . Therefore, V0(V{⇤+ | 2 ) = 1, and since B is well-connected, V0(W{⇤+ | 2 ) 6= 1. Thus, V0
witnesses thatB6|= (A). ⇤
Example 5.3. The converse of Lemma 5.2 is not true in general. LetAandBbe theK4-algebras that are dual to theK4-framesFandGshown below.
Clearly bothF,Gare rooted andFis a generated subframe ofG. SoAis a subdirectly irreducible homomorphic image ofB, and henceB6|= (A). On the other hand,Fis not a stable image ofG since an onto stable map would send the root ofGto the root ofF. But the root ofGis reflexive while the root ofFis irreflexive, a contradiction. Thus, there does not exist a stable embedding of
Ainto B.
Of course, the key is that the root ofFis irreflexive. The next lemma shows that this is essential.
Lemma 5.4. Let F= (X, R),G= (Y, Q), andG0= (Y0, Q0) be finiteK4-frames such thatF is a stable image ofGand Gis a generated subframe ofG0.
(1) There is a finiteK4-frame F0= (X0, R0) such thatF is a generated subframe of F0,F0 is a stable image of G0, and the following diagram commutes.
G F
G0 F0
(2) If in additionFhas a reflexive root, thenFis a stable image ofG0and the following diagram commutes.
G F
G0
Proof. (1). Letf :G⇣F be an onto stable map. IfG=G0, then there is nothing to show as we can takeF0to beF. Otherwise we constructF0by adding a reflexive root toF; that is,X0=X[{r} for somer62X andR0=R[{(r, x)|x2X}[{(r, r)}. It is easy to see thatF0is aK4-frame and thatFis a generated subframe ofF0. Defineg:Y0!X0 so that the restriction ofg toY isf and gmapsY0\Y to the rootrof F0; that is,
g(y) = (
f(y) ify 2Y r otherwise.
Sincef is onto andY0\Y 6=;, it is clear thatgis a well-defined onto map. To see thatgis stable, letx, y2Y0withxy. Ifx2Y, then there is nothing to verify asf is stable. Otherwiseg(x) =r is the reflexive root, and so g(x)R0g(y). Finally, it follows from the definition that the diagram commutes.
(2). Defineg:Y0!X so that the restriction ofg toY is f andg mapsY0\Y to the reflexive rootrofF(providedY0\Y 6=?). An argument similar to the above shows thatgis an onto stable
map, and that the diagram commutes. ⇤
Using duality theory, we can reformulate Lemma 5.4 in algebraic terms. For a K4-algebra A= (A,⌃) consider the condition:
(⇤) There is an atoma2Asuch thata⌃bfor eachb6= 0.
If A is the dual ofF, then it is easy to see thatF has a reflexive root i↵ A satisfies (⇤). Thus, Lemma 5.4 can be reformulated as follows.
Lemma 5.5. Let A,B, and B0 be finite K4-algebras such that there is a stable embedding of A
(1) There is a finiteK4-algebraA0such thatAis a homomorphic image ofA0,A0is isomorphic to a stable subalgebra ofB0, and the following diagram commutes.
B A
B0 A0
(2) If in additionAsatisfies(⇤), then there is a stable embedding ofAintoB0 and the following diagram commutes.
B A
B0
We next build on Theorem 4.5 and obtain several more convenient characterizations for a logic above K4 to be K4-stable. For a class K of K4-algebras, we let Kwc denote the class of well-connected members ofK.
Theorem 5.6. Let L be a normal extension ofK4. The following are equivalent.
(1) L isK4-stable.
(2) L is axiomatizable overK4by stable rules of finite K4-algebras.
(3) V(L)is generated by a K4-stable class ofK4-algebras.
(4) V(L)is generated by a K4-stable class of finiteK4-algebras.
(5) V(L)wcisK4-stable.
(6) If A,B are subdirectly irreducibleK4-algebras, A|=L, and B is a stable subalgebra of A, then B|=L.
Moreover, eachK4-stable logic is axiomatizable by stable formulas.
Proof. Since K4admits filtration, the equivalence of the first four conditions follows from Theo-rem 4.5. To prove the implication (4))(5), we require the following claim.
Claim 5.7. SupposeV(L) is generated by aK4-stable classK of finiteK4-algebras, Ais a finite subdirectly irreducibleK4-algebra, andA6|=L. Then (A)2L.
Proof. Suppose that (A)62L. SinceK generatesV(L), there is B2K such that B6|= (A). By [3, Thm. 6.8], there is a subdirectly irreducible homomorphic imageCofBand a stable embedding
of A into C. By Lemma 5.5(1), there is a K4-algebra D such that D is isomorphic to a stable
subalgebra ofB andAis a homomorphic image ofD. SinceK isK4-stable andB2K, we have thatD 2K. Because V(L) is closed under homomorphic images, A2V(L), which contradicts to
A6|=L. Therefore, (A)2L, as desired. ⇤
Now, suppose A,B are K4-algebras, with B 2 V(L)wc, and there is a stable embedding of A
intoB. Since Bis well-connected, so is Aby Lemma 5.1. IfA6|=L, then A6|='for some'2L.
AsK4admits filtration, there is a finiteK4-algebraCsuch thatCis a stable subalgebra ofAand C6|='. But then there is a stable embedding of C into B. SinceB is well-connected, so isC by Lemma 5.1. Therefore, asCis finite, it is subdirectly irreducible. By Claim 5.7, (C)2L. Because there is a stable embedding ofCintoB, it follows by Lemma 5.2 thatB6|= (C), which contradicts toB|=L. Thus,A|=L, soA2V(L)wc, and henceV(L)wcisK4-stable.
that A 6|= '. Since K4 admits filtration, there is a finite K4-algebra C such that C is a stable subalgebra ofAandC6|='. AsAis subdirectly irreducible, it is well-connected. Therefore, so isC by Lemma 5.1. Thus, sinceCis finite, it is subdirectly irreducible. But then (6) yields thatC|=L. Consequently,V(L) is generated by the class of finite subdirectly irreducibleL-algebras. Since this class isK4-stable, (4) follows.
Finally, we show that K4-stable logics are axiomatizable by stable formulas. Suppose that L is a K4-stable logic. Let A be the set of finite nonisomorphic subdirectly irreducible K4 -algebras not belonging to V(L). We claim that L = K4+{ (A) : A 2 A}. The inclusion
K4+{ (A) :A2A} ✓L follows from Claim 5.7. For the reverse inclusion, let V be the variety corresponding to K4+{ (A) :A2 A}. As subdirectly irreducible members of V generateV, it is sufficient to show that each subdirectly irreducible member ofV belongs toV(L). Let B be a subdirectly irreducible member ofV. IfB 6|=L, then sinceK4 admits filtration, there is a finite
K4-algebra B0 such that B0 is a stable subalgebra of B and B0 6|= L. BecauseB is subdirectly irreducible, it is well-connected. Therefore, B0 is well-connected by Lemma 5.1. Thus, as B0 is finite, it is subdirectly irreducible. SoB0 2 A. Now, B 6|= (B0) by Lemma 5.2. Consequently, B62V, a contradiction. This yields thatB|=L, and henceL=K4+{ (A) :A2A}. ⇤
Example 5.8. On the other hand, there exist logics above K4 that are axiomatizable over K4
by stable formulas, but are notK4-stable logics. To see this, consider theK4-framesF,G, andH shown below.
F H G
We setL=K4+ (F). ClearlyHis the only non-singleton rooted upset ofHandFis not a stable image ofHsinceHhas a reflexive root andFhas an irreflexive root. Therefore,H|= (F), and so H|=L. Next consider the mapH!Gindicated in the picture above. It is easy to see that it is a stable map fromHontoG. IfL wereK4-stable, Theorem 5.6 would yieldG|= (F). However, G6|= (F) as we already discussed in Example 5.3. Thus, Lis notK4-stable.
Remark 5.9. It is of interest to study further the class of modal logics axiomatized by stable formulas. It is not even clear whether all such logics have the finite model property.
In Example 5.8 it was essential that the root of G was irreflexive. We next show that every logic that is axiomatized overK4 by stable formulas of finiteK4-frames with reflexive roots are
K4-stable. In algebraic terms we will show that every logic that is axiomatized overK4by stable formulas of finiteK4-algebras that satisfy (⇤) areK4-stable.
Proposition 5.10.
(1) Let A be a finite K4-algebra satisfying (⇤). For a well-connected K4-algebra B we have
B6|= (A)i↵ there is a stable embedding ofAintoB.
(2) SupposeL=K4+{ (Ai)|i2I}, where each Ai satisfies(⇤). ThenL isK4-stable. Proof. (1). The right to left direction was already proven in Lemma 5.2. For the left to right direction, letBbe aK4-algebra such thatB6|= (A). Note that for this direction it is not needed thatBis well-connected. SinceK4admits filtration, there is a finiteK4-algebraCthat is a stable subalgebra ofB andC6|= (A). By [3, Thm. 6.8], there is a subdirectly irreducible homomorphic imageDofCand a stable embedding ofAintoD. SinceAsatisfies (⇤), by Lemma 5.5(2), there is a stable embedding ofAintoC, and hence a stable embedding ofAintoB.
(2). It is immediate from (1) that the class of well-connected algebras of L isK4-stable. Now
Since every finite subdirectly irreducibleS4-algebra satisfies (⇤), Proposition 5.10 yields:
Corollary 5.11. Let A be a finite subdirectly irreducible S4-algebra. For every well-connected S4-algebraBwe have B6|= (A)i↵ there is a stable embedding ofAintoB.
This immediately yields that all logics axiomatizable over S4 by stable formulas of finite sub-directly irreducibleS4-algebras are S4-stable. Thus, for normal extensions of S4 we obtain the following improvement of Theorem 5.6.
Corollary 5.12. LetL be a normal extension ofS4. The following are equivalent.
(1) L isS4-stable.
(2) L is axiomatizable overS4by stable rules of finite S4-algebras.
(3) L is axiomatizable overS4by stable formulas of finite subdirectly irreducibleS4-algebras.
(4) V(L)is generated by a S4-stable class ofS4-algebras.
(5) V(L)is generated by a S4-stable class of finiteS4-algebras.
(6) V(L)wcisS4-stable.
(7) If A,B are subdirectly irreducible S4-algebras, A|=L, and B is a stable subalgebra of A, then B|=L.
6. Connection with stable superintuionistic logics
In this section we discuss the connection betweenK4-stable logics andS4-stable logics, as well as betweenS4-stable logics and stable superintuionistic logics of [2]. We conclude the section by showing that there are continuum many S4-stable logics, and continuum many K4-stable logics between K4 and S4. While most of the results in the previous sections are stated in terms of algebras, from now on we will mainly work with frames, and utilize their geometric intuition.
We follow the notation of [9, Sec. 9.6]. If Lis a superintuitionistic logic, then we denote by⌧L the least modal companion ofL. Also, ifM is a normal extension ofS4, then we denote by⇢M the superintuitionistic fragment ofM. For anS4-frameF= (X, R), let⇢F= (⇢X,⇢R) be the skeleton
F, which is obtained by modding out the clusters ofF. It is well known (see, e.g., [9, Lem. 9.67])
that for everyS4-frameF, we haveF|=⌧Li↵⇢F|=L.
Theorem 6.1.
(1) Let F= (X, R)andG= (Y, R)be finite rootedS4-frames. IfGis a stable image ofF, then
⇢Gis a stable image of ⇢F.
(2) If L is a stable superintuitionistic logic, then⌧LisS4-stable.
(3) If L=IPC+{ (Gi)|i2I}, then⌧L=S4+{ (Gi)|i2I}.
Proof. (1). Let f :X ! Y be an onto stable map. Since the quotient map ⇡Y :Y ! ⇢Y is an onto p-morphism, the composition⇡Y f :X !⇢Y is onto and stable. Defineg :⇢X !⇢Y by g(⇡X(x)) =⇡Y(f(x)). Because⇡Y f is stable, gis well defined, and it is clear thatg is onto and stable. Therefore,⇢Gis a stable image of⇢F.
(2). LetLbe a stable superintuitionistic logic. By [2, Thm. 6.8],Lhas the finite model property. Therefore, so does⌧L(see, e.g., [9, p. 328]). Thus, ⌧Lis the logic of its finite rooted frames. We show that this class isS4-stable. LetF be a finite rooted ⌧L-frame and Gbe a finite rooted S4 -frame that is a stable image ofF. SinceF is a⌧L-frame,⇢Fis anL-frame. By (1),⇢Gis a stable image of ⇢F. As L is stable, ⇢G |=L. Therefore, G|= ⌧L, and hence the class of finite rooted ⌧L-frames isS4-stable. Thus, by Corollary 5.12,⌧Lis anS4-stable logic.
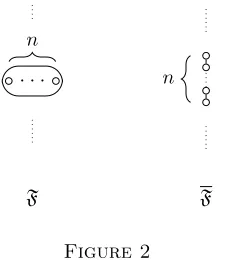
· · ·
F n
n
[image:12.595.244.357.110.240.2]F
Figure 2
i2I. From (1) it follows that⇢Giis a stable image of⇢F. SinceGiis partially ordered,Gi⇠=⇢Gi, implying thatGiis a stable image of⇢F. Thus,⇢F6|=L, and soF6|=⌧L. ⇤
For a finite rooted S4-frame F = (X, R), let F = (X, R) be the partially ordered S4-frame that is obtained from F by unraveling each n-cluster into an n-chain (see Figure 2); that is, if X =C1[· · ·[Ck is the division ofF into clusters, withCi={xi1, . . . , xini}, then for allx=xil andy=xjm, we have
xRy i↵ (
i=j andl mor i6=j andxRy. . Note thatwini is the root of the chainCi in F.
Theorem 6.2.
(1) Let F= (X, R)and G= (Y, R) be finite rooted S4-frames, with Gbeing partially ordered. ThenF is a stable image of Gi↵ Fis a stable image of G.
(2) If M isS4-stable, then ⇢M is stable.
(3) If M =S4+{ (Fi)|i2I}, then⇢M =IPC+{ (Fi)|i2I}.
Proof. (1). Since F is easily seen to be a stable image of F, the implication from right to left is obvious. Conversely, suppose thatf :G!F is an onto stable map. We transformf into a stable mapf :G!F by shu✏ing the values off belonging to some cluster ofF. LetCi be a cluster of Fand letY0 =f 1(Ci). We viewY0 as a subframe ofG, and definef :Y0!Ci by induction on the depth of points inY0. The idea is to map the points of the smallest depth injectively onto the firstni 1 points of Ci and all the other points ofY0 to the root wini. More precisely, suppose
{y1, . . . , ym} ✓ Y0 are the points of depth d and we have mapped all the points of Y0 of smaller depth injectively onto{wi1, . . . , wil}. If mni l, then set f(yh) =xil+h for all 1 hm. If m6ni l, then define f as before for allyl withlm (ni l) and map all the other points of Y0to wini. It is straightforward to check that f is stable.
(2). SinceM isS4-stable, it has the finite model property. Therefore, so does⇢M (see, e.g., [9, p. 328]). It thus suffices to show that the finite rooted⇢M-frames form a stable class. SupposeG is a stable image of a finite rooted⇢M-frameF. FromF|=⇢M it follows thatF|=M. SinceM is stable,G|=M. Consequently,G|=⇢M.
(3). SinceM isS4-stable,⇢M is stable by (2). LetL=IPC+{ (Fi)|i2I}. By [2, Thm. 6.11], Lis stable. Therefore, both⇢M andLhave the finite model property, and hence it suffices to show that the two logics have the same finite rooted frames. Suppose G is a finite rooted frame such thatG|=⇢M. IfG6|=L, then there isi2I such thatG6|= (Fi). Therefore,Fiis a stable image
ofG. By (1),Fi is a stable image ofG. Thus,G6|= (Fi), and so G6|=M, contradictingG|=⇢M.
Therefore,Fi is a stable image ofG. By (1),Fi is a stable image of G. Thus, G6|= (Fi), yielding
thatG6|=L. ⇤
Corollary 6.3.
(1) A superintuitionistic logic L is stable i↵⌧LisS4-stable.
(2) An S4-stable logic is the least modal companion of a superintuitionistic logic i↵ it can be axiomatized by stable formulas of finite rooted partially ordered S4-frames.
Proof. (1). It is well known thatL=⇢ ⌧L(see, e.g., [9, Thm. 9.57]). Now apply Theorems 6.1(3) and 6.2(3).
(2). SupposeM is the least modal companion of a superintuitionistic logicL. ThenM =⌧(L), and soL=⇢(M). SinceM isS4-stable,Lis stable by Theorem 6.2(2). Therefore, by [2, Thm. 6.11], there are finite rooted partially ordered frames{Fi|i2I} such thatL=IPC+{ (Fi)|i2I}. Thus,M =S4+{ (Fi)| i2I} by Theorem 6.1(3). Conversely, if M =S4+{ (Fi)|i2I} for some finite rooted partially orderedS4-frames{Fi|i2I}, then⇢(M) =IPC+{ (Fi)|i2I}by Theorem 6.2(3). SinceFi=Fifor alli2I, we conclude that⌧ ⇢(M) =IPC+{ (Fi)|i2I}=M,
and henceM is the least modal companion of⇢(M). ⇤
Remark 6.4. On the other hand, the greatest modal companion of a stable superintuitionistic logic is not necessarilyS4-stable. For instance, the Grzegorczyk logicS4.Grzis the greatest modal companion of the intuitionistic propositional calculusIPC, and we will see in Section 7 that it is notS4-stable.
Next we discuss connections betweenS4-stable andK4-stable logics. For a formula ', let'+ be obtained from'by replacing each subformula of'of the form⇤ by ^⇤ . If L=S4+ is a normal extension ofS4, letL+ =K4+ +, where +={'+|'2 }. For a binary relation RonX, letR+:=R[{(x, x)|x2X}be thereflexive closure ofR. For aK4-spaceF= (X, R), define thereflexivization ofFas F+= (X, R+). ThenF+ is anS4-space and F|=L+ i↵F+|=L. Therefore,L+is the logic of{F|F+|=L}(see, e.g., [9, Sec. 3.9]).
Lemma 6.5.
(1) Let F be a finiteS4-frame and let Gbe aK4-space. ThenFis a stable image of Gi↵ Fis a stable image of G+.
(2) If L=S4+{ (Fi)|i2I}, where theFi are S4-frames, thenL+=K4+{ (Fi)|i2I}.
(3) If L isS4-stable, then L+ isK4-stable. Proof. (1). Immediate sinceFis reflexive.
(2). By (1) and Corollary 5.11, if G is a rooted K4-space, then G |= (Fi) i↵ G+ |= (Fi). Therefore, G|= L+ i↵ G+ |= Li↵G+ |={ (Fi) |i 2I} i↵G|={ (Fi)| i2 I}. Thus, L+ and
K4+{ (Fi)|i2I}have the same rootedK4-spaces, and hence the two logics coincide.
(3). If L is S4-stable, then L is axiomatized by stable formulas of S4-frames. By (2), L+ is axiomatized by the same stable formulas. In particular,L+ is axiomatized by stable formulas of frames with reflexive roots. Thus,L+ isK4-stable by Proposition 5.10. ⇤ For two normal modal logicsL1 andL2, letL1_L2 denote the join of these logics in the lattice of normal modal logics.
Lemma 6.6. Let Lbe a normal extension of K4.
(1) If S4✓L, then LisK4-stable i↵L isS4-stable.
(2) If L isK4-stable, then S4_L isS4-stable.
(3) If L=K4+{ (Fi)|i2I}, thenS4_L=S4+{ (Fi)|Fi=F+i }.
Proof. (1). Observe thatS4is aK4-stable class and apply Lemma 4.2(3).
(2). By Theorem 5.6, the rootedL-spaces areK4-stable. Therefore, the rooted (S4_L)-spaces areS4-stable. Thus,S4_LisS4-stable by Corollary 5.12.
(3). LetGbe a rootedS4-space. We haveG|=S4_L i↵G|=L i↵G|= (Fi) for alli2I. It is obvious thatG|= (Fi) for everyFi that contains an irreflexive point because no suchFican be a stable image of a reflexive space. Therefore,G|= (Fi) for all i2I is equivalent to G|= (Fi) for allFi withFi=F+i . Thus,S4_L=S4+{ (Fi)|Fi=F+i }.
(4). First suppose that each Fi contains an irreflexive point. Then Fi 6= F+i for all i 2 I. Therefore, (3) implies thatL_S4=S4, and hence L✓S4. Conversely, suppose that some Fi is reflexive. SinceFi6|=L andFiis anS4-frame, we see thatL6✓S4. ⇤
Theorem 6.7.
(1) There are continuum manyK4-stable logics aboveS4.
(2) There are continuum manyK4-stable logics between K4andS4.
Proof. (1). By [2, Thm. 6.13], there are continuum many stable superintuitionistic logics. Since L6=L0 implies⌧L 6=⌧L0, this together with Lemma 6.1 yields continuum many S4-stable logics above S4. By Lemma 6.6(1), these logics are also K4-stable. Thus, there are continuum many
K4-stable logics aboveS4.
(2). Consider the sequence {Fn | n 2 N 1} shown in Figure 3. By [2, Lem. 6.12], Fn is not a stable image ofFm for n 6=m. We slightly modify the sequence. For n 2N 1, letGn be the
K4-frame that is obtained from Fn by making x1 irreflexive. The proof of [2, Lem. 6.12] shows thatGnis not a stable image ofGm forn6=m.
r xn+1
xn xn 1 x3 x2 x1
yn yn 1 y3 y2 y1
Fn
r xn+1
xn xn 1 x3 x2 x1
yn yn 1 y3 y2 y1
Gn
Figure 3
For I ✓N 1 letLI =K4+{ (Gn)|n 2I}. Since each Gn has a reflexive root, by Proposi-tion 5.10, everyLI isK4-stable. As eachGn has a an irreflexive point, by Lemma 6.6(4),LI ✓S4 for everyI ✓N 1. Thus, everyLI is aK4-stable logic betweenK4 andS4. Finally, ifn2I\J, then (Gn)2LJ \LI, so the cardinality of{LI |I ✓N 1}is that of continuum, completing the
proof. ⇤
7. Examples of K4-stable and S4-stable logics
In this final section we give many examples ofK4-stable andS4-stable logics, and compare them to subframe and splitting transitive logics. We also show, as promised earlier, that some well-known logics are not stable.
• D4=K4+⇤p!⌃p, the logic of serialK4-frames;
• K4B=K4+p!⇤⌃p, the logic of symmetricK4-frames;
• K4.2=K4+⌃(p^⇤q)!⇤(p_⌃q), the logic of directedK4-frames;
• K4.3=K4+⇤(⇤+p!q)_⇤(⇤+q!p), the logic of connected K4-frames;
• K4BWn=K4+bwn, the logic ofK4-frames of widthn, where
bwn:= n^1
i=0
⌃pi! _
0i6=jn
⌃(pi^⌃+pj);
• K4Altn =K4+altn, the logic of K4-frames such that each point hasn alternatives, where
altn:=⇤p0_⇤(p0!p1)_· · ·_⇤(p0^· · ·^pn 1!pn).
We also letK4BTWn be the logic ofK4-frames of top width n, and consider the following normal extensions ofS4:
• S5=S4_K4B;
• S4.2=S4_K4.2;
• S4.3=S4_K4.3;
• S4BWn=S4_K4BWn;
• S4BTWn=S4_K4BTWn;
• S4Altn=S4_K4Altn.
Their corresponding superintuitionistic fragments are the following logics:
• CPC=IPC+p_¬p, the classical logic;
• LC=IPC+ (p!q)_(q!p), the G¨odel-Dummett logic;
• KC=IPC+¬p_¬¬p, the logic of weak excluded middle;
• BWn=IPC+Wni=0(pi!Wj6=ipj);
• BTWn=IPC+V0ijn¬(¬pi^¬pj)!Wni=0(¬pi!Wj6=i¬pj).
In fact,S5=⌧(CPC), S4.2=⌧(LC), S4.3=⌧(KC), and more generally, S4BWn=⌧(BWn) andS4BTWn =⌧(BTWn) for every n. Lemma 6.1 together with the axiomatizations provided in [2, Thm. 7.5] yield:
Proposition 7.1.The logicsS4.2andS4.3areS4-stable. More generally,S4BWnandS4BTWn
areS4-stable for every n. These logics are axiomatized by the following stable formulas:
(1) S4BWn=S4+ ( ) + ( ). In particular,S4.3=S4+ ( ) + ( ). (2) S4BTWn=S4+ ( ). In particular,S4.2=S4+ ( ).
SinceK4.2=S4.2+,K4.3=S4.3+, and more generally,K4BWn= (S4BWn)+andK4BTWn= (S4BTWn)+ for everyn, Proposition 7.1 together with Lemma 6.5 yield:
Proposition 7.2. The logics K4.2 and K4.3 are K4-stable. More generally, K4BWn and
K4BTWn are K4-stable for every n. These logics are axiomatized by the following stable
for-mulas:
(1) K4BWn=K4+ ( ) + ( ). In particular,K4.3=K4+ ( ) + ( ). (2) K4BTWn=K4+ ( ). In particular,K4.2=K4+ ( ).
It is well known (see, e.g., [9]) that all these logics under consideration have the finite model property, and hence are the logics of their finite rooted frames.
Theorem 7.3. The logicsD4,S4,K4B, and K4Altn areK4-stable for all n. They are
axiom-atized by the following stable formulas:
(2) S4=K4+ ( ) + ( );
(3) K4B=K4+ ( );
(4) K4Altn=K4+ ( · ·· ), where · ·· denotes the (n+ 1)-cluster.
Proof. Since all the logics in the above list have the finite model property, they are logics of their finite rooted frames. Therefore, to see that these logics areK4-stable, it suffices to show that their finite rooted frames form aK4-stable class. But this is straightforward.
As an example, we show that the class of finite rooted frames for K4B is K4-stable. Let F = (X, R) be a finite rooted KB-frame with root r. Then F is transitive and symmetric. Let f :F!Gbe a stable map onto the finite K4-frameG= (Y, R). We show that Gis symmetric. Suppose thatf(w)Rf(v). Since r is a root of F, rRw and rRv in F, and by symmetry, alsovRr implyingf(r)Rf(w) andf(v)Rf(r). Thus,f(v)Rf(w) by transitivity ofF.The stability of the other logics can be proven similarly. Next we verify the axiomatizations in terms of stable formulas.
(1). Let X be a K4-space. It is sufficient to show that X |= ⇤p ! ⌃p i↵ X |= ( ). If X6|=⇤p!⌃p, then there isx2X such that xRyfor ally2X. Therefore,{x}is a closed up-set ofX, and Y= ({x},;) is a finite rootedK4-frame. The unique map fromY onto is stable, and so we conclude thatX6|= ( ). Conversely, suppose thatX6|= ( ). Then there is a stable map from a topo-rooted closed up-setYofXonto . This implies thatYis a singleton with noR-successors, and henceXcontains a point with noR-successors. Thus,X6|=⇤p!⌃p.
(2). Let Xbe aK4-space. It is sufficient to show thatX|=p!⌃pi↵X|= ( ), ( ). Suppose X6|= ( ) or X6|= ( ). Then there is a topo-rooted closed up-set Y ofX and a stable map from Y onto or . Observe that under a stable map a preimage of an irreflexive point has to be irreflexive. Now both of the latter frames contain an irreflexive point, so in either caseYcontains an irreflexive point. Therefore, so doesX. Thus, Xis not reflexive, and soX6|=p!⌃p. For the converse, suppose thatxis an irreflexive point of X. Consider the closed up-set Y :=R+[x] of X, and letY be the correspondingK4-space. Clearlyxis a unique root ofY. Sincex /2R[x], there is a clopen subset ofXseparating xfromR[x]. Therefore, xis an isolated point of Y. Thus,Y is topo-rooted. IfY ={x}, then the unique map fromYonto is stable, and soX6|= ( ). Otherwise mappingxto the root of and the rest of Y to the top point of gives rise to a stable map, and henceX6|= ( ).
(3). As we already pointed out, K4B has the finite model property. Also, since K4+ ( ) is axiomatized overK4by the stable formula of a finite rootedK4-frame with a reflexive root, it has the finite model property by Proposition 5.10. Therefore, it is sufficient to show that for any finite rootedK4-frameF= (X, R), we haveF|=p!⇤⌃pi↵F|= ( ). SupposeF6|=p!⇤⌃p. ThenF is not symmetric, and so there arex, y2X such thatxRy butyRx. Definef :F! by mapping R+[y] to the top node of and the rest to the root of . It is easy to see that f is an onto stable map. Therefore,F6|= . Conversely, ifF6|= ( ), then sinceF is rooted, by Lemma 5.2, there is a stable map fromFonto . Letxbe a root ofFand let y2X be such thatf(y) is the top point of
. Sincef is stable,xRy but yRx. Thus,Fis not symmetric. This yields thatF6|=p!⇤⌃p. (4). Observe that there is a stable map from a finite rooted K4-frame F onto the (n+ 1)-cluster · ·· i↵the cardinality ofF is greater thann. The result follows since bothK4Altn and
K4+ ( · ·· ) have the finite model property. ⇤
As a corollary to Theorem 7.3 we obtain:
Corollary 7.4. The logicsS5andS4Altn areS4-stable for alln. They are axiomatized overS4
(1) S5=S4+ ( ).
(2) S4Altn=S4+ ( · ·· ).
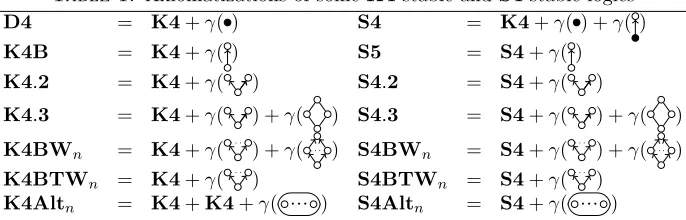
[image:17.595.126.469.195.305.2]In the following table we summarize the axiomatizations of K4-stable andS4-stable logics ob-tained above.
Table 1. Axiomatizations of someK4-stable andS4-stable logics
D4 = K4+ ( ) S4 = K4+ ( ) + ( )
K4B = K4+ ( ) S5 = S4+ ( )
K4.2 = K4+ ( ) S4.2 = S4+ ( )
K4.3 = K4+ ( ) + ( ) S4.3 = S4+ ( ) + ( )
K4BWn = K4+ ( ) + ( ) S4BWn = S4+ ( ) + ( )
K4BTWn = K4+ ( ) S4BTWn = S4+ ( )
K4Altn = K4+K4+ ( · ·· ) S4Altn = S4+ ( · ·· )
Remark 7.5. As we saw in Theorem 3.2,S5is actually a stable logic. Therefore, by [3, Prop. 7.6], it is axiomatizable overKby stable rules. We show thatS5is in fact axiomatized by the following set := {⇢( ),⇢( ),⇢( ),⇢( )} of stable rules. For this we first observe that a finite rooted frame validates i↵it is a cluster. It is easy to see that none of the frames , , , and
is a stable image of a finite cluster, so every finite cluster validates . Conversely, suppose thatF= (X, R) is a finite rooted frame that is not a cluster. There are several cases to consider. IfF is a singleton, then it is irreflexive, so is a stable image of F, and henceF6|=⇢( ). Suppose that Fhas at least two points. If Fcontains an irreflexive point x, then is a stable image of Fas mappingxto the irreflexive point of and the rest to the reflexive point of is an onto stable map. Therefore,F6|=⇢( ). Finally, suppose thatFis reflexive. IfFcontains exactly two pointsxandy, then without loss of generality we may assume thatxRy andyRx. Thus, mapping xto the root of andy to the other point of is stable and onto, and henceF6|=⇢( ). SupposeF
has at least three points. We show that there is a stable map fromFonto . SinceF is not a cluster, without loss of generality we may assume that there arex, y2FwithxRy. Then mapping xto the top node, y to the bottom right node, and all the other points to the bottom left node of provides a stable map that is also onto since Fcontains at least three points. This yields
F6|=⇢( ).
Now, let L be the logic axiomatized over K by . Since S5 is the logic of finite clusters and each such validates , we see thatL✓S5. Conversely, by Theorem 3.1, Lis the logic of a stable class of finite rooted frames. Each such must be a cluster. Therefore, S5✓ L, and hence S5 is axiomatized overK by .
Next, as promised, we show that several well-known logics are not stable. Namely, consider the following well-known logics (see, e.g., [9, p. 116]):
• KB=K+p!⇤⌃p, the logic of symmetric frames;
• K5=K+⌃⇤p!⇤p, the logic of Eucliedean frames;
• GL=K4+⇤(⇤p!p)!⇤p, the logic of dually well-foundedK4-frames;
• S4.Grz=S4+⇤(⇤(p!⇤p)!p)!p, the logic of NoetherianS4-frames;
• K4.1=K4.1+⇤⌃p!⌃⇤p, the logic ofK4-frames with degenerate final clusters;
Theorem 7.6. None of the logics K4,S4,KB, and K5 is stable. Neither are the logics GL, S4.Grz, K4.1, and S4.1. In fact, GL and K4.1 are not K4-stable and S4.Grz and S4.1 are neitherK4-stable norS4-stable.
Proof. We start by showing thatK4is not stable. If K4were stable, then by Theorem 3.1, there would exist a stable classKof finite rootedK4-frames whose logic isK4. Consider the finite rooted framesF,Gand an onto stable mapG⇣Fshown below.
G F
Note that G is transitive, but F is not. Since G is a K4-frame and G 6|= (G), we see that
K4 6|= (G). Therefore, there is H 2 K such that H 6|= (G). As G has a reflexive root, by Proposition 5.10(1),Gis a stable image ofH. Thus, sinceKis stable,G2K. The same reasoning yieldsF2K. But this is a contradiction asFis not transitive. Consequently, K4is not a stable logic.
A similar reasoning gives that S4is not a stable logic. We next show that KBis not a stable logic. If it were, then by Theorem 3.1, there would exist a stable classKof finite rootedKB-frames whose logic isKB.
Claim 7.7. There isF2K containing distinctx, y that are notR-related to each other. Proof. Clearly theKB-model
p q
refutesbw1=⌃p^⌃q!⌃(p^⌃+q)_⌃(q^⌃+p). Therefore, KB6`bw1. Thus, there isF2K such thatF6|=bw1. It is easy to see thatF has the desired property. ⇤ For such anF= (X, R) define F0= (X, R0), whereR0=R[{(x, y)}. Then the identity map is a stable map fromF onto F0. Since K is stable, F0 2 K. But this is a contradiction as F0 is not symmetric. Thus,KBis not a stable logic.
Next we show that K5 is not a stable logic. If K5 were stable, then there would be a stable classKof finite rootedK5-frames whose logic isK5.
Claim 7.8. There isF2K containingx, ysuch that xRy andxRx. Proof. Clearly theK5-model
p
refutes the formula':=p!⌃p_⇤?. Therefore,K56`'. Thus, there isF2K such thatF6|='.
It is easy to see thatFhas the desired property. ⇤
For such an F= (X, R) define F0 = (X, R0), where R0 =R[{(y, x)}. Then the identity map is a stable map from F onto F0. SinceK is stable, F0 2 K. But this is a contradiction as F0 is not Euclidean because in an Euclidean frame every successor is reflexive. Thus,K5is not a stable logic.
Next we show thatS4.Grzis not a stable logic. By Lemma 4.2(1), it is sufficient to show that
F G
Note that F is a S4.Grz-frame, while G is not. Therefore, by Corollary 5.12, S4.Grz is not
S4-stable. Thus, by Lemma 6.6(1),S4.Grzis notK4-stable.
The same argument yields thatS4.1is notS4-stable. Therefore, by Lemma 6.6(1),S4.1is not
K4-stable. Since S4.1 = S4_K4.1, Lemma 6.6(2) yields that K4.1 is not K4-stable. Thus, neitherS4.1norK4.1is stable by Lemma 4.2(1).
Finally, we show thatGLis not stable. For this it is sufficient to show thatGLis notK4-stable. It is easy to see that the map depicted below is a stable map from a finite rootedGL-frameFonto a finite rootedK4-frameG, which is not aGL-frame.
F G
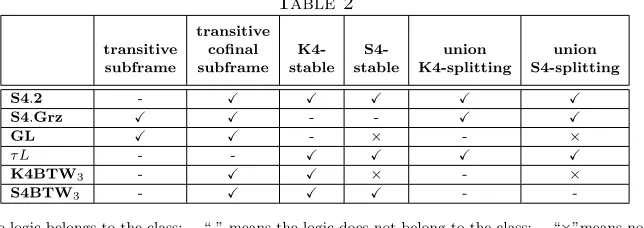
[image:19.595.140.462.393.507.2]The rest of the argument is the same as in the case ofS4.Grz. ⇤ We conclude the paper by comparingK4-stable logics to transitive subframe, cofinal subframe, and union-splitting logics (these classes of logics are discussed in detail in [9, Sec. 10.5 and 11.3]). Table 2 provides examples that tell these classes apart.
Table 2
transitive subframe
transitive cofinal subframe
K4-stable
S4-stable
union K4-splitting
union S4-splitting
S4.2 - X X X X X
S4.Grz X X - - X X
GL X X - ⇥ - ⇥
⌧L - - X X X X
K4BTW3 - X X ⇥ - ⇥
S4BTW3 - X X X -
-“X” means the logic belongs to the class; “-” means the logic does not belong to the class; “⇥”means not applicable.
• By Proposition 7.1,S4.2isS4-stable. Therefore, by Lemma 6.6(1),S4.2isK4-stable. It is well known that S4.2is S4-splitting (see, e.g., [13]). SinceS4 is a union K4-splitting, it follows thatS4.2is a unionK4-splitting. Finally, it is well known thatS4.2is a cofinal subframe logic (see, e.g., [9, Sec. 9.4]), and it is easy to see that S4.2is not a subframe logic.
• By Theorem 7.6,S4.Grzis neitherS4-stable norK4-stable. On the other hand, it is well known that S4.Grz is a subframe logic (see, e.g., [9, Sec. 9.4]). Therefore, S4.Grz is a cofinal subframe logic. Finally, it is well known that S4.Grzis a union S4-splitting (see, e.g., [8, Exm. 1.11]). Thus, S4.Grzis a unionK4-splitting.
• By Theorem 7.6, GL is notK4-stable, and it is well known thatGL is not a union K4 -splitting (see, e.g., [9, Exe. 9.13]). On the other hand, it is well known thatGLis a subframe logic (see, e.g., [9, Sec. 9.4]). Thus,GLis a cofinal subframe logic.
e.g., [5, Thm. 3.4.27]). By [9, Cor. 9.64], ⌧L is a union S4-splitting logic, hence a union
K4-splitting logic.
• It is easy to see that neither S4BTW3 norK4BTW3 is a subframe logic. It follows from [9, Sec. 9.4 and Cor. 9.64] that S4BTW3 is a cofinal subframe logic. Since K4BTW3=
S4BTW3+, it follows that K4BTW3 is a cofinal subframe logic. An adaptation of the proof of [9, Prop. 9.50] shows that K4BTW3 is not a union K4-splitting logic and
S4BTW3 is not a union S4-splitting logic. On the other hand, by Proposition 7.1,
S4BTW3isS4-stable, and by Proposition 7.2,K4BTW3isK4-stable.
References
[1] G. Bezhanishvili and N. Bezhanishvili. Canonical formulas for wK4.Rev. Symb. Log., 5(4):731–762, 2012. [2] G. Bezhanishvili and N. Bezhanishvili. Locally finite reducts of Heyting algebras and canonical formulas.Notre
Dame Journal of Formal Logic, 2016. To appear.
[3] G. Bezhanishvili, N. Bezhanishvili, and R. Iemho↵. Stable canonical rules.J. Symbolic Logic, 2016. To appear. [4] G. Bezhanishvili, N. Bezhanishvili, and J. Ilin. Cofinal stable logics. Submitted; available at:
http://www.illc.uva.nl/Research/Publications/Reports/PP-2015-08.text.pdf.
[5] N. Bezhanishvili.Lattices of Intermediate and Cylindric Modal Logics. PhD thesis, University of Amsterdam, 2006.
[6] P. Blackburn, M. de Rijke, and Y. Venema.Modal Logic. Cambridge University Press, 2001. [7] R. Burris and H. Sankappanavar.A Course in Universal Algebra. Springer, 1981.
[8] A. Chagrov, F. Wolter, and M. Zakharyaschev. Advanced modal logic. InHandbook of philosophical logic, Vol. 3, pages 83–266. Kluwer Acad. Publ., Dordrecht, 2001.
[9] A. Chagrov and M. Zakharyaschev.Modal Logic. The Clarendon Press, New York, 1997. [10] E. Jeˇr´abek. Canonical rules.J. Symbolic Logic, 74(4):1171–1205, 2009.
[11] M. Kracht.Tools and Techniques in Modal Logic. North-Holland Publishing Co., Amsterdam, 1999.
[12] M. Kracht. Modal consequence relations. In P. Blackburn, J. van Benthem, and F. Wolter, editors,Handbook of modal logic, pages 491–545. Elsevier, 2007.
[13] W. Rautenberg. Splitting lattices of logics.Arch. Math. Logik Grundlag., 20(3-4):155–159, 1980.
[14] V. V. Rybakov.Admissibility of Logical Inference Rules. North-Holland Publishing Co., Amsterdam, 1997. [15] G. Sambin. Subdirectly irreducible modal algebras and initial frames.Studia Logica, 62(2):269–282, 1999. [16] Y. Venema. A dual characterization of subdirectly irreducible BAOs.Studia Logica, 77(1):105–115, 2004. [17] Y. Venema. Algebras and coalgebras. In P. Blackburn, J. van Benthem, and F. Wolter, editors, Handbook of
modal logic, pages 331–426. Elsevier, 2007.
Guram Bezhanishvili: Department of Mathematical Sciences, New Mexico State University, Las Cruces NM 88003, [email protected]
Nick Bezhanishvili: Institute for Logic, Language and Computation, University of Amsterdam, P.O. Box 94242, 1090 GE Amsterdam, The Netherlands, [email protected]