Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
2007
The Manta Project: Conception, Implementation,
and Reflections on a Cable Array Robot and its
Interfaces
Brian Ballsun-Stanton
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
Recommended Citation
The
Manta
Project:
Conception,
Implementation,
and
Reflections
on a
Cable
Array
Robot
and
its Interfaces
By
Brian
Ballsun-stanton
Thesis
submitted
in
partial
fulfillment
of
the
requirements
for the
degree
of
Master
of
Science in information
Technology
Rochester institute
of
Technology
B.
Thomas
Golisano College
of
Computing
and
information
Sciences
Thesis Reproduction PermissIon Form
Rochester Institute of Technology
B. Thomas Golisano College
of
Computing and Information Sciences
Master of Science In Information Technology
The Manta Project:
Conception, Implementation, and Reflections on
a Cable Array Robot and Its Interfaces
I, Brian Ballsun-Stanton, hereby grant permission to the Wallace Library of the
Rochester Institute of Technology to reproduce my thesis in whole or in part.
Any reproduction must not be for commercial use or profit.
Rochester Institute of Technology
B. Thomas Golisano College
of
Computing and Information Sciences
Master of Science in Information Technology
Thesis Approval Form
Student Name: Brian P. Ballsun-Stanton
Thesis Title:
The Manta Project: Conception, Implementation,
and Reflections on a Cable Array Robot and its
Interfaces
Thesis Committee
Name
Signature
Date
Jonathan Schull
Prof. Jonathan Schull
Steve Jacobs
Prof. Steve Jacobs
Acknowledgements
Iwould like tothankJon
schuii,
DianneBills,
andSteven Jacobsandtherest ofthe informationTechnology
DepartmentatRochesterinstituteofTechnology.Copyright
2007 Brian Ballsun-Stanton
Table
of
Contents
Abstract
1
Introduction
1
Flying
aManta
withGesture
andController: An Exploration
ofCertain
Interfaces
in
Human-Robot
Interaction
3
1
Introduction
3
1.1
Three Human Robotic Interface
(HRI)
Conceptual
Axes
4
2
The Manta
and ourExplorations
6
2.1
Interface Explorations
withaP5 Glove
andCounter-Weight
Driven
Cable
Array
6
Interface Scheme One: from
Hand Position
to
Page
Position
7
Interface Scheme
Two:
from
Finger
Bends
to
Motor Vectors
8
2.2
Interface Explorations
with anXbox 360 Controller
andWinched
Cable
Array
10
Interface Scheme Three:
from
the
P5
Glove
to
anXbox
360
Controller
11
Interface Scheme
Four:
from
Motor
Control
to
Vector Control
12
3 Discussion
andFuture Research
13
Acknowledgements
15
References
15
Technical Discussion
ofthe
Manta Project
16
Four Motor Counterweight Manta
16
Counterweight Manta Mechanical Details
18
Counterweight Manta Hardware
andSoftware
Details
21
Three Motor Winched Manta
24
Winched Manta
Mechanical
Details
26
Winched Manta Hardware
andSoftware Details
29
Future Research
andConclusions
30
References
31
The Manta Project
-Thesis
Introduction
1
Abstract
We have
createdandflown
a cablearray
robotbased
flying
sculpture.This
sculp
ture,
in its
variousversions,
flew
in
both
Rochester,
New York
andLondon,
England.
This
thesis
both
exploresthe
construction ofthe
flying
sculpture and presentsa published
paper wherein anHuman-Robotic Interaction
design
spaceis
proposedto
facilitate discussion
of roboticinterfaces.
Introduction
"Well,
wouldn'tit
be
coolif
we couldfly
something
aroundthe
atrium?"With
those
words we embarked on an adventure ofinnovation
and creation.Our
goalevolved: we wanted
to
make a cablearray
robot which couldbe
suspendedin
arbitrary
spaces.A
cablearray
robotis
formed
by
running
a number of cables aroundthrough
pulleys mountedin
corners ofthe
room.By
attaching these
cablesto
a center
point,
andthen
tensioning
anduntensioning
them,
we can moveany
objectattached
to
the
centerpointanywhere withinthe
spacedefined
by
the
pulleys.In
ourcase,
wedecided
to
suspend afiberglass
sculpture of amanta-ray
from
the
center pointin
orderto
representthe
artistic vision ofswimming
through
the
invisible
seaof cyberspace.
The
Manta Project
was alsoan explorationofthe tools
andtechniques
of
Information
Technology
reappliedto
animplementation
ofa mechanical/electricalstructure.
The
artistic contextsurrounding the
mantais best described in
the
introduction
to
the
paper aboutthe
Manta's
Human-Robotic
Interfaces: "The
mantainstallation
was
intended to
expressthe
idea
that
modernlife is
increasingly
embeddedin
anunseen ocean of
information,
controlledby
barely
perceptible computer-controlled constraints.We
soughtto
capturethis
vision via anincongruously
graceful mantacomputer-con-The Manta Project
-Flying
aManta
withGesture
andController
2
trolled
fishing
lines. Projected
onto the
wings ofthe
manta wouldbe
web pages andother
digital
information
sniffedfrom
local
unsecured wirelessInternet traffic,
thus
revealing
the
omnipresentbut
invisible
sea of cyberspacethrough
which we all swim."This
"incongruously
graceful manta ray"was
the
product oftwo
majorhard
warerevisions,
countless softwareupdates,
andhours
of rapidprototyping
withK'Nex,
hot
glueguns,
fishing
line,
string,
andduct
tape.
This
thesis
is
organized aroundtwo
major components:the
paper submittedfor
Gesture
Workshop
2007
whichexplores, compares,
and contraststhe 4 interfaces
created
during
the
course ofthe
Manta Project
followed
by
atechnical
overview anddocumentation
of our specificimplementations
andtechniques.
The
paper exploresthe
human-robotic
interaction
(HRI)
implications
ofthe
mantaby
comparing
andcontrasting the
different interfaces
we usedduring
the
Manta's
creation withinthe
contextof anHRI design
spaceformed
by
three
axes: motormapping,
frame
ofreference,
andlocation. The
technical
overviewdocuments
the
basic infrastructure
ofthe
cable-array
robot as wellasthe
various"cute
tricks" we employed whileworking
onThe
Manta Project
-Flying
aManta
withGesture
andController
3
Flying
a
Manta
with
Gesture
and
Controller:
An
Exploration
of
Certain
Interfaces
in
Human-Robot
Interaction
By
Brian Ballsun-Stanton
andJon Schull
Abstract.Wedocumentand discussa number ofinterfaceexplorationsconducted while
building
acable-arrayrobotic sculpturein theformof afiberglass biomimeticflying
manta ray.Ourtwoprimaryinterfacedeviceswere a gesture sensing
EssentialReality
P5 glove and a Microsoft Xbox 360 game controller. Wealso offer a conceptual design spacecomprisingthreeaxes:mapping,frameofreference,andinterface location. This designspaceletsusdiscussand compare all of ourexplorationsand envision otherpotentially
interesting
interfaces.Keywords: Data
Glove,
EssentialReality
P5Glove,
GameControllers, Gesture,
GestureControl,Human-RobotInteraction, InformationVisualization,
InterfaceMappings,
Interfaces,Microsoft Xbox360, Robotics,Teleobservation1
introduction
Over
the
pastyear,
studentsandfaculty
atthe
Rochester Institute
ofTechnology
collaborated on a
cable-array
robotic1kinetic
sculpturein
the
form
of a manta
ray
(Fig.
1)
that
maneuveredthrough the
B.
Thomas Golisano College
ofComputing
andInformation
Sciences'three-story
atrium.By lengthening
andshortening
computer-controlled suspension
lines
operators could createthe
simulation ofthe
mantaswimming through the
air.The
mantainstallation
wasintended
to
expressthe
idea
that
modernlife is
increasingly
embeddedin
an unseen ocean ofinformation
[7],
controlledby barely
perceptible computer-controlled constraints.We
soughtto
capturethis
vision via anincongruously
graceful mantaray
flying
through
the
atrium underthe
control ofnearly transparent
computer-controlledfishing
lines.
Projected
onto the
wings ofthe
manta would
be
web pages and otherdigital information
sniffed[2]
from local
unse cured wirelessinternet
traffic,
thus revealing the
omnipresentbut invisible
sea of cyberspace[17]
through
which we all swim.This
paper willdiscuss
a number ofhuman-robotic
interface issues
[3],
[14]
that
arose
during
the
design,
construction,
andprogramming
ofthe
system.In
our1 For more information on cable array robots, see [6], [15] For a number of videos showing the manta at various locations, go to
The Manta Project
-Flying
aManta
withGesture
andController
4
designs,
we explored gesturesensing
[5], [9]
andjoystick driven
interfaces.
These
explorations allowed us
to
for
mulate a
potentially
usefuldesign
spacefor
the
investiga
tion
ofHRI
issues
comprised ofthree
conceptual axes:Motor
Mapping,
Frame
ofReference,
and
Location. This
paper willuse
the
design
spaceto
discuss
and compare our
interface
schemes and
to
illuminate
somepotentially
interesting
issues
and new
interfaces
for future
consideration. Fig. 1. Aview ofthekite-like Manta raysuspended from
computer-controlled
fishing
linesinthethree-story
atrium ofRochester Institute of Technology's B. Thomas Golisano College ofComputing
and Information Sciences. Themantaiscomprised offiberglassrods with atranslucentskin upon which we can projectdigital images. Becausetherods arejoined ina state ofdynamic tension,
they
flexandbend whenthelinesaremoved,producingalifelike swimmingmotion././
Three Human Robotic
interface
(HRl)
Conceptual
Axes
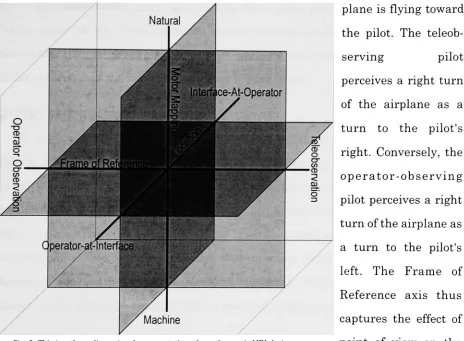
The Motor
Mapping
axis of our conceptualframework
(Fig.
2.)
has
two
poles: natural
(human-intuitive)
mapping
and mechanical(machine-informed)
mapping.A
puppeteer with multiple marionettes who controls
them using
difficult,
arcane,
andprecise
gestures,
constrainedby
the
kinematics
ofdangling
strings,
exemplifiesmachine-informed mapping.
In
contrast,
the
operator of ahand
puppetbenefits from
a much more natural
mapping
in
which eachfinger
moves a correlatedbody
partin
a
direct
andintuitive
manner[12]. The Motor
Mapping
axisthus
capturesthe
rangeof cognitive effort required
to
translate
operatorintentions into
machine- executableinstructions.
As
illustrated in
Figure
2,
the
two
poles ofthe
Frame
ofReference
axis are oper [image:10.532.34.503.90.358.2]The Manta
Project
Flying
aManta
withGesture
andController
5
reference
is
a radio-controlled plane whose pilotsimply
controls and observesthe
plane
from
the
ground.Conversely,
ateleobserved
frame
of referenceis
a pilot whoadopts
the
plane's point of view withthe
aidfrom
a wireless camera mountedin
the
plane'scockpit.'
There is
apronounced
difference
in
frames
of reference whenthe
airplane
is
flying
toward
the
pilot.The
teleob-serving
pilotperceives a right
turn
of
the
airplane as aturn
to
the
pilot'sright.
Conversely,
the
operator -observing
pilot perceives a right
turn
ofthe
airplane asa
turn
to
the
pilot'sleft.
The
Frame
ofReference
axisthus
captures
the
effect ofpoint of view on
the
interface.
The
third
orthogonal axis of our
HRI
Fig. 2. This isathree-dimensionalrepresentationof ourthree-axisHRI designspace.Eachaxis variesbetweenthe twospecified poles andisorthogonalto theothers.The firstaxis,MotorMapping,variesbetweentwopoles: natural and mechanical.Thesec ond axis, Frame of Reference, varies between operator observation and
teleobservation. The third axis, Location, varies between operator-at-interface and interface-at-operator.
design
space,
Location,
(Fig.
2.)
goesfrom
operator-at-interface,
where an operatormust go
to the
interface
to
operatethe
device,
to
interface-at-operator,
wherethe
operator's physical
location is
relatively
unconstrained.A
traditional
airplaneis
operator-at-interface:
the
pilot mustbe
in
the
cockpit.In
contrast,
anunmannedaer-1 Thisisnottobeconfused withfirst-personvs.third-personperceptionasdiscussedin thecomputergamingliterature[4],[13]. Fromourpointofview,
[image:11.532.39.503.172.513.2]The Manta Project
Flying
aManta
withGesture
andController
6
ial
vehicle controlledby
afree-ranging
foot
soldierin
the
field is
interface-at-opera-tor.
This
axis capturesthe
effect of operatorfreedom
onthe
interface.
A
variety
ofinterface
control schemes canthus
be located
withinthe
three-dimensional
space ofFig.
2.
We
will suggestbelow
that
some regions withinthis
space are
considerably
moreuser-friendly
than
otherregions,
andthat there
are"sweet
spots"in
whichthe
operator's actionstake
onthe
character ofnuanced gesture
ratherthan
gross manipulation.In
these spots, the
device becomes
anextensionof
the
actor ratherthan merely the
object ofhis
actions.12 The
Manta
and our
Explorations
In
the
process ofworking
onthe project,
some additionalthemes
aroseregarding
the
emerging
role ofthe
interaction designer
[11],
andthe
nature ofthe
designer's
creative processes.
The interaction
designer's
mission,
we would nowsuggest,
is
to
help develop
"natural
habitats"in
whichpervasive,
ubiquitous and ambient computing [1]
allowshumans
to
expresstheir
intentions
and achievetheir
goals withminimal effort and maximal efficacy.
We have
also cometo
seethe
interaction
designers'
creative process as
exploratory
movementthrough
a multidimensionaldesign
spacein
search ofregions where man and machine cancomfortably
coexist.2.1
Interface
Explorations
with a
P5 Glove
and
Counter-Weight Driven
Cable
Array
Our
first
cablearray
robot'sinfrastructure
was a counterweightbased four line
system
in
whichfour
computer-controlled motors and pulleys reeledfishing
lines
in
and outto
alterthe
robot's position under control of anEssential
Reality
P5 data
glove2.Within
this
arrangement,
we willdiscuss
two
interfacing
schemes usedto
control the
sculpture andthe
projections.First,
we will explore a systemintended
to
1ThephilosopherMartinHeidegger[10]hascreatedtheconceptsofpresent-at-hand andready-to-hand.Theseconcepts explorethedistinction between
toolsbecomingan extension of ourmindversusthedirectobjectof our actions.
The Manta Project
Flying
aManta
withGesture
andController
7
control
the
digital
imagery
projected onto the
manta's wings.Then
we willdiscuss
ourfirst
cable-array
control scheme.interface
Scheme One:
from
Hand Position
to
Page
Position
By
extracting
data from
an ambientWi-Fi
network,
we were ableto
create alarge dynamic
virtual mosaicin
the
form
of a9
x9
matrix of web pages.By
continuously projecting
a small part ofthat
mosaic ontothe
wings ofthe
flying
manta,
we soughtto
createthe
illusion
that the
manta wasflying
through
a continuous sea ofweb
pages,
revealing them
briefly
asit
passed.We
wanted ourfirst
interfacing
scheme
to
controlthe
drift
ofthis
"sea
ofinformation"independently
ofthe
movement of
the
mantaitself.
To
this
end,
operators usedaP5 Data
Glove
to
pan acrossthe
web page mosaic.The interface
software sampledthe
glove's positionevery
five
seconds
in
an attemptto
matchhand location
to
a web page.A
naturalmapping
ofhand-position
to
page-position made great sensein
theory
[12],
but
in
practice,
it
provedunworkable.The P5's
sensorbar
did
notreliably
detect
the
LEDs
embeddedin
the
P5
glove(these
LEDs
were used as a perceivable positionindicator
by
the
sensorbar),
andthis
caused rapid anddisruptive
shiftsin
the
visualdisplay.
The P5 handled
the
failure in detection
poorly,
resulting
in
frequent
unintended
cross-screenjumps
ofthe
browser
window'sviewing
area(viewport). Less
drastic,
but
morefrequent jitter
movements were alsoproblematic.We
tried to
compensate
for
this
jitter
errorby
using
error correctionalgorithms,
including
Richard
Hachem's[8]
implementation
of aKalman
filter[16]
for
P5
Glove location
data,
but
these
filters
introduced
unacceptabletime
delays
withoutany
significantdecrease
in
jitter
error.A
second source of error wasfar
moreinsidious.
Again,
due
to
the
poorsensing
ofthe
LEDs
onthe
glove,
movementaway
from
the
center ofthe
sensorbar
caused unpredictableskewing
effects,
whichin
turn
causedintuitive
movementsto
inter-The Manta Project
-Flying
aManta
withGesture
andController
8
preted a movement
up
as a movementaway
from
the
sensorplatform,
andthe
correlation between
hand
motions and page motions varied withdistance from
the
sensortower.
In
terms
ofthe
design
spaceillustrated
in
Fig.
2,
this
interface
schemefits
in
the
forward
upper right octant(referring
to
one ofthe
eight spacesin
the cube,
just
asquadrant refers
to
a square).The
Mapping
was natural(albeit
errorprone)
in
that
the
display
echoedthe
movement ofthe
glove.The
Frame
ofReference
wasteleob-served,
since all ofthe
action washappening
in
an electronic space.Finally,
the
Location
was(unfortunately)
operator atinterface:
the
systemfailed
if
we movedmore
than
afew feet from
the
sensortower
andcontrolling
computer.interface
Scheme
Two: from Finger Bends to Motor Vectors
In
the
secondinterface
scheme,
we choseto
forgo
naturalmapping
in
favor
of arelatively
easy-to-implement machine-orientedlinkage
based
onbend
sensorsin
the
fingers
ofthe
P5
glove.As
the
operator curled and extendedhis
fingers,
the
interface
software sent commands
to the
motorsto
reelout, stop,
or reelin.
By
combining
these
finger
manipulations,
the
operatorcould
fly
the
manta,
after afashion.
As
seen
in
Figs.
3a
and3b,
very
specific gestures
were requiredto
approximate move ment
in
one ofthe
eight
directions
by
Figs. 3a(left)
and3b(right). Operatorsused thestylizedinstructionsheet(3a)
as aguideto themanta'sflightcommandswhile usingthe
finger-sensing
interface.TheThe Manta Project
-Flying
aManta
withGesture
andController
9
putting
each motorinto
one ofits
three
states.The
resulting
movements ofthe
manta
createdthe
illusion
offlight:
complete withflapping
wings.The
problems encountered withthis
scheme stemmedfrom
the
non-intuitivemapping
as well asfrom
electro-mechanicalissues: because
ofidiosyncrasies
ofeachmotor and
winch,
the
speeds with whichlines
reeledin
and outfrequently
varied.With
the
fingers
in
afixed
configuration,
the
manta wouldtypically
drift
away
from
the
desired direction
oftravel.
Since
this
schemedid
notinclude
variable speed control,
corrective actionsby
the
operator produced sawtooth
motionsin
whichthe
mantalurched
dramatically
but
drunkenly
through
athree-story
atrium abovethe
heads
ofonlookers.Ironically,
the
visual effect ofthis
performance wasconsiderably
more gracefulthan this
description
mightlead
oneto
expect.Partly
by design,
partly through trial
and
error,
the
manta'sfiberglass frame flexed
andbent
gracefully
in
responseto
jerky
changesin
motorspeed,
producing
asurprisingly
good simulation ofa mantaflapping
its
way through
aninvisible
medium.Our
jerky
but
effective pattern ofdesign
evolutionbecame
clearhere
too:
somewhatlike
the
manta,
we werelurching
from
one cornerofourdesign
spaceto
another,
in
anongoing
attemptto
find
anintu
itive
control schemefor
the
operator and acorresponding
natural pattern ofmovement
in
the
manta.This interface
occupies alocation in
the
front bottom
left
octant ofthe
design
space shown
in Fig. 2. Our
finger-sensing
interface
was machine mapped.Despite
the possibility
of a naturalmapping
from
ourfirst
scheme,
we chose machinemap
ping
for
a quicker andless
error proneimplementation.
In
general,
during
development,
onethe
fastest
routesto
mechanicalfunctionality
is
by
conforming
to
render-The Manta Project
-Flying
aManta
withGesture
andController
10
ing
mootthe
lack
of remote control.The
debugging
requirements makeit
fully
operator observed and operator-at-interface.
2.2 interface
Explorations
with an
Xbox 360 Controller
ana
Winched
Cable
Array
While
audiences'appreciatedour
early
performances,
ourfirst
physical arrange ment of motors andlines
had
no remote controlfunctionality,
sufferedfrom
frequently
tangled
lines,
and required constant attention.For
this reason,
andbecause
the
P5
sensors requiredthat
westay
withinafew feet
ofthe
sensorplatform,
it
wasvery
operator-at-interface.We
therefore
decided
to
redesign most aspects ofthe
system.We
replacedthe
four
counterweighted motors withthree
more powerful motorsdesigned
to
winchthe
lines
ontospools,
all within atwo-chambered
enclosureintended
to
reducethe
probability
andviciousness of entan
glements.
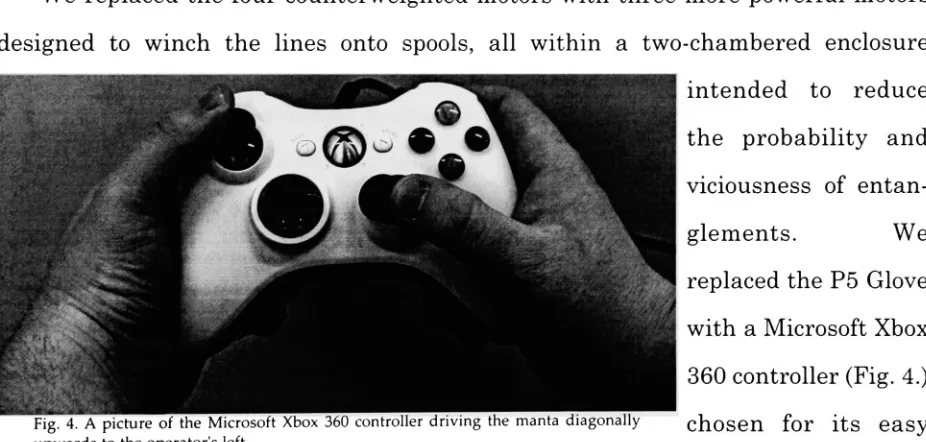
We
replaced
the
P5
Glove
with aMicrosoft Xbox
360
controller(Fig.
4.)
Fig.4.Apicture ofthe Microsoft Xbox 360controller
driving
themantadiagonally
chosen
for
its
easy
upwardstotheoperator'sleft.computer connectivity.
We
alsodeveloped
a client/server architecturefor
our soft warethat
increased
flexibility
andmodularity
ofdesign.
With
this
setup,
we experimented withtwo
moreinterfacing
schemes.In
onescheme, we adopted amachine-mapped
interface
metaphor similarto the
one wehad
previously
used:three
axes ofjoystick
movement(up-down
on onejoystick,
and [image:16.532.36.499.338.559.2]The Manta Project
-Flying
aManta
withGesture
andController
11
scheme,
the mapping
wasconsiderably
more natural since movements ofthe
rightjoystick
madethe
manta movealong the
horizontal
plane andvertical movementsofthe
left
joystick
controlledthe
manta's altitude.We
also used otherbuttons
onthe
controller
to
control other aspects ofthe
software.interface Scheme Three: from the P5 Glove to
an
Xbox
360
Controller
Replacing
finger-bends
withjoystick
movements andimplementing
variablemotor speed
controls,
gavethis
interface
scheme much more nuancedcontrol ofthe
manta's speeds.
On
the
otherhand,
the
arrangementstill requiredthat the
operatorcontinuously
translate
desired
changesin
the
manta'slocation
to
desired
changesin
line
length,
andtranslate
changesin
direction
to
changesin
winchspeed.Due
to
the
shift
from four lines
to
three,
this
control scheme wasvirtually
unusable.While
the
interface
was moreergonomic,
the
mappingsnow requiredthe
operatorto
input
frac
tional
speeds:something
almostimpossible
to
do
on a real-timebasis.
Much
more successful was our adoption ofthe
client/server architecture anduseof
the
more portableXbox 360
controller.Now,
the
operator could movearound,
con nectedwirelessly to the
servercontrolling the
motors.This
allowedthe
operatorto
view
the
manta andthe
scenefrom
variousperspectives.While
true teleobservation
escaped us
(as
the
control scheme could not orientitself
to the
manta'sframe
of reference),
wewere nolonger
tied
to the
motors asin
previous schemes.This interface
scheme canbe
located
firmly
atthe
center ofthe
bottom
four
octants.
While
this
wasfully
machinemapped,
asdiscussed
above,
the
increased
freedom
ofthe
client/server architecture allowed usto
divorce
ourselvesfrom
being
completely
operatorobserved andoperator-at-interface.While it
wasnotfully
teleob-served,it
was much easierto "think
oneselfinto
the
Manta's
Frame
ofReference.
While
it
was notfully
interface-at-operator,
the
increased
freedom
affordedby
the
The Manta Project
-Flying
aManta
withGesture
andController
12
better
tangle-proofing
meantthat the
operator'sLocation
wasconsiderably
less
operator-at-interface than
before.
At
heart,
whilethese
changes reducedthe
amount ofcontrol over
the manta,
they
increased
the
operator's sense ofcontrol.Fortunately,
this
interface
explorationleads
usto
afinal interface
schemethat
allowedthe
operator
to think
about manta movementsratherthan
motor movements.interface Scheme
Four: from
Motor Control
to Vector Control
Our last interface
scheme allowed usto
movefrom
machine-mappedthumb
movements
to naturally
mapped manipulations:thumb
movementsthat
translated
intuitively
into
manta movements and corresponded wellwiththe
operator's naturalperception of manta movements.
By
mapping the three
axes ofjoystick
movement(Fig
4)
to the three
spatial axes ofthe
rectangular atrium andby
mapping
degree
ofjoystick deflection
to the
speed ofthe
manta,
it
became
possibleto
usethumb
movements
that
made sense.For
example,
to
movethe
mantaaway
orto
the right,
the
operator could push
his
orher
rightthumb away
orto the
right.Of
course,
doing
sorequired
that the
computer performthe trigonometric
computationsto
convertthese
gestures
into
changing
ratesofwinch rotationfor
the
three
motors.That
however,
is
precisely
what gesture recognition systems andhuman-oriented
interfaces
mustdo:
allow
human
operatorsto
expressintentions
withintuitive
movements,
andto
getintuitive
feedback
from
those
movements.Indeed,
whilethis
last
schemewasfar from
perfect,
wefound
that
we could overcome a
variety
of sinsby
the
combination ofintuitive
movement andintuitively
perceived
feedback. For
example,
while we were stillcoping
withmechanicalidiosyn
crasies as well as with variations
in friction from
oneline
to
another andfrom
onemoment
to the
next,
compensating
for
these
variations wasrelatively easy
andunconscious on
the
part ofthe
operator.Thus,
much as an automobiledriver
pusheshead-The
Manta Project
-Flying
aManta
withGesture
andController
13
winds, the
manta operatorsimply
pushesthe
appropriatejoystick
moreorless
force
fully
in
the
intended
direction
to
compensatefor
mechanical and otherfluctuations
in
the
system.This
latest
scheme was a major advance overthe
priorinterface because it
allowed
the
operatorto
gesture"I
wantit
to
gothat
way,"with more or
less
vigor.The
schemeis in
the
middle ofthe
top
four
octants,
because
it
adds arelatively
natural
mapping
to
the
moderately
operator-observed andmoderately
interface-at-operator
character ofthe
previous scheme.With
a wirelessXbox
360
controller,
or a wirelessWii
remotecontroller,
we expectto
move evenfarther
in
the
interface-at-operator direction.
3 Discussion
and
Future Research
Several
general observations seem pertinent.We
suspectthat
some quadrantsin
the
design
space are morepromising
when usedin
certaintypes
ofprojects.In
performative
robotics,
our own experienceleads
usto
speculatethat
as aninterface
approaches
the
natural andinterface-at-operator
poles,
the
operator willfeel
morelike
a performerperforming
than
anoperatorcontrolling,
andthe
robotic systemwillfeel
morelike
an extension ofthe
human body. We
canreport,
for
example,
that
dur
ing
onedeployment
[13],
the
operatorhad
occasionto
movethe
mantadown floor
level
andhave
it interact
withhuman
dancers. Although
the
operator wastwenty
feet
way
from
the
dance
floor,
the
experience ofinteracting
withthe
otherdancers
wasmore salient
than the
experience ofinteracting
withthe
machinery
orthe
mantaitself.
With
regardto
ourframework,
we should acknowledgethat
intuitiveness
may
be
in
the
eyeofthe
beholder,
andthat
is
may
not alwaysbe
obviousin
advance.In
addition,
there may
wellbe
additional orthogonaldimensions
beyond
the three
wehave
The Manta Project
Flying
aManta
withGesture
andController
14
be
usefulfor
exploring
anddiscussing
alternative schemes - as well asfor
creating
new ones.
For
example,
it
wasonly
when we envisioned afully
interface-at-operator
interface
that
webegan
thinking
about a performance scenarioin
which an operatorwouldperform on
the
dance floor
withthe
mantathey
were controlling.We
should also notethat
we are stillfar from
realizing
ourideal
visual performance.
Thumb
twitching
whiletethered to
a computeris
likely
to
be,
andto
feel,
less
expressive of
the
performer'sintentions
than
armwaving
andbody
swaying
whileroaming
freely. We intend
to
explorethis
questionusing
a wirelessNintendo
Wii
Remote
or aGyration Air
Mouse,
both
of which promise anatural,
interface-at-oper
ator experience
that
shouldbe
as reliable(within
receiverrange)
asthe
Microsoft
Xbox
360
controller.Finally,
we wouldlike
to
defend
explicitly the
propositionthat
amantaray
danc
ing
at adisco
(and
other socio-technical scenarios notusually
encounteredin
engineering
labs)
provides aremarkably
goodopportunity
for
exploring
human-com
puter gestural
interaction
andfor
discovering
novelengineering
challenges.For
hundreds
ofthousands
ofyears,
living
creatureshave been
interacting
viagesture-based
communication.This
is
atime-honored
working
model with muchto
recommend
it.
The
nextcentury
willdistinguish itself
by
the
emergence ofnon-biological robotsand
ambient,
pervasivecomputing
infrastructures.
These
emergenttechnologies
areincreasingly
going to
be
a significant part ofthe
human
environment.We
believe
that
engineers,
interaction
designers,
andtheir
clients willhave
more success(and
fun)
if
they
moveaway
from
machine-constrained andhuman-constraining
controlschemes and strive
to
study, emulate,
simulate, and situatetheir
workin
what people
do
naturally.If
we can get arobotic mantato
dance,
andto
be
welcome at aparty,
we will
have
createdsomething that
is
strange,
yetintriguing
andsocially
empowerThe Manta Project
Flying
aManta
withGesture
andController
15
Acknowledgements
We
wouldlike
to
thank
Dianne
Bills,
Steven
Jacobs,
andthe
Information
Technology
Department's
Innovation
andInformation
class.Furthermore,
wewouldlike
to thank
the
Golisano College
ofComputing
andInformation Sciences
aswell asthe
First International Conference
onDigital Live Art for
allowing
usto
fly
ourmanta
in
their
spaces.Finally,
we wouldlike
to thank the
Department
ofPlanning
and
Natural
Resources,
Division
ofFish
andWildlife,
ofthe
Virgin Islands
for
their
line
drawing
of aManta
Ray,
usedhere
with permission.References
1.Abowd, G.D.,&Mynatt,E. D.:
Charting
Past, Present,andFuture ResearchinUbiquitous Computing.ACM Trans. Comput.-Hum.Interact.,7(2000) 29-582.Ansari, S, Rajeev,S.G., Chandrashekar,H.S.: PacketSniffing: A Brief Introduction.Potentials,IEEE, 21(2002)17-19;17-19
3.Benko, HIshak,E.W.,Feiner,S.:Cross-Dimensional GesturalInteraction Techniquesfor Hybrid ImmersiveEnvironments,vr,00(2005)209 4.BruceThomas,BenClose,JohnDonoghueet al.:FirstPerson Indoor/OutdoorAugmentedRealityApplication: ARQuake. PersonalandUbiquitous Computing,V6(2002)75-86
5.Chalhoub,N. G.:Controlof aLeadscrewDrivenFlexible Robot Arm.(1986)
6.German,J.J.,Jablokow,K.W., Cannon,D. J.: TheCableArrayRobot:TheoryandExperiment. 3(2001)2804-2810vol.3;2804-2810vol.3 7.Gershon, N.,Eick,S.G., Card,S.: Information Visualization. IEEE Comput.Graphics Appl.,1729-31
8.Hachem,R.: KalmanFilteringforP5.
9.Hasanuzzaman, M, Zhang, T., Ampornaramveth,V.et al.:Gesture-Based Human-RobotInteractionusingaKnowledge-Based Software Platform. Industrial Robot, 33(2006)37-37-49
10.Heidegger,M.:Beingandtime.Harper &Row, (1962)
11. JanO. BorchersER-:A Pattern ApproachtoInteraction Design. Al &Society,V15(2001)359-376 12.Norman,D.: Thedesignofeverydaythings.Doubleday, (1990)
13.Ryan,M.: BeyondMythandMetaphor- theCaseofNarrative inDigital Media.GameStudies:Theinternational JournalofComputerGame
Research,1(2001)
14.StefanWaldherr,RoseliRomero,Sebastian Thrun: AGestureBased InterfaceforHuman-Robot Interaction. AutonomousRobots,V9(2000)151-173 15.Usher, K.,Winstanley,G.,Carnie,R.: Air Vehicle Simulator: An ApplicationforaCableArrayRobot.(2005) 2241-2246;2241-2246
16.Welch,G.,&Bishop, G.:The Kalman Filter.
The Manta Project
-Technical Discussion
of theManta Project
16
Technical
Discussion
of
the
Manta
Project
While
the
paper presented above exploredthe
relative merits ofthe
variousinterfaces
we constructed overthe
course ofthe
mantaproject,
attention must alsobe
paidto the
technical
aspects ofthe
Manta.
In
the
following
section,
atechnical
his
tory
ofthe
manta andits
construction willbe
provided.Four Motor Counterweight Manta
This
first
manta wasthe
creation of a number ofindividuals
from
the
2006
spring
quarter'sInnovation
andInvention
class,
afew
interested
members ofthe
local
robotics club and afew
local
artists.The basic
conceptinforming
this
versionwas simple: we wanted our motors
to
be
ableto
reel and unreellines
so asto
positionourobject anywhere within
the
bounds
ofthe
lines.
However,
we wereworking
undera number of
limitations. Our
two
major mechanicallimitations,
andtheir
solution,
were
found
in
our motors and alack
ofknown
sensing
techniques.
We
unfortunately
had
far
moretroubles
withthe
hardware
and software.Our
majorchallengesin
this
version centered around
the
Essential
Reality
P5
Glove
andinterfacing
withthe
phidgets and victormotor controllers.
The
center point of our robotic system wasthe
fiberglass
mantaRay,
which,
due
to
aninnovative
jointing
systemusing
using
K'Nex
andhot
glue,
was ableto
flex
and
bend
withsurprising
realism.According
adis
cussion with
to
K'Nex
Industries
Customer
Support,
K'Nex
are:"...
a plastic constructiontoy
productof rods and connectors
that
fit
together to
make
3D
shapes."
(K'Nex
2007)
The
fiberglass
manta
had
three
major sections:two
wings and aFigure 1. A fTNex connector and fiber- . T^ . .
r J j. r
gifss rods
forming
a wing-tip. spine.Each
wing
wasformed
using
a system ofThe Manta Project
-Technical Discussion
of theManta
Project
17
their
joints,
were placed undertension to
produce apleasing
wing-like shape.The
fiberglass/K'Nex
hybrid
also allowed usto rapidly
prototypeManta
shapes as eachfiberglass
rod couldbe
arbitrarily
manipulatedwithouteffecting
the
whole structure.Two
ofthese
wingsjoined
together
with asupporting
arched spineto
provide anattachmentpoints
for
the
cable array.The
underside ofthe
manta was covered witha
translucent
andlightweight
plastic sheetto
provide a skin.Our
original plans wereto
project assorteddigital images
ontothis
skin so asto
evokethe
sea of cyberspacemetaphor mentioned above.
The
spine'sattachment point was
formed
by
still moreK'Nex hot
gluedinto
place,
withthe
additionof weighted washers
for
improved
maneuverability.
The
use ofK'Nex in
this
instance
allowed
for
each attachment anddetach
ment.
Here,
the
quick attachmentmechanism connected
to
a circularK'Nex
disk
with one ofthe
four
high-test
fishing
lines
attachedequally
aroundits
circumference.
These lines
ranto
four
points aroundthe
Golisano
collegeatrium,
spaced so asto
define
the
largest
possible rectangle giventhe
space.Smooth
enamel rings were usedin
lieu
of pulleyshere,
to
constrainourfishing
lines
to their
desired
paths.These four
lines
were routed aroundthe
corners ofthe
atriumto
allowthem
to
converge on ourmotors.
Each
line
was connectedto
its
associated motorby
winding
it approximately
three times
around apulley
screwedto the
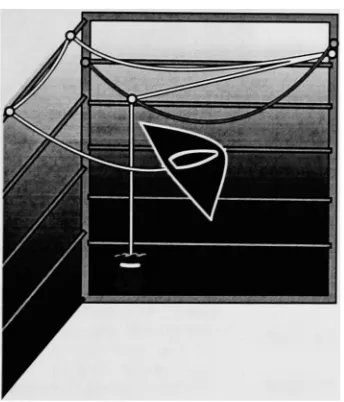
motor's axle.This
winding
constituted amajor point of
failure
in
this
version,
sinceany momentary
lapse
oftension
wouldFigure2.Illustrationof one ofthefour lines form
ing
thecable-array.In thisillustration, the line isroutedfromtheManta alongthebalconies,across theatriumproper,andthentothecounterweight.
Thecounterweights wereheldviaa separateline
stretched across the atrium. Illustration
by
CatherineLee,used withpermission. [image:23.532.57.229.250.451.2]The Manta Project
Technical
Discussion
of theManta
Project
18
From
here,
the
lines
were routedthrough
more pulleysto
four
hanging
counterweights.
(Figure
2)
The
motors were controlledthrough
four Victor
883
Servo-to-DC
motor controllers. Three large
powerbricks
were gangedtogether
and routedto
these
four
motor controllers.
Each
controller received servoTTL
commands
from
aPhidgetServo device. This device
took
USB
input from
the
computer andtranslated
it into
the
appropriate
TTL
signalfor
each motor.Signals
were generated
through
aJava
programexpressly
writtenfor
the
purpose.
The
program's main source ofinput
was anEssential
Reality
P5 Glove. The
entireP5
Glove
systemwas a glove connected
to
a sensorbar
connectedto the
host
computer.(Figure
3)
This
system was ableto
detect
the
approximateloca
tion
and rotation ofthe
glove as well asfinger bends. As
will
be discussed later
the
rotation andlocation
sensing
capabilities
left
muchto
be
desired.
Each
finger
onthe
glove was mapped
to
each ofthe
four
motors whilethe thumb
was asafety all-stop
switch.
Each
finger/motor
combinationhad
three
states: allstop,
forwards
full
andbackwards
full.
By
combining
chords ofthese combinations,
the
lines
couldbe
reeledin
and reeledout,
resulting
in
movementin
the
approximatedirection
ofthe
operator's
intent.
Figure 3. P5 GloveandSensor Bar. Theglove isabletosense it's position and rotation rela tive to the sensor bar via infraredcamerasinthesensor bar. Through the Glove'scon nection to the sensor bar, the glove receives power and transmitsfinger bendandbut ton-pressinformation.
Counterweight
Manta
Mechanical Details
After
defining
ourproblem,
much of ourinitial
design
methodologies consisted ofan
iterative
process where we createdvery
quick prototypeswithK'Nex,
pulleys,
andThe Manta Project
-Technical
Discussion
of theManta Project
19
success,
considering
ourlow initial
knowledge
ofthe
engineering
necessary to
complete
the
task.
In
this regard,
wehad
three
major mechanical phases:crafting,
stringing,
anddebugging
the
installation.
Our
crafting
phaseinvolved
evolving
afunctional
manta sculpture and afunc
tional
motor assembly.We
werelooking
for
a manta sculpturethat
waseasy
to craft,
easy to
changed,
andhad
the
desired biomimetic
flexing
qualities suggestedby
the
fiberglass
rods.The initial
prototypes useddrilled
pokerchips,
washers, and otherad-hoc
bits
ofmiscellany that
seemed appropriatefor
the
task.
Once
abox
ofK'Nex
was
found
at alocal
garagesale,
the
plastic gears and rodsimmediately
suggested adesign
methodology.By
tipping
eachfiberglass
rod with part of aK'Nex
axle(Figure
1),
we were ableto
utilizethe
K'Nex
prefabricated gearsj
to
great success.Many
experimentsfollowed,
exploring
j
the
impacts
ofsize, reinforcement,
rodredundancy
andweight on
the
manta'sbiomimetic
characteristics.Once
j
an approximate
design
wasfound,
further
experimentsonskinning
materialsfollowed.
By hot-gluing
sets ofK'Nex
gears
together,
we were also ableto
create asimple,
yet !stable spine
that
was compatible withthe
K'Nex
tipped
fiberglass
ofthe
wings(Figure
4).
Our
motor assemblies also wentthrough
a numberofrapid
prototyping
revisions.Here,
the
many
revisionswere
to
find
solutionsto two
major problems:the
motors weretoo
weakto
lift
the
manta at
any
acceptable speed and whenstopped,
the
axlesdid
notlock in
place,
allowing the
mantato
drift
slowly
back down
asits
weight causedthe
motorto
unreel.
After
many
unsuccessfultrials,
wefinally
discovered
that
a counterweightarrangement.
This
arrangement solvedboth
of ourproblems: asthe
force
requiredto
move
the
somewhatbalanced
fishing
line
was muchless,
we were ableto
achieve Figure4.Apicture ofthe threewhitegears with external con
nectors which allowed for
wing edge connection points and fora double-spine tobe held solidly
by
cementingfiberglassrods intheintersti tialspacesinsidethegear with
The Manta Project
-Technical Discussion
of theManta Project
20
acceptable
speeds withthe test
motor.Since
the
manta and counterweightbalanced
each other
out, the
lack
of axlelocking
did
not cause usany
problems.A
majorflaw
ofthis
system wasits
response whenthe
amount oftension
in
the
system changed.
An
unfortunate characteristic ofthe
fishing
line
system emerged:all of our
pulleys,
enamelrings,
and counterweightsfouled
up
whenthe
entire system
was not undertension
at alltimes.
Here
the
same rapidprototyping
process asabove came
into
play
as webuilt
elaborate constructionsin
attemptsto
solvethe
ten
sion problem once and
for
all.While
selection pressure wasfierce,
wedid
manageto
arrive at a
design
which,
while stillrequiring
tension,
had
a minimal number ofpoints of
failure
and was somewhattolerant
of slightlapses
oftension.
The
enamelrings,
whilecommendably
low-friction,
were notfrictionless.
As
such, the
high
number
ofroutingsintroduced
a certain amount of"give"in
the
system.This
"give"
was
most
readily
apparent whenany
motorswiftly
changeddirection. As
the pulley
spun,
the three
loops
that normally
securedthe
line
to the
motor'spulley
widenedin
diam
eter,
quickly exceeding the
lip
ofthe
pulley.When
tension
reasserteditself,
causedusually
by
the changing
ofthe
direction
of mantatravel,
these
loops
wouldsuddenly
tighten
onthe
axleconnecting the pulley to
the
motor.Careful
workby
the
operatorwould
the
be
necessary
to
untanglethe
line.
Curiously,
we alsohad difficulties
whenthe
lines
wereoverly
tense.
K'Nex,
being
cheap, simple,
and non-scientific productsformed
out ofanCelcon
acetal copolymerproduced
by
Ticona
(Glickman
et.al.,
2006)
easily
deformed
due
to
stressesin
the
fishing
line. In
oneinstance,
adeep
groove was cut as apulley
spun against anextremely taut
line
causedby
astuck counterweight.In
this version,
whilethe
counterweights
wereclearly
necessary,
they
werepoorly
balanced
againsteach other andof
the
weight ofthe
manta.This
poorbalancing
actfurther
complicatedthe
design,
adding
errors and additionalfriction.
The
counterweights and enamel pulleys alsoThe
Manta Project
Technical Discussion
of theManta Project
21
and each counterweight
had
to
be
situatedin
an out ofthe way
spot withlarge
vertical
clearance.Counterweight
Manta Hardware
and
Software Details
Programming
the
software andconfiguring
the
hardware
that
wouldsupportthe
webofcables presented us with an
interesting
set ofchallenges:interfacing
withthe
motors and
getting
consistentinformation
out of ourEssential
Reality
P5
Glove,
amotion
sensing
glove wornonthe
righthand
and connectedto the
computerthrough
an
USB-enabled
attached sensorbar.
After
some research anddiscussions
with our roboticsconsultants,
the
decision
to
usethe
Victor
883
Servo-to-DC
motor controldevices
was easy.According
to
Innovation
First,
the
Victor
883's
manufacturer:"The
"Victor"is
an electric motorspeedcontroller.
It is
usedto vary the
speed of anelectric motorin
asmoothprogression anywhere
from full forward
to
off(neutral)
to
full
reverse.You
connect yourbattery
to
one side ofthe
Victor,
and yourmotorto the
other side.Then,
using
pulsewidth modulation signals plugged
into
the
input
youcan controlthe
speed anddirec
tion
ofthe
motor."(Innovation
First,
2007)
The
computer-to-Victorinterface
had
many
possible solutions.We
werefaced
withtwo
choices:using
aUSB-driven
Phidget,
orusing
a serial portdriven
device
that
performedthe
samefunctions.
Despite
extensive researchimplementing
serial communications with avariety
ofdevices,
our robotics consultantsfailed
to
deliver
a customcircuitfrom
whichto
control the
motors.Phidgets,
producedby
Phidgets
Inc
are:"...
aneasy to
use set ofbuilding
blocks
for
low
costsensing
and controlfrom
yourPC.
Using
the
Universal
Serial Bus
(USB)
asthe
basis
for
allPhidgets,
the complexity
is
managedbehind
aneasy to
use and robustApplication
Programming
Interface
(API)."
(Phidgets, 2007)
Faced
withanimpending deadline,
wethen
choseto
usethe
PhidgetServo,
whichsuit-The Manta Project
-Technical Discussion
of theManta Project
22
able
for
driving
servo motors.We
alsochose,
atthat
time,
to
attemptto
connect sensors
to
ourfishing
line.
A
number ofsensing
methodologies were
tested.
Our final
sensing
attemptinvolved
passing the
fishing
line
running
past each motorto
a customwheel,
groundaway along
one side.(Figure
5)
This
asymmetrical wheelthen,
whenthe
fishing
line
wasrun past an attached
pulley,
would rotatecausing two
snap
action switchesto toggle.
The
output ofthese
eventswas sent
to
aPhidgetIO
board,
producedby
the
samecompany
above which provided a computerized sourcefor
detecting
basic
analog
anddigital input.
However,
this
sensing strategy
wasdefeated due
to
alack
of significanttemporal
resolutionby
the
PhidgetIO
board,
it
notbeing
capable of
registering the
hundreds
of events(as
eachswitch was
toggled
on and off per each rotation of eachwheel of each
motor)
emanating
from
the
sensors.Our P5 Glove
was capable ofsensing
6
axes of movement(Up/Down,
Left/Right,
Forwards/Away, Pitch, Yaw,
andRoll)
as well asfinger
bends
andbutton
presses.(Figure
3)
The
glove system was comprised ofthe
gloveitself,
a sensorbar,
andthe
interpretation
softwarelocated
onthe
computer.The
6
axes were sensedby
the
sensor
bar
asit
caused each ofthe
infrared
LEDs located
onthe
gloveto
blink in
adistinct
pattern.Unfortunately,
poorly
manufacturedhardware
coupled with undueinterference from
externalinfrared
sourcesinduced
error.We
had
two
major sourcesoferror:
jitter
and skew.From
variousobservations,
weinferred
that there
weretwo
major
types
of error and one majorskewing
problem.The
small-scalejitter
we suspect
is due
to
camera noise asthe
CCDs
in
the
sensorbar detect
otherinfrared
sources and generate
internal
noise.The
large-scale jitter
wasdue
to
mis-observing
Figure 5. Picture of theCounterweight Manta'ssensor
wheel.
By
passing the line around thepulley, movement ofthelinecausedthepulleytorotate,
thereby
rotating theasymmetrically mounted wheel. This wheel then acti
vated, through its rotation,
two snap action switches.
Output from these switches was sent to our PhidgetIO deviceand
thereby
tothecom puter. Temporal sensinglimitations of the PhidgetIO device (not pictured) caused
this sensing methodology to
The Manta Project
-Technical Discussion
of theManta Project
23
the
gloveLEDs.
These
mis-observations resultedin
reported positionsthat
seemed(when
mapping
the
glove's positionto
avirtualhand
in
the
screen),
to
causethe
hand
to
jump
to the
other side ofthe
screen.We
tried two
fixes. Our first
attempts exploredsimple
averaging
methodologies,
trying
to
minimizethe
feelings
of an nonreactiveinterface
andminimizing
jitter.
However,
we were not ableto
find
asatisfactory
averaging
spanoftime
where wehad
both
a responsiveinterface
and minimaljitter.
We
then
movedto the
Kalman
Filter,
asimplemented
for
the
P5 Glove
by
Richard
Hachem.
This
filter
managedto satisfactorily
correctfor
the
jitter,
which exposedthe
other source oferror: skew.
While
up to this
pointthe
glovehad
serveduspoorly,
we choseto
continuedevel
oping
for it for
a number of reasons: wehad invested
too
muchtime
in
exploring
its
flaws,
we were undertime
pressurefrom
a plannedperformance,
and none of ourother
input
methodologieseasily
available(mouse
andkeyboard
ortheir equivalents,
in
the
main)
could offer simultaneous and synchronizedthree
orfour
channelinput.
Our
one viable option atthis
point wasto
take
the
fairly
reliableinput
from
the
P5
Glove's finger
bend
sensors andmap
it
to
each motor.This
motormapping
wouldprove
to
be
sufficiently
reliablefor
usto
useit
as part ofourfirst
real performance.However,
this
finger-bend-to-motor-mapping
solution was not withoutits flaws.
These
flaws
centered aroundthe
nature ofthe interface.
In
orderto
causethe
mantato
movein
adirection
relativeto the
atrium,
eachmotor wouldhave
to
reelline
in
orout.
Since
eachfinger's
extension or curl was mappedto
a specific motorreeling
in
or
out,
a specific gesturehad
to
be developed
for
each generaldirection. These
gestures
required precisefinger
control of allthe
fingers
onthe
operator's righthand
simultaneously.
Furthermore,
asthese
gesturesfocused
on simple machineinterac
tion,
in
lieu
of simple operatorinteraction,
the
gestures werehard
to
learn
andThe Manta Project
-Technical Discussion
oftheManta Project
24
These
unintuitive gestures complicated analready complex,
uncalibrated,
system.
Our four
motors reeledthe
line
atdifferent
ratesfor
many
reasons.At
root,
these
different
rates caused unintended vectorsto
be introduced
to the
manta'smovement.
These
unintendedvectors werefar
too
large
to
be
canceled outby
adjusting
the
gestures(as
only
avery
finite
set ofgesturesweresupported,
due
to
interface
difficulties),
thereby
requiring
frequent
position adjustments.This
produced a sawtooth
movement asthe
manta struggledto
hold
to the
desired
vector.Despite
these
difficulties,
the
first
version ofthe
mantaflew
successfully.The first
officialflight
ofthe
Manta
was atthe
B.
Thomas Golisano College
ofComputing
andInformation
Sciences'Digital Arts Competition
in
the spring
of2006.
Using