Indirect Neural Adaptive Control for Wheeled Mobile Robot
Full text
Figure
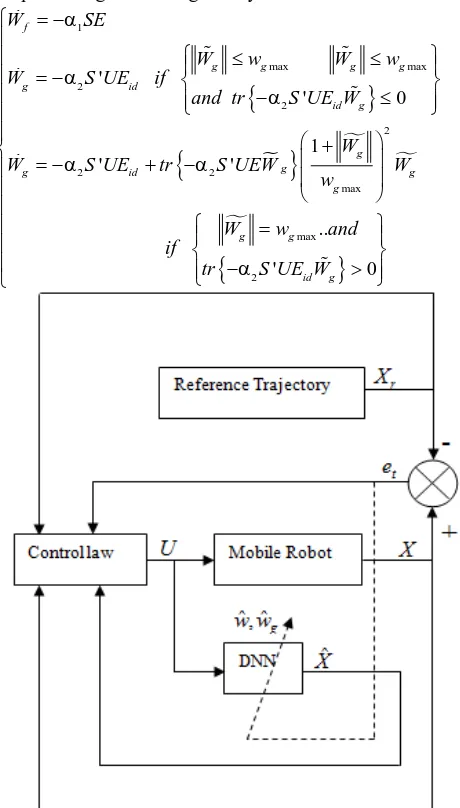
![Fig. 2. Neural network control. In [5], RNN are described as:](https://thumb-us.123doks.com/thumbv2/123dok_us/8161757.249827/3.595.305.546.430.581/fig-neural-network-control-rnn-described.webp)
Related documents
We typify joint distributions for class prevalences over standard simplices by means of uniform and beta distributions, and create a family of classification systems using actual
The predictive modeling approach followed in this study integrates known lung nodule geometric features and two types of CT attenuation features: classic a priori features such
[r]
which must be approved by the CCA and such equipment as may be necessary to ensure good ice (apart from the equipment provided by the CCA). d) Be responsible
Due to the more limited availability of stable market funding and the higher interest rates on savings accounts, mortgage lending rates are higher in the
The aim of this study was to compare the effects of intravenous Fentanyl as a pre- medication before induction of general anesthesia versus placebo on maternal hemodynamic
Table 2 Hedge Fund (Non-Hedge-Fund) Ownership and Stock Mispricing: Full Sample Result This table reports the results from the Fama-MacBeth cross-sectional regressions of hedge
