Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
1990
Simulation and analysis of a digital scanning system
Eugene A. Rogalski
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
Recommended Citation
Simulation and Analysis of a Digital Scanning System
by
Eugene A. Rogalski, Jr.
A Thesis Submitted
in Partial Fulfillment
of the
Requirements for the Degree of
MASTER OF SCIENCE
in Mechanical Engineering
Approved by:
Prof.
Joseph S. Torok
(Thesis advisor)
Prof.
Prof.
P Venkatar
Prof.
Wayne W. Walter
Mr.
Thaddeus Kciuk
Prof.
B.
Karlekar
(Department Head)
Department of Mechanical Engineering
College of Engineering
Rochester Institute of Technology
Rochester, New York
Simulation
and
Analysis
of
a
Digital
Scanning
System
I,
Eugene
A.
Rogalski,
Jr.
hereby
grantpermissionto the
Wallace
Memorial
Library,
ofthe
Rochester Institute
ofTechnology
to
reproducemy
thesis
in
wholeorpart.
Any
reproduction willnotbe for
commercial use or profit.Acknowledgment
This
work could nothave
been
possible withoutthe
supportandguidance ofseveral
individuals.
Its
success
is due
largely
to their
encouragementandsuggestions
andI
extendmy
deepest
appreciation:To Xerox
Corporation
for
the
useofcomputing
facilities.
To
Dr. Wayne
Walter,
Dr.
P.
Venkataraman,
andDr.
Hany
Ghoneim for
taking
time
outoftheir
busy
schedulesto
read and critiquemy
work.To Michael Boyack
whodesigned
the
control system which was usedin
this
analysis
and who providedthe
controlshardware
and software.His
enthusiasm
for
the
design
and analysisof controlsystems wasaninspiration.
To
Thaddeus
Kciuk
who providednumerous suggestions and guidance.To Dr. Joseph
Torok,
Rochester
Institute
ofTechnology,
Department
ofMechanical
Engineering
for
his
very
functional
guidance andencouragement.And
lastly,
though
notatalllast,
to
my
wifeMarlene
whosuppliedAbstract
The
analysis
and simulation ofthe
motion of adigitally-controlled digital
imaging
systemis
presented.The
dynamic
system consists ofascanning
carriage,
powertransmission
elements,
a primemover,
andacontrolsubsystem.
The
prime moveris
apermanent magnetDC
motorthat
is
positionedby
adirect
digital
control system.The
scan carriage motionis
mathematically
modeledand simulatedusing ACSL
andDADS
simulationsoftware.
T
he
simulationresultsare comparedto
empiricaldata.
It is
shownthat
the
dynamic
response ofthe
actualscan system canbe
predicted quitewell
using
suchsimulations.Furthermore,
these
simulations can aidin
the
Table
of
Contents
Page
List
ofTables
viList
ofFigures
viiList
ofSymbols
ix
I
Introduction
1
II
Control System
Preliminaries
11
III
Description
ofthe
Physical
System
24
IV
Mathematical
Modeling
28
V
Simulations
42
VI
Results
44
VII
Conclusions
55
VIII
References
58
List
of
Tables
Page
1.
Full Model
Step
Response
Comparison
47
2.
Physical Constants
69-70
List
of
Figures
Page
1.
Building
Blocksof
aDigital
Scanning
Device
2
2.
Imaging
Definitions
3
3.
Contrast
Sensitivity
ofthe
Human Eye
to
Square Wave Gratings
5
4.
Perceptibility
Threshold
ofEdge
Raggedness
6
5.
Motion Error
Detectability
-ThresholdDesign Goal
8
6.
Velocity
Error Design Goal
9
7
Basic Components
of aClosed
Loop
Control System
11
8.
Nonlinear
Element
12
9.
Linearity
Improvement
13
10.
Block Diagram
Transfer Function
15
11.
Block Diagram
Reduction
17
12.
Digital
Control
System
19
13.
Uniform
Sampler
19
14.
Sampler
withZero Order Hold
20
15.
Physical
System
24
16.
Control
System
/Mechanical
Block
Diagram
25
List
of
Figures
(continued)
Page
18.
Controls
Block Diagram
29
19.
Motor
Circuit
31
20.
Simple Mechanical
Model
Block Diagram
35
21.
Lumped Parameter
Mathematical Model (Translational
DOF)
38
22.
Linearized Lumped
Parameter Model
(all
DOF)
39
23.
Eigenvalues,
Eigenvectors
andMode
shapesfor
3 DOF
model41
24.
Simple
Model Motor
Step
Response
ACSL Simulation
45
25.
Simple
Model Motor
Step
Response
DADS Simulation
45
26.
Full Model Motor
Step
Response
ACSL Simulation
46
27.
Motor
Step
Response
Experimental Result
46
28.
Motor/ Carriage
Ramp
Response
-ACSLSimulation
48-49
29.
Motor/ Carriage
Ramp
Response
Experimental Result
50
30.
Motor
Ramp
Response Increased
Sampling
Period
52
-ACSLSimulation
31.
Motor
Ramp
Response Increased
Sampling
Period
52
-Experimental
Result
32.
Mechanical
Frequency
Response
53
List
of
Symbols
a;
Linear
acceleration, ith
elementB
Viscous
damping
coefficient
c
Command
positionCj
Viscous
damping
coefficientek
discrete
errorkth
sample
f
Position
feedback
Ffj
Linear
friction
G
Plant Transfer Function
H
Feedback Transfer Function
ia
Armature
currentli
Inertia
lm
System
inertia
Kd
Derivative
gain constantKe
Generated
back
EMF
constantK,
Spring
constant,
ith
elementKp
Proportional
gain constantKj
Motor
torque
constantLa
Motor
armatureinductance
Mj
Mass,
ith
elementNenc
Encoder
line
density
R
Result-Ouput
Ri
Radius
ofthe
ith
elementRc
Capstan
radiusRm
Motor
armature resistances
Laplace Variable
Tfj
Torsional
friction
TmotorTorque
producedby
motorTres
Resultant
Torque
Ts
Sampling
time
List
of
Symbols
(continued)
Va
Applied
motor voltagevi
Linear velocity
Vb
Generated
back
EMF
voltageVm
Motor
armature
voltagexj
Linear
positionz
Z Transform Variable
9i
Angular
positionai
Angular
acceleration8(t)
Unit Impulse Function
Qi
Angular
velocity
$
Magnetic
field
flux
I
INTRODUCTION
Digital
scanners
are
taking
on an ever-increasing
role asinput
devices
to
computer-based
systems.
As
typical
opticaldisk
storage
capacitiesexceed
1
Gigabyte
and
desktop
publishing
equipment
rivals printshop quality,
digital
scanners are
becoming
a popularcomputing accessory for
data
storage,
andimage
manipulation
purposes.
Acting
as
alink between
the
paper andelectronic
worlds, the
input
scannercreates
an electronicimage
ofthe
paperoriginal which
is
then
processed
according
to
the
user's requirements.Downstream
processing
may include intelligent
character recognitionfor
text
input
and subsequent
wordprocessing
applications,
enhancementfor image
input,
orfile
compression
for
archival storage purposes.The
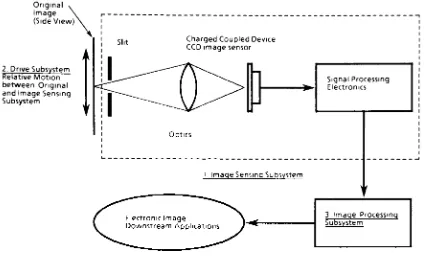
operation ofany digital scanning
device
requiresthree
basic
building
blocks
as
shownin
Figure
1
.The
first
and
mostimportant block
containsthe
image
sensor and optical system.Together
these
elements convertthe
light
anddark
portionsofthe
originalimage into
individual picture elementsor pixels.Charged
coupled semiconductordevices
(CCD's)
are
typically
usedas
image
sensorsin
many
scanners onthe
markettoday.
The
second
building
block
assures
that
the image
sensorphysically
scansthe
input
to
create atwo
dimensional
map
ofthe
original.This
motion canbe
achieved
by
moving
the
image
sensororthe
input document
relativeto the
otherusing
avariety
ofdrive
transmission
schemes.The
last step is
then to
processthe
two
dimensional
pixelbitmap
into
usefuldata.
Depending
uponthe
downstream
Original Image
(Side
View)"2 Drive Subsystem Relative Motion between Original
andImage
Sensing
SubsystemChargedCoupled Device CCDimage sensor
Signal
Processing
Electronics
Optics
1 Image
Sensing
Subsystem3 Image
Processing
[image:13.523.53.477.116.374.2]Subsystem
FIGURE 1
:Building
Blocks
ofa
Digital
Scanning
Device
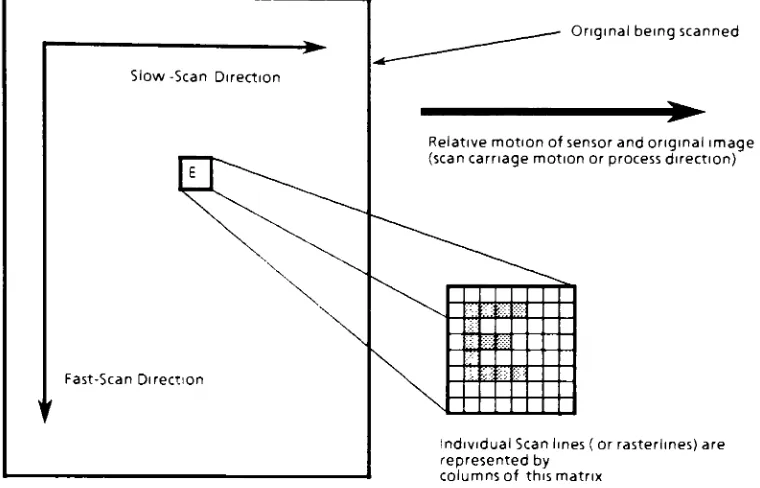
The
two
dimensional
map
ofpixels
formed
by
scanning
the
image
may
be
conveniently
thought
ofas
agroup
ofparallelbut
separate
scanlines
eachcontaining
a
line
of pixelsimaged
at aninstant
in
time.
The
lines
oriented
parallel
to
a scanline
are
saidto
lie
in
the
fast-scan
direction,
because
in this
direction
the
pixels
areimaged
more
rapidly.This is
the
direction
perpendicular
to
the
motion ofthe
imaging
carriage
or paper processdirection.
The
slow-scandirection is
defined
as
that
whichis
perpendicular
to
the
fast-scan direction
and
is
in the
direction
of motion ofthe
carriage.In
the
scanning
lines
ofa cathode
ray
tube.
The
above
definitions
are
illustrated
in
Figure
2
and are
further described
in
HI.
>?
Slow-Scan Direction
Fast-Scan Direction
Original
being
scannedRelativemotion of sensor and original image scan carriage motion or process
direction)
!*"rrr. m
^
individualScan lines
(
orrasterlines)are representedby
columnsof thismatrix
FIGURE
2:
Imaging
Definitions
Image distortion
can occurwhen eitherthe
fast
or slow-scan ratesare
not constant.Perturbations
ofscanrates
in
eitherdirection
cause pixelsto
be
imaged
incorrectly
and
as a result createlocal
variationsin
the
reflectance
ofthe image.
Random
fluctuations
in
onedirection
cause
onedimensional
disturbances in
the
recordedimage. This
phenomenonis
termed
"banding"and
typically
refersto
image
distortion
causedby
disturbances
which occurin
the
processdirection.
Banding
in
scannedimages
refers
to
the
fluctuations
[image:14.523.72.452.144.388.2]output
image.
Thus,
to
faithfully
reproduce
aninput
and
keep
customerperceptions
ofscanning devices
favorable,
vibrationsin
the
slow-scandirection
must
be kept below
perceptible
limits
[2-3]
.To
avoid such errors
in the
image,
the
main objective of scan mechanismdesign
must
be
to
provide a
smooth, i.e.
constant,
slow-scan velocity.However,
friction,
systemdynamics
and
otherdisturbances
causevelocity
fluctuations
and
vibrationswhichmust
be
attenuatedif
image distortions
are
to
be
minimized.
The
useoffeedback
to
control slow-scan motionis
usually
anecessity,
but
evenwiththe
added
robustnessofa controlsystem,
vibrationand
image
motion problems can stillbe
present.Additionally,
downstream
processing
andimage
outputdevices
can eithermagnify
or attenuatethese
errors and
like
consideration mustbe
givento these
additionaldevices.
Thus
some
questionsremain, namely,
how
to
determine
the
perceptiblelevel
ofslow-scan motion error
and
whatis
an acceptablelevel
of vibration?Much
ofthe
published workrelating to perceptibility
and motionrequirements
is
concerned withprinting
oroutputdevices,
specifically
xerographic
laser
printersMl.
However,
the
psycophysical experiments usedto
determine
human
visionsensitivity to image
defects
are
still applicableto
input
scanning devices.
Visual
perceptual phenomenaare
highly
dependent
upon avariety
offactors.
Variations
in
exposureduration,
illumination,
viewing
distance,
image
significantly
shift
perceptibility
thresholds.
A
full
discussion
ofthese
parameters,
the
eye's
structure,
andthe
psychology
of perceptionis beyond
the
scope
ofthis
work.
The
reader
is
directed
to the
appropriate references[4-71
for
more
detailed information
onthese
subjects.
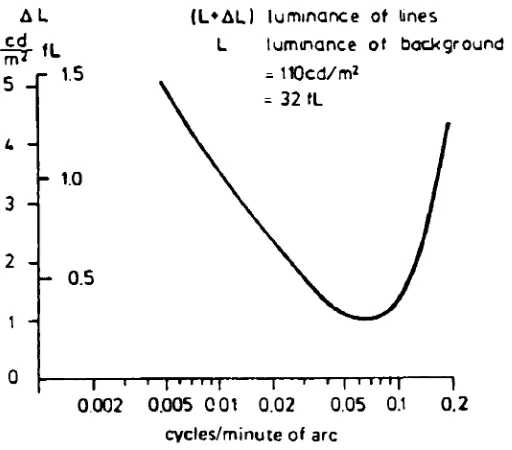
When
imaging
aspecific
pattern, if
groups
ofscanlines are
imaged
more
closely
together
orfarther
apart, the
average
reflectance ofthat
regionincreases
ordecreases,
respectively.
As
demonstrated
by
Hilzfs],
the
resulting
AL
cd
5
4
IL
r
1.5
(.
--
1.0
3
-2
-(L*ALl
luminance
of linesL
luminance
ofbackground
- HOcd/m*
-
32
tL
0.5
I 1
|
''"I
I r"'
I ""I
1
0002
0.005 0 01
0.02
0.05
0.1
0.2
cycles/minuteofarc
FIGURE
3: Contrast
Sensitivity
ofthe Human
Eye
to
Square Wave Gratings
8
periodicone-dimensional
brightness
fluctuations
and contrast
sensitivity
ofthe
human
vision system relatedto
local
frequency
is
depicted
in Figure
3.
Hilz's
work presentsthe
eye as most sensitive
(with
respect
to
background
[image:16.523.130.386.276.501.2]1
.2cyc/mm
(assuming
a300mm viewing
distance).
Bestenreiner
et
alIU
reinforce
the
supposition
that the
detectability
ofline
lattice
interference
structures
in
recorded
images
relies
uponthe
contrast
ofthe
lattice,
the
luminosity
ofthe
background
and
the
spatialfrequency
ofthe
lattice.
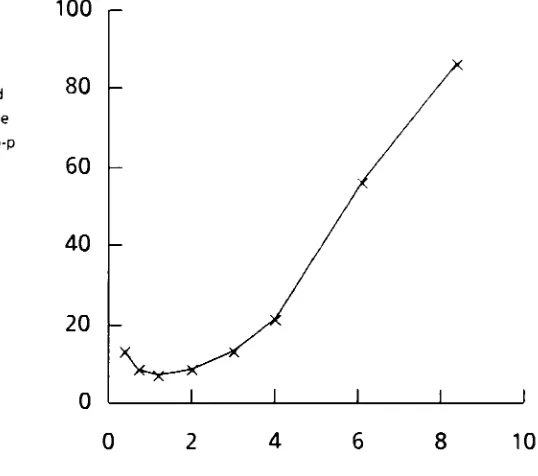
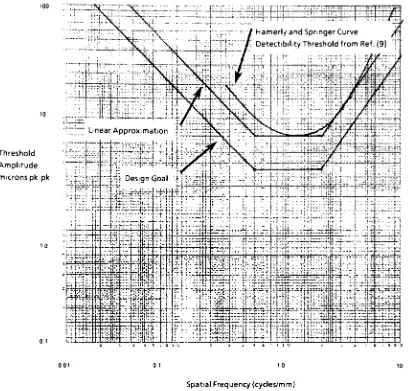
The
work ofHamerly
and
SpringerOl
(see
Figure
4),
in
regardsto
edge
100
r-Threshold
Amplitude
micronsp-p
80
-60
-40
20
-0
8
10
Spatial
Freguency
(cycles/mm)
FIGURE
4:
Perceptibility
Threshold
of
Edge Raggedness
8
detection
anddegree
ofraggedness,
alsosupports
the
presence
offrequency
select channels
in
the
eye
which mightbe
appropriate
for
describing
the
detectability
andthresholds
ofedge
raggedness.Figure
4
depicts
the
[image:17.523.120.389.215.453.2]frequency
based
upon a
viewing distance
of400mm. This
result
reinforcesHilz'
findings
and
describes
the
eye as most sensitive
to
errors
ofspatialfrequencies
in
the
0.5
-1
.2
cyc/mm
range.The
previous
findingsM-9]
and
Figures
3
and4
reinforce
the
inclination
to
develop
a
steady-state
motion specificationfor input scanning
devices
withthe
spatial
ortemporal
frequency
ofthe
motionas
the
independent
variableand
the threshold
amplitude
in
units ofdisplacement
asthe
dependent
variable.
Replotting
Figure
4
on alog-log
scale
(see
Figure
5),
severalregions can
be
identified
and a
linear
approximation canbe
usedto
delineate
the
threshold
values ofperceptible
error.Furthermore,
since
the
curveindicates
threshold
values(i.e.
errorswithamplitudes above
the
curveare
noticible
to
anobserver)
,
dividing
the threshold
by
asafety factor
of2
yieldsaspecification which
may
be
anappropriate
design
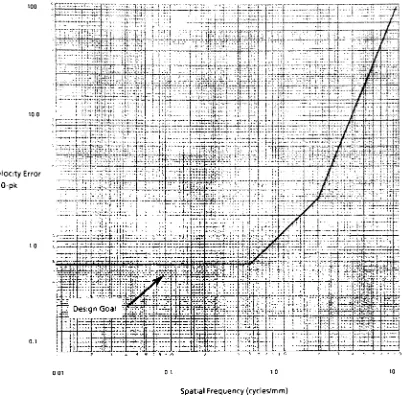
goal.Realizing
that the
measurement
of motionis
aninevitable
task,
it
is
appropriate
to
expressthe
perceptibility
threshold
in terms
ofvelocity
error(as
shownin Figure
6)
to
accountfor
different
sensortypes.
Refer
to
Appendix
A
for
the
conversionfrom
adisplacement-based perceptibility
threshold
to
a velocity-basedperceptibility
threshold.
The
motion requirementsandthresholds
for
many
commercialscanning
devices
reflectthe
scanning
resolutionand
oftentake
into
consideration
the
anticipated outputor
hardcopy
devices.
For example,
a
xerographiclaser
Threshold Amplitude microns pk-pk
^ 3 1
001 0.1
Spatial
Frequency
(cycles/mm)
FIGURE
5: Motion Error
Detectability
-Threshold
Design Goal
requirements
are
typically
very
stringent
to
allowfor
this
uncertainty.It
should
be
notedhere
that
the
derivation
ofthe
specification curves
is
[image:19.523.63.474.75.466.2]100
Velocity
Error%0-pk
y||I
Sfe^^^^fM^^fg^
Jig
g|Mfi
,4lferfft|FtrHt:-'-nT3:-n^l1i:>r
;
r
Mist
*A~h:l\i\:
>!:
;. ;Design Goal '-.!2^Ip.
-t
4t-&j*
w-i'it 2D" TTTT XXt#tSE!;CI
13x1CAiErfejtSitip
lit * Jtjt."fci~ f'
;
"
-ty---rt.{.-jrtiS;'*.f;''* r.
Silt rH'~T
-i-r-n--'-tl-'"- t^^ffi^-rr-?
7* ::':^:::i ;:4...:_.:-..ai-;i4-;-. . --pif-p Si}:!a::::r r+f7'Trj '
0.1 10
Spatial
Frequency
(cycles/mm)
FIGURE
6:
Velocity
Error Design Goal
In
light
ofthe
abovediscussion,
the
characterization ofthe
scanning
systemand measurementof motion
are
the
maingoals
in
an
analysis anddesign
ofa
scanning
system.The
motion goalsdefined
in
Figures 5
and6
are
the
specifications.
Mathematical
modeling
and simulationtools
canbe
usedto
predict
the behavoirof
a
systembefore
any
hardware
is
constructed.These
[image:20.523.67.469.64.459.2]analysis.
Experimental
verification
ofany
simulationis
prudentand
oftena
necessity.
The
goal ofthis
workthen
is
to
discuss
the
basic
operation ofaparticular
scanning
system,
performthe
analysis and
simulationsto
predictthe
characteristics
ofthat
systemand
finally,
to verify
these
predictions withII
CONTROL
SYSTEM
PRELIMINARIES
It is
appropriate
to
engage
in
a generaldiscussion
ofthe
mathematicsand
basic
principles
ofcontrol systems
that
willbe
requiredin the
simulationprocess.
Control
systems are
usedin
a widevariety
ofapplications
to
enablea
desired
performance
of adynamic
system underchanging
conditionsand are
generally lumped
into
two
categories-open and closed
loop
systems.Open
loop
(nonfeedback)
systems are
less
robustand areeasily
affectedby
externaldisturbances.
A
closed
loop
system,
onthe
otherhand,
usesfeedback
to
monitor
the
output and
is
able
to
compensatefor
externaldisturbances.
Feedback
can alsobe
usedto
improve
the
linearity
ofasystem and enablesit
to
be
more
robustin
rejecting
externaldisturbances.
Figure
7
shows
the
basic
componentsofa closedloop
control system.The
CONTnni sic;mai <;
PLANT
ACTUAL OUTPUT
COMPENSATION
UNIT
REQUIRED
'
'
OUTPUT
FEEDBACK
SENS ORS
Figure 7:Basic Components
of aClosed
Loop
Control System
plant
defines
the
processor system whichis
to
be
controlledand
may
containany
number ofcontrollable variables.To
obtain optimalperformance
from
adjusted accordingly.
Feedback
is
provided
by
sensors
which monitorthe
variables
that
affect
the
performance
ofthe
plant.The
compensation unitmakes
acomparison
between
the
required output and
feedback from
the
plant,
determines
if
the
error
between
them
is
withinacceptable
limits
and
then
adjusts
the
control signals
to
the
plant
to
achieve
the
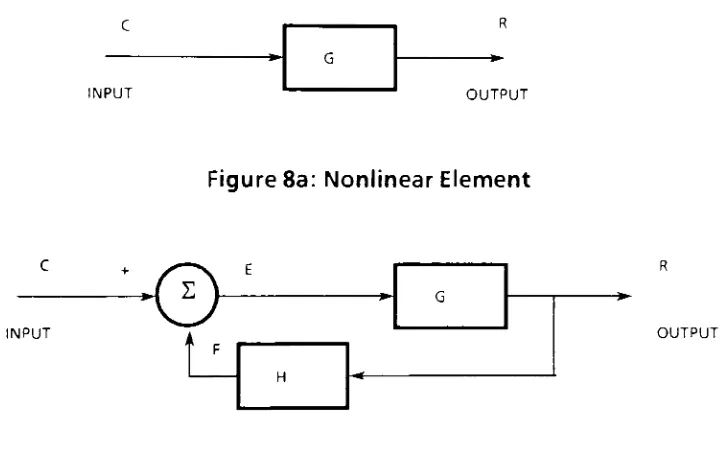
actual output.To
examine
how
closed
loop
controlsystems
canimprove
the
linearity
of asystemtiO],
consider
the
configurations
shown inFigure 8.
The input-output
c
G
R
NPUT OUTP
Figure
8a: Nonlinear Element
INPUT i
o
fc
G
J
' f
H
OUTPUT
Figure 8b: Nonlinear Element
withFeedback
relationship
for
nonlinear elementG
in
Figure 8a
is
R
= C2Figure
8b
shows
the
same nonlinear element with aunity
gainfeedback
loop
element
H
(H
=1).
The
equationfor
the
outputR,
in
terms
ofthe
input
C
for
the
closedloop
system ofFigure
8b
canbe developed
by
expressing
E
and
F
in
terms
ofC
[image:23.523.67.431.262.488.2]E
=C-F
E
=R/G
F
=HR
(2.1)
(2.2)
(2.3)
Substituting
2.2
and
2.3
for
E
and
F
in
equation
2.1
and
rearranging
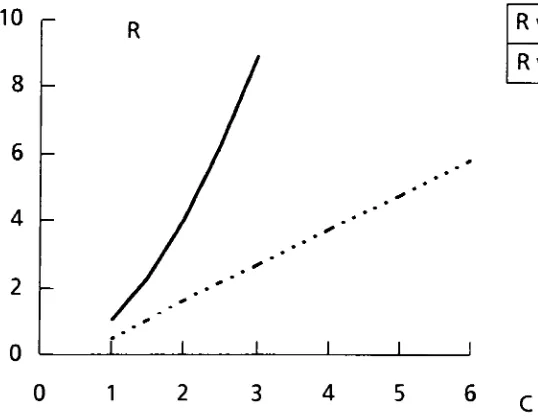
yields:R
=CG
(2.4)
(1
+GH)
Figure
9
plots
both
the
open
loop
and closedloop
outputs versesthe
input
C.
The
output
R
ofthe
closed
loop
caseis
more
linear
and
follows
the
input
C
more
closely
due
to
the
feedback
loop.
10
6
4
2
0
R
w/ofeedback
R
w/feedback
Figure
9:Linearity
Improvement
Another
feature
ofusing
closedloop
controlis
that
if
designed
properly, the
system
may be
less
sensitiveto
plant variations.If the term GH
in
the
denominator
of equation2.4
is
madeto
be
suchthat GH>
>1,
then the
[image:24.523.66.335.286.495.2]R~
CG_
(2.5)
GH
and
further:
R
~C_
(2.6)
H
If
GH>>1,then
variations
in
G
willhave
little
or no affect onthe
ability
ofthe
control system
to
effectively
controlthe
processG
as shownby
2.6.
The
Laplace
Transform
and
Transfer
Functions
Another
tool
that
is
used whenanalyzing
and
modeling linear
control systemsis
the
Laplace
transform.
This
is the
main mathematicaltool
ofthe
controlsystem
designer
because
it
simplifies
the
manipulation oftransfer
functions.
The Laplace
transform
relates afunction
oftime
f(t)
to
afunction
F(s)
wherethe
variable,
s,
is
in
general a complex quantity.The
transform
is
defined
by
the
definite
integral
F(s)
=/.
{
f
(t)
>
= 0/-f(t)e-stdt(2.7)
The
mainadvantage
ofthe
transform
is that
differentiation
andintegration
operations
are
changedinto
simple
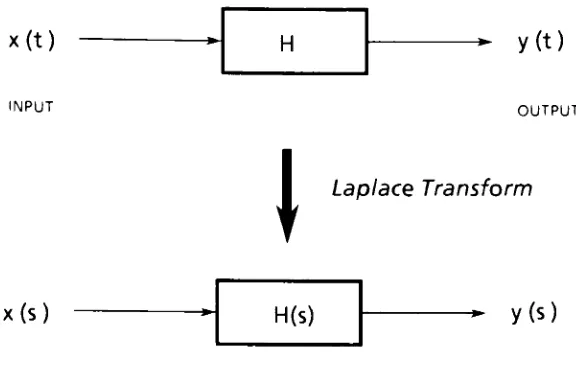
algebraic operations.Consider
the
block
diagram
in
the
top
portion ofFigure
10.
The
generic
function
H
can representany
mathemathicalrelationship
between
the
input
and
output.The
function
H
couldbe
a
constant valueindicating
a
linear
relationship,
a
first-order
pole ora
complexnonlinearfunction.
Applying
the Laplace
transform
to the
relationsdepicted
by
this
block diagram
wex(t)
H
y(t)
INPUT OUTPUT
\
Laplace Transform
x(s)
TRANSFORMED EXCITATION
H(s)
-y(s)
SYSTEM TRANSFER FUNCTION rRANSFORMED RESPONSE
Figure
10: Block Diagram
-Transfer Function
y(s)
=H(s)x(s)
(2.8)
Once
the
transfer
function
is
manipulated
to
the
properform
in
the
sdomain,
the
response
y(t)
ofthe
systemto
an excitationx(t)
may
be
recovered
by
the
inverse
Laplace Transformation
ofy(s)
represented
by:
y(t)
=Z.-1
{y(s)}
=M
{
H(s)
x(s)
}
(2.9)
Equation
2.9
canbe
usedto
derive
the
response
ofany linear
time-invariant
system subjected
to
anarbitrary
excitation.The Laplace
transform
ofthe
unit
impulse, 8(t),
is
8(s)
=J-8(t)e-stdt
=
e-st|t
=00/-8(t)dt=
1
(2.10)
[image:26.523.114.402.76.260.2]where
the
mean-value
theorem
has been
used.Inserting
x(s)
=8(s)
=1and
y(t)
=h(t)
into
2.10,
we obtain
h(t)
=M
{H(s)}
(2.12)
Thus
the
impulse
response
function, h(t),
of a constant coefficientlinear
system
is
equal
to the
inverse
Laplace
transformation
ofthe
transfer
function.
Furthermore,
the
unitimpulse
andtransfer
function
representaLaplace
transform
pair.Tables
oftransform
pairs,
applicablefundamentals,
andtheorems
ofLaplace
transform
theory
canbe
found
in References 10-1 3
and
will
not
be
covered
here.
Block Diagram
Reduction
-CDH
G,G2"3
1 + G,G,H2u3n2
Minor
Loop
reducedtosingleblockFigure 11b: Block Diagram Reduction
Block
diagrams
are
very
useful whenmodeling linear
systems,
however
the
analysis can getcumbersome
for
a
system withmany blocks.
The
reduction
ofa
large
systemis
accomplishedusing
equation2.4.
The
minorfeedback
loop
c +
a
-y~*Gi
\^J^G*
-*G'
-i
1
H2
*K
-1
H,
-* -1
Figure
11a: Minor
Loop
Feedback
shown
in
Figure
11b.
Further
reduction
ofthe
remaining
loop
in Figure 11b
is
represented
by:
R
=Gi G2G3
1
+G2G3H2
+G1G2G3H1
(2.13)
Control Laws
The
controllogic
elements
incorporated into
the
compensation unitare
designed
to
act uponthe
errorsignalto
produce
the
control orcompensation
signal.
The
algorithmthat
carries outthe
production ofthe
control signalis
the
controllaw
or compensation action.The
main controlobjectives are
to
minimize
steady
state
error,
minimizesettling
time
andachieve
othertransient
specifications such asminimizing
the
maximumovershoot.
Two
control
laws
that
form
the
basis
ofmany
control systemsare
two-position
and
proportional control.
As
the
nameimplies,
two-position
controlis
either
fully
on or
fully
off,
depending
uponthe
magnitude ofthe
error.
Proportional
control
implements
a
control signal proportionalto the
errorsignal
to
correct
Other
control
law
features
are possible
by
further
mathematical manipulationof
the
error signal.
By
using
the
derivative
and/orintegration
ofthe
errorsignal
in
conjunction
withproportional
control,
many
othertypes
of controlare possible.
The
transfer
function
X(s)
for
aproportional-integral-derivative
(PID)
controller
is
given
by
X(s)
=M(sl
=KP
+Ki
+KDs
(2.14)
E(s)
swhere
Kp, K|,
and
Kq
are
the
proportional,integral,
and
derivative
constants
respectively.
The
constants
Kp,
K|,
andKD
mustbe
chosencarefully
to
avoidinstability
and
to
yield an optimal response.References
10
and12
explainthe
advantages
ofusing
varioustypes
of controlfor
first
and
second ordersystems.
DIGITAL
CONTROL SYSTEMS
Digital
controlsystems are
fundamentally
different
from
continuoussystems
in
that
adigital
computeris
usedto
performthe
controllogic
operationsthat
are
requiredto
act
uponthe
error signal.Thus sampling
of acontinuous
variable
and
the
generation ofa
digital
compensation signalrepresent a
fundamental
departure
from
the
continuous systemanalysis
discussed
so
far.
The
respectiveeffects
upon systemdynamics
require
carefulattention.
The
sampling
period and
type
of control mustbe
selectedproperly
to
prevent
aliasing
ofthe
variablesand
possibleinstability.
The
control systemdiagram
changesslightly
withthe
introduction
ofthe
change
may
take
place.
Consider
the
digital
control system shownin Figure
Interface
Input +
Interface
<;
Output
^V
A/D Computer D/A PlantJ^
>
Sensor
Figure
12: Digital Control System
12.
The interface
atthe
input
ofthe
computeris
an analog-to-digital(A/D)
converter,
and
is
required
to
convertthe
continuous error signalto
aform
that
is
readable
by
the
computer.At
the
outputend
is
adigital-to-analog
(D/A)
converterthat
convertsthe
digital
compensation signalinto
aform
necessary
to
drive
the
plant.The
maindifference
from
a continuous systemis
that
some
portion ofthe
loop,
namely
the
controllogic,
is implemented
digitally.
Discrete
Time
Systems
Sampling
a continuoussignal canbe
representedby
the
closing
and
opening
ofa switch
as
shownin Figure 13. The
continuous signaly
(t)
is
sampled
uniformly
every T
secondsto
yieldthe
discrete
time
representation y*(t).The
sampled sequence
y*(t)
may
be
representedby
atrain
of unitimpulse
functions
occuring
atsampling
time
kT,
eachhaving
a
strength equalto the
o
o^Y
o
oContinuous
signal
y(t)
Discrete
signal y*(t)
Figure
13:
Uniform Sampler
withPeriod T
y*(t)
=y(0)8(t)
+y(T)8(t
T)
+y(2T)8(t-2T)
+=
E
y
(iT)
8(t
-iT)
fori
=0,1,
.,
N
(2.15)
The
sampler represented
in
Figure
1
3
does
notexist
in
real controlsystems
because
the
impulse
funtion
existsonly for
abrief instant
ofthe
sampling
interval
T. For
the
remainderofthe
sampling
interval
the
value ofthe
discrete
signal
y*(t)
is
equalto
zero.In
realsystems,
adata
hold
is
usedto
make
anO
^ CYT
Zero-Order
Hold
Continuous
Discrete
signaly*(t)
Digital
signaly(t)
Representation
Y(t)
y(t)
I
y*(t)f
Y(t)
|
.,
tin,
-"-t
0
T
2T
3T
0
T
2T
3T
Figure 14: Sampler
withZero
Order Hold
iT
<
t
<
(i
+1)T.
A
zero-order
hold
is
the
most
common althoughfirst
andfractional-order
data holds
are also
used.A
samplerand
zero-orderhold
andthe
associated
outputs are shown
in
Figure
14.
The
Z
Transform
The Z
transform
is
usedin the
analysis
ofdiscrete
time
systemsfor
the
analogous reasons
that
the
Laplace
transform
is
usedin linear
continuoussystems
-itmakes
the
analysis
easier.By
taking
the
Lapace
transform
ofthe
impulse
representation
of asampled
signalas
givenby
equation2.1
5
wearrive
at:Y*(s)
=y(0)
+ y(T)e-Ts + y(2T)e-2Ts +(2.16)
In
equation2.16,
the
shifting property
ofthe
Laplace
transform
has
been
used.
Using
the
definition
z = eTs
(2.17)
Y*(s)
may
be
rewritten as afunction
ofz:Y*(z)
=y(0)
+y(T)
1
+y(2T)
1
+. . .(2.18)
z z2
and
Y*(z)
is
the Z
transform
ofthe
function
y*(t).As
shownin
equation
2.18,
1/z
is
a
delay
operatorand
represents atime
delay
ofT. Thus the
powerseries
Y*(z)
=2 +3+6
2
+7 +...(2.19)
corresponds
to
sampled values
y(t)
=2, 3, 6,
-2,
7.
. .at
t
=0,
T, 2T, 3T,
4T.
.Tables
of
ztransform
pairs and
further discussion
ofthis
discrete
transform
can
be found
in
references
10,13
and
14.
Difference
Equations
The
control algorithms
ofadigital
control system areimplemented
by
discrete
time
approximations
oftheir
continuous
counterparts.This is
achieved
by
using
difference
equationapproximations
for
the
derivative
and
integral
parts
ofthe
controllaw.
First
difference
approximations are
often usedto
represent
the
slope
(derivative)
ofthe
error signale(t)
at
t
=kT:
forward
difference
backward
difference
(2.20)
central
difference
2T
Similarily
the
secondderivative
ofthe
error signale(t)
may
be
approximated
by
using
seconddifference
equations(see
Reference 14).
To
approximatethe
integral
term
/e
dt,
the
last
approximation ofthe integral
up to time
(k-1)T,
given asvk-i
is
used.The
approximationvk
up to
some
time
kT
may
be
written as:Vk
_Vk
_} +jek1
forward
rectangle rule
Vk
_Vk
^
+jek
backward
rectangle rule(2.21)
vk
=vu
+T(ek-i
+ ek)/2trapezoidal
ruleek
11
-ekT
ek
ik-1
T
Any
difference
equation control algorithm
is essentially acting
as a
digital
filter.
It
is
quite
different
from
an
analog
filter,
since
it is
implemented using
a
set
ofdigital
computer
instructions
ratherthan
a
physical circuit.As
anexample, the ouput,
Uk,
ofa
PD
(proportional-derivative)
digital filter
using
backward
difference
is
givenby
Uk
=KPek
+Kn(ek
ek-i)
(2.22)
T
For
further
information
on controlsystems
anddigital
control consultIll
DESCRIPTION
OF
THE PHYSICAL
SYSTEM
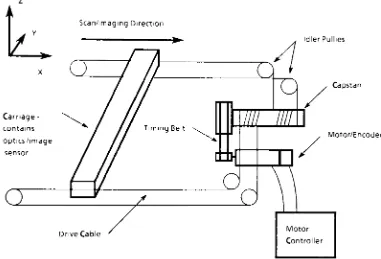
The
physical system under
investigation
is
shownschematically
in
Figure
1
5.
An
original
is
placed
onthe
platen glass positioned at a
fixed height
in
the
z-direction
above
the
carriage.
The
carriage provides
the
relative
scanning
motion
in
the
xy
plane
between
the
originaland
the
image
sensor.The
motion
is
achieved
by
asingle-capstan
dual-cable
system(Figure
15).
The
Drive Cable
IdlerPulhes
Capstan
Motor/Encoder
FIGURE
15: Physical System
carriage
rides
ontwo
precision-ground carbon steelshafts
whichare
fixed
to
the
machine
base.
Five
bearing
surfaces supportthe
carriage
onthe
shafts.
This
configuration prevents rotation ofthe
carriageabout
the y
and
xaxes.
[image:35.523.74.455.214.473.2]from
the
drive
motor
(4:
1
drive
ratio).
The
feedback device
is
a
1000
lines/rev
incremental encoder.
Two
encoder
outputs,
90
degrees
out
ofphase,
yield aquadrature
output
ofposition
and an effective resolution
of4000
lines/rev.
A
4-pole
permanent-magnet
DC
motor
is
the
prime mover.
Specifications
for
the
drive
components
and
manufacturer's
literature
onthe
motor/encoder
package are given
in Appendix
B.
Figure
16
shows a
block diagram
ofthe
control andmechanical
systeminteractions.
The
control system produces
the
torque,
Tmot0r,
whichsets
the
mechanical system
in
motion.
The
dynamics
ofthe
mechanical system affect
the
motor position
whichis
the
primary feedback
variable.The
controlMicroprocessor
Position Xcarriage
Vcarriage
Acarriage Position Error
Command
^^-^ Digital
i PWM
Filter/ i amplifier/
DtoA
j
Motor Converter iCircuit
'motor
Motor/Capstan
Carriage Dynamics
+s
-. _ _ _ J
^motor
Sack EMF
Feedback
Position
^motor
Encoder
[image:36.523.66.475.345.581.2]hardware
is
based
onthe
Intel
80286
microprocessor
which residesin
a
personal
computer.
A
prototype expansion
board handles
decoding
ofthe
encoder
output,
digital
to
analog
conversion,
control
loop
timing,
andassigns
communication addresses.
Initialization
ofvariables and
generation ofthe
position and error commands are encoded
in
software
(C
language). Since
the
position and error commands reside
in software,
aninherent
flexibility
in
customizing
and
optimizing
these
portions
ofthe
control systemis
allowed.An
external pulse-width modulated amplifier
circuit,
based
uponthe
L298
integrated
circuit,
amplifies
the
errorcommand
to the
motor.Operationally,
the
motoris
commanded
to
ramp up
as shownin
Figure
17,
Velocity
(m/s)
Velocity
requiredfor 50% magnificationNominal
Velocity
Velocity
requiredfor 200%magnificationImagesensor
activated
[image:37.523.50.473.329.587.2]Time
(seconds)
and must
then
settle
to
anacceptable
constantvelocity
before
the
image
sensor
is
activated.
The
nominal
velocity
ofthe
carriage
depends
uponthe
speed and resolutionof
the
imaging
sensor.The
nominal
slow-scanvelocity
forthe
scanning
device
is 208
mm/s.This
correspondsto
a motorvelocity
of51
rad/s.To
provide
for 50
-200%image
magnification, the
carriage mustbe
ableto
scanone-
half
and
twice
the
nominalvelocity
(104
and
416
mm/s respectively).The
motion requirements
during
the
steady-stateorimaging
portion ofthe
IV
MATHEMATICAL
MODELING
For
the
scanning
system
underconsideration, two
distinct
subsystemscanbe
identified.
The
mechanical
subsystem
includes
several elements - scancarriage, cables,
drive belt
and motor.
The
dynamics
ofthese
lumped
elements are
readily
described
by
the
usuallaws
of classical mechanicsandthe
subsequent system
ofdifferential
equations.The
control subsystemelements,
however,
are considered
individually
due
to the
nonlinearbehavior
ofsome elements.
Each
function
ofthe
control subsystemis
represented
by
ablock.
By
using
the
appropriateassumptions,
arelationship
between
the
input
and
ouput variables ofthat
block
canbe
determined.
The
reduction of
the
control systemto
a mathematical modeldemands
that
eachelement and
its
behaviour be
thoroughly
understood.This
sectiondiscusses
in
detail
how
the
control and mechanicalsubsytems are modelled.Controls
Model
The
initial step in mathematically
modeling
the
control nucleus ofthe
scanning
systemis
a
more specificdefinition
ofits individual
controlelementsMO-14].
Figure 18
elaborates onthe
single-block representation ofthe
control systeminitially
givenin Figure 16.
Each
block
representsa
mathematical
relationship
between input
and
outputvariables.All
variablesdepicted
are time-varying.
This
systemhas direct digital
control ofthe
motorposition,
01,
and providesthe
forcing
function
torque
necessary
for
input
to
the
system ofdifferential
equationsthat
describe
the
dynamics
ofthe
mechanical system.
In
turn,
the
dynamics
ofthe
mechanical systemaffect
the
the
secondary
loop
variable
ofmotor shaft
velocity,G)i
.The
control systemPC
based
Microprocessor1 Position 1 Command ^ e
C>
i i i i up U PD Control LawKd
kp
v3
vm
Motor Circuit 1. 1 ,
-h
DAC PWM-(!)
+
\
*
'
Ts
1
+"
vb
BackEMF!
f KaCO,
|
Position ! Feedback Encoder ' from motorUi6
s4Nenc
e,
[image:40.523.52.475.108.350.2]\
inFigure 18:Controls
Block Diagram
consists of
a
digital
section and ananalog
section.The
microprocessorsamples
the
motorencoderevery
Ts
seconds(nominally
600psec)
to
obtainthe
positionfeedback,
f,
and comparesit
to
a positioncommand,
c.The
resulting
discrete
error,
e,
givenby
e =
f-c
(4.1)
isthen
digitally
filtered
using
a proportional/derivative
(PD)
controllaw.
The
discrete
corrected or compensatederror, up,
whichis
outputto the
Digital to
Analog
Converter,
(DAC),
canbe
expressed
using
the
present
valueThe
result
is
expressed
as
up
=Kpek
+_Kd_[ek-ek-i]
(4.2)
Ts
where
Kp
is
the
proportional
gainconstant and
Kd
is
the
derivative
gainconstant.
This
portion
ofthe
control system
is
encodedin
software, thus
the
derivative
and proportional
gainconstants
canbe
adjustedto
optimize systemperformance.
The
discrete
compensated
error,
up,
computed
by
the
microprocessorevery
Ts
seconds
is
then
converted
to
ananalog
signal, u,
by
the
D
to
A
converter,
DAC.
The
modelled
DAC
has
aneight-bit
resolutionand
maximum output voltageof
3.3
volts.Since
it is
adiscrete
device,
the
DAC
canonly
recognize
alimited
range of
digital input
valuesbeyond
whichits
outputbecomes
saturated.
Thus
the
range ofdiscrete
compensated error enabledby
the
DAC is
28/2
or128
encoder counts.A
valueabove
128or
below-128
willsaturatethe
DAC
and
limit
the
output voltageto
the
amplifier.Since
the
D to A
converter
must calculate an
analog
voltage,
a
computationaldelay
of10
microseconds
was
also
included in
the
representation ofthis
control element.Amplification
ofthe
analog
errorsignal, u,
is
accomplished
by
aPulse Width
Modulated
amplifier(PWM)
witha
switching
frequency
of20khz.
This
type
of
amplifier,
as
the
namesuggests,
modulatesthe
width ofthe
pulse sent
to
the
motordepending
uponthe
level
of errorbetween
the
command and
the
feedback.
Appendix
C
explainsthe
operation ofthis
elementin
more
detail.
The
resulting
ouput,
Va,
is
the
amplified command signalapplied
to the
motor
The
modelling
ofthe
permanent
magnet
DC
motorrequires some
simplifying
assumptionsti
1.15-19];
1
.Magnetic
fieldflux,cb,
created
by
the
permanent magnets
is
constant.
2.
The
torque
developed
is
proportional
to the
magnetic
field
flux,
cb,
and armature
current,
ia,
givenexplicitly
asTmotor
=Ky
dp
ia
(4.3)
3.
Nonlinear
affects,
suchas
torque
rippledue
to
the
commutationdiscrete
poles are
ignored.
4.
Induced
electromotive
force (Back
EMF)
is
proportional
to
motorshaft
velocity,
an
:+
a
j>
vm
o--\AAA
Motor
Figure
19: Motor
Circuit
Vb
=KeG0i
(4.4)
The
voltagewhich acts onthe
motorarmature,
Vm,
is
equalto the
amplified
command
voltage,
Va,
reducedby
the
back EMF
voltage,
Vb,
generated
in
the
motor armature.
Thus
The
motor
armature
may be
modelled
as an
R-L
circuit as represented
in
Figure
19
with adriving
voltage
ofVm.
The instantaneous
potentialdifference
across
the
inductor
is
La
dia
/dt
and
that
acrossthe
resistoris
givenby
Rm
'a-The
sum
ofthese
potentials equals
the
applied
voltageto the
circuitindicated
by
Ladja
+Rmia
=Vm
(4.6)
dt
Assuming
initial
conditions equal
to zero, the
Laplace
transform
ofequation4.6
results
in:
(LaS
+Rm)ia(s)
=Vm
(s)
(4.7)
or rearranging:
LsM.
=1
(4.8)
Vm
(S)
(La
S +Rm )
Thus
the
transfer
function
ofthe
armature
circuitis
described
by
afirst
orderpole and
canbe
writtenas
ia(s)
=1
(4.9)
Vm
(s)
Rm
(
xes +1
)
where
xe
is
the
electricaltime
constant ofthe
motor circuit.Consequently,
the
motor
does
notimmediately
respondto
aninput
voltagedue
to
armature
lag.
Multiplying
equation4.9
by
the torque constant,
Kj
, wearrive at
anexpression
for
the
generatedtorque:
Tmntnr(s)
=_J<I
(4.10)
Vm(s)
Rm(xes+
D
The
effective
motorvoltageis
the
applied voltageVa
less
the
voltageVm(s)
=Va(s)
Vb(s)
(4.11)
where
the
back
EMF
voltage can
be
writtenas
Vb(s)
=KeCOi(s)
(4.12)
Thus
generated motor
torque, Tmotor,
in
terms
ofthe
applied voltage androtational speed
ofthe
motor
is
Tmotor(s)
=(Va(s)-KpCOi(s))
Kt
(4.13)
Rm(xeS+
1)
Equation
4. 1 3
shows
the
dependence
of motortorque,
Tmotor,
uponthe
input
voltage,
Va,
and rotational speed
ofthe
motor,
coi,
as
well as alag
in
responsedue
to
the
inductance
ofthe
armature
windings.The
driving
torque,
Tmotor,
is
used asthe
forcing
function
in
the
system ofdifferential
equationsthat
describe
the
mechanical subsystem.The
last
controlelement
to
be discussed
is
the
encoder.Although
this
element
discretizes
motorposition,
it
wastreated
as
aconstant
-gain amplifierelement.
At
steady
state, the
lowest
velocity
ofthe
motoris
~4rev/sec.Th
is
corresponds
to
asample
rate ofthe
motor position at1
6.4
khz.
The
nominalsampling
rate ofthe
control systemis
1
.67khz. This
10:1
ratio
is
high
enoughto
preventaliasing
ofthe
motorposition.The
physical constantsand
specifications ofthe
scanning
systemare
givenin
Simple
Mechanical
Model
Assuming
sufficiently
high
belt
and cable stiffness and
neglecting
carriage
and capstan
dynamics,
the
mechanical
subsystem
may be
represented
by
alumped
inertia
at
the
motor shaftHBJ
.
Viscous
and coloumb
friction
arethe
resistive
forces
present.
Denoting
lm,
B,Tf
and
Tmotor
respectively
as
the
system-reflected
inertia,
damping
coefficient,
frictional
torque
and generated
motor
torque,
the
differential
equation
ofthis
simple mechanical model
reduces
to
lmdco
= -BwTf
+Tmotor
(4.14)
dt
where
a)
is
the
rotational
velocity
ofthe
motor.
Combining
the
frictional
and
driving
torque terms in
asingle
term,
TreS/
and
taking
the
Laplace
transform
yields
(lms
+B)co(s)
=Tres(s)
(4.15)
from
whichand as a result
co(s)
=1/(lms
+B)
(4.16)
Tres(s)
H(s)
=coisi
(4.17)
Tres(s)
Thus
the
transfer
function,
H
(s),
ofthe
simple mechanical model
is
also
afirst
order
pole
and
canbe
modelled as such.
The
block diagram
ofFigure 20
shows
the
motorand simple
mechanicalmodel.
Motor
position
canbe
obtained
by
simply
integrating
the
velocity
term.
This
simple model provides
MS>-
'Tiotor(s' V^(S)CO,(s>
T(s)
Back EMF
K
CO,
Motor
Position
To Microprocessor
Mechanical
Model
The primary
concern
ofthis
investigation
is
the
oscillatory
response
ofthe
scanner
in
the
process
direction,
and as
such, the
following
degrees
offreedom
which are
kinematically
responsible
for
this
motionare
taken
into
consideration:
1
.)Translation
ofthe
carriage
in the
xdirection;
2.)
Rotation
ofthe
motor about
the
xaxis;
3.)
Rotation
ofthe
capstan about
the
xaxis;
4)Rotation
ofthe
carriage about
the
zaxis.idlerPulhes
Motor/Encoder
Drive Cable Motor
Controller
FIGURE
15: Physical
System
Rotation
ofthe
carriage aboutthe
x ory
axis and
linear
movement
in
the
z ory directions is
prohibitedby
a
low-profile
carriage,
proper placement
ofthe
[image:47.523.74.452.282.567.2]to the
guide shafts.
Figure
1 5
is
reproduced
so
the
readermay
visualizethese
degrees
offreedom.
In the transition
from
the
physical mechanical
systemto the
mathematicalmodel,
several
simplifying
assumption are
made:1.
Natural
frequencies
ofthe
idler
pulleys are
high (>
500
hz).
Previous
workincluding
these DOF
in
the
model verifiedthis
assumption.
2. Idler
pulley
masses
arelumped
with other significant masses:2
lumped
with capstan mass/ 4
lumped
with carriagemass
3.
Rigid
mountings
i.e.
pulley
supports/
brackets
no structuraldeformation.
4.
Only
drive-side
springs are
included
5. Capstan /motor
is
constrained
to
rotate about
the
x axis.6.
Cable
acts as
linear
spring,
regardless ofcarriage
position(
k
measured
at
3
locations
within5%).
7 Rayleigh
proportionaldamping
is
assumed
@
5%,
consistantthroughout the
model(translational
DOF)
8. Friction
coefficientsare constant9. The
systemis
alumped
parametermodel,
withsufficient stiffness
in
the
carriageto
avoidfinite
element analysis.The lumped
parameter,
mathematical modelfor
the
translational
DOF
Timing
BeltCable Motor
Carriage
Figure
21
:Lumped Parameter Mathematical Model
(Translational
DOF)
From the
modeldepicted
in Figure
21,
the
equations of motionforthe
translational
DOF
canreadily
be
obtained[20-22]:Motor:
MQi
=Tmotor
-Ri[Ci(RiCO,-R2CO2)
+Ki(Ri9i
R202 )
]
Tfi
(4.18)
Capstan:
l2d2
=R2(Ci
(Rico,
R2a)2)
+K1(Ri0i-R202)l
-Rc[C2(RcO)2-V3) +
K2(RC02-X3)]
Tf2
(4.19)
Carriage
Translation:
M3
a3
=C2 (Rc"2
-V3) +K2
(Rc02
-X3 )
[image:49.523.70.478.93.328.2]Capstan
Assembly M2
c 12Motor M
Carriage
Figure
22:
Linearized Lumped
Parameter Model
(all
DOF)
Figure
<