Theses
Thesis/Dissertation Collections
7-1-2004
Circle formation algorithm for autonomous agents
with local sensing
Andrew Mario Michael
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please [email protected].
Recommended Citation
By
ANDREW MARlO MICHAEL
Thesis submitted to the Faculty of Rochester Institute of technology
in
partialfulfillment of the requirements for the degree of
MASTER OF SCIENCE
IN
ELECTRICAL ENGINEERING
Approved by
Thesis Advisor
Thesis Committee
Thesis Committee
Department Head
Dr. Attimoottil Mathew
Dr. Ferat Sahin
Dr. Wayne Walter
Dr. Robert
J.Bowman
DEPARTMENT OF ELECTRICAL ENGINEERING, COLLEGE OF ENGINEERING
ROCHESTER INSTITUTE OF TECHNOLOGY, ROCHESTER, NEW YORK
Name of author:
=4
~
t':
r"e~~'~
Degree:
Ole
ojS
.
~ ~)Program:
~l
ey
±
Y;'v,I
..rf.
V\g"
v\'Pc:.> Ie«tl7
College:
Co "
flJ
0oj
f=
"'-8
! V\.e
Q ("l KIJ'I understand that I must submit a print copy of my thesis or dissertation to the RIT Archives, per current RIT guidelines for the completion of my degree. I hereby grant to the Rochester Institute of Technology and its agents the non-exclusive license to archive and make accessible my thesis or dissertation in whole or in part in all forms of media in perpetuity. I retain all other ownership rights to the copyright of the thesis or dissertation. I also retain the right to use in future works (such as articles or books) all or part of this thesis or dissertation.
Print Reproduction Permission Granted:
I,
~
V\ol
tew{i.
Mieh
0..."
L,
hereby grant permission to the Rochester InstituteTechnology to reproduce my print thesis or dissertation in whole or in part. Any reproduction will not be for commercial use or profit.
Signature of Author: Date:
O{lfi
3/01,
Print Reproduction Permission Denied:
I,
-f}
V\.vi
tew
ll.
M.
it~(JI.e)
,hereby deny permission to the RIT Library of the Rochester Institute of Technology to reproduce my print thesis or dissertation in whole or in part.During my study at Rochester Institute ofTechnology (RIT), New York, there
have been many individuals who have helped me in numerous ways. Dr. Attimoottil
Mathew, myresearch advisor, stands outamong them. He has tested me withhis sharp
questions that have made me think a great deal and helped me develop my thesis. Dr.
Mathew has seldom declined to talk to me when I walk into his office without prior
appointment! I thankhim for giving me so much oftime inspite ofhis busy schedule.
Working with Dr. Mathew has been very challenging. It made me realize my short
comingsandhelpedmetodevelopas a researcher.ThankyouDr. Mathew.
I wish to thank the head, faculty and staff of the department of Electrical
Engineering at RIT. The department funded most part ofmy research and helped me
cover my expenses at RIT. I thank the department for providing me work space and
equipment for my research. The faculty at RIT has been helpful in guiding me and
sharingtheir expertise. Specialthanks tomythesis committee members Dr. FeratSahin
andDr.Wayne Walter. Dr. Jayanti Venkataramanmetme acouple oftimes to talkabout
thepracticalapplicabilityofthealgorithm. Thankstoher. Ialso wishto thankMr. James
Stefano andMs. Patti Vicarifortheirhelp in manyways.
Myheart felt gratitude goes outto my family and fiancee for being with me in
spirit even though we are oceans apart. They have been my source ofinspiration and
encouragement attimes of need. Theirprayers havehelpedme survivemany difficulties
faced as an international student. Thank you so muchonce again to my dearest amma,
CIRCLE FORMATIONALGORITHM FORAUTONOMOUS AGENTS
WITH LOCAL SENSING
By
ANDREW MARIO MICHAEL
MasterofScience in ElectricalEngineering
Abstract
Researchon cooperativeroboticshas increased radicallyoverthepastdecade due
to its simplicity and applicability in a variety of fields. Shape formation plays an
important role in such cooperative behavior. Our work deals with the formation of a
circle by a group of mobile agents (robots) that initially are randomly spread and
randomly oriented in anunmapped terrain. The agents have simple characteristics and
limitedcapabilities. Theyareautonomous,homogeneous, anonymous,andmemory-less.
They do not communicate with each other, but are able to measure the inter-agent
distances and angels. The agents follow the same distributed algorithm synchronously
without any central control. The existing algorithms make it necessary to scan all the
agents over the whole terrain. The main advantage of our algorithm is that each agent
makes use oflocal information collectedfrom two neighboring partners. Our algorithm
also results in a regularly distributed circle for any form of initial distribution. By
changing a parameter inthe algorithm, the circle can eitherbe made to grow or shrink
uniformly. Applications ofthis work can be made to a variety of areas such as space
Table ofContents
Acknowledgments ii
Abstract iii
TableofContents iv
ListofFigures vii
ListofTables x
L Introduction 1
U Related Work 2
1.2 AdvantagesandDisadvantagesof past work 5
1.3 Our Contribution 7
1.4 Thesis Organization 10
2. Cooperative Robotics 13
2.1 AdvantagesofCooperative Robots 13
2.2 ExamplesofFonnationin Nature 15
2.2.1 SchoolsofFish 16
2.2.2 FlocksofBird 16
2.2.3 TermitesandArmyAnts 17
2.3 Importance ofSelf Organization in Cooperative Robots 17
2.4 Importance ofShape Formation in Cooperative Robotics 18
3.14.3 Irregular formation 63
3.14.4 Inappropriate DirectionofOrientation 67
3.14.5 Verysmall span of scan 70
4. Simulation andResults 74
4.1 Coordinate Axis Change 75
4.2 Flow ChartoftheAlgorithm 78
4.3 Convergenceofthealgorithm 80
4.4 EffectofsteponFormation 84
4.5 Effectof span of scanonformation 90
4.6 Effectof span of scan andstep onfinalradius 96
4.7 Circle formation forvariousinitial distributions 97
4.8 Shrinkingand growingcircle 100
4.9 Circlewithaparticular radius 102
4.10 Algorithmcomparison 105
5. ConclusionandFuturework 108
5.1 Conclusions 108
5.2 Future Work 109
Reference 112
Appendix A 116
Appendix B 117
ListofFigures
Figure 1-1 Initial agentdistribution.Circle showingtheposition oftheagentandthe lines
thedirection it isoriented 1
Figure 1-2 ApicturefromtheSydneyOlympics opening ceremony 7
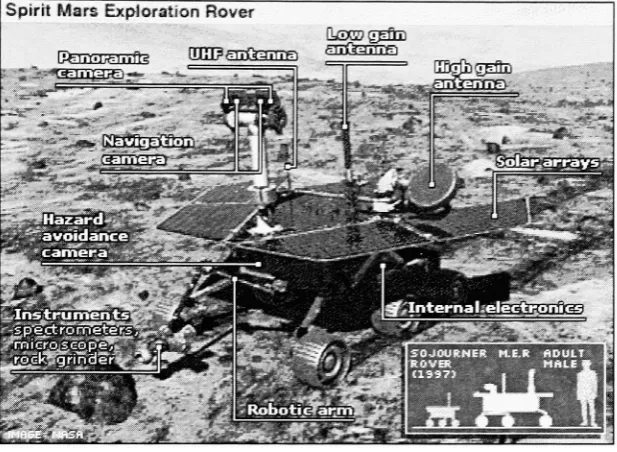
Figure 2-1 "SpiritofMarsrover",therobotthatexploredtheMartiansurface [38] 15
Figure 3-1 A colonyofagentsdistributed randomlywith theirdirectionsof orientation
and spans ofscan 22
Figure 3-2 Aregularhexagon (n =6)is divided into 4(n-2) triangles 28
Figure 3-3 PartnerselectionbyagentR; 29
Figure 3-4 Partners changingat each iteration 31
Figure 3-5 Nearestagents selected as partners 32
Figure3-6 Pathoffive agentsifthenearest agents are selected as partners 34
Figure 3-7 Pathoftheagentsifthesmallestangleagents are selected as partners 34
Figure 3-8 MeasurementofInter-Agentangle anddistance 36
Figure3-9 TwopossiblepositionsRni andRn2witha = 6andequidistantfrompartners
37
Figure 3-10 InternalandExternal agents 38
Figure3-11 A distributiontoexplainthe selection ofcorrect position 39
Figure 3-12 Position of partnersinthe localcoordinate system 41
Figure 3-13 Threepossiblewaysforpartnerstobewhen a<7t 42
Figure 3-14Threepossiblewaysforpartnerstobe for a > 7t 43
Figure 3-15 NewpositionRnofRi whena<7i, case(a) 43
Figure 3-17 NewpositionRNofR when slope ofRlRr>0 48
Figure 3-18 Diagram showingthedistance Dto travelandthe angleyto turn 51
Figure 3-19 Five agentsin formationof a regular pentagonshowingpreferreddirectionof
orientation 54
Figure 3-20 Theangle etobeadjustedbyRfor(a) a< k and(b)a > k 56
Figure 3-21 Aregularhexagon growingorshrinkingdependingon
6d
58Figure 3-22 Relation betweeninter- agentdistance(ird) andcircleradius(RAD) 59
Figure 3-23 Directionof orientationforR;aftermovingastep 61
Figure 3-24 Twoagents selectingthesame agents astheirpartner 62
Figure 3-25 Fouragentsin a rectanglemovingtonewlocationson another rectangle...64
Figure 3-26 Agents gettingtooclosetoeach other 65
Figure3-27 Simulation resultsfor irregularshapeformation 66
Figure 3-28 Simulationresults forchangeofinternalexternal agents 66
Figure 3-29 Aagentselecting inappropriatepartnerduetoits directionoforientation...68
Figure 3-30R7gettingstagnant atthewrongpositionintheformation 69
Figure 1-31 Twoagentstrappedinthe middle.Theirpath is also shown 70
Figure 3-32 Formationoftwoshrinkingcircleduetosmall span of scan 72
Figure 3-1 Changeofaxiswith respectto theposition anddirectionofRi 75
Figure 4-2 Distributionoftheinitial colony 80
Figure 4-3 Convergencegraphs,n=50,with unlimitedstepandrange. Errorfor
iterations from(a) 1-100(b) 101-200(c)Inter-agentangle (d)final formation 81
Figure 4-4(a)Errorvs.#ofiterations,n=49,withunlimited
stepandrange, (b) Final
formationafter300 iterations 83
Figure 4-5 Effectofstepsize onformation.Theright column showstheformationafter
50iterations andtheleftcolumn showstheerror graph 87
Figure 4-6 Theerror graph andthefinalformationforan optimalstep 88
Figure 4-7 Numberof agentsthatbecomeexternal againstnumberof steps 89
Figure 4-8 The initial colonyshown in figure 4-2simulatedwithstep=0.5for first 10
iterationsand0.01 thereafter 90
Figure 4-9 Effectofspan of scan onformation forthecolonyshownin figure 4-2 93
Figure 4-10Maximum,mean and minimumdistances fromthecentroidforthecase when
span ofscanis 0.2and0.3 94
Figure 4-11 Finalradius shown as a surface plotfor different stepandspan of scan 96
Figure 4-12 Final formation (right)forvariousinitial distributions (left) 100
Figure 4-13 Radius ofthegrowingcirclefor differentvalues of50 101
Figure 4-14 Radiusoftheshrinkingcirclefor differentvaluesof50 102
Figure 4-15 Mean distance fromthecentroid andfinal formation for differentrequired
radii 105
Figure 4-16 Distance fromthecentroid andthefinal formation in Suzuki'salgorithm. 105
Figure4-17 Distance fromthecentroid and thefinal formation inthealgorithm
developed inthisthesis 106
Figure 4-17 SimulationresultofSuzukiet al.'s algorithmwhentheinitial distribution is a
Table 3-1 Theoreticaland simulation valuesfortherequiredradius andthecorresponding
inter-agentdistance 103
A groupofrobots, autonomous, simple andtake steps as a result ofchanges inthe
environmenttoachieve a common goal withvery little human interventionor supervision
can be used in applications such as space missions, agriculture, fire fighting, search
operations, landmine de-mining and many others [1-3]. Over the years engineers and
roboticistshaveresearchedextensivelyon artificial intelligenceofan individualrobot. In
the recent past the attention has been diverted tocooperative robotics, inspiredby social
insectcolonies or swarms.
If n number of autonomous robots are scattered and oriented randomly in an
unmappedterrain (figure 1-1)orderingorarrangingthembecomes anissue ofimportance
iftheserobots areto achieve a common task. Sincethe terrain is unmapped andthere is
no global coordinate system each robot will be basically lost in the wilderness. The
distributionshowninthefigure needstoorganize andform ashapebeforetherobots start
toachieve atask.
Figure1-1 Initialagentdistribution. Circle showingthepositionoftheagentandthe
Research on forming shapes with cooperative roboticshas been ofinterest in the
recent past. This serves as a starting point for cooperative task achievement for
autonomous robotsrandomlyspreadinan unknownterrain.
1.1 Related Work
The study of swarms and theircomplex task of achieving a goal through simple
steps has been done for a long period of time. Inspired by the swarms, over the past
decaderesearchoncooperative roboticshas radically increased dueto its applicationina
varietyoffields.
Thepioneers of shapeformations incooperative robotics wereSuzukiet al. [1-5].
In their research they have developed algorithms for circle, line and simple polygon
formations. The algorithms are developed with the assumption that robots have global
sensing capacity. The robots need to know the positions of all the other robots in the
colony. Their circle formation algorithm is as follows. Each robot R monitors the
farthestrobot R andthenearestrobotR . If Dis thediameterofthecircletobeformed,
S a small positive constant anddthedistance between R and R , robotRthenmoves as
follows.
If d>D,thenRmovestowards R
If d<D-5,thenRmoves away from R
If D-S<d<D,thenRmovesaway from R
The algorithmintheir work is simple butthe formation is not precise. The circle
formed is an approximation of a circle and the robots are not distributed evenly on the
circumference. Further, for certain initial symmetric distributions their circle algorithm
doesnot make a circlebuta shape calledReuleaux'striangle[1].
Suzuki et al. in [3] give aformal discussion ofthe limitations oftheir algorithms
under certain assumptions. In their later work they have modified their algorithm to
represent a robot as adisc andhave alsoincludedcollision avoidance strategies [2].
Alongthelines ofSuzukiet al.'s work,extensive workhas been done byPrencipe
et al. [6-9]. In their research the robots are considered to be asynchronous and
formations resulting in finite time. There is no common notion of time and a robot
observes the environment at unpredictable time instants. The formation problem of
cooperating and coordinating a group of independent robots is analyzed from a
computational point of view. The main problems analyzed in their work are: arbitrary
pattern formation, gathering and flocking. In the arbitrary pattern formation the robots
have the capacity of global sensing, have a prior knowledge and agree upon a unit
distanceand a common direction. Therobots are also giventhecoordinates ofthepattern
tobeformedwith respectto theirlocalcoordinate system.Theproblemismathematically
analyzed. In the gathering problem, the robots are supposedto gather at a certain point.
Prior knowledge of a common direction by the use of a compass is exploited in the
developmentofthisalgorithm. The need of a compass arisesonly ifthe robotshave local
sensing,but iftherobotshaveglobal sensingthecompassis done awaywith.
The flaws and imperfections in the work of Suzuki et al. has been modified in
[10] Asstated earlierin [1] thecircle formation algorithmdoes not work wellforcertain
initial distributions and results in imperfect formations. In [10] a different approach is
Thealgorithmis asfollows.
Robot R determines the furthest robot
Rf
, the closest robot Rcl and the secondclosest robot Rc2. Computes the coordinates of the centroid pm, of
Rf
,Rcl and Rc2.
Moves to point pr which is r distance away from pm on the line that passes through
currentposition andpm,whereristhedesiredradiusofthecircletobe formed.
In thisworktherobots are also assumedtobe havingglobalsensingcapacity. The
algorithmdoes not explain how each robot will move from its present location to reach
thecentroidpoint.
In [11] the authors try to make a circle from a randomly distributed colony of
robots. The algorithm is based on Voronoi cells and Smallest Enclosing Circle (SEC).
The smallestenclosingcircle, as thename suggests, is thecirclewith the smallest radius
enclosing all the robots. Each robot determines the boundary ofthe smallest enclosing
circle and moves to that point. Here too the robots need to have sensing of the whole
terrain. The authors state "Althoughwebelievethat thealgorithm couldactually be used
inpractice, there are severalimportant issuesthatmustbeaddressed". Eachrobot has to
scan the positions ofthe rest of the colony and needs to make intensive computation to
determine theSEC. Also, how the SEC can be practically determined in real time is not
stated.
In [12] the circle formation problem is rather trivialized by the use of a beacon
around whichthecircleistobe formed. Iftherobotshavea priorknowledgeoftheradius
ofthe circle andby measuring thedistance betweenthemselves and thebeaconand then
bymoving accordinglycircle caneasily be formed. Ifthereis acentralbeaconthe terrain
is nomore unknown.The beacon itselfserves as theorigin of acoordinate system around
whichacircle ofdesiredradiusis formed.
From our literature survey the above were the algorithms we found on circle
formation in cooperative robotics. There are other formation algorithms but do not
directlyrelatetocircleformation. We also listthoseworksbelow.
Balch et al. [12-14], deal with the problem ofkeeping aformation and avoiding
obstacles while in motionrather than shapeformation of arandomly distributed colony.
Keepingthe shapeofafine, column, diamondand wedgeforagroupofrobotsinmotion
is addressed.Moreoverthe robots arenotconsideredtobe homogeneous sinceeach robot
hasanidentificationnumber. Theglobalpositioningsystem(GPS) is usedto transmit the
coordinates of the robot positions making the system not simple. The use of world
coordinates withthehelp ofGPSmakesthe terraintotallymapped.
Mataric et al. [16, 17] have also worked on maintaining formations for a small
group of robots. In their work the robots have local sensing but through simple
communication theyhave access to the global goal. The algorithm is developed by each
robotkeeping a designated friend at a particular distance and angle by using apanning
camera.EachrobothasauniqueIDand a protocolforcommunicationpurposes.
1.2 AdvantagesandDisadvantagesof past work
Circle formation algorithms stated abovehave theirowndifferentadvantages and
disadvantages.
The advantages of the algorithms presented in [1-5] and [10] are that they are
Themaindisadvantage of alltheabove algorithmsisthateachrobot needstoscan
the whole terrainfor the
functioning
ofthe algorithm. Byglobal scanning eachrobot hasto scan the positions of all the robots in the colony, store the information collected and
make decisions depending on the stored information. Global scanning is disadvantages
forthe
following
reasons.1. The battery power of the robot will die off faster, since scanning the whole
terrain needs more energy. This will reduce the time period the robot can
function.
2. To attain globalsensing it becomes necessaryto havemore powerfultransmitters
and sensors. Thismakes therobots sophisticated andnotsimple or weak.
3. Ifthenumber ofrobotsn is largetherobots needto haveamemory arrayto store
thepositions ofthe robots. Then therobots haveto sortthem to selecttheclosest
orthefarthestrobot.
4. Whenn is large scanningthewholeterrainis timeconsuming resulting inadelay
ateachiterativestep. Thisreducestheefficiencyofthecolonyaswhole.
Anotherdraw backof pastworkisthey do not explainhoweach agentwill move
at eachiteration. The directionandthedistancea robotwill make ateachiteration are not
explained. In simulation it is easy to find the location of the new position of the robot
usingtheglobal coordinate system. In apractical situation of anunknown terrainthere is
no such global coordinate system. A robot has toknow how it will reach a new position
at each iteration. This decision making on how each robot has to travel is not clearly
explained.
The other disadvantage is that the above algorithms do not always result in a
circle. The outcome is dependent ontheinitial distribution. The circleformed is also not
evenlydistributed.
1.3 OurContribution
Imagine the situation during Olympic opening ceremonies (figure 1-2) and other
sportdisplays the performers make various forms and shapes in alarge unmarked field.
Anothersituationis when agroup oflargenumber of peopleis askedto makeacircle. In
both these situations the members are able to form shapes with no central control in an
unmarked terrain. Essentially the members observe the positions of the neighboring
[image:19.534.111.427.383.625.2]members and positionthemselvesiterativelytillareasonably acceptable shapeis formed.
In this thesis we try to make a circle in an unknown terrain with autonomous
mobile agents with only local sensing capability. An agent observes thepositions ofthe
neighboring agents, oneto its leftand one to its right, computes thenext position it has
to be and moves there. The same iterative process of observe, calculate and move is
simultaneously executed by all the agents in thecolony till thecolony forms a circle. In
this thesis we present a circleformationalgorithmfor verysimpleagents.
The agents are autonomous. Human intervention is not needed after
initializingthecircleformation algorithm.
The agents in the colony are all identical. There is no leader or even a
hierarchicalstructure.
The agents do not communicate with each other. They do not have
distinctive IDnumbers.
The agents do not have knowledge of a global coordinate system since they
are spread in an unknown terrain. There are no landmarks or beacons
aroundwhichthecirclehastobe formed.
Theagents donot usetheworldcoordinate systemwiththehelpofGPS.
Theagentsdo nothavea sense of commondirection or use acompass.
The main advantage ofourcircle formationalgorithm is that the agents have
limited scanningpower.
Evenwith local scanningthe agents do not scan alltheagents withinits span
of scan. An agent selects and collects information only from the two
neighboring partners. This makes it unnecessary to store information of all
theagentsinthecolony.
The agents are memory less. They do not store information about their past
path pointsorabouttheirpast partners.
A novel idea of using the inter-agent angle information is exploited for the
formation algorithm. The inter-agent angle and distance information is used with
properties ofregulargeometricfigures intheformation.
The agents move in iteration synchronously. Their functions at a particular
iteration are:Move, Scan,Measureand Compute. Inouralgorithm wehaveused ahigher
computing power for the agents than other algorithms. An agent can perform algebraic
and trigonometric calculations to obtain the angle and distance it has to turn and move
respectivelyateachiteration.
We give a formal explanation mathematically and with the help of diagrams on
how each agent has to move at every iteration. We mathematically derive equations for
the distance and angle an agent has to take to reach the new position. The higher
computing power is used to obtain these distances by substituting in the equations we
derived.
Oursimulationdoesnot usetheglobal coordinates.Eachagent scans with respect
toits localcoordinate systemwithitsposition asits origin and directionof orientation as
thepositive x-axis.Simulationsare madetorepresenthow in arealsituation an agent will
observethecolony, selectthe partners, and calculate the distanceandangle it hasto take
In [6] the author quotes, 'Little is known about the solvability of other
geometrical problems like spreading and exploration...'. In our work we present
extensions ofthe circle algorithm, such as flocking or gatheringat one pointor foraging
in the formof a growingcircle. These arethe extensions ofthe samecircle algorithm but
areachievablebyalteringa single parameter.
Finally our algorithm works well for all type of initial distributions resulting in
evenly distributedcircles.
1.4 Thesis Organization
Chapter 1
In this chapter we briefly explained the area of shape formation in cooperative
robotics and its importance. Past work in shape formation and their advantages and
disadvantages were noted. Finally we gave details ofthe contribution we have made in
our circleformationalgorithm.
Chapter 2
In chapter 2 we give an understanding of cooperative robots. Examples of
cooperative robotsinnature are stated. Advantagesof cooperativerobotics are given.The
importance of self organization and shape formation in cooperative robotics is brought
forward.
Chapter3
Chapter 3 isdedicatedforthedevelopmentofthecirclealgorithm.We startwith a
description of the colony and the characteristics and capabilities of its robots. A
mathematical nomenclature of the colony is given. The mathematical idea behind the
circle algorithm is explained. Then we develop the understanding and some definitions
neededforthe algorithm. Howeach robot calculates thepositions ofother robots andthe
coordinates ofits new position with respectto its local coordinate system is worked out.
A mathematical derivation of the distance, the angle and the direction of orientation
adjustment a robot has to take at each iteration is given. We then explain how this
algorithmcanbealtered tomake a growingor shrinkingcircle.Finally somedraw backs
ofthe algorithmand possible solutions onhowtoovercomethem are addressed.
Chapter 4
In this chapter we obtain simulation results of the algorithm we developed. In
simulationeachrobot usesits localcoordinate systeminsteadofmakinguseoftheglobal
coordinates. The required coordinate axis change is explained. A flow chart of the
algorithmis thengiven. Theconvergenceofthealgorithmtoaregularly distributedcircle
is verified by plottingthe inter-robot distances. The effect of step size and span of scan
on the final circle formation is analyzed. Then we simulate the results for growing and
shrinking circle. Forming a circle with a particular radius is also simulated. Finally we
Chapter 5
Chapter five is for conclusion and future work. Issues involved in practical
implicationwillbestated.
Reference
Appendix
Swarm based robotics relies on agroup of simple robots that are able toperform
tasks without explicit representation ofthe environment and of the other robots [4]. In
this approach extensive initial planningofachieving atask is minimizedby allowing the
robots to react to changes in the environment. Social insects are autonomous and
communicate with each other through the environment. Indirect communication among
insects through modifications of the environment was coined stigmergy by Grasse, an
entomologist[4]. Stigmergy theorystates thatstepstakenby acolony is regulatedbythe
effect oftheprevious steps. It also states how activity can be regulatedusing only local
perception and indirect communication through the environment for coordinating
distributed behaviortoachieve a globaltask.
Social insects are very simple and ineffective as an individual entity but as a
colony they cooperate to attain global needs. In autonomous cooperative robotics the
sameidea is imitatedbyhavingseveral simplehomogeneousrobotsthat worktogether to
achieve a user defined goal. Unlike the artificial intelligence of a single robot that is
expensive, complicated, tailored to specific problems, cooperative robotics uses a
differentapproach ofusingteamsofsimple, interactingrobotstoperform a wide range of
tasks [5].
2.1 AdvantagesofCooperative Robots
The fact thatresearchers are yet to invent ahighly autonomous robot capable of
functioning in a changing environment has lead them to propose the organization of
robotics has several advantages over individual robots with artificial intelligence. If a
specific task is to be performed byan individual robot, it increasesthe robot complexity
making it difficult to design and fabricate. On the contrary cooperative robots have
elementaryfeatures makingthemeasiertodesignand manufacture.
Due to the simplicity and the increased number of robots made, the cost of
manufacturingcooperative robotsis highlycost effectivethan thatof anindividual robot.
A group of cooperative robots is comparatively more fault tolerant than an
individual robot. Sincethere are a number ofrobots, ifoneofthemmalfunctions therest
may carry on with the task. In our model we assume all the agents to be homogeneous
and with no hierarchy. This makes the colony further more fault tolerant. If there is a
hierarchy and there is a malfunction at the top of thehierarchy several or all the robots
may beaffected.
In cooperative robots the algorithmby which they are driven plays an important
role intheir functioning. It is comparativelyeasier to change thebehavior ofthecolony
by changingthe algorithm than tochange the performance of a single robot designedto
meet specific goals. Thismakes cooperative robots moreflexible.
Whenagroupofrobots are engagedin achievingthesametask, efficiencyoftask
completion increases. In applications such as space mission, search operation, lawn
movingorharvesting, moreareacouldbecoveredbythecolonythan theareacoveredby
anindividualrobot.
In the recent space missionsby NASA toexplore the Martian surface individual
robots are being employed. One such robotis shown in figure 2-1. In these single robot
missions therecould be numerable problems and thepossibilities of a mission failure is
fairly
high. By dropping a swarm of cooperative robots working together to explore theMartian surface, a high degree of fault tolerance may be achieved. Moreover the
efficiencyof exploration could alsobesignificantlyincreased.
Spirrt Mars Exploration Rover
Figure 2-1 "SpiritofMarsrover", the robotthatexploredtheMartiansurface
Forrobotsto functionas agroup insuchautonomoustasksinunknownterrainsit
becomes anecessitythat theyare capable of"Self
-Organizing"
or workin formations.
Social insects and animals that inspired cooperative robotics work as a group in
formationsorinanorganized manner[16, 17, and 18].
2.2 ExamplesofFormation inNature
Socialinsectsare distributedsystems inwhich colony level behavioremerges out
of interactions among individuals [19]. Intricate phenomena such as foraging, nest
[image:27.534.146.455.159.385.2]capabilities. There are other social animals in nature which thrive as a group but as an
individual entity may notbe able to survive. In many such colonies there is nohierarchy
or central control. Local information by neighbor observation is used to obtain global
goals.We examinefewsuchnatural systems.
2.2.1 SchoolsofFish
Partridgeexamines how schools offishmove incertain formationstoincreasethe
effectiveness ofthe school [20]. Forexample Tunaschools form a parabolic shape with
concave side forward and swim parallel to its axis. A prey reactingto the curved school
will be driven to the focus oftheparabola which makes the capture easier. A school of
fish moving in a certainformation has ahigherchance ofdetectinga predatorthan afish
swiniming individually. On the contrary predators also move in formations to increase
thesearch area.Thishelpstosharethefood foundbyaparticular member[21]. This idea
canbeappliedinsearchrobots for planetaryandmilitary applications.
Formations were maintained in these schools by individual fishes maintaining a
particular angle and distance with the neighboring fishes. This idea is utilized in the
algorithmofthis thesis.
2.2.2 FlocksofBird
Birds also flyin formations toincrease the scanningarea like schools offish. Air
force fighterpilotsuse this technique todirecttheirvisualandradar search dependingon
their position in a formation [22]. Three mechanisms: collision avoidance, velocity
matchingwith nearby flock-mates and flock centering in attemptto stayclose to nearby
flockmates are utilized [23].
2.2.3 TermitesandArmyAnts
Ants and termites are some ofthe most organized social insects. Construction of
nest structures, finding the shortest path between two
points, foraging efficiently as a
swarm, bringingback the food to the nest are some examples of self organization [24].
They use minimal communication between the members ofthe colony through trails of
pheromone. Inthese insectsformation is intheformofestablishedtrails.
2.3 ImportanceofSelfOrganizationinCooperativeRobots
Whenagroup of autonomous robots aredropped inan unknownterrain,thegroup
has to organize itself before it proceeds with task achieving. A self-organizingsystem is
definedby Farley et al. [25] as a system that changes its basic structure as a function of
its experience and environment. In self organizing system a change in the environment
may influence the same system to generate a different task, without any change in the
behavioral characteristics. Anysmall differences in individual behaviorcan influencethe
collectivebehaviorofthe system.
Self-Organizing autonomousrobotshave afew more advantagesthancooperative
robots with central control. In a large group of robots communication overhead is
prohibitively high to collect all relevant information to a central location. It is also
computationally infeasible fora centralcontrolto generate aschedulefortheentire setof
robots inreal time [1]. Hencetheneed of autonomous robotswith distributed computing
In military applications, the whole army of robots is destabilized if the central
control or the leader is destroyed. On the contrary if the robots are autonomous and
homogeneousthemission continues evenifafewrobots aredestroyed.
There are afew disadvantages inautonomous cooperativerobotics.Dueto lack of
coordinationthere couldbe stagnation [16].Agroup ofrobots could findthemselves in a
dead lock detrimental to the global task. The other disadvantage is that the
miniaturizationofrobotsseverely limitstheirsensingandcomputingpowers.
2.4 ImportanceofShape Formation in Cooperative Robotics
1. Iftheagents arerandomly spread andrandomlyoriented each agent will goabout
doing a task without the coordination of the rest of the colony. The behavior
would be haphazard, chaotic and will not be directed towards a particular goal
achievement.
2. Thisproblemis important, because itprovides away forthe agentsto agree on a
commonorigin and a common unit distance,for instanceby forminga circle [1].
A flock of agents can converge to a point and use that point as the origin as a
startingpointtoachieve varioustasks.
3. Formations can be effectively utilized in exploring an unknown terrain. If the
exploration is done in an unorganized manner it would be less efficient and
inconclusive.
4. Formations helpto increase the scanningrange ofa group of agents. In military
applications where sensor assets are limited, formations help to cover a wider
areaif individual members concentrate acrossa portion oftheenvironment while
theirpartners covertherest [13].
5. Can be usedin militaryoperations: toformabarricade in theshape ofacircle or
This chapter is dedicated to the development of the circle formation algorithm.
The chapter begins with an introduction of the colony and a description of the
characteristics and capabilities of the agents. The colony and the way it functions are
definedbya mathematical nomenclature.
The basic mathematical idea behind thealgorithm is explained. Then we proceed
to showhoweach agent will moveto a new positionusing this mathematical ideasothat
thecolonyas awhole will performthecircleformation algorithm.
Recallthatwearenotusinga globalcoordinate system. Thismakesit compulsory
to scan the terrain with respect to alocal coordinate system. The current position of an
agentis selectedas the origin andthe current direction oforientation as the direction of
positive x-axis ofthelocalcoordinate system.
An agent selects two partners, measures the inter-agent distances and the angles
and moves to a new position based on these information. For this an agent has to first
selecttwo partners. Partnerselection and whyan agent selectspartners in such amanner
is described in detail. The two parameters to be measured from the partners: the
inter-agentdistanceandtheinter-agentangleare defined.
Forthe agent to move to anew position it has to compute the distance (D) it has
to travel from its current position and the angle (y) it has to turn from its current
direction of orientation. We mathematically derive formulae for these two physical
quantitiesintermsoftheknownparameters.Aftertheagent movestoitsnew positionthe
direction of orientationoftheagenthas tobeadjusted forappropriate partner selectionat
how it is altered is explained. Finally the chapter deals with the short comings of the
circle algorithm and abriefexplanation onhow toover comethemaregiven.
3.1 TheColonyofAgents
The colony has n agents that initially are randomly distributed in an unmapped
and unknown terrain. There is neither a global coordinate system nor landmarks that
couldbe identified byan agent. Theagents inthecolony are allidentical in physical and
functional terms. They all start functioning synchronously in terms of scanning,
measuring, computingandmoving.
Initially the agents are randomly spread and randomlyoriented. The direction of
orientation of an agent is the direction from which it starts its scanning to its left and
right. The agentshave alimitedspan ofscan within whichthey candetect the positions
ofother agents. By movingtogethersynchronously ineach iterationcycle, the final goal
istoformaregular polygonthatis onthecircumference of a circle.
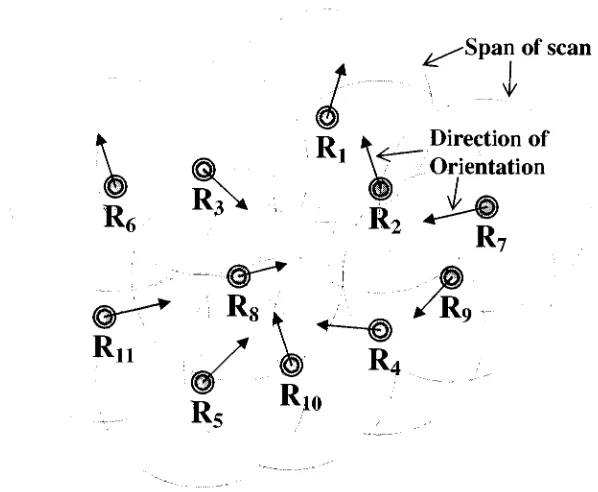
Figure 3-1 shows the positions of a colony of agents. The agents, Ri, R2..., are
represented by a circular disc. The line with arrow denotes the direction of orientation.
The agents are looking towards various different directions as shown by the lines with
arrow. The Dottedcircles arethelimits of spans of scanofthe agents. Each agent selects
twopartners within its span of scan and moves toanewlocation. This process continues
R6
.
V
Rn
^^Spanofscan
\
_ V [image:34.534.124.423.62.308.2]/\Ri
V-VR,
R8
Z
z^
R< RR4
/ 10 Directionof OrientationI
R7
R9V
Figure 3-1 A colonyof agentsdistributed randomlywiththeirdirectionsof orientation and spansofscan
3.2 Agent CharacteristicsandCapabilities
The agents in the colony are considered to be having simple characteristics with
weakorlimitedcapabilities.Theyare,
Characteristics: Autonomous, Homogeneous, Anonymous, Memory less, Synchronous,
UncommunicativeandMyopic.
Capabilities: Scan, Measure,ComputeandMove
Autonomous- This is
one ofthe main features and advantages ofthe agents in
thecolony. The colony istotallyindependentofanycentralcontrol afterinitialization by
theuser. Theagents areallinitialized atthesame timeinstant. Thenthe agentsfollow an
algorithmiterativelyuntil auser specifiedtermination.
Homogeneous- The
agentshave thesame limitedfeatures and areidentical in all
sense. There are no physical or functional differences. They use the same distributed
algorithmtodeterminetheirnext position atevery iteration.
Anonymous
-As a result ofhomogeneityit is impossible to have ahierarchy in
the colony or individual identification numbers for each agent. When an agent scans the
terrainall theother agents appearthesame.
Memory less - The
agents do not have any form of memory. They do not
remembertheirpast locations in the terrain. They also do not remembertheirpartners in
thepreviousiterationand ateach steptherest ofthecolonyappearsdifferent.
Uncommunicative- The
agents donotcommunicate with each other. Interagent
communication becomes a difficulty due to bandwidth limitations, especially when the
number of agents is large. Communication is through the environment in an implicit
manner rather thanexplicit communication between the agents. The agentsonly observe
thepositions oftheirneighbors withrespectto theirpositionanddirectionof orientation.
Myopic- The
agents are limitedwithonly local scanning facility. The agents are
abletodetect onlytheagentsthatfallwithinits limitedspan ofscan.
Synchronous
-The colony has a global clock which is launched at colony
initialization. Thereafter all theagents actsynchronously with respect toglobaltime and
also stop atthe same time. The global timingplays a very importantrole in the iterative
procedure of circle formation. The agents have to be stationary to measure inter-agent
angle anddistance. Iftheagentsarenotsynchronous and some ofthemarein motionitis
almost impossible to measure these quantities. The necessity of synchronicity could
Theagentshavethefollowinglimited capabilities.
Scan- While
thecolony of agentsisstationary, each agentcanscanalonga plane
fora range of2k radians. It is ableto detectother agents in the colony while scanning.
Anagent scans toits leftand right from its currentdirection of orientation.The instant it
detectsan agenttoits left it stopsscanningto theleftanddoesthesametoits right.
Measure
-Afterdetectingthe agents to its leftandright it is abletomeasure two
physical quantities: inter-agent distance and the inter-agentangle of the left and right
neighboring agents. More ofhow and whythe neighboring agents are selected in such a
manner will be explained in section 3.5. The definitions of agent angle and
inter-agentdistancearegivenin section 3.6.
Compute
-Using the distances and the angles measured, the agent is able to
compute y the anglebywhich it has to turnfrom its currentdirection oforientation, the
distance D it has to travel from its current position and the angle adjustment to be
made attheendof movement. The equationsforD, y and will be derived in sections
3.10 3.12 respectively. The agents are capable of performing basic arithmetic and
trigonometriccalculationstoobtainD, y, and .
Move- Theagentsintheproposed algorithm are ableto traversein any direction
in a two dimensional horizontal plane. They first turn an angley andthen move a user
definedmaximumdistanceofsteporless inaunittime.
The agents in the colony synchronously do the above foursteps at each iteration
cycle.Then thecycle starts again withscanningthen measuringand so onand movestoa
new position.
3.3 DefinitionsandNotation
Thenotations wehave used relateto the definitionsgiven in [3]. The colony hasn
agents.Let C denote theset of agentsin thecolony andR..R2...
.,R, ... Rn bethe agents
inthecolony. R;denotesthe/'*
agentofthecolony.
c={*,|i<,<}
(31)The synchronous formation ofthe colony is timed by the global clock. Afteruser
initialization, theagentsscan, measure,compute atdiscretetime instances.
t=kT
(3.2)
Here k is a positive integer, and T is the time period ofone iteration cyclein the
algorithm. One iteration cycle consist offour steps of scanning, measuring, computing
and moving. Let us denote these time intervals for these steps as Ts, Tm, Tc and Tm.
respectively.
T^+T^+T^+T^
(3.3)The time consumed for each of these steps by all the agents is the same to
maintain synchronicity. If synchronicity is lost the implementation of the algorithm
becomes difficult. For instance, during the scanning step the whole colony has to be
stationary. Ifsome of theagents are in motion it willbe difficult to detect and measure
thedistancesand angles oftheagentsinmotion.
Let pi
(t)
be theposition ofRi in the global environment at time instant t. Thenwe canwriteP(t), the setof positionsofallthe agentsas,
P(t) is the set of positions of all the agentsin Cat various discrete time instances.
Each agentR; observesP(t)differently unless the distribution is perfectly symmetric and
the
agents'
orientations are directed in a uniform manner. Ifthe agents in thecolonyare
myopic or with limited span of scanthen R, cannot observe P(t). It will only be able to
observe a subsetofP(t). Letus denote Vj(t) tobethesetofagentpositions observableby
Rattimeinstantt.Then,
^(OcP(f) (3.5)
Vi(t)=
{pv(t)\l<v<n}
(3.6)Since theagents in the colony are myopic vis not equal ton. v is the number of
agents detectableby R; within its span ofscan. Ifagents have global sensing capability
then v=n
.Ifthespan ofscanis small orifan agentis lost inthe terrain, itcannot sense
any other agent, then v=0
. Vrft) is different for all the agents unless in a very special
case ofaperfectlysymmetric distributionwith
agents'
orientations directeduniformly. A
formation in the shape of a regular polygon where the
agents'
orientation are directed
uniformly andradially inwards or outwardsis one suchdistributionwe can thinkof. The
ultimateaim ofthecircleformationalgorithmis tomakeVtft)of alltheagents same.
The step an agent needsto movedepends totallyontheprevious configuration of
the colony. Therefore, in a global sense P(t)directly relates toP(f-l). We could also
define P(t)in an alternative manner. P(t)is also a function of Vt(t). A step each agent
takes depends solely on how it observes part of the colony at that time instant.
Consequently,P(t)is dependentonVj(t), V2(t),..., Vt(t),..., Vn(t). Wecansaythat P(t)is a
functionofthe set,
V{t)=
{Vi{t)\l<i<n)
Forthecircleformationalgorithm letusdenotethis functionas C.
TO=
C(Wn)
(3.7)The function C foreach agent Ris calculatingthe angle y it hasto turn from its
current orientation, the distance D it has to move from its current position and the
angle adjustmentneeded at the end ofeach step. D and y depends on Vj(t), particularly
theinter-agent distances and theinter-agent angles ofthe partners selected by R;. Let us
see onwhat mathematicalidea Dand y are computed.
3.4 Mathematical Model
The mathematical idea behind our circle formation algorithm is simple and
straightforward. Formation of a circle with n agents can be considered as forming an n
sided regular polygon (n-gon). In other words it can be proved that the vertices of a
regularn-gon lieonthe perimeter of acircle. Ifthenumber ofagents, n, is largethen the
polygon would appeartobe distributed uniformlyonthecircumference ofacircle. Inour
algorithm we are trying to make a regular polygon which necessarily is on the
circumference of a circle.
The main idea behind the algorithm is to maintain a certain angle between the
neighboringagents. Ifthe agents are atthevertices ofaregular polygon this angle is the
same for all agents. For a regular polygon this angle can be easily found using basic
Figure 3-2 Aregularhexagon (n=6)is divided into 4(n-2)triangles
Figure 3-2 shows ahexagon divided into fourtriangles. We can generalize itto a
polygon with n sidesto state that the polygon canbe divided into
(n-2)
triangles. Thesum ofthe interior angles of atriangle is K radians. Ifa polygon with n sides can be
divided into
(n-2)
triangles then the sumofthe interior angles ofthat polygon can begivenby (n 2)7t radians.Aswe discussedearlier, since we areinterested informingan
n sided regularpolygon, the interior angles would all be the same forsuch a polygon. If
wedenotetheinteriorangle of ann sidedregular polygonby 6, itcanbe givenby,
(n-2)n
e=- (3.8)
An algorithm that progressively makes all the interior vertex angles of the
formation to be 6 and the neighbouring sides equal, in a colony of n randomly
distributed agents willleadto a circle formation. Inother wordswecan saythatifall the
agents try to make the internal angles between their neighbouring agents to be 6. then
gradually the formation will become a circle. To achieve this R should first find two
partners and move to a position where the angle will be 6 between the partners and
equidistantfromthem. Inthenext section we shall seehow Rjselectsitspartners.
3.5 Partner Selection
An agent has to identify two appropriate partners and move to anew position at
every iteration. The new position has to be equidistant from its partners making the
interiorangletobe 6.Toselectpartners anagenthastoscanthe terrainwithinitsspanof
scan. An agent can scan an angle of27t radians within its span of scan. Our algorithm
makes it unnecessary to scan this whole range. Ifeach agent scans to its left and right
from its current direction oforientation and collects information about its partners it is
sufficient for the functioning of our algorithm. Here we will explain how the partner
agents are selected.
Spanofscan
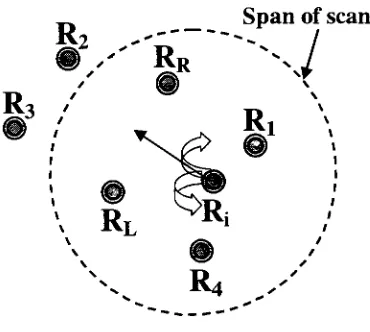
[image:41.534.199.384.429.595.2]Figure 3-3 shows a possible distribution of the positions of a few agents. Here
agent R is the agent of concern. The line with arrow is the direction ofR's orientation.
AgentsRl, Rr, Ri andR4,are all withinRj's span of scan and R2 andR3 are not.R scans
to its left andright as indicated in figure 3-3. The first agentit detects while scanningto
its leftsideis itspartnerto theleftandthefirstagentsit detectswhilescanningtoits right
is its partner to the right. Let us name these partners as Rl and RR respectively. Even
though agent R. is closerto R,it is not selected as a partner. The partner selected to the
right of Rj is Rr since RR makes the smallest angle from R;'s direction of orientation.
Similarly RL is selected as Rj's partner to the left. Agents R2 and R3make the smallest
angle withthedirectionoforientation ofRi,butsincethey are outofthe span ofscan,R
will notbeabletodetectthem.
From the above explanation we could define the partners ofRj asthe agents that
are within the span of scanofRj andthose that make the smallestangles to Rj's leftand
right with respect to Rj's current direction of orientation. Our algorithm functions with
theinformationgatheredfromthesepartneragents.
An agent is unable to select the same two agents as its partners for the entire
formation course. There are three reasons why an agent cannot carry on with the same
partners. The firstreason is that since the agents are allhomogeneous thereis no wayto
physically identify a previous partner. Recalling a partner is further made impossible
since the agents are memory less. The second reason is that the agents are
uncommunicative and as a result there is no way an agent could send a signal to its
partner regarding its current location. The main reason is that the colony is changing at
each iteration. A partner at a particular iteration may not be so in the next. The partner
may haveselectedtwoother agents asitspartners and movedawayto anotherlocation.
R2 R3N
R
|i
/
Rs
3
R4
o
RlN
Figure 3-4 Partners changingat each iteration
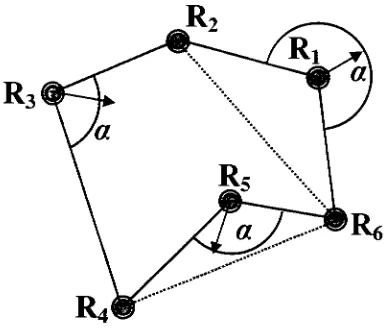
Figure 3-4 shows apossible distribution offive agents, Ri, R2,..., R5. Letus see
howthe partner selection will vary for agents Ri and R3. The partner selection depends
solely in thedirectionoforientation ofthe agents. The arrowed linesshow the directions
oforientationforRi andR3. According to thedefinition ofpartnersR3 selects R2andRi,
sincethey makethe smallestanglestoR3's left andrightrespectively. Ri does not select
R3butitselectsR4andR5. The newpositions ofR3 andRi are R3NandRinrespectively.
In the next iteration partners selected by Ri and R3 will depend on their direction of
orientation at that time. We will discuss in section 3.12 why and how the directions of
orientation are alteredaftertheend ofmotionat each iteration. It is intuitivethatafterthe
agents have reached the perimeter of the circle they should select the same partners to
maintainthe circle. Ina closedcircularpath,where allthe agents are onthe periphery of
formation will collapse. In section 3.12 we will see how, by altering the direction of
orientation, we can make sure up to a certain extent, that the agents select the same partnerstheyhadselectedinthepreviousiteration.
3.5.1 Whysmall angle partner selection
The agents in the colony as stated are simple and memory less. By selecting the
firstagents detectedwhen Rj scans to its leftand rightmakes scanningthe whole terrain
withinits span of scan unnecessary.Suppose we say 'selectthe twoclosest agents asRj's
partners', thenRhasto scanthe full 2n radianswithin its span ofscan. Moreover it has to store the distances and the angles ofeach agent it detected and sortto select the two
shortest distances and the respective angles. This procedure of scanning, storing and
sortingthedata ismadeunnecessary ifthefirstagentsdetectedon eitherside are selected aspartners.This increases theefficiencyandreducesthe simplicityof agents.
The main reason for not selecting the closest two agents is because the colony thenwould convergeto a single pointinsteadofformingacircle. Letustrytounderstand
this phenomenon ofconverging to a point with the help offive agents trying to make a
regularpentagon.
,A Ri
R2 *C
R3
Figure3-5Nearestagents selected aspartners
Figure 3-5 shows apossible distribution offive agents Ri, R2,...R5. Ri will select
R2and R3as itspartners since they are the closest agents. It wouldthen move toposition
C, equidistantfrom R2 and R3 making angel 0 SimilarlyR2'spartners will be R. andR3
andit would moveto B. R3 will moveto A selectingRi andR2 as partners. R4will move
to C afterselectingR2 andR3 as partners. R5will selectRi andR2and moveto A. In the
above explanationletus assumethepartners selected arethe closesttwoagents. Afterthe
first iteration the five agents wouldhave converged to three points. Herewe assume that
the step size is large enough for the agents to reach their final destination without
stoppingafter moving aunitstep. Forthe second iteration agents at A will select agents
at B and C and move to a point between B and C. Similarly C will move to a point
between A andB andB between A and C. As we could see the inter-agent distances are
progressively getting smaller andultimatelywillconvergeto a single point.
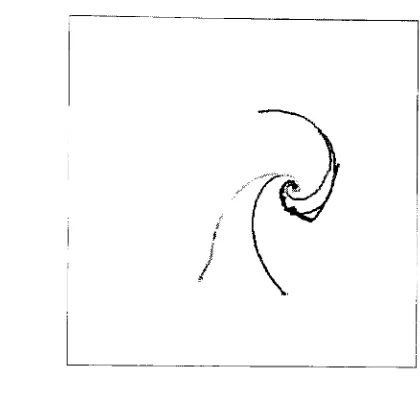
We simulated the sameinitial distributions offive agents and observed theirpath
forthe twodifferentcases. Inthe firstcase thenearesttwoagents areselected as partners
andinthe second case partners are selected accordingto our definition given in 3.5. The
agents in the simulation move a unitstep afterselecting the partners without moving to
thefinalposition. Figure 3-6 shows thepaths offive agentswhere thenearest agents are
selected as partners and figure 3-7 shows the paths of the same initial distribution but
here smallest angle neighbours are selected as partners. The circle mark denotes the
initial position ofthe agents and the asterisk denotes the final position. As we can see
fromthe diagrams, when nearest agents are selected as partners the agents gradually get
closer and closerandfinallyconvergetoa singlepoint.In thesecond case wheresmallest
Figure 3-6Pathsoffiveagentsifthe nearest agents are selected as partners
Figure 3-7Pathsoftheagents ifthe smallest angle agents are selected as partners
After the appropriate partners are selected R has to measure the inter-agent
distances and the inter-agent angle between the partners. In the next section we will
define and explainthesetwoparameters.
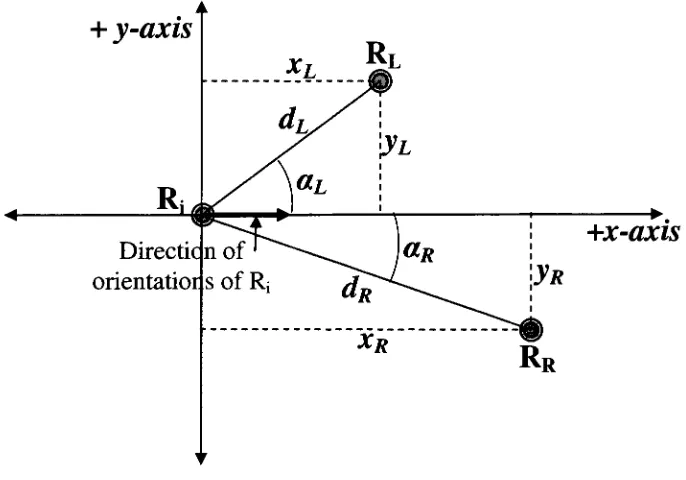
[image:46.534.128.390.345.554.2]3.6 Inter-Agentangle andInter-AgentDistance
Figure 3-8 showsthe positions ofRj and its partners. The thicklines with arrows
show two possible orientations of R,. Let O be the direction of orientation ofR. After
scanningtoits left andrightstartingfrom its currentdirection oforientationR detects its
left partner RL and right partner RR. The distances RlR and RRR are the inter-agent
distances R will measure. These distances aredenotedby dL and dR respectively. Hence
dLanddRarethe distances between R'scurrentposition andto theleft and right partners
respectively.
The angles RlRjO and RrRjOare the angles between Rj's directionof orientation
and to the left and right partners respectively. The angle to the left partneris denoted as
at andto therightpartnerasaR.
aL=^RlR;0 and
aR =jCRrR,0
Letus denote,
a=
aL+aR (3.9)
ais theinter-agentangle madebythe twopartnering agentswith theposition of
Ri which includes the direction of orientation of Rj It could be less than n radians or
greater depending on the direction of orientation of Rj. The orientation can be in any
direction,butit is ofimportance toknow ifthedirectionoforientation is intheconvexor
(b)
[image:48.534.65.474.65.316.2](a)
Figure 3-8MeasurementofInter-Agentangle anddistance
(a)whena^+<r<n and (b)whenol+<*r>n
Figure 3-8(a) and figure 3-8(b) show three agents at the same locations but
differing inter-agent angle a for R. a is different due to its differing directions of
orientation of R,. In figure 3-8(a) the direction of orientation is in the convex region,
thereforea<7t. In figure 3-8(b) direction of orientation is in the concave region and
a>n.
Thevalue of a, i.e. whether a > n or a < n is ofimportance forR to move to
therightposition. In thesubsequent section we shall explain the importanceofthe value
of a. We shall usethevalueof a todefine internaland externalagents.
3.7 InternalandExternal Agents
The goal ofRjat eachiteration istomaketheinter-agent angle a equal to 6 and
dL=dR=d. d is not auser defined parameter but depends on the inter-agent distances
and the inter-agent angle between the partner agents. After Rj detects its partners, there
are two positions Rj could move to, so that the inter-agent angle is 6 and is equidistant
from itspartners.
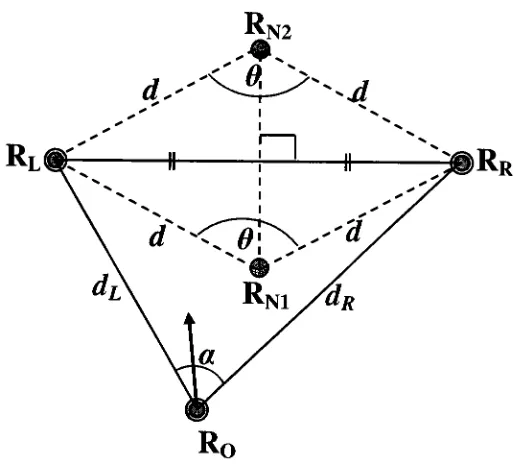
Figure3-9Twopossible positionsRNi andRN2with a=0and equidistantfrom
partners
In figure 3-9 the old position ofRj is denoted by R<> RidetectsRl and Rr as its
partners and measuresdu d^ aLand aR. The two possible positions R could move are
shown in the figure. Let us name these positions as Rni andRn2- These positions are in
theperpendicularbisectorofRiRrand atboththese positions,
RLRN1
=RRRN1 =
RLRN2
=RRRN2 =d 3nd
^RLRN1RR
=^RLRN2RR
=^Onepossible position is on the same side ofRo, with respect to the linejoining
[image:49.534.151.408.140.372.2]thisline. Tochoose which position R, should select we makeuse oftheinter-agent angle.
Tounderstandthis decision makingwe need tointroduce two newterms:Internal Agent
andExternal Agent.
i i i i i
\
< [image:50.534.185.351.140.292.2]\ \
Figure 3-10 InternalandExternalagents
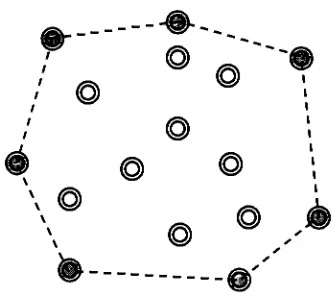
In a randomly distributed colony of agents we could define Internal agent and
External agent as follows. Imagine of connecting the agents with lines and making
polygons so that all the agents in the colony are inside the polygon. We could form
various polygons with different number of sides. Such a polygon with the smallest
number of sides is of our interest. The agents at the vertices of the polygon with the
smallest number of sides and that encompasses the rest ofthe colonycan be defined as
the External agents. The agents that are contained by this polygon are the Internal
agents. In figure 3-10 the agents that are shaded inside are the external agents and the
ones thatare plain aretheinternalagents.
Theobjective ofthecolonyofagents would be forall agentsto become external.
In other wordswe could saythat theinternal agents havetomovetowards theperiphery
of the encompassing polygon while the external agents position themselves so that the
polygonbecomesregular. Letus look intoadistributionandtrytounderstandhowagents
would cometoknow ifthey areinternal agents or external agents.
[image:51.534.178.371.130.296.2]Figure3-11 A distributiontoexplaintheselection of correct position
Figure 3-11 shows an agent distribution of six agents. Ifthese six agents are to
make a regular hexagon letus examine how agents Ri and R5 should move so that the
formation leads toward a hexagon. Let us assume that the directions oforientationsfor
these agents are as shownby the arrows. Agent Ri will detectR2and R6 as its partners.
For the formation to get closer to a hexagon Ri has to be on the same side of its old
positionwithrespecttoline R2R^- hithecase ofR5 itwill selectR4andR^asitspartners.
Again forthe formation tobecomearegularhexagon R5has to cross overline R4R6 and
selec