Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
8-11-1997
Evaluation of two applications of spectral mixing
models to image fusion
Gary Robinson
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
.
Recommended Citation
EVALUATION OF TWO APPLICATIONS OF SPECTRAL
MIXING MODELS TO IMAGE FUSION
by
Gary D. Robinson
Captain, USAF
A thesis submitted in partial fulfillment of the
requirements for the degree of Master of Science
in the Center for Imaging Science,
Rochester Institute of Technology
August 1997
Signature of
Author
G_a--=ry_D_"R_o_b_i_ns_o_n
_
Accepted
by
H_e_n--<..ry_E_"_Rh_o_d--<..y
f...;,.~_,(_)_9_f
_ _
CHESTERF.CARLSON
CENTER FOR IMAGING SCIENCE
COLLEGE OF SCIENCE
ROCHESTER INSTITUTE OF TECHNOLOGY
ROCHESTER, NEW YORK
CERTIFICATE OF APPROVAL
M.S. DEGREE THESIS
The M.S. Degree Thesis of Gary D. Robinson
has been examined and approved by the
thesis committee as satisfactory for the
thesis requirement for the Master of Science Degree
Dr. John R Schott, Thesis Advisor
Dr. Robert Fiete
Rolando Raqueno
TIlESIS RELEASE PERMISSION
ROCHESTER INSTITUTE OF TECHNOLOGY
COLLEGE OF SCIENCE
CHESTER F. CARLSON CENTER FOR IMAGING SCIENCE
Title of Thesis:
Evaluation of Two Applications of Spectral Mixing Models to Image Fusion
I Gary D. Robinson, hereby grant permission to the Wallace Memorial Library ofR.I.T. to reproduce my thesis
in whole or in part. Any reproduction will not be for commercial use or profit.
Signature:
--;-
_
---'~'4C--',~:L.7_6~7--Acknowledgments
Iwantto thankallthemembersofmythesiscommitteeforthe
help
and guidancethey
providedduring
thecourse ofthisresearch. Aspecific acknowledgment goestomythesis advisor,Dr. John Schott for
helping
toanswerquestionsandfor providing ideas for differentavenues ofinvestigation.
Iwould alsoliketothank theDIRSstaff and students. Thestaffkeptthecomputersrunningand
provided me with valued assistance withDIRSIG.
My
fellowstudentstook time tolistentomyresearch difficultiesand offersuggestions,manyof which provided successful alternativesformyresearch.Table
ofContents
1.INTRODUCTION 1
1.1 SpatialvsSpectral Resolution 1
1.2 Correlation 2
1.3 Mixed Pixels 3
1.4 Scale Factor 4
1.5 Obtaining High Resolution MaterialMaps 5
1.6 Outline 7
2. BACKGROUND AND LITERATURE REVIEW 9
2.1 Existing Image Fusion Methods 9
2.1.1 Image
Mergingfor Enhancement of Visual
Display
102.1.2 Image
Merging
by
SeparateManipulation of Spatial Information 112.1.3Image
Merging
Which Maintains RadiometricFidelity
122.2 Spectral Unmixing Methods 19
2.2.1 Tricorder 20
2.2.2 Spectral Mixture Analysis (Traditional
Unmixing)
232.2.3 Constraint Conditions 27
2.3 Image Fusion Via Stepwise UnmixingandSharpening 29
2.3.1 Stepwise
Unmixing
302.3.2Constraints 33
2.3.3
Sharpening
353. APPROACH 39
3.1 UseofSynthetic Imagery
(SIG)
393.2 Test Method Overview 40
3.3 SelectionofTestImages 42
3.4 CreationofPanchromatic Data Sets 50
3.5 Generating Fraction Maps 51
3.6 Endmember Selection 52
3.6.1 Maximum Noise Fraction
(MNF)
Transform 533.6.2 Pixel
Purity
Index 543.7 Obtaining Sharpening Library 61
3.8Error Metrics 63
3.8.1 Squared Error 63
3.8.2 Effective RMS 64
3.8.3 Effective Edge RMS 64
3.9 Generating Output Images 65
3.9.1 Fusion 65
3.9.2
Unmixing
683.9.3
Sharpening
764.RESULTS 82
4.1 PCvsUNIX 82
4.2 CPUTIME 82
4.4EffectsofScale 86
4.5NumberofEndmembers 89
4.6 EffectsofShadow 91
4.7 VisualEvaluation 103
5.CONCLUSIONS AND RECOMMENDATIONS 113
5.1ConclusionsBasedonQuantitativeData
(Truth)
1135.2ConclusionsBasedonQualitativeData
(Visual)
1145.3 ProposedRevisiontoSquared Error Metric 114
5.4 Recommendations 115
5.4.1 AlgorithmImprovements 116
APPENDIXA: SOLVINGTHE LSE PROBLEM 120
APPENDIX B: SOLVINGTHE LSI PROBLEM 122
APPENDIX C: DATASETS 126
LIST
OF
FIGURES
Figure 1: SpectralBandpassesofTMandSPOT Pan Bands 2
Figure2: BasicMdcture Types 4
Figure3: IllustrationofSuperpixels andSubpixels 5
Figure4: UnmixandSharpen Image Fusion Process 6
Figure5: SharpenandUnmdcImage Fusion Process 7
Figure6: Example Look-Up Table 15
Figure7: Possible Superpixel NeighborhoodsinExtended Regression Method 17
Figure8: Sample Spectra Using Tricorder Algorithm (Clarketal,
1990)
21Figure9: ThreeMaterialMdcturesinTwoSpectralBands 28
Figure 10: Mixture Requiring Negative Fractions 28
Figure 11: IllustrationofSharpening 35
Figure 12: Test Plan Overview 41
Figure13: Forest Test Scene (Color
Image)
44Figure 14: Rochester DIRSIG Scene (Color
Image)
46Figure 15: Band4 (570- 650
nm) ofDAEDALUS Image 47
Figure 16: Band 15 (749
-760 nm)ofHYDICEImage 48
Figure 17: Perfectly Unmixed MaterialMapsfor
Grass, Dirt,
& Deciduous 52Figure 18: Perfectly Unmixed MaterialMapsfor
Grass, Water,
RoofGravel, Loam,
Trees 52Figure 19: Locating Extremain thePixel Purity Index 54
Figure20: ObtainingEndmembersfromPPI Clusters 55
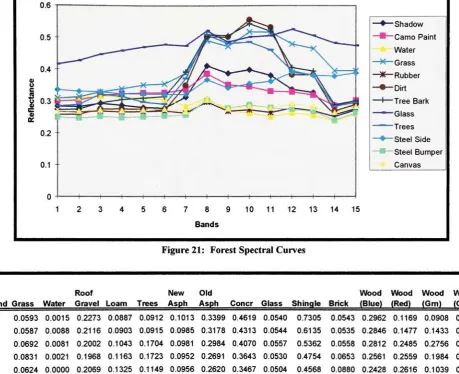
Figure21: Forest Spectral Curves 57
Figure22: Rochester Spectral Curves 58
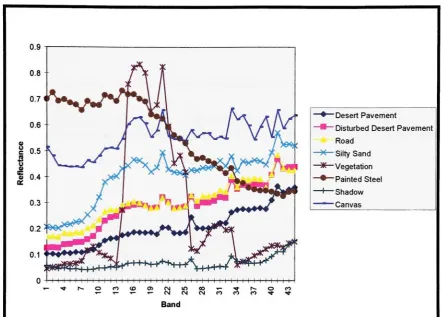
Figure23: DADEALUS Spectral Curves 59
Figure24: HYDICE Spectral Curves 61
Figure25: SpectralCurvesforSharpening Bands
(HYDICE)
62Figure26: ComparisonofOutputfromSimple RatioandGlobal Regression Methods 66
Figure27: FusionProgram Flow Diagram 67
Figure28: Sample Fusion Header 68
Figure29: Stepwise Unmixing Program Flow Diagram 70
Figure30: TraditionalUnmixing Program Flow Diagram 71
Figure31: Sample Unmixing Header 72
Figure 32: Sharpening Program Flow Diagram 77
Figure33: Sample Sharpening Header 78
Figure34: Squared ErrorandRun Times (Forest
Scene)
83Figure35: RMS ErrorsforFusionofForest Image 84
Figure36: RMS ErrorsforFusionofDAEDALUSImage 85
Figure37: RMSErrorsforFusionofRochesterImage 86
Figure 38: Unmixing Forest SceneatVariousResolutions 87
Figure39: Unmixing Rochester SceneatVariousResolutions 87
Figure40: Image EnhancementforForest SceneatVariousScale Factors 88
Figure41: Image EnhancementforRochesterSceneatVariousScaleFactors 89
Figure42: ResultsofTraditionalUnmixingforRochesterScenewithVariousNumbersof
Endmembers 90
Figure44: EffectofShadow Endmember
(FuseAJnmdc)
93Figure45: EffectofShadow Endmember(TraditionalUnmix/Sharpen) 93
Figure46: KeytoForest Scene Fraction Maps 94
Figure 47: Forest Scene Fraction Maps (Stepwise
Unmix/Sharpen)
Without Shadow Endmember...95Figure 48: Forest Scene Fraction Maps (Stepwise
Unmix/Sharpen)
With Shadow Endmember 96Figure49: Forest Scene Fraction Maps
(TraditionalUnmix/Sharpen)
Without 97Figure50: Forest Scene Fraction Maps
(TraditionalUnmix/Sharpen)
With 98Figure 5 1: Forest SceneFraction Maps (Fuse/Unmix
Method)
Without Shadow Endmember 99Figure 52: Forest Scene Fraction Maps (Fuse/Unmix
Method)
With Shadow Endmember 1 00Figure 53: Forest Scene Truth Fraction Maps
(4X)
101Figure 54: Error CalculatedfromShadow ClassMapvsErrorCalculatedfromClass Map
Without Shadow (oneoftwo) 102
Figure 55: Error CalculatedfromShadow ClassMap vsErrorCalculatedfromClass Map
Without Shadow (twooftwo) 103
Figure56: KeytoDAEDALUS Scene Fraction Maps 104
Figure57: Fraction MapsforDAEDALUSImage (Stepwise
Unmix/Sharpen)
104 Figure58: Fraction MapsforDAEDALUSImage(TraditionalUnmix/Sharpen)
104Figure59: Fraction MapsforDAEDALUSImage
(Fuse/Unmix)
105Figure60: Fraction MapsforDAEDALUS Image (Degradedto
4X)
105Figure61: KeytoRochesterScene Fraction Maps 106
Figure62: Fraction MapsforRochester Scene
(Fuse/Unmix)
106Figure63: Fraction MapsforRochesterScene
(Stepwise/Sharpen)
107Figure64: Fraction MapsforRochester Scene
(Traditional/Sharpen)
107Figure65: Rochester Scene Truth Fraction Maps
(4X)
108Figure66: KeytoHYDICE Scene Fraction Maps 109
Figure67: Fraction MapsforHYDICE Image
(Stepwise/Sharpen)
Using One Sharpening Band 109Figure68: Fraction MapsforHYDICEImage
(Stepwise/Sharpen)
Using 110Figure69: Fraction MapsforHYDICEImage
(Traditional/Sharpen)
Using 110 Figure 70: Fraction MapsforHYDICE Image(Traditional/Sharpen)
Using 1 11Figure71: Fraction MapsforHYDICE Image
(Fuse/Unmix)
112Figure 72: Fraction MapsforHYDICE Image (Degradedto
2X)
112LIST
OF TABLES
Table1: Basic ANOVATable 31
Table2:Extra SumOfSquaresANOVA Table 32
Table3: Necessary ConditionstoMinimizeL 37
Table4: M-7
(Forest)
Spectral Bands(jxm)
42Table5: M-7
(Rochester)
Spectral Bands(um)
45Table6: DAEDALUS SpectralBands
(u.m)
48Table7: HYDICESpectral Bands
(nm)
49Table 8: Forest Spectral Library 56
Table 9: RochesterSpectral Library 57
Table 10: DAEDALUS SpectralLibrary
(p.m)
58Table11: HYDICE Spectral Bands
(nm)
61Table 12: SpectralLibraryforSharpening Band
(Forest)
62Table13: SpectralLibraryforSharpening Band
(Rochester)
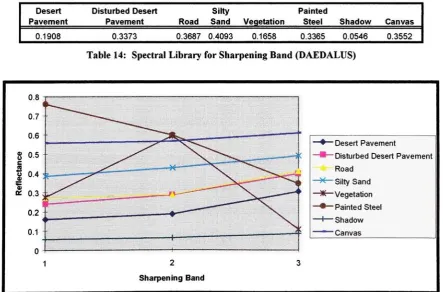
62Table 14: SpectralLibraryforSharpening Band
(DAEDALUS)
62Table 15: SpectralLibraryforSharpeningBands
(HYDICE)
63Table16: DataforForestScene With Shadow Endmember (Uncorrectedfor
Shadow)
126 Table 17: DataforForest Scene With Shadow Endmember (CorrectedforShadow)
127Table 18: DataforForest Scene Without ShadowEndmember 128
Table 19: DataforDAEDALUSscene 129
ACRONYMS LIST
ANOVA AVIRIS DC DIRS DIRSIG ERDvl GIFOV HPF HRP HRXS HYDICE IDL IHS LDP LRXS LSE LSI LUT um MNF MRI MS MSE MSR MSS NIR nm NNLS PC PCA PPI RBV RMS RSI SE SIG SIR-A SPOT SS SSE SSR SWIR TM VISAnalysisofVariance
Airborne Visible/Infrared
Imaging
SpectrometerDigital Count
Digital Image
Processing
andRemoteSensing
Digital Image
Processing
andRemoteSensing
Synthetic Image GenerationEnvironmentalResearch InstituteofMichigan
GroundInstantaneous FieldofView
High Pass Filter
HighResolutionPanchromatic
High Resolution Multispectral
HyperspectralDigital
Imagery
CollectionExperimentInteractiveData Language
Intensity
Hue Saturation Least DistanceProgramming
Low Resolution Multispectral Least Squares
Equality
LeastSquares
Inequality
Look-up
Table Microns (10"6meter)
Maximum Noise Fraction
Magnetic Resonance
Imaging
Mean Square
Mean Square
(Error/Residual)
Mean Square
(Regression)
Multispectral ScannerNear Infrared (Regionof
Spectrum)
nanometers(10"9meter)
Non-NegativeLeastSquares
PersonalComputer
PrincipalComponents Analysis
Pixel
Purity
IndexReturn Beam Vidicon
Root Mean Square
ResearchSystemsIncorporated
SquaredError
SyntheticImageGeneration
Shuttle
Imaging
RadarSystemePour1'
Observationdella Terre
SumofSquares
SumofSquares
(Error/Residual)
SumofSquares
(Regression)
Short WaveInfrared(Regionof
Spectrum)
Thematic Mapper
[image:11.552.89.449.126.653.2]1.
INTRODUCTION
1.1
Spatial
vsSpectral Resolution
Remote sensing instrumentsare capable ofobtaining imageswithhighspatialresolution,orhigh
spectral resolution. Spatialresolution referstohowwella sensor can resolvethespatialdetailsof a scene. Itis
often measured
by
thesensor'sGround Instantaneous FieldofView (GIFOV). The GIFOV istheprojection ofthedetectoraperture, through thesensor'soptics,ontotheground. AsmallerGIFOVreferstoa sensor with
higherspatial resolution. AsmallGIFOVcanbeobtained
by
usinga smalldetector.However,
inordertoobtaina sufficient number of photonsforuseful
imaging,
andtomaintain an adequate signaltonoiselevel,
thedetectormustbesensitive over arelativelywide spectralband. Spectralresolution refersto thewidth ofthe
bandpasswhere radianceismeasured; thenarrower
(finer)
thespectralresolution,themorebandsthatcanbeobtained over a specificspectral range. Toobtainhighspectralresolution,a narrowfilterorgrating isaddedto
thedetector. Inordertoobtain sufficient photonsthedetectormustbe
large,
leading
toalarge GIFOVandlowspatial resolution. Twotypesof remotesensingplatforms arecommonlyused. Onetypecreateshighspatial
resolutionpanchromaticimages
(typically
inthevisible or nearinfraredregion ofthe spectrum),andtheothertypecreates multispectral orhyperspectral imageswithfinespectral resolution.
Therewillalwaysbesometrade-offbetweenspatial and spectral resolution. Imageswithhighspatial
resolutioncanlocateobjects withhighaccuracy,whereasimageswithhighspectral resolution canbeusedto
identify
materials. With differentsensorscollectinginformationoverthesamearea,itisusefultomergethedataintoahybridproductcontainingtheusefulinformationofbothplatforms. Suchahybrid imagewithhigh
1.2
Correlation
Generating
hybrid imagesrequiresalargeamountof correlationinimages. ConsidertheLANDS ATThematicMapper
(TM)
whichhassix spectralbandsinthereflective regionranging from 0.400umto2.350um,andtheFrench SPOTpanchromaticbandwhich rangesfrom 0.5 10umto0.730um. Asshownin Figure
1,
thereisspectraloverlapbetween SPOTandTMbands2and
3,
andthedigitalcountsintheoverlapregion willbe
highly
correlated. Hybridimagesofthesebandswill showdefinite,
accurateimprovementsoverbothoriginalinput images.
However,
fusing
SPOTwiththeinfraredbands (e.g. 5&7)
willbe lessstraightforward.Fusionofthesepoorlycorrelatedbandsrequires predictive modelstoestimatethehigh-resolution data.
TM7
MM
TM5
1
TM4
SPOT Fan
1
TM3
1
TM2
TM1
I
1 1 1 1
0.5 1 1.5
Wavelength
(um)
[image:13.552.132.427.292.518.2]2.5
Figure 1: Spectral BandpassesofTMandSPOT Pan Bands
Mostmultispectralsensorshave bandswhosebandpassesrangethroughseveral regions ofthe
spectrum,
including
thevisible(VIS),
nearinfrared(NIR),
and short waveinfrared(SWIR). Atypicalpanchromatic sensor will cover a much shorterportion,restrictionitselfto theVISorNIR (for example)
differentmethodsforperforming fusion (discussed inthenextchapter)have varying levelsof effectiveness.
Somelevelofoptimizingtoobtainthebestestimatewillalwaysbe involved.
1.3 Mixed Pixels
Theregion ontheground represented
by
one pixelinan image maycontain a number of materials.The definitionofthematerialsdependsonthespecific
imaging
application. Forexample,ifoneislooking
forbroadclassifications,pixelsmay beclassifiedas
forest,
urban,or waterand,exceptalong borders betweenregions,most pixels canbeconsidered100% "pure".
However,
iftheapplicationismorespecific,thesamepixels canbeconsidered mixtures ofdeciduousvs coniferousvegetation,or residential vscommercial,or clear
vssiltywater. Sothedeterminationof whether a pixelismixed or pure oftendependsuponthespecific
application.
It is helpfultodividemixtures of materialsintothreescenarios. Consider firsta situation wherethere
arelinearinteractions betweenthematerialsandincidentphotons. Distinctmaterialsmay bemixed at various
spatial scales. Amixtureis definedas aggregateifmaterials are combined atthemacroscopic scale. Thetotal
radiance
leaving
thesceneisa spatial average oftheindividualmaterials,however,
theindividualmaterialscannotbe spatiallyseparated
by
thesensor. Anareal mixtureisalsocharacterizedby
linearinteractions,
butinvolvessituations whereindividualmaterials canberesolved
by
the(typically
high-resolution)
sensor.Thethirdmixtureinvolvesmaterials combined atthemicroscopiclevel. Thisintrinsicmixture
involvesmultipleinteractions betweenmaterialsandincidentphotons. Theaverage radiancetypicallydepends
ona complex combination oftheindividualmaterial properties. Suchmixtures require non-linear models and
. .,,:... . :..
Intrinsic
Aggregate
Areal
1.4 Scale Factor
Figure 2: Basic Mixture Types
Hybridimagescanbeproduced
by fusing
low-resolutionmultispectralimageswithhigh-resolutionpanchromaticimages. Thepixelsofthelow-resolutionmultispectralimage
(LRXS),
oftencalledsuperpixels,coverlargerareas ofthegroundand correspondtoseveralpixels,often calledsubpixels,ofthehigh-resolution
panchromaticimage
(HRP)
asillustrated in Figure 3. Ifthe twoimageshave been properlyregistered, theneachLRXSsuperpixel correspondstoa collection ofHRPsubpixels equivalentinsizeto thelarger low-resolution
LowResolution
Multispectral
Superpixel
High Resolution
Panchromatic
Subpixels
Figure3: IllustrationofSuperpixelsandSubpixels
ThescalefactorofthefusionreferstothedifferenceintheGIFOV betweentheLRXSandHRP
images. Forexample,considerthecasewheretheGIFOVoftheLRXS is 30mandthatoftheHRP is 10m.
Thenthescalefactor is definedtobe
GIFOV LRXS 30
Scale Factor = = =3
GIFOVHRP 10
Eq. 1
Suchafusionscenariowill produce ahybridimagewith a3-times
(3X)
improvementin GIFOV. This hybridimagecanthenbeusedtocreatedetailedmaterial maps.
1.5
Obtaining
High Resolution Material
Maps
Therearetwostepsincreatingthedetailedmaterialmapspreviouslymentioned.
First,
themultispectral(or
hyperspectral)
imageisusedtoidentify
thematerialsinthescene. Thisprocess,often referredspecific material withinthescene.
Second,
thematerial maps andthepanchromaticimageofthesame areaserve asconstraining inputstoproduce sharpened materialmaps,resulting in high-resolutionmaterial maps.
Onemethod ofimagefusionusestheunmixandthensharpen procedure(See Figure 4). Analternate
method,
theoretically
producing identicalresults,utilizesa sharpen and unmix process. The sharpeningproduces ahigh-resolutionmultispectralimagewhichisthenunmixedintohigh-resolutionmaterial maps. There
is littlepublished work ofimagefusion usinga sharpen and unmix process(See Figure5).
However,
thereareseveralapplications which utilizesharpeningwithoutfurther processing
(unmixing)
ofthehigh-resolutionmultispectral images.
1 1 1 1
J
Low Resolution
ImageCube Low Resolution
V*
U.
High ResolutionUnmix Material Maps
X
"^
if
f
PanchromaticSharpen Image
i
w 144
J
High Resolution Material Maps
Low Resolution
4^
wImage Cube
Sharpen
High Resolution
Panchromatic Image
HighResolution
Image Cube
144
1
Unmix
High Resolution
Material Maps
Figure5: SharpenandUnmixImageFusion Process
1.6 Outline
Thisresearchimplemented image fusionvia a sharpen and unmix process and comparedtheresulting
high-resolutionmaterialmapstothoseobtained viaan unmix and sharpen process. Theunmix and sharpen
process employedtwomethodsfor producingthelow-resolutionmaterial maps. A recentlydevelopedadaptive
unmixingalgorithmwas comparedtotraditionalunmixingmethods.
Sharpening
was performed onthelow-resolution material maps produced
by
the twounmixing algorithms,andtheresultinghigh-resolutionmaterialmaps were comparedto thosegeneratedviathesharpenand unmix process. Allmethods were evaluatedfor
Thisdocumentisorganized asfollows. Sectiontwoprovidesbackgroundreference on variousimage
fusiontechniques. Thespecific methods usedinthisresearcharediscussedinsomedetail. Sectionthree
provides an overview ofthe test method,
including
detailson stepsinvolved intheimageenhancement methods.Thequantitative and subjective results ofthe testsaredetailedin sectionfour. Theresults showthat the
sharpen/unmix method produces more errorthanunmixingwiththeadaptive algorithm andthensharpening.
Fractionmaps created
by
thesharpen/unmix method are morevisuallyacceptable,containingmorehigh-frequency
informationthanfractionmapsproducedby
theunmix/sharpenmethods. Thefinalsectionindicates2. BACKGROUND AND
LITERATURE
REVIEW
Image fusion involvescombining different imagesintoa newhybrid image. Theoriginalimages may
beproducts ofdifferentremotesensingplatforms,andmay have differentspectral and spatial resolutions. For
example,we might wishtomergedataobtainedfromtheLandsat Thematic Mapper
(TM)
withthatobtainedfromtheFrenchSystemePourl'ObservationdellaTerre (SPOT). The TM hasseven spectralbands ranging
from.45to2.35microns. Sixofthebands (1-5and
7)
have 30meter spatial resolution. Theseventhband(band
6)
providesthermalinformationandhas 120meterspatial resolution. SPOT has 3spectralbands inthevisible and nearinfraredregion with20meter spatial resolution. Italsohasa panchromaticbandwith 10meter
spatial resolution. Themost efficient methodforan analysttoexamine
imagery
fromthese twoplatforms wouldbetocombinetheusefulinformation frombothintoa singleimage.
Landsat TMandSPOTare nottheonlytypesofdatathatcanbemerged.
Daily
et al.(1979)
andChavezet al.
(1983)
merged airborne andShuttleImaging
Radar(SIR-A)
imageswithLandsat MultispectralScanner (MSS). LauerandTodd
(1981)
combinedimagery
from Landsat MSSwithdata fromtheReturn BeamVidicon (RBV). Thenextgeneration ofhyperspectralspace-based sensorsis currently inthedesignphase.
Thesesensors willhave highspectralresolution,but verypoorspatial resolution. The pending increase in
sensors willincreasetheneedfor better image fusionapplications.
2.1
Existing
Image Fusion Methods
Thereare severalexistingmethodstoperformimage fusion. Munechika
(1990)
groupsthesemethodsintothreeclasses. The firstclassiscalled
"Merging
Images for EnhancementofVisual Display". Thesealgorithms areprimarilyconcerned withoptimizinganimage
display
sothatit looksgoodfortheanalyst. Themergedata
by
separatemanipulation ofthespectral and spatialinformation. The finalclassiscalled"ImageMerging
toMaintainRadiometric Fidelity". Thesealgorithmsmergedata,
whileensuringthattheradiometricaccuracyoftheoriginal multispectraldata ismaintained ordegraded onlyminimally.
2.1.1
Image
Merging
for Enhancement
ofVisual
Display
Imagefusionroutinesthatenhance visual
display
havealsobeenreferredtoas adhocmethods. Theprimaryconcernistooptimizethe
display
foranalysis purposes. Thereisno concernin preservingtheradiometricaccuracyofthemultispectraldata. Onemethod usedemployshistogramspecification and contrast
stretching. Twoexamples of generic methods are given
by
theequations(Welch&Ehlers,1987)
XSJ
=a:X^XS,
XP
+b,
Eq. 2or
XS|
=a,
x(v^XS;
w2P)
+b:
Eq. 3where
XS;
isthedigitalcount(DC)
fora pixelinthei bandofthehigh-resolution hybridimage, XS;
isthedigitalcountforthecorrespondingpixelintheoriginal multispectral
image,
P isthedigitalcountforthecorrespondingpixelinthehigh-resolutionpanchromatic
image,
w,andw2areweightingfactors,
anda;andb:
arescaling factorstooptimizethehybrid imageforthedynamicrangeofthe
display
system, and isanoperatorwhichcouldbeaddition, subtraction, multiplication,ratio,etc.
Asimpler adhoctechniquetoenhance aRGB
display
istoreplacethegreen channel withthepanchromatic
data,
leaving
theredandbluechannels unchanged. Sincethehumanvisual systemismost2.1.2 Image
Merging by
Separate
Manipulation
ofSpatial Information
Animagecanbeassumedtocontain alow
frequency
andhighfrequency
component. The lowfrequency
datacontainsthespectralinformation,
whilethehighfrequency
datacontainsthespatialinformation.Theimage fusionalgorithmsinthisclass manipulatethespatial(high
frequency)
component whilepreserving thespectral componenttogenerate enhancedimages. Braun(1992)
comparedthreealgorithms ofthisclass.2.1.2.1
Intensity
Hue Saturation
(IHS)
The IHStechnique(Chavez,
1991)
canbeappliedto threebandsof multispectraldata. Threemultispectralbandsaretreatedas colors(e.g.red, green,blue). The RGBmultispectralimage istransformed to anintensity,
hue,
saturationspace,wheretheintensity
isassumedtocontain mostofthespatialinformation,
and thehueand saturation are assumedtocontain most ofthespectralinformation. Thepanchromatic image isthensubstitutedforthe
intensity
ofthemultispectralimage,
and aninversetransformationisperformedtoreturntheimagetoaRGBformat. Theresultisahigh-resolution imagewhose spatial contentis derived fromthe
panchromatic
image,
and whose color(spectral)
contentis derived fromtheoriginal multispectraldata.Thistechniqueis basedontheassumptionthatedgeinformation
(essentially
thespatialcontent) iscontained withintheintensity. The IHStransformationworks as
long
asthepanchromaticimage ishighly
correlated withthebandsofthemultispectralimage.
2.1.2.2
Principal
Components Analysis
(PCA)
The PCAtechnique
(Chavez, 1991)
involvescalculatingtheprincipal component ofthemultispectralimage. Thiscalculation utilizeslinearalgebra,andtransformsa vector of correlateddata intoorthogonal
similarto thepanchromaticimage. The firstprincipal componentimage isreplaced
by
thehigh-resolutionpanchromaticimage. Allremainingprincipal components are assumedtocontainthespectral components and
are untouched. Aninverseprincipalcomponentisthenperformedtoobtain a newhybrid image.
2.1.2.3 High
Pass
Filter
(HPF)
Thehighpassfiltertechnique
(Schowengerdt, 1980)
is basedonthetheorythatanimage iscomposedof ahighpass filtered imageand alowpass filtered image. The hybrid imagecanbeconstructed
by
usingthehigh-resolution imagetoreplacethemissingedgeinformation inthelow-resolution image usingtheequation
HRXSj
=LRXSj
+KJHPAN
Eq. 4where
HRXSj
isthedigitalcount of a pixelinthej"1bandofthehybridmultispectralimage,
LRXSj
isthedigitalcount ofthecorrespondingpixelinthej*bandofthelow-resolutionmultispectral
image,
Kj
isa constantdesignedtocontrolthecontrastofthehybrid
image,
andHPAN
isthedigitalcount ofthecorrespondingpixel inthehigh-resolutionbandusedfortheedge details.
Kj
ischosenappropriatelytoensurethat thecontrastinthehybrid bands isweightedequally
by
thelow-resolutionandhigh-resolution images.2.1.3
Image
Merging
Which
Maintains
Radiometric
Fidelity
Allofthepreviouslymentionedimagefusionmethodsprimarilyenhance visualdisplay. Thespatial
resolutionofthehybridmultispectralimage improvescomparedto theoriginal multispectralimage.
However,
theexactradiometricvaluesofthemultispectralimageare oftenlost intheprocess.
Any
algorithm usedtoidentify
materialsina multispectralimagereliesinherently
ontheaccuracyoftheradiometric values withinthatimage. Inordertoexploittheinformation inthehybrid images
by
use of an automatedroutine, theradiometryofthehybrid imagemust matchascloselyas possibletheradiometryoftheoriginalmultispectralimage. The
2.1.3.1
Ratio Methods
Theratio methods are simpleimagefusion techniquesdesignedtomaintainthe radiometryofthe
originalimage.
They
requirethat thepanchromaticsharpeningimage behighly
correlatedwiththemultispectralimage. Theprocedurebegins
by
dividing
thepixelsofthemultispectralimageintosubpixelswhichare equalinsizetothepixels ofthehigh-resolutionpanchromaticimage.
2.1.3.1.1 Pradines'
Method
Pradines
(1986)
usesthefollowing
equationtomergeSPOTspectralbandswiththeSPOTpanchromaticband:
HRP
HRXS,
-LRXS(
Eq. 51
2.HRP
superpixelwhere
HRXS;
isthedigitalcount of a subpixelinthehigh-resolutionhybrid image inthei*band, LRXSj
isthedigitalcountofthecorrespondingsubpixelin thei*bandofthemultispectral
image,
andHRP isthedigitalcount ofthecorrespondingsubpixelinthehigh-resolutionpanchromaticimage.
2.1.3.1.2 Price 's Method
The disadvantageofthePradinesroutineisthatit doesnotaccountfor bandsthatare not
highly
correlated withthepanchromaticimage. Price
(1987)
proposesatwo-stageprocessfordealing
withbandsthatare eitherweaklyorstronglycorrelated withthepanchromaticimage. Aratioisusedforthestronglycorrelated
bands,
which canbewrittenasLRXS,
=wherea;and
bj
areleastsquares regression coefficients of alinearfit inthei"1band,andHRPS
isthedigitalcount of an averaged panchromaticimagesuperpixel. Theregressioncoefficientsarefound
by
regressingHRPS
againstLRXSj. The high-resolutionmultispectralimage
(HRXS)
isobtainedby
HRXSJ
=a;
HRP +bj
Eq. 7and
LRXS,
HRXS;
= . Eq. 8HRXSi,s
where
HRXS;
isthedigitalcount oftheestimateforthei*bandof ahigh-resolutionmultispectralimage,andHRXSj.s
istheaverage ofHRXS;
overasuperpixel.Braun
(1992)
reportsthatstage 1 ofthePriceroutineproduces results similarto thePradinestechnique.ThemaindifferenceisthatPriceusesan estimateforthehigh-resolutionmultispectral
bands,
whereasPradinessimplyusesthehigh-resolutionpanchromaticimage.
Priceuses a
Look-Up
Table(LUT)
instage2 ofhistechniquefordealing
with uncorrected spectralbands. The LUT iscreated
by
first examiningtheHRPS
values,andrecordingthecorresponding digitalcountinthelow-resolutionmultispectralimage. Themeanofthesemultispectralpixelsiscalculatedandthevalueis
enteredintotheLUT. Figure6showsan example
look-up
table. ThevaluesintheLUTrelatetheHRPS
digitalcountsto themultispectraldigitalcountsintheuncorrelatedbands. Nowthehigh-resolutionestimates are
calculatedusingtheLUTvaluesfor
HRXS'
Average Pan DC
(HRPS)
DCfrom
Weakly
CorrelatedMultispectralBands
(LRXSj)
Mean Low Res Multispectral DC0 8,8,8,7,9,... 8
1 21,24,22,20,23,... 22
2 17,14,13,16,... 15
255
Figure 6: Example
Look-Up
Table2.1.3.1.3 DIRS Method (Simple
Ratio)
Munechika
(1990)
presents a routine whichiseasiertoimplementthanPrice'smethod. Thismethodisdesignedtoprovide as much radiometricaccuracyaspossible,andformsthebasis fortheExtended Ratioand
Global Coefficientmethods which willbe discussed in latersections. Thismethodisused
by
theDigitalImagery Processing
andRemoteSensing
(DIRS)
laboratory
atRITandisoften referredtoastheDIRS Method.Munechika'
s methodbegins
by
pixelreplicatingandblurring
thehigh-resolutionpanchromatic imagesothatitssubpixelsarethesame size asthepixelsofthelow-resolutionmultispectralimage. Thepanchromatic
image isregisteredto themultispectralimagetopreservetheradiometryofthemultispectral image.
Thesimple ratiomethodisgiven
by
theequationHRXS;
=HRP
LRXS;
HRPS
Eq. 9
Thismethod works wellforspectralbandsthatare
highly
correlated withthepanchromaticimage. Itcaneasilybeshownthat thisequationis radiometricallycorrect
by
HRXSs
N
LRXS;
N.
HRPj
IHRP-IPYQ
J= 1 HRPS J
LRXSj
, = i JLRXS-i
= = HRP
N HRPc N
HRPS
which showsthattheaverage ofthedigitalcounts ofthehybrid imageover a superpixel equalsthedigitalcount
ofthecorrespondingpixelintheoriginal multispectralimage.
Munechika'
s methoddoesnot work well on mixedpixels,so an enhancementispresentedin
Munechikaet. al. (1993). Forthecase of a mixedpixel, theratio ofLRXS/HRPsisnotalwaysthebest. Inthis
case,adigitalcountof a panchromatic subpixeliscomparedtothemeandigitalcounts ofneighboring
superpixels. Ifthe
subpixel'
s ratioiscloserto thatof one oftheneighboringsuperpixelvalues, then that
superpixel's meanisusedforthe
LRXS/HRPS
ratioinequation9. Thismixed pixelisnotnecessarilyradiometricallyaccurateon average over asuperpixel,but itsquantitative performance ona subpixel case
exceedsthatofthesimple ratiomethod.
2.1.3.1.4 Extended Ratio
Thesimple ratio methoddoesnot maintain radiometricaccuracy for weaklycorrelatedbands. The
extended ratio methodis designedtodealwiththecase of poor spectral correlationbetweena given
multispectralbandandthepanchromaticband,andisusedinconjunction withthesimple ratiomethod,withthe
ratiomethodimplemented forcorrelatedbands. A liner relationship iscreatedbetweentheweaklycorrelated
band,thepanchromatic
band,
andany previouslypredictedbandasLRXSk
=a0
+a,
HRPS
+a2
LRXSj
+a3
LRXSj
+ ... Eq. llwherekreferstoaweaklycorrelatedmultispectralbandandiand
j
arestronglycorrelated,previouslypredictedbands. Thecoefficientsa0, &\ ,etc. are obtained
by
performingaregressioninalocalizedneighborhood aroundthetargetsuperpixelusingequation 1 1. See Figure 7foradiagramof possible superpixel neighborhoods. The
regressionis firstperformedusingonlyonestrongly correlated/previouslypredictedband. Additional bandsare
Superpixelof Interest Shown
with Subpixels
.-':- *Sps
'
.J-^.-:r
^j^' '' '"..
t-7
;ft "*
.;:^''W
>-^;
-.
^
-Superpixel Neighborhoods
UsedtoCompute Extended
RegressionCoefficients
andResidual Errors
Figure 7: Possible Superpixel Neighborhoods in Extended Regression Method
Oncetheregression equationissatisfied,thecoefficients are usedtodeterminethedigitalcount ofthe
hybrid imagesubpixelsusing
HRXSk
=a0
+a,
HRP
+a2
HRXS,
+a3
HRXSj
+ Eq. 12where
HRXSj
isthedigitalcount of ahybridsubpixelin band i(previously
predictedusingtheratio method).Theadvantage oftheextendedregressionmethodisthatitallowsthehybrid imagetobepredicted
evenfor poorlycorrelatedbands. Inaddition,
by
solving forthecoefficientsinalocalizedregion aroundthetargetsuperpixel,theextended regression methodtends tousesuperpixels withthesame materialtypesasthe
targetsuperpixel. Aproblem withtheextendedregressionmodelisthatitproducesnoisy imageswhen usedin
areas with uniformdigitalcounts.
Any
small changeinasharpening bandor errorsinapreviouslypredictedregression producesimprovedresults overthesimple ratio when usedinregions wherethereismuchbrightness
variation within a materialtype.
2.1.3.1.5 Global
Regression
MethodTheglobal regression methodisdesignedtoovercomesome ofthelimitations oftheextended
regressiontechnique. Ratherthanperforminga regressioninalocalizedwindow around asubpixel,data from
theentireimage isused. Theassumption usedisthatthebest datatosolvetheregressionisfromsuperpixels
withthesame spectral characteristics asthetargetsubpixel.
First,
an unsupervised classifier with alargenumberof classesisusedonthemultispectraland panchromatic images. Aclassmap iscreated with all pixels
classifiedintosome spectral class(notethatno classtypeneedstobeassignedtotheseclasses). Theregression
inequation 11 isappliedusingpixelsthatareinthesame class asthe targetsubpixel. The remainingportion of
theglobal regression routineissimilartothatfortheextended regressiontechnique,withbands
incrementally
added untiltheresiduals oftheregression equation arebelowadesired threshold. Equation 12 isemployedwith
thecoefficients obtainedfromtheregressiontoobtainthehigh-resolutionmultispectralimage.
Braun
(1992)
notesthat theglobal regressiontechnique,onaverage,outperformstheextendedregressionroutine. Theextendedregressionproducesnoisyresultsin low
frequency
areas,whereastheglobalregressionsoftensthenoisewhilepreservingtheedges.
2.1.3.2
Algorithm
Summary
Image fusionworksbestwhenthelow-resolutionmultispectral image bandsare
highly
correlated withthe high-resolutionpanchromaticband. Whenthereisweakcorrelation,thequalityoftheimagefusionwillbe
degraded,
and routinesthatseparatelymanipulatespatialdata may introduceradiometricinaccuracies. TheIntensity
Hue Saturationmethodis insome waystheleastrobustbecause itcanonly beappliedto threebands.separatelymanipulatethespatialdata. ThePriceandMunechikamethodsproduce similar resultsinthe
correlatedbands. Thesimpleratiotechnique
by
Munechika formsthebasis fortheextended and globalregression methods. Theextendedregressionroutine worksbestwhenscenes containhigh
frequency
information,
andtheglobalregressionworksbestwhenthescene contains medium orlowfrequency.2.2 Spectral
Unmixing
Methods
Themultispectralremotesensingplatformtypicallyhaspoor spatial resolution. The largepixel sizes
imply
thatthemajorityofthepixelsinthemultispectralimagewillbemixed. Applicationssuch asmappingvegetation or
locating
mineral resources require suchmixed pixelstobeseparatedintotheindividualconstituents(oftencalledendmembers)whose radiances contributetothesingle mixed pixel value. Spectral
unmixingtransformsthedigitalcounts of mixed pixelsintoa series of maps which are estimates ofthe
percentageor abundance oftheindividualmaterials withina scene.
Spectral unmixing has beenused tomap many differentmaterials. Images fromtheAirborne
Visible/Infrared
Imaging
Spectrometer(AVIRIS)
wereusedtocreateindividualmaps of greenvegetation,nonphotosyntheticvegetation,and soil(Robertsetal 1993). AVIRISdatawas also usedtomap desert
vegetation(Smith 1990). Hyperspectralsensors such asAVIRISare
ideally
suitedtospectralunmixingapplicationsdueto therequirementthat therebemore spectralbandsthanconstituentstobeunmixed.
Spectral unmixingcanclassify images usingscene-derived endmembers or reference endmembers
(reflectancespectra measured
by
fieldorlaboratory
instruments). Whenreferenceendmembersareused,atmospheric compensationandtheresponsivityofthesensor mustbetakenintoaccount.
Twomethods of spectralunmixingare prevalentinavailableresearchliterature. TheSpectral Mixture
AnalysisofSmithet al
(1990)
andRobertset al(1993)
provides estimates ofthepercentages ofendmembersemployingclassicalunmixingmethods,whereastheTricordermethod ofClarketal
(1990)
producesthe2.2.1 Tricorder
Clarketal
(1990)
employa method referredtoasTricordertodeterminetheindividualendmemberswithinthemixed pixels of amultispectralimage. Tricorder issimilartospectroscopicanalysis employed
by
scientists,and employsthesame steps usedtoanalyze a spectrum. Endmembersareidentified
by looking
forspecific absorptionfeatures. Forexample,kaoliniteanddolomitehavecharacteristic absorptionfeatureswhich
Tricordercanlocate inthespectrum ofa mixed pixel.
The
following
definitionof absorptionband depth isemployedby
thealgorithmD
= 1-^- Eq. 13where
Rb
isthereflectanceinthecenter of an absorptionfeature,
andRc
isthereflectance ofthecontinuum atthecenter ofthefeature. Thecontinuumistheshapethespectrum wouldtakeiftheabsorptionfeaturewere not
present.
Typically,
it iscreatedby
simplyconnectingthewings oftheabsorptionfeaturewith a straightline.See Figure8.
The Tricorderalgorithmrequiresthat thedata becorrectedforatmospheric effects. Green et al(1993)
present a methodtocalibrateAVIRIS data foratmospheric effects.
Assuming
thedata iscorrectedforatmosphere,Tricorderusesthe
following
steps.1)
Convolvethelibrary
spectra withthesensor response soitresemblestheimage data.
2)
Converttheimage data from digitalcountstoapparent reflectance.3)
Removethecontinuuminthe
library
andimagespectrausingLr(A)
=^-
Eq. 14CL(A)
and
s m -
S(A)
where
Lc
isthecontinuum-removedlibrary
reflectancespectrum,Listhelibrary
spectrum,Sc
isthecontinuum-removed sensorspectrum,Sisthesensorspectrum,and
CL
andCs
arethecontinuum spectra estimatedfromafitthroughthewingsoftheabsorptionfeature.
REFLECTANCE 0.8 0.6 0.4 0.2 REFERENCE KAOLINITE 0.5 U z o 0.4
fe
0.3 a. 0.2 I0.5 1.0 1.5
WAVELENGTH
(uM)
2.0 2.5
-l 1 l l i I i 1 1
r-q
Reference KaollnlteH
AVIRIS line 404 sample 37J
I L J UJ_
J-Continuum
Band Depth
2.1 2.2
WAVELENGTH (um)
2.3
Theabsorptionfeaturesinthereferencespectrum aretypically strongerthaninthespectrumrecorded
by
theremotesensor,sothespectralcontrast ofthereferencemustbechangedtomatchthecontrast ofthesensor spectrum. Thecontrastofthereferencespectrumismodified
by
Lr
+kLc
= = a +bLc
Eq. 161+k
where
Lc
isthecontrast reduced spectrumthatbestmatchesobservation,k isaconstant,and a=k/(l+k)
andb= l/(l+k).
Thecoefficients a&bmustbe determinedsuchthattheygivethebest fitof
Lc
to theobservedspectrum. Aleastsquarefit isperformedusing
!Sc-blLc
a =
b
=Iii-S^l
'and
1-b
k
= Eq. 17b
where nisthenumberof spectral channelsinthefit. Amaterialmap isproduced
by fitting
a reference spectrumto thespectrumofeach pixelinahyperspectral dataset. The band depth isproportionaltotheabundance ofthe
materialandthegoodnessoffitprovides a confidencefactor.
By
plottingD*R2,
thebrightareas willshowhighabundancewithhighconfidencein thederivedsolution. Amaterialistypicallycharacterized
by
morethanoneabsorption
feature,
so severalfeatures may beusedby
thealgorithm. The features mayalsobeweighted, sothat2.2.1.1
Tricorder
Summary
Clarket al
(1990)
useAVIRIS datatodemonstratetheTricorderalgorithm,and report good success.Thismethod can even create maps of materials with complicated absorptionfeatures (e.g.thekaolinite doublet).
Spectralmixture analysis(discussedin thenextsection)canbeaccomplished without atmospheric
compensation.
However,
theTricorderalgorithm will not work withdatathathasnotbeencorrectedforatmospheric effects. Anothercontrastbetweenthe twomethodsisthefactthatunmixingwiththeTricorder
algorithmmay only beperformedonhyperspectral
data,
whereasspectral mixture analysis canbeperformed(withalimitednumber ofendmembers)on multispectralimages. Tricorder isalsolesssensitivetosignalto
noisein individualchannelsbecause manychannels are usedto mapan absorptionfeature. An inexperienced
usercannotsimplystartworkingandachievingsuccessful resultsbecauseexpertknowledgeofspectroscopy
by
theuserisrequiredforthisalgorithm. Tricorderwas notimplemented forthiswork.
2.2.2
Spectral Mixture Analysis (Traditional
Unmixing)
Spectralmixture analysisassumesthatfora multispectral
image,
thespectral variationis duetoa smallnumber ofendmembers. Theseendmembers allhave differentreflectance spectra andthedifferences inthe
spectra serve as
"fingerprints"
to
identify
thedifferentmaterials. Inthecase of areal and aggregate mixtures,itispossibletoproducealinearmixture oftheseendmembersthatcloselymatchestheobserved spectra measured
by
thesensor. For Nendmembers, thisbecomesLSesora)
=XLe(A)fe
Eq. 18e=1
where
Lsensor(^)
isthespectral radiancereachingthesensor,fe
isthefractionof endmember e withinthepixel.and
Le(^)
isthespectral radiance ofthatendmember.DCj
=gj-Lj
+bj
Eq. 19and
Li
=iLsensorU^.a)^
Eq. 20
where
DC,
,g;andbj
arethedigitalcount recordedby
thedetector,
gain ofthedetector,
andbias forthe i"1spectral
band,
(3j(A.)
isthedetector'sspectralresponsivity,andLj
istheeffective radiance"seen"by
thesensor.Notethat themeasured radianceisaffected
by
thespectral response ofthesensor.Combining
equations 18and20,
i,-Jl
,Le(A)fey3(A)dAev ' e 'N j.
L,
=2>e
JLe(A)B,(A)dA
e=lX
N
Li
=2X,ife
i = !--k Eq. 21e=1
where
Lei
istheeffective radiance ofendmembere measuredinthef1bandofthe sensor,andk isthenumberofbands.
Theeffects oftheatmosphere can oftenberemoved. Greenet al
(1993)
present a method ofcalibrating AVIRIS datatoeliminate atmospheric effects. When digitalcounts are correctedforatmospheric
effects,spectral mixture analysismay be done intermsoftheapparent reflectance oftheendmembers
DC,
=giR,
+b,
Ri
=2X,i
f
Eq. 22e=1
th
where
R.ti
istheeffective reflectanceof endmember einthei spectralband.Spectralmixtureanalysis produces equivalent resultsifcalculations are performed intermsof radiance
Spectralmixtureanalysisisperformedusingthe
following
equationN
LRXS;
=XRe,i
fe
+i
i=l....k Eq. 23e=1
where
LRXS,
isthedigitalcountinthei"1spectralband, fe
istheunknownfractionof endmember einthepixel,Rei
isthereflectanceof reference endmember einthei*band (obtained fromalibrary
ofendmembers), j istheerrorin band i forthefitofNendmembers,andk isthenumber ofbands inthelow-resolution image. Spectral
mixture analysis requiresthat theleastsquaresfittoequation23be"good"
(AgoodfitoccurswhentheRMSof
thee,valuesis approximatelythesamemagnitude asthesensor noise). Theerroris duetotheresidualvariance,
andisa measure ofthespectralvariationnot predicted
by
themodel.ThegoalistocalculatetheNunknownfractions. Equation 23 istheavailable equation and provides a
constraint onthenumberof endmembersthatcanbeunmixed orthenumber ofbandsrequiredinthe
multispectralimage. Sothenumber of endmembers mustbek>N.
Using
LANDSAT TMas anexample, themaximumnumberofendmembersthatcanbeunmixedis6 (k=6). This isa rather small number of possible
endmembers and explainswhy hyperspectralsensorsare much more suitedtounmixingapplicationsthan
multispectralsensors. Themultiplebandsofthehyperspectralsensor(e.g.224 bands for
AVIRIS)
areideal foruse withunmixingequations.
Smithet al
(1990)
useatwo-stepprocess wheretheimageismodeled as mixtures ofimage derivedendmembersandthentheimageendmembersaremodeled as mixtures of reference endmembers. Image
endmembersare often amixtureofothermaterials and are selected suchthata minimum number of reference
spectracombinetodescribethem. Forexample,animageendmembermay actually becomposed of407c
vegetationand60%soilbecauseno pure pixels of vegetation or soil are presentinthescene. Inthesecondstep
oftheprocessthefractionsofthisimageendmemberwouldbeunmixedintofractionsof reference spectrafor
soil andvegetation. Imageendmembersare expressed aslinearmixtures of reference endmembersinthe same
are convolved withthebandpassofthesensorbandstoensureaccurate comparisonbetweentheimage
endmembers andthereferenceendmembers.
Smithet al
(1990)
usea shade endmembertoaccountfor shadingand shadows. Thefractionimagebasically
reflectslighting
andtopographyvariationsintheimage. Tocompensateforpossible anticorrelationbetweenvegetation/soilfractionsandtheshade
fractions,
allfractionsexceptshade are re-scaledtosumtounity,pixel
by
pixel. Forexample,a vegetationendmembermay bescaledusingf
Vfs
= Eq. 24(l"fshade
>where
Vfs
isthescaled vegetationfraction,
fvcg
istheoriginal vegetationfraction,
andfshade
istheshadefraction.Thisprocessremovesonlytheshadefraction fromthepixel. The scaling iscorrectassumingshadeis equally
presentamongalltheendmembers. For
display
purposes,thecomplement oftheshadeimage(l-fShade)
iscombined withthe
Vfs
imagetoproduce animagewhich matchesobserverintuition (e.g. highshadefractionsappeardark).
Iftwoor more endmembers arecloselyrelated(e.g.differenttypesofsoils),thesameprocedurefor
normalizing forshadecanbeusedtoemphasizethefractions betweenthesecloselyrelated endmembers. For
example,giventwodifferentsoilendmembers,(Saand
Sb),
a scaledfraction forsoil endmemberSacanbegenerated
by
fSa
Saf = Eq. 25
(fsa+fsb)
where
Safs
isthescaledfraction forendmemberSa. Highervalues ofSafs
indicatean abundance of soiltypea,andlow fractions indicatemore of soiltypeb. Thisprocess canbeused with equation22toproducefraction
2.2.3 Constraint
Conditions
Thepreviousdiscussionpresentedspectral mixture analysis as an unconstrained problem.
However,
theliteraturecontainsthreedifferentconstraint conditions. Thefirst isunconstrained,aspreviouslypresented,
wherefractions mayassume whatever valueisneededtoproduce an estimate with minimum error. Thesecond
conditioniscalledpartiallyconstrained.
Here,
thesum of allthefractionswithin a pixel mustbeunity.N
2X
=1
Eq. 26e=1
providingoneequalityconstraint. Positiveand negativefractions may begenerated
by
bothunconstrained andpartiallyconstrained unmixing. The
fidly
constrainedconditionleviestheadditional requirementthatallindividualfractions lie betweenzero andone.
fe
=1,
(0<fe<l)
Eq. 27e=1
providing 2*N
inequality
constraints.Althoughthe
fully
constrained situation seemstobethebestmethodbecause itmatchesintuition,
thenegativefractionsreturned
by
thepartiallyconstrained casedo havephysical explanations. Thefollowing
examplemay illustratethispoint. Figure9 illustratesmixtures ofthreematerialsintwospectralbands. The
reflectanceineachbandisplottedalongtheaxes. Thevertices ofthetrianglearelocatedatthereflectance of
purepixels ofthe threematerials. Mixturesofthe threematerials with positivefractions arelocated alongand
withintheperimeter ofthe triangle. Forexample,a50/50mixture of materials 1 and2materialslies midway
"
Band 2
Band
1
Figure9: Three Material Mixtures in Two Spectral Bands
Figure 10 illustratestheresultsduetorandomvariation. Althoughendmembers are plotted as specific
points,they trulyrepresentthemean vectors. Ifthereal materials are gaussiandistributedaboutthe mean, then
thecontours plottedin Figure 10representequally
likely
departures fromthemean values.Band 2
Band 1
Supposea particular pixel contains endmembers whose reflectance values are represented
by
thevertices ofthesolidtriangle. Thepossible mixturesforthispixelliewithinthesolidtriangle. Notethat thepointdenoted
by
"X"lieswithinthesolidtrianglebutoutsidethe triangleformed
by
thereference endmembers. Themixtureisa validone,butrequires negativefractionsinvolving
thereference endmembers.2.2.3.1 Spectral Mixture Analysis
Summary
Smithet al
(1990)
useLandsat TM dataforspectral mixture analysis. The relativelysmall number ofbandsdoesnot allow unique spectralidentifications.
Many
materials,measuredthroughtheTM bandpass filters areindistinguishable from manymixtures ofreferenceendmembers.Typically,
thereisno unique set of endmembers which combinetomatchthemultispectral data. This issimilartothemetamerfoundincolor science. Spectral unmixingworksbestwhen appliedtomany bandsofdataasinthehighspectral resolution of hyperspectralimagery. Spectral mixing is bestapplied whenthereisnointeraction betweenscene elements(i.e.thelinear mixingmodel applies). Whennon-linearmixing ispresent, other methods mustbeemployed. The shadeendmembercan accountfor shadingandtopographicconditions. Sincemuch ofthevariancein TM imagesis duetoshadingandshadows,thecomplementoftheshadeimagecan approximatethetopographyof a scene.
2.3
Image Fusion Via Stepwise
Unmixing
andSharpening
Gross
(1996)
proposesanimprovedimage fusionmethodbasedon stepwise regression. Aendmembersin everypixel. Grossimplementsanewmethod whichadaptivelyestimatestheendmembers
within eachpixel,andsolvesforthefractions forthen endmembers withinthetargetpixel.
2.3.1
Stepwise
Unmixing
Thestepwise method requiresthatforeachpixel,a
library
ofLendmembersbesearchedforthenendmembersthatareinthatpixel. Theseendmembersarethosethatminimizetheerror. Theoutputisthe
fractions forthen endmembersforthetargetpixel. Ingeneralterms,a predictive equation oftheform
A
y
=Ax
Eq. 28isused,where y istheestimated spectral vectorforthepixel,Aisthematrix of reflectancevalues,and xisa
vectorcontainingthefractions. Themain
difficulty
instepwise regressionisthat n, thenumber of endmemberstobeunmixed within asuperpixel,isunknown. Ifnischosentobetoo
large,
over-fittingoccurs andthesolutiontracks thenoiseinthedata. Not only mustthecorrect number of endmembersbeused,butthemost
appropriateendmembers mustbeusedaswell. Thiscouldbe done employinga searchthroughLof allthe
possiblecombinations,butthismethodis computationallyprohibitive. Suchastrategy involves searching
I!
through combinationstoobtaintheoptimum endmembers. As thesize ofthe
library
increases,
this n!(l-n)!numbergrowslargequickly,requiring largeamountsof computer resources. Thestepwise method employed
by
Grossoffersaless computationallyprohibitive method.Considerthebasic ANOVAtableillustratedin Table 1. Such anANOVAtableistypicallyformedto
analyzethevarianceina predictive modelinto itscomponentparts: onedueto therelationshipwiththe
predictorvariable(s),and oneduetoerror. Definethemodel asinequation
28,
andlet y beanm-vector,x ann-vector,andA an mx nmatrix. Thefirstcolumnin Table 1 containsthevariation source. Thesecond column
(SS). ThedegreesoffreedomandtheSumofSquaresare referredtoas
"corrected"
becausethemeanofy is
subtractedfromthemeasurements. The fourthandfifthcolumn showuncorrecteddegreesoffreedomandhow
tocalculatetheSSinmatrix notation. The Mean Square
(MS)
,inthefinalcolumn,iscalculatedby
dividing
theSS
by
theappropriatedegreesoffreedom.Source df SumofSquares df SumofSquares Mean Square
(MS)
(corrected)
(SS)
(uncorrected)
(SS)
(Matrix
Form)
Regression n-1
X(y,
-y?
(corrected)
n SSR= x'A'y
MS(Regression)
=i>MSRMSR=
SSR/(n-l)
Error m-n
X(*
-y,)2
m-n SSE= y'y
-x'A'y MS
(Error)
=>MSEMSE=
SSE/(m-n)
Total m-1
X(y,
-y)2(corrected)
m y'y
(uncorrected)
Table 1: BasicANOVA Table
Iftheregression modelisa goodone,andtheerrors are gaussianwithzeromean,then theerrors
shouldbechi-squaredistributed(X). Iftheregressionmodelispoor, thentheerrors will notbechi-square
distributed. Ahypothesistestcanbeusedbasedontherelationshipthattheratio oftwochi-square variables
divided
by
theirdegreesoffreedom hasanF-distributionasinXlln
Eq. 29
where m and ndenotethedegreesoffreedomforthe twochi-squarevariables.
NowconsidertheSSRandSSE. Iftheerrorsaregaussian,thenSSRandSSEareX distributed
SSR
= MSR
"n-1
SSE
mn
andtheratio of
= MSE
2
m-n
Eq. 31
F =
MSR
MSE
Eq. 32
willfollowan
Fn.lm.
distribution. The MSR/MSEratioisformedand comparedtoatabulatedF-statisticwithn-1and m-ndegreesoffreedomatthedesiredconfidencelevel. Iftheratioisgreaterthan thevalueinthe
F-statisticstable,thentheregression modelisa good one. Iftheratiois lessthanthevalueinthetable,then the
regression modelisrejected(thismodel would not explain enough ofthevarianceto
justify
usingit)
and abettermodel shouldbeused.
Stepwiseregressionis basedon anANOVAcalculation ofthe"Extra Sumof
Squares"
(Draper&
Smith,
1981). Inthismethod an n-term modeliscompared with an(n-l)-termmodel todeterminethesignificance
(benefit)
ofaddingtheadditionalterm. Definethereduced-ordertermasy
=Wz
; z =
(W'Wy'W'y
Eq. 33where zisan(n-l)-vectorandWisan m x
(n-1)
matrix. The SSandMSare calculated as shownin Table 2.Source df
(uncorrected)
SS MSRegression
Reduced Model n-1 x'A'y
-z'W'y
Extra Term 1 z'W'y M^extra_ierm
Error m-n y'y
-x'A'y MSE
Total m y'y
(uncorrected)
AswiththepreviousANOVA table,thesumof squares are7C1distributed. Theratio of
MSextra_term/MSE iscomparedto thevaluein aF-statistictablewiththeappropriatedegreesof
freedom,
atthedesiredconfidencelevel. Iftheratioisgreaterthan thetabulated value,thentheregressionmodelisvalid,and
themore complex modelisrequired. Iftheratioissmaller,then thesimpler modelisretained. Inpractice,a
F-statisticstableisnotused,and afixedvalue ofF-to-enterandF-to-removeisused regardless ofthedegreesof
freedom ina particular model
being
examined.2.3.1.1
Stepwise
Unmixing
Summary
Stepwiseselection ensuresthat the
finally
selected subset containstheproper number and mostappropriate endmembersfromthereferencelibrary. Thismethod canmapa greater number of endmembers
than traditionalmethods,and can also prevent extraneousfractions from
being
over-fitto theimagenoise.2.3.2
Constraints
Aftertheappropriateendmembers areselected,unmixing may beperformed unconstrained(as
previously
described),
or with constraints. Ifconstrainedunmixing isdesired,
thefinalanswerisobtainedthrougharestrictedleastsquares,
involving
linear equalityandinequality
constraints,2.3.2.1
Equality
Constraints
Oncethenumber ofendmemberstobeexaminedisselected,then theremainingconstraintsmustbe
appliedtosolvethepredictiveequation28. Thesolutionistheonethat minimizestheerror
A
=
(y-y)2
subjecttoequalityconstraints,which reducethenumber offreevariablesinthesolutionspace. This least
squares problem canbesolvedusing linearalgebra.
A linearalgebra solutionto theconstrainedleastsquare problemispresented
by
Lawson& Hanson(1974):
Givenanmixn matrixC ofrankp,an mj-vector
d,
an m2X n matrixA,and anmi-vectorv,minimizeI ly-A.vl IsubjecttoCx=d.
Thesolution existsifandonly iftheconstraint condition(Cx=
d)
isconsistent. If consistency isassumed,thenn >p=rank(C). Thesolutiontotheleastsquareequality
(LSE)
problemisperformedinthreestages:1. A lower-dimensionalunconstrainedleastsquare problemis derived fromtheoriginal constrained
problem.
2. The derivedproblemissolved.
3. Thesolutionistransformedto theoriginal coordinate systemtoobtainthesolution oftheoriginal
constrained problem.
SeeAppendixAfor detailson solvingtheLSEproblem.
2.3.2.2
Inequality
Constraints
Lawson& Hanson
(1974)
alsopresenta solutionto thelinearleastsquare problem withlinearinequality
constraints:Givenanmxn matrix
G,
anm-vectorh, anm2 x nmatrixA,and an m2-vectorv, minimize\\y-Ax\\subjecttoGx>h..
Whileequalityconstraintsreducethenumberoffreevariablesintheleastsquareproblem,
inequality
constraintsestablishboundarieswithinthesolutionspace. Aniterativesolutionisrequiredto
identify
active constraints andrestrictthoseaffected variables. Oneachiteration,theactive constraintsaretreatedasequalityconstraints and a
minimumis derivedaspreviously described for equalityconstraints. See Appendix B for detailson solvingthe
2.3.3
Sharpening
Gross
(1996)
proposes a method wherefractionscontained withinlow-resolution fractionmaps arespatially locatedto theresolution of ahigherresolution
image,
througha process called sharpening. See Figure1 1foranillustrationof sharpening.
Low Res Pixel
M.l'^.l'^J
High Res Superpixel
, M,6'^2,6'^3,6
w3
wk.
w
SUPERPIXEL
S
=9 SUBPIXELS
Figure 11: Illustrationof
Sharpening
The sharpeningmodelhasthesameformas spectralmixtureanalysis.
HRPj
=Rpan,efe,j
+^ J=L.-S Eq. 35j=l
where
HRPj
isthedigitalcountinthei"1
spectralband forthej"1subpixelofthehigh-resolutionpan
image, Rpane
isthereflectanceof reference endmember einthesharpeningpanband(s),and
fej
isthehigh-resolution fractionThere isalso aconsistencyrequirementthattheaverage ofthehigh-resolution fractionsforeach endmember
equaltheoriginallow-resolution fractionas
1 5
Xfe,j
=fe
e=l....n Eq. 36s
j=i
wheref. istheoriginallow-resolutionfraction.
Sharpening
mayalsobeperformed unconstrained(as previouslydiscussed)
or with constraints.Partially
constrainedsharpeningprovides sequalityconstraintsn
Xfe.j
= ! j= 1----S Eq. 37e=1
However,
only(s-1)
areindependent.Fully
constrainedsharpeningprovides2*n*sconstraintsn
Zfe.j
=0,
(0
<feJ
<l)
j=l....s Eq. 38e=1
The equalityconstraintsare not allindependent. Thereare more unknownsthanequations,sothesharpening
modelissolved as an under-determinedleastsquares problem. Theorthogonaldecompositionmethod canbe
usedtoprovidea solution. The
fully
constrainedsharpeningproblem requires aniterativesolution,and anoptimization algorithm appliesonlytheactiveconstraints,aspreviously described for solving
fully
constrainedunmixingproblems.
Sharpening
may besolved withLagrangemultipliers.Using
Lagrangemultipliers, thefunctionA
F(x)
=(y-y)
istobeminimized subjecttosequalityconstraints,h;(x)
=C; , (i =
1...S)
Eq. 39Anaugmented
function,
called theLagrangian,canbe formedhaving
thesame minimum asF(x)
L(x)
=F(x)
+ X(H(x)-C)
Eq. 40whereXisavectorofLagrangemultipliers andthequantity
(H(x)-C)
mustbezero attheminimum. TheTable 3:
Necessary
ConditionstoMinimizeLFor thepreviously defined leastsquaresproblem, thefunctiontobeminimizedis
F(x)
=(y-y)2
=
(y-Rx)2
subjecttoconstraints,
H(x)
=Hx-C
whereH isa s x nmatrix,cisa p-elementvector,and xisan n-element vector.
Recalling
equation40,
thenEq. 43
Eq. 44
L =
-2R'(y-Rx) + H'A = 0 dx
and
dX
L
=
Hx-C
=0
Inmatrix
form,
thisbecomes2R'R H'
H 0
2R'y
C
The firstmatrixinequation47canbe invertedtosolveforx and
X,
producingEq. 45
Eq. 46
Eq. 47
(R'R)
'-WH(R'fl)
' WR'y
[H(R'R)]H']
H(R'R)
'H']
\[
CwhereW=(RTR)"1HT[H(RTR)~IHT]"1,andthemultiplier nowaccountsforthefactorof2. Then
x =
xu
+W(y-Hxu)
Eq. 49wherexu =
(RT<)"
R'y
istheestimator ofhigh-resolutionfractions.2.3.3.1
Sharpening Summary
Sharpening
takes thelow-resolutionfractionmaps and enhancesthem,whereverpossible,by
spatiallylocating
thmaterialstothesame resolutionasthesharpening band(s). Itoffers awayofimproving
thequality3.
APPROACH
Theavailableliterature indicatesthatmostimage fusionalgorithmtechniqueshave only beenevaluated
in
isolation,
andthatdifferentroutineshaveseldombeencompared with each other. Thisresearch comparedtheresultsofthesharpen(fuse)/unmixprocedure withthoseproduced
by
theunmix/sharpen process. Theunmixalgorithms evaluated weretheadaptive stepwiseleastsquares method andthe traditionalleastsquares method.
3.1
Use
ofSynthetic
Imagery (SIG)
Comparisonofthe twoimage fusionprocesses canbeadifficulttask.
Therefore,
it isusefultoperformtheprocedureson a set ofimageswhoseradiometric, geometric,and spatial properties areknownand canbe
controlled. Synthetic ImageGeneration
(SIG)
is ideal forsuch an application. The Digital ImageProcessing
andRemote
Sensing
Synthetic Image Generation(DIRSIG)
model used atRIT issuchanimagegenerationsystem. DIRSIGisaraytracingalgorithmwhichcalculates radiometric signaturesusingafirstprinciples
approach. Itcanmodelsuch processesas upwelled anddownwelledradiance, shadowing,and various
interactions betweenscene elementsandtheenvironment(earthandsky)overtherangefrom 0.28to20.0|i