ABSTRACT
HU, WENHAO. Statistical Inference for Model Selection. (Under the direction of Eric Laber and Leonard Stefanski.)
Penalized regression methods that perform simultaneous model selection and estimation are
ubiquitous in statistical modeling. The use of such methods is often unavoidable as manual
in-spection of all possible models quickly becomes intractable when there are more than a handful
of predictors. However, such automated methods may fail to incorporate domain-knowledge,
exploratory analyses, or other factors that might guide a more interactive model-building
ap-proach. A hybrid approach is to use penalized regression to identify a set of candidate models
and then to use interactive model-building to examine this candidate set more closely.
In Chapter 1, to identify a set of candidate models, we derive point and interval
estima-tors of the probability that each model along the solution path will minimize a given model
selection criterion, e.g,. AIC, BIC, etc., conditional on the observed solution path. Then models
with a high probability of selection are considered for further examination. Thus, the proposed
methodology attempts to strike a balance between algorithmic modeling approaches that are
computationally efficient but fail to incorporate expert knowledge, and interactive modeling
ap-proaches that are labor intensive but informed by experience, intuition, and domain knowledge.
We envision this approach as being useful in at least two ways: (i) it facilitates interactive,
expert-knowledge driven exploration of high-quality candidate models even when the initial
pool of models is large; and (ii) it provides valid conditional prediction sets for a data-driven
tuning parameter given the observed design matrix and solution path, that is applicable for a
large class of tuning parameter selection methods.
In Chapter 2, we derive an estimator of the false selection rate for each model along the
solution path using a novel variable addition method. The proposed estimator applies to both
facil-itate interactive model exploration. We characterize the asymptotic behavior of the proposed
estimator in the case of a linear model under a fixed design; however, simulation experiments
show that the proposed estimator provides consistently more accurate estimates of the false
selection rate than competing methods across a wide range of models. With estimated false
selection rates, one may be able to label the solution path with operating characteristics that
are meaningful in a domain context.
In Chapter 3, we describe the developed R package and shiny app. The developed R package
IntVSimplemented the described pseudo-variable methods and built a interactive solution path
using shiny. It allows users interact with solution path of penalized models and observe model
information, e.g., coefficient estimates, false selection rates, AIC and BIC. Besides of the R
package, a shiny website is also built for broader usage. Using the website, users may upload
©Copyright 2018 by Wenhao Hu
Statistical Inference for Model Selection
by Wenhao Hu
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Statistics
Raleigh, North Carolina
2018
APPROVED BY:
Yichao Wu Arnab Maity
Eric Laber
Co-chair of Advisory Committee
Leonard Stefanski
DEDICATION
BIOGRAPHY
The author was born in Yueyang, Hunan, China in September 1991. In 2009, he was admitted
to Sun Yat-sen University (SYSU), where he spent four years on studying Mathematics and
Statistics. In 2010, he met his wife Qian Guan, who was his classmate. After receiving Bachelor’s
degree of Statistics from SYSU in 2013, he attended North Carolina State University for a Ph.D.
in Statistics. Under the direction of Dr. Eric Laber and Dr. Leonard Stefanski, he will complete
ACKNOWLEDGEMENTS
First of all, I would like to express my deepest gratitude to my advisors Dr. Eric Laber and Dr.
Leonard Stefanski for their continued support and great mentoring. Without their inspiration
and help, this thesis would not be possible. Their passion to research and science set good
examples for me. It is a great experience with them.
I would also like to thanks my committee members Dr. Yichao Wu and Dr. Arnab Maity
for their thoughtful comments. I also thanks Dr. David Skaar for kindly serving as graduate
school representative in my committee.
I would also like to extend my appreciation to all professors in Department of Statistics
at NC State. Dr. Howard Bondell, who was the DGP, served as committee member in my
Oral Preliminary Exam. Dr. Jung-Ying Tzeng, my academic advisor during my first year of
study, provided me valuable guidance. Dr. Wenbin Lu who served as current DGP provide me
tremendous help on graduate studies. I also thank all the great staff in the department.
I would like to thanks all mentors during my internships. At Merck, Dr. Shuyan Wan and
Dr. Frank Liu guided me the research on missing data imputation. At QuantLab, Dr. Areez
Moody taught me how to develop quantitative strategies for trading and understand financial
market. And at SAS, Arin Chaudhuri and Gul Ege provided me suggestions on coding, research
and presentation. Those experiences are invaluable to me.
Thank all my friends and fellow students at NC State and Laber Labs. Thank you!
Last but not least, I could not come this far without the support of my family. My Mom
and Dad are always supportive with their whole hearts. My wife, Qian Guan, have always been
TABLE OF CONTENTS
LIST OF TABLES . . . vii
LIST OF FIGURES . . . .viii
Chapter 1 Assessing Tuning Parameter Selection Variability in Penalized Re-gression . . . 1
1.1 Introduction . . . 1
1.2 Penalized linear regression . . . 3
1.3 Estimating the conditional distribution of ˆλGIC . . . 4
1.3.1 Conditioning on the solution path . . . 4
1.3.2 Exact distribution of ˆλGIC|(S,b X) . . . 5
1.3.3 Limiting conditional distribution ofbσ20 . . . 7
1.3.4 Bootstrap approximation to the distribution of ˆλGIC|(S,b X) . . . 9
1.4 Simulation Studies . . . 9
1.5 Illustrative data examples . . . 13
1.5.1 Pollution and mortality . . . 13
1.5.2 ATV drug resistance . . . 14
1.6 Conclusion . . . 19
1.7 Proof and Technical Details . . . 20
1.7.1 Theoretical results for high dimensions . . . 27
Chapter 2 Variable selection using pseudo-variables . . . 30
2.1 Introduction . . . 30
2.2 Methods . . . 33
2.2.1 Setup and notation . . . 33
2.2.2 Estimating the false selection rate . . . 34
2.2.3 Computation of pseudo-variables . . . 36
2.3 Simulations . . . 37
2.4 Illustrative examples . . . 39
2.4.1 Prostate cancer data . . . 39
2.4.2 Leukemia cancer gene expression data . . . 42
2.5 Conclusion . . . 43
2.6 Proof and Technical Details . . . 45
2.6.1 Proof of error rate estimation with permutation added . . . 47
Chapter 3 IntVS: An R package for estimating false selection rates in penal-ized regression and interactive variable selection . . . 49
3.1 Introduction . . . 49
3.2 Methods . . . 50
3.3 The R packageIntVS . . . 51
3.3.3 Example 3: Estimate False selection rates in SCAD . . . 53
3.4 The shiny website . . . 54
3.4.1 De-biased estimator for Lasso . . . 56
3.4.2 Selective inference . . . 56
3.5 Conclusion . . . 57
BIBLIOGRAPHY . . . 59
Appendices . . . 64
Appendix A Appendix for chapter 1 . . . 65
A.1 Simulation results . . . 65
A.2 Additional results for real-data . . . 67
Appendix B Appendix for chapter 2 . . . 68
B.1 Simulation results forα= 0.1,0.3 . . . 69
B.2 Simulation results without adding permutation . . . 73
B.3 Simulation results for logistic model . . . 75
B.4 Simulation results for Cox model . . . 78
B.5 Pseudo-variables algorithm for screening . . . 81
B.5.1 Theoretical properties . . . 82
LIST OF TABLES
Table 1.1 Discovery rate for p= 20, n= 50 . . . 11
Table 1.2 Discovery rate for p= 100, n= 200 . . . 12
Table 1.3 Coverage Probability. Results are based on 10,000 replicated data sets . . . . 12
Table 1.4 Estimated conditional distribution of the tuning parameter for the mortality rates data. Both the asymptotic normal approximation and the bootstrap had only two support points,{124.21,288.20}. . . 14
Table 1.5 Estimated conditional distribution of the tuning parameter for ATV drug resistance data. . . 17
Table 3.1 Main functions in the R package IntVS . . . 51
Table A.1 Discovery rate for p= 20, n= 50; τ = 0.1 . . . 65
Table A.2 Discovery rate for p= 100, n= 200; τ = 0.1 . . . 66
Table A.3 Discovery rate for p= 20, n= 50; τ = 0.2 . . . 66
Table A.4 Discovery rate for p= 100, n= 200; τ = 0.2 . . . 66
LIST OF FIGURES
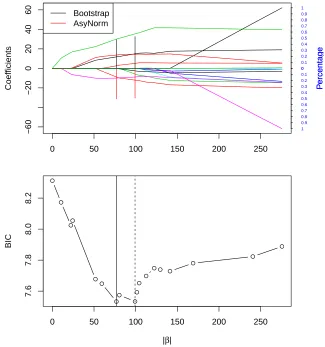
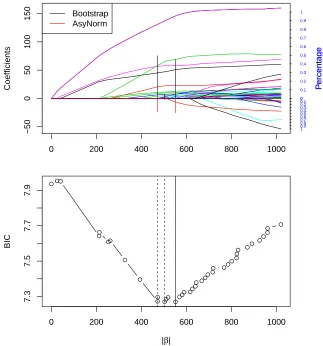
Figure 1.1 The top figure shows LASSO solution path of mortality rates data; The vertical lines above and below x-axis correspond to the distribution estimated by bootstrap and asymptotic normal approximation respectively. The bottom figure shows BIC values for candidate models along solution path. The solid vertical line corresponds to the model with six variables and smallest BIC value. The dashed vertical line corresponds to a model with eight variables. . 15 Figure 1.2 The top figure shows forward stepwise regression solution path of mortality
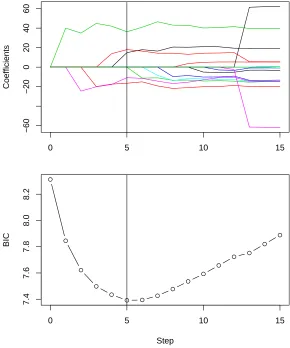
rates data; The vertical line corresponds to the model which minimizes BIC. The bottom figures shows BIC values for candidate models along solution path. The solid vertical line corresponds to the smallest BIC value. . . 16 Figure 1.3 The top figure shows LASSO solution path of ATV drug resistance data;
The vertical lines above and below x-axis correspond to the distribution estimated by bootstrap and asymptotic normal approximation respectively. The bottom figure shows BIC values for candidate models along solution path. The solid vertical line corresponds to the model with fifteen variables and smallest BIC value. The dashed vertical lines correspond to model with twelve and ten variables. . . 18
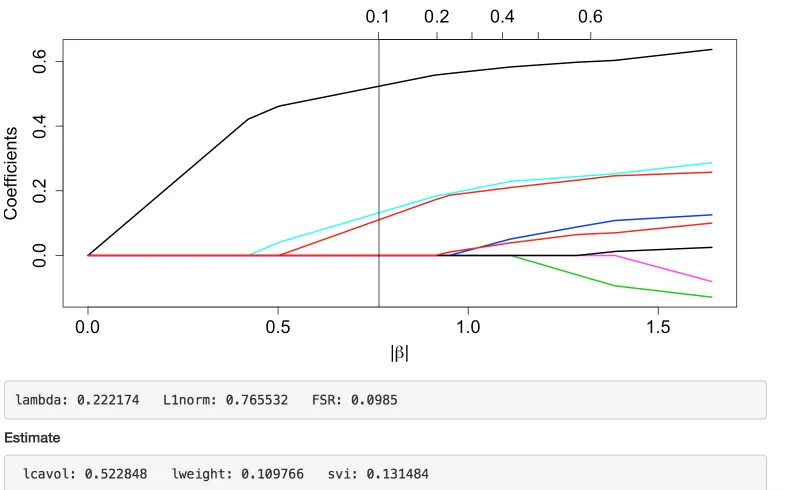
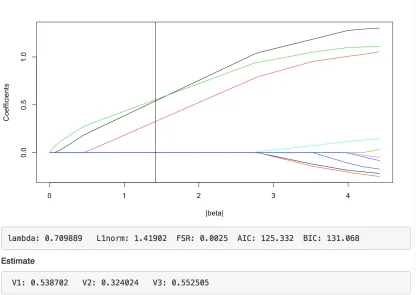
Figure 2.1 Lasso solution path for prostate cancer data. FSR and coefficient estimates are designed to be shown interactively. . . 32 Figure 2.2 Performances under different dimensions at α = 0.2. Left and right figure
shows the average FSR and TSR respectively. The Knockff and Knockoff methods requiren > p and the Wu’s pseudo-variable method requiresn >2p. 40 Figure 2.3 Performances under different correlations at α = 0.2. Left and right figure
shows the average FSR and TSR respectively. . . 40 Figure 2.4 Performances under different coefficient amplitude atα= 0.2. Left and right
figure shows the average FSR and TSR respectively. . . 41 Figure 2.5 Performances under different number of nonzero coefficients at α= 0.2. Left
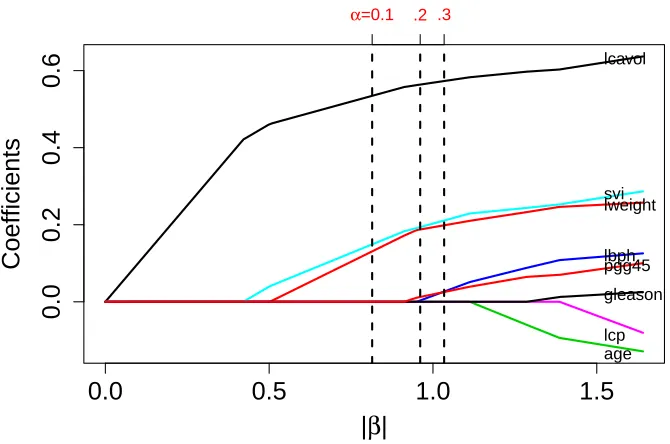
and right figure shows the average FSR and TSR respectively. . . 41 Figure 2.6 Lasso solution path for prostate cancer data. Vertical lines from left to right
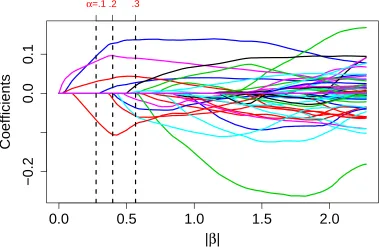
correspond to estimated FSRs ofα= 0.1, α= 0.2, andα= 0.3. . . 42 Figure 2.7 Lasso solution path for leukemia cancer gene expression data. Vertical lines
from left to right correspond to estimated FSRs of α = 0.1, α = 0.2, and α= 0.3. . . 44 Figure 3.1 Interactive plot of solution path; It shows model information including FSR,
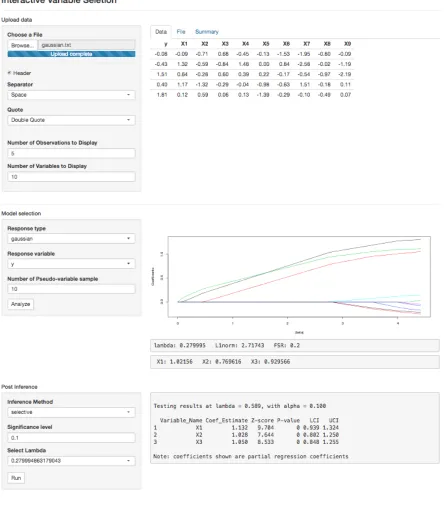
AIC, BIC, and coefficient estimates. . . 55 Figure 3.2 Screen-shot for Shiny Web Application; This application allows users to
up-load dataset, run penalized models, explore solution path interactively and do inference after model selection. . . 58
Figure B.2 Penalized regression; Performances under different correlations atα= 0.1. . . 69 Figure B.3 Penalized regression; Performances under different coefficient amplitude at
α= 0.1. . . 70 Figure B.4 Penalized regression; Performances under different number of nonzero
coef-ficients atα= 0.1. . . 70 Figure B.5 Penalized regression; Performances under different dimensions at α= 0.3. . . 71 Figure B.6 Penalized regression; Performances under different correlations atα= 0.3. . . 71 Figure B.7 Penalized regression; Performances under different coefficient amplitude at
α= 0.3. . . 72 Figure B.8 Penalized regression; Performances under different number of nonzero
coef-ficients atα= 0.3. . . 72 Figure B.9 Results without permutation added; Performances under different dimensions
atα= 0.2 . . . 73 Figure B.10 Results without permutation added; Performances under different
correla-tions atα= 0.2 . . . 73 Figure B.11 Results without permutation added; Performances under different coefficient
amplitude atα= 0.2 . . . 74 Figure B.12 Results without permutation added; Performances under different number of
nonzero coefficients at α= 0.2 . . . 74 Figure B.13 Logistic model; Performances under different dimensions atα= 0.2. Knockff
and Knockoff+ method only work if n >2p. . . 76 Figure B.14 Logistic model; Performances under different correlations atα= 0.2. . . 76 Figure B.15 Logistic model; Performances under different coefficient amplitude atα= 0.2. 77 Figure B.16 Logistic model; Performances under different number of nonzero coefficients
atα= 0.2. . . 77 Figure B.17 Cox model; Performances under different dimensions atα= 0.2. Knockff and
Knockoff+ method only work if n >2p. . . 79 Figure B.18 Cox model; Performances under different correlations atα = 0.2. . . 79 Figure B.19 Cox model; Performances under different coefficient amplitude at α= 0.2. . . 80 Figure B.20 Cox model; Performances under different number of nonzero coefficients at
Chapter 1
Assessing Tuning Parameter
Selection Variability in Penalized
Regression
1.1
Introduction
Penalized estimation is a popular means of regression model fitting that is quickly becoming
a standard tool among quantitative researchers working across nearly all areas of science.
Ex-amples include the Lasso (Tibshirani, 1996), SCAD (Fan and Li, 2001), Elastic Net (Zou and
Hastie, 2005), and the adaptive Lasso (Zou, 2006). One appealing feature of these methods
is that they perform simultaneous model selection and estimation, thereby automating
model-building at least partially. This is especially beneficial in settings where the number of predictors
is large, precluding manual inspection of all possible models. However, a consequence is that
the analyst becomes increasingly dependent on an estimation algorithm that has neither the
subject-matter knowledge nor the intuition that might guide a less automated and more
inter-active model-building process (Henderson and Velleman, 1981; Cox, 2001). A hybrid approach
occurring on a solution path, and then to apply interactive model-building techniques to choose
a model from among these. We develop and advocate such a hybrid approach wherein a set
of candidate models are identified using the solution path, and then models along this path
are prioritized using their conditional probability of selection according to one or more tuning
parameter selection methods. We envision this approach as being useful in at least two ways: (i)
it facilitates interactive, expert-knowledge driven exploration of high-quality candidate models
even when the initial pool of models is large; and (ii) it provides valid conditional prediction
sets for a data-driven tuning parameter given the observed design matrix and solution path,
that is applicable for a large class of tuning parameter selection methods.
There is a vast literature on tuning parameter selection methods. Classical methods include
Mallow’s Cp (Mallows, 1973), AIC (Akaike, 1974), BIC (Schwarz, 1978), cross-validation, and generalized cross-validation (Golub et al., 1979). More recent work on tuning parameter
selec-tion, driven by interest in high-dimensional data, includes new information-theoretic selection
methods (Chen and Chen, 2008; Wang et al., 2009; Zhang et al., 2010; Wang and Zhu, 2011;
Kim et al., 2012; Fan and Tang, 2013; Hui et al., 2015) as well as resampling-based approaches
(Hall et al., 2009; Meinshausen and B¨uhlmann, 2010; Feng and Yu, 2013; Sun et al., 2013;
Shah and Samworth, 2013). The foregoing methods select a single tuning parameter and hence
a single fitted model. Our goal is to quantify the stability of these methods by constructing
conditional prediction sets for data-driven tuning parameters and to use these prediction sets
to prioritize models for further, expert-guided exploration. Given one or more tuning parameter
selection methods, we identify all models with sufficiently large conditional probability of being
selected given the design matrix and observed solution path.
In Section 1.2, we review penalized linear regression. In Section 1.3, we derive exact and
asymptotic estimators of the sampling distribution of a data-driven tuning parameter. We
examine the performance of the proposed methods through simulation studies in Section 1.4.
In Section 1.5, we illustrate the proposed methods using two data examples. A concluding
1.2
Penalized linear regression
We assume that the data are generated according to the linear model Yi = X|iβ0 +i, for
i = 1, . . . , n, where 1, . . . , n are independent, identically distributed errors with expectation zero, β0 = (β01, . . . , β0p)|, and X1, . . . ,Xn are predictors that can be regarded as either fixed or random. Let Y = (Y1, Y2, . . . , Yn)| be the vector of responses and X = (X1,X2, . . . ,Xn)| the design matrix with the first column equal to1n×1. LetPndenote the empirical distribution.
We consider penalized least squares estimators
b
β(λ) = argmin
β∈Rp
1
2||Y−Xβ||
2+λ p
X
j=2
fj(βj;Pn)
,
where fj(·), j = 2, . . . , p are penalty functions. For example, fj(βj;Pn) = |βj| corresponds to the Lasso, and fj(βj;Pn) =|βj||βbols,j|−γ corresponds to the adaptive Lasso, where βbols,j is the ordinary least squares estimator and γ >0 is a constant.
For any Λ ⊆ [0,∞) define the solution path along Λ as Sb(Λ) ={bβ(λ) :λ ∈Λ}; we write b
S to denote Sb{[0,∞)}. While the solution path along Λ may contain a continuum of coeffi-cient vectors, it is commonly viewed as containing a finite set of unique models corresponding
to each unique combination of non-zero elements of coefficients in Sb(Λ), i.e., the set of mod-els MnSb(Λ)
o
= M∈
0,1 p : M = 1bβ(λ)6=0, for someλ ∈ Λ . The number of models in MnSb
o
is typically much smaller, e.g.,Op{min(n, p)}, than the set of all of 2p possible models. Thus, the set of models along the solution path are a natural and computationally manageable
subset of models for further investigation. Standard practice is to chose a single value of the
tuning parameter, saybλ, that optimizes some pre-specified criterion and subsequently a single model MhSb
n b
λoi. However, the selected tuning parameter is a random variable and there may be multiple models along the solution path where the support of the selected tuning
pa-rameter is large; e.g.,MnSb(Lτ) o
expert judgment and other factors not captured in the estimation algorithm. Also, unlikely
models can be ruled out. To formalize this procedure, we consider selection methods within the
framework of generalized information criterion.
Define the generalized information criterion as
GICλ = log(σb
2
λ) +wndfbλ, (1.1)
whereσb
2 λ =n
−1Pn
i=1
n
Yi−Xi|βb(λ) o2
,dfbλ = Pp
j=11|βbj(λ)|>0, andwnis a sequence of positive
constants, with wn = log(n)/n and wn= 2/nyielding BIC and AIC respectively. We consider data-driven tuning parameters of the formbλGIC= argminλ
n log(σb2
λ) +wndfbλ o
. We focus on the
setting wheren > pas the GIC is not well-defined ifp≥n. However, we provide an illustrative example in Section 5 wherep > nwherein our method is applied after an initial screening step; this two-stage procedure is in line with our vision for using automated methods to identify a
small set of candidate models for further consideration.
1.3
Estimating the conditional distribution of
λGIC
ˆ
In this section, we characterize and derive estimators of the conditional distribution of bλGIC given Sb and X. We first show that conditioning on Sb and X is equivalent to conditioning on
X|Y andX. We then show that ˆλGIC is a non-decreasing function of the sum of squares error
of the full modelσb20 =n−1Pn
i=1(Yi−X |
iβbols)2. Therefore, the conditional distribution ofbλGIC is completely determined by the conditional distribution of bσ20.
1.3.1 Conditioning on the solution path
We assume that fj(βj,Pn), j = 2, . . . , p depends on the observed data only through X|Y and X|X; this assumption is natural as X|X and X|Y are sufficient statistics for the
condi-tional mean of Y given X under the assumed linear model. Under this assumption, βb(λ) = argmin
n
1β|X|Xβ−Y|Xβ+λPp
f (β ; ) o
solu-tion path is completely determined by X|X and X|Y. On the other hand, givenSband X, we can recoverX|Y usingX|Xβb(0) =X|X
(X|X)−1X|Y =X|Y. Therefore, conditioning on
solution path and design matrix is equivalent to conditioning onX|Y andX(see Lemma 1.7.1
in the Appendix).
In the case of adaptive Lasso, we assume that X is of full column rank so that fj(βj;Pn), which depends on βbols,j, is well-defined. It can be seen that if X is full column rank then the entire solution path is determined by X|X and βb
ols. Conditioning on the solution path is also
practically relevant because it is consistent with the common practice wherein an analyst is
presented with a full solution path and then proceeds to identify a model as a point along this
path.
1.3.2 Exact distribution of λˆGIC |(S,b X)
We assume that the models along the solution path are determined by the sequence of tuning
parameters ˆλ(1) <λˆ(2)<· · ·<ˆλ(mb), so thatmb is the total number of tuning parameters. The
following lemma characterizes the conditional distribution ofλbGIC.
Lemma 1.3.1 The selected tuning parameter, bλGIC, is completely determined by (S,b X,bσ02).
Furthermore, assume||Y−X ˆβ(λ)||2is a non-decreasing function ofλ, write
b
λGIC=λ(S,b X,bσ02),
then for each fixed Sb=sand X=x, the map σ2 7→λ(s,x, σ2) is non-decreasing.
Remark If the error is normally distributed, then (nbσ02)/σ20is independent of (S,b X) and follows a chi-square distribution with n−p degrees of freedom. Therefore, the preceding lemma shows that, under normal errors, the conditional distribution of ˆλGICgiven (S,b X) is a non-decreasing transformation of a chi-square random variable.
Define Dbλ = {βbols−βb(λ)}|X|X{βbols−βb(λ)}. For k = 1, . . . ,m,b define Abk = {i : dfbˆλ
(i) <
b dfˆλ
(k)},Bbk={i:dfbλˆ(i) >dfbλˆ(k)},Cbk={i:i6=k, and dfbλˆ(i) =dfbλˆ(k)}, and
b `i,k =
b Dλˆ
(k)exp
wn dfbλˆ
(k) −dfbλˆ(i) −Dbˆλ(i)
1−expwn dfbˆ
λ(k)−dfbλˆ(i)
wherewn is from Eq. (1.1). The quantities in the foregoing definitions are all measurable with respectX and Sband thus, for probability statements conditional X and Sb, they are regarded as constants.
The following proposition gives the exact conditional distribution of bλGIC given Sband X.
Proposition 1.3.2 Define Ibk = 1
b Dˆλ
(k) <Dbˆλ(i), for all i∈Cbk
with the convention that
b
Ik= 1 if Cbk is empty, and pk=P maxi∈
b
Bkb`i,k ≤nbσ
2
0 ≤mini∈Abk`bi,k
bS,X
. Then,
PbλGIC=λb(k) bS,X
= min(pk,Ibk).
Provided that the conditional distribution ofbσ02given (S,b X) is known or can be consistently esti-mated, the preceding proposition can be used to construct conditional prediction sets forλbGIC. A (1−α)×100% conditional prediction set is{λˆ(i):i∈Γ}, where
P
i∈ΓP
ˆ
λGIC= ˆλ(i)|S,b X
≥
1−α. Alternatively, as discussed previously, one can construct the τ upper level set Lτ =
n ˆ
λ(i):PλˆGIC= ˆλ(i)|S,b X
> τo, for anyτ ∈(0,1).
Define ˆak= mini∈Abk`bi,k and ˆbk= maxi∈Bbk`bi,k. If the errors are normally distributed then
pk =Fχ2n−p
ˆ ak
σ02
−Fχ2
n−p
ˆ bk
σ20 !
, for ˆak≥ˆbk. (1.2)
Pluggingσb20 into this expression yields an estimator ˆpk forpk. Define gk(t) = Fχ2
n−p(ˆak/t)−Fχ2n−p
ˆ bk/t
.Then a (1−α)×100% projection confidence interval (Berger and Boos, 1994) forpk (Eq. 1.2) is
inf
t∈Cgk(t), supt∈C gk(t)
, (1.3)
Thus, an estimator ofLτ is
ˆ Lτ =
ˆ
λ(k): sup t∈C
gk(t)> τ
. (1.4)
Remark The assumption that Xis full rank is not necessary for Proposition 1.3.2. Note that
the conclusions depend only on the quantitiesXβbols,Xβb(λ) and ˆσ02, which are computable even when Xis not full rank.
1.3.3 Limiting conditional distribution of bσ2 0
As discussed above, if the errors are assumed to be normally distributed then exact distribution
theory for bλGIC is possible using a transformed chi-square random variable. Here, we consider asymptotic approximations that apply more generally.
Denote the third and fourth moment of asµ3, and µ4, respectively. Define
Σ =
σ20C−1 µxµ3,
µ|xµ3, µ4,−σ04
,
where C = limn→∞n−1Pni=1XiX|i. And write Φp+1(t) to denote the cumulative distribution
function of a standard (p+ 1)-dimensional multivariate normal distribution evaluated att. For
u,v∈Rp+1 writeu≤vto mean component-wise inequality. The following are standard results
from ordinary linear regression under common regularity conditions summarized in Section 1.7
in the Appendix (see the proof of Proposition 1.3.3).
Proposition 1.3.3 The asymptotic joint distribution ofβbols−β0 and bσ20−σ02 is multivariate
normal with mean zero and covariance Σ, i.e.,
sup t∈Rp+1
P
√ nΣ−1/2
b
βols−β0
b σ02−σ02
≤t
−Φp+1(t)
→0.
condition-ing on (βbols,X) (in the sense that they generate the sameσ-algebra). Therefore to approximate the conditional distribution ofbσ02given (S,b X), we construct an estimator of Σ, sayΣ, and thenb use the above proposition to form a plug-in estimator of the distribution of bσ02 given (βbols,X). Define
ˆ
ei =Yi−X|iβbols, i= 1,2, . . . , n, (1.5)
and subsequentlyσb20 =n−1Pn
i=1eˆ2i,µb3,=n
−1Pn
i=1eˆ3i,µb4,=n
−1Pn
i=1ˆe4i, ˆµx=n−1Pni=1Xi, and Cb=n−1
Pn
i=1XiX|i. The estimated conditional distribution of bσ
2 0 is
N "
b σ02,1
n (
(µb4,−σb
4 0)−
ˆ µ23,
ˆ σ2
0
ˆ µ|xCbµˆx
)#
. (1.6)
This approximation, coupled with Proposition 1.3.2, can be used to approximate the conditional
distribution of bλGIC when a chi-squared approximation is not feasible.
Henceforth, we assume that the errors are symmetric about zero, in which case the third
moment of i,µ3,, is zero, which implies ˆσ02 is asymptotically independent of ˆβols. Therefore,
pk=P ˆbk≤nσb
2 0 ≤aˆk
bS,X
= Φ √
n(ˆak/n−σ02)
p
µ4,−σ40
! −Φ
√
n(ˆbk/n−σ02)
p
µ4,−σ04
!
+op(1), for ˆak≥ˆbk,
(1.7)
whereµ4,is the fourth moment ofi. Define
hk(t1, t2) = Φ
√
n(ˆak√/n−t1)
t2
−Φ
√
n(ˆbk√/n−t1)
t2
! .
Suppose that Ey is a (1−α)×100% asymptotic confidence region forµ4,−σ40 and σ02, then
" inf
(t1,t2)∈Ey
hk(t1, t2), sup (t1,t2)∈Ey
hk(t1, t2)
#
, (1.8)
We construct the confidence set Ey using Wald confidence region:
Ey =
(t1, t2) :
t1−σˆ02
t2−µˆ4,+ ˆσ04
|
ˆ V−1
t1−σˆ20
t2−µˆ4,+ ˆσ04
≤χ
2 1−α,2
,
where ˆV is the estimated covariance matrix of (ˆσ02, µˆ4,−ˆσ04)|. Then the optimization problem
in Eq. (1.8) is solved using an augmented Lagrangian method (Bertsekas, 2014). An estimator
of Lτ is
ˆ Lτ =
( ˆ
λ(k): sup (t1,t2)∈Ey
hk(t1, t2)> τ
)
. (1.9)
1.3.4 Bootstrap approximation to the distribution of ˆλGIC|(S,b X)
In small samples, it may be preferable to estimate the conditional distribution of bσ2
0 using the
bootstrap. Let γ(b) = (γ1(b), . . . , γn(b))| be a sample drawn with replacement from {eˆ1, . . . ,eˆn}. Define Y(b) =Xβbols+ (I−Px)γ(b),wherePx=X(X|X)−X|. This bootstrap method differs from the usual residual bootstrap in ordinary linear regression because our goal is to
esti-mate the conditional distribution of ˆσ02. We accomplish this by multiplying the error vector by (I−Px), which ensures that βb
(b)
ols = (X|X)−1X|Y(b) = βbols so that Y(b) produces the same solution path as the original sampleY. The conditional distribution of the tuning parameter is
estimated by generatingb= 1, . . . , Bbootstrap samples and calculating the corresponding tun-ing parameter for each bootstrap sample. See Proposition 1.7.8 in Section 1.7 of the Appendix
for a statement of the asymptotic equivalence between the proposed bootstrap method an the
normal approximation given in Eq. (1.6).
1.4
Simulation Studies
In this section, we investigate the finite-sample performance of the proposed methods using a
are generated from the modelYi =X|iβ0+i,wherei, i= 1, . . . , nare generated independently from a standard normal distribution and Xi, i = 1, . . . , n are generated independently from a multivariate normal distribution with mean zero and autoregressive covariance structure,
Cj,k =ρ|j−k|, withρ= 0 or 0.5 and 1≤j, k≤20, or 200. For the regression coefficientsβ0, we
consider the following four settings:
Model 1:β0=c1×(1,1,1,1,0,0,0,0,· · ·,0)|;
Model 2:β0=c2×(1,1,1,1,0,0,0,0,1,1,1,1,· · ·,0)|;
Model 3:β0=c3×(3,2,1,0,0,0,0,· · · ,0)|;
Model 4:β0=c4×(3,2,1,0,0,0,0,0,3,2,1,0,· · ·,0)|;
wherec1, . . . , c4 are constants chosen so that the population R2 of each model is 0.5 under the
definitionR2 = 1−Var(Y|X)/Var(Y).For each combination of parameter settings, 10,000 data sets were generated; the bootstrap estimator was constructed using 5,000 bootstrap replications.
For estimating the τ upper level set,Lτ =
n λ : P
b
λGIC=λ
bS,X
> τ
o
, we consider
1. (AsympNor) the plug-in estimator based on the normal approximation to the distribution
of pk;
2. (Bootstrap) the estimator based on the bootstrap approximation to the sampling
distri-bution ofpk as described in Section 3.4;
3. (UP1) the estimator based on a 90% projection confidence set as in Eq. (1.4);
4. (UP2) the estimator based on a 90% projection confidence set as in Eq. (1.9);
5. (Akaike) the estimator based on Akaike weights: ˆLτ =
λi :
exp(−0.5nGICλi)
Pmˆ
i=1exp(−0.5nGICλi)
> τ
,
withwn= 2/n (Burnham and Anderson, 2003);
6. (ApproxPost) the estimator based on approximate posterior distribution: ˆLτ =
λi :
exp(−0.5nGICλi)
Pmˆ
i=1exp(−0.5nGICλi) > τ
We define the performance of these estimators in terms of their true and false discovery rates.
Provided that Lτ is non-empty, define the true discovery rate of an estimator Lbτ as
TDR(Lbτ) =E
#nLbτ∩ Lτ o #Lτ
,
where # denotes the number of elements in a set. Provided Lbτ is non-empty with probability one, define the false discovery rate of an estimator Lbτ as
FDR(Lbτ) = 1−E
#nLbτ∩ Lτ o
#Lbτ .
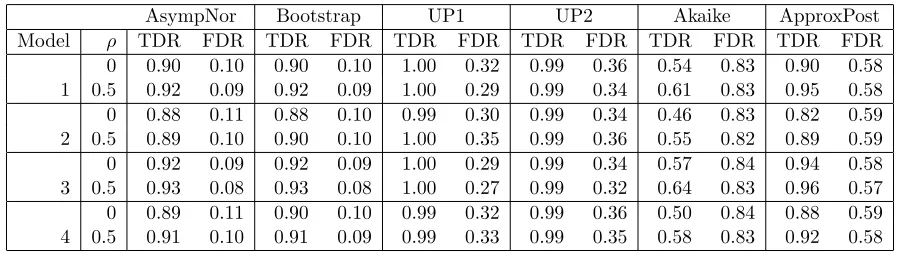
Here, we present results for τ = 0.05; results for τ = 0.1 and τ = 0.2 are presented in the Supplemental Materials. The results for p = 20, n = 50 and p = 100, n = 200 are presented in Table 1.1 and 1.2 respectively. AsympNor and the bootstrap perform similarly with a TDR
above 0.9 and an FDR below 0.10. As expected, methods based on upper bound of confidence
interval achieve higher TDR but at the price of higher FDR. Methods based on Akaike weights
and approximate posterior have the worst performances in terms of discovery rate ofLτ. The
poor performance is not surprising as these methods were not designed for conditional inference.
Table 1.1: Discovery rate forp= 20, n= 50
AsympNor Bootstrap UP1 UP2 Akaike ApproxPost
Model ρ TDR FDR TDR FDR TDR FDR TDR FDR TDR FDR TDR FDR
0 0.90 0.10 0.90 0.10 1.00 0.32 0.99 0.36 0.54 0.83 0.90 0.58
1 0.5 0.92 0.09 0.92 0.09 1.00 0.29 0.99 0.34 0.61 0.83 0.95 0.58
0 0.88 0.11 0.88 0.10 0.99 0.30 0.99 0.34 0.46 0.83 0.82 0.59
2 0.5 0.89 0.10 0.90 0.10 1.00 0.35 0.99 0.36 0.55 0.82 0.89 0.59
0 0.92 0.09 0.92 0.09 1.00 0.29 0.99 0.34 0.57 0.84 0.94 0.58
3 0.5 0.93 0.08 0.93 0.08 1.00 0.27 0.99 0.32 0.64 0.83 0.96 0.57
0 0.89 0.11 0.90 0.10 0.99 0.32 0.99 0.36 0.50 0.84 0.88 0.59
4 0.5 0.91 0.10 0.91 0.09 0.99 0.33 0.99 0.35 0.58 0.83 0.92 0.58
Table 1.2: Discovery rate for p= 100, n= 200
AsympNor Bootstrap UP1 UP2 Akaike ApproxPost
Model ρ TDR FDR TDR FDR TDR FDR TDR FDR TDR FDR TDR FDR
0 0.97 0.03 0.97 0.03 1.00 0.12 1.00 0.13 0.11 0.98 1.00 0.58
1 0.5 0.98 0.03 0.98 0.02 1.00 0.09 1.00 0.10 0.24 0.95 1.00 0.56
0 0.95 0.04 0.95 0.04 1.00 0.17 1.00 0.18 0.05 0.99 0.98 0.59
2 0.5 0.96 0.03 0.96 0.03 1.00 0.14 1.00 0.15 0.12 0.97 0.99 0.58
0 0.97 0.03 0.97 0.03 1.00 0.12 1.00 0.13 0.16 0.97 1.00 0.57
3 0.5 0.98 0.02 0.98 0.02 1.00 0.09 1.00 0.10 0.28 0.94 1.00 0.56
0 0.96 0.04 0.96 0.04 1.00 0.14 1.00 0.16 0.07 0.98 0.99 0.59
4 0.5 0.97 0.03 0.97 0.03 1.00 0.12 1.00 0.13 0.16 0.97 1.00 0.57
normality assumption as well as the asymptotic approximation. In calculating the coverage
probabilities, we restricted calculations to the set {λ : 0.9999> P(ˆλGIC =λ|S,ˆ X)>0.0001}.
Nominal coverage is set at 0.90. The results are presented in Table 1.3. The confidence intervals based on normality (Eq. 1.3) achieves nominal coverage in all cases. The confidence intervals
based on an asymptotic approximation undercover slightly, though coverage approaches nominal
levels as nincreases.
Table 1.3: Coverage Probability. Results are based on 10,000 replicated data sets Approximate Normality
ρ 0 0.5 0 0.5
1.5
Illustrative data examples
In this section, we apply the proposed methods to two datasets. The first data set informs the
relationship of pollution and other factors related to urban-living, and to age-adjusted
mortal-ity (McDonald and Schwing, 1973; Luo et al., 2006); and the second regards the relationship
between gene mutations and drug resistance level (Rhee et al., 2006). We demonstrate that
reporting a single model may not be appropriate in these two examples and that the proposed
methods have the potential to identify interesting models warranting further examination. As
in the simulation experiments, we consider the Lasso estimator tuned using BIC.
1.5.1 Pollution and mortality
As our first illustrative example we consider data on mortality rates recorded in 60 metropolitan
areas. Prior analyses of these data focused on the regression of age-adjusted mortality on 15
predictors that are grouped into three broad categories: weather, socioeconomic factors, and
pollution. A copy of the data set and a detailed description of each predictor are provided in
the Supplemental Materials.
Ignoring uncertainty in the tuning parameter selection, the LASSO estimator tuned
us-ing BIC leads to a model with six variables, Percent Non-White, Education, SO2 Pollution
Potential, Precipitation, Mean January Temperature, and Population Per Mile. However, the
estimated conditional sampling distribution of the tuning parameter indicates that a larger
model with eight predictors is approximately equally probable. Figure 1.1 displays the solution
path with the estimated selection probabilities using both the asymptotic normal and bootstrap
approximations. The estimated conditional distribution of the tuning parameter is displayed
in Table 1.4; 90% confidence intervals based on Eq. (1.3) and (1.8) are presented. The LASSO
coefficient estimates are presented in Table A.5 of the Appendix.
We further investigate the model with eight predictors. The eighth predictor added to the
model isMean July Temperature. Fitting a simple linear regression of mortality on Mean July
mortality on Mean January Temperature. This is in line with Katsouyanni et al. (1993) which
concluded that high temperatures are related to the mortality rate. It can be seen that in this
case, reporting a single model may not be appropriate. Rather, it may be more informative to
report the two models which contain essentially all of the mass of the conditional distribution
of the tuning parameter.
For comparison, results from forward stepwise regression are presented in Figure 1.2. The
smallest BIC value corresponds to Step 5 of the procedure which corresponds to a model with
the five predictors:Percent Non-White, Education, Mean January Temperature, SO2 Pollution
Potential, and Precipitation. This model is smaller than the model selected by LASSO tuned
using BIC. This may be because forward stepwise regression is greedy in that at each step it
seeks a variable that captures maximum variation in the residuals. Thus, if a candidate variable
is correlated with those selected in previous steps, it may be difficult to see the improvement
in the fitted model. In such cases, it might be preferable to use the solution path to generate a
candidate set of models.
Table 1.4: Estimated conditional distribution of the tuning parameter for the mortality rates data. Both the asymptotic normal approximation and the bootstrap had only two support points, {124.21,288.20}.
λ 288.20 124.21
Model size 6 8
Probability mass normal 0.51 0.49
Probability mass bootstrap 0.48 0.52
90% CI based on normality (0.052, 0.950) (0.048, 0.948) 90% Approximate CI (0.009, 0.848) (0.154, 1.000)
1.5.2 ATV drug resistance
Our second example considers mutations that affect resistance to Atazanavir (ATV), a protease
0 50 100 150 200 250
−60
−20
0
20
40
60
Coefficients
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
P
ercentage
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
P
ercentage
Bootstrap AsyNorm
●
●
●●
● ●
● ●
● ●
●
● ● ● ●
●
● ●
0 50 100 150 200 250
7.6
7.8
8.0
8.2
|β|
BIC
0 5 10 15
−60
−20
0
20
40
60
Coefficients
●
●
●
● ●
● ● ●
● ●
● ●
● ●
● ●
0 5 10 15
7.4
7.6
7.8
8.0
8.2
Step
BIC
contains 328 observations and 361 predictors of gene mutations. The response is a measure of
drug resistance for ATV. Becausep > nin this example, we use 100 observations for screening 50 important predictors, ranked by Pearson correlation with response. We then fit a linear model
using the Lasso applied to the remaining 228 observations with the 50 important predictors
selected at screening.
The estimated conditional distribution of the tuning parameter and 90% confidence intervals
are presented in Table 1.5; the estimated distribution is overlaid on the solution path in Figure
1.3. It can be seen that the estimated distribution of the tuning parameter mainly favors two
models.
Similar to Barber et al. (2015), we evaluate candidate models based on treatment selected
mutations (TSM) panels, which provide a surrogate for the true important mutations. The
model minimizing BIC contains fifteen variables, while two of them correspond to the same
mutation. This leads to fourteen unique mutation locations, and four locations are potential
false discoveries (as assessed by TSM); see Table 1.5. Therefore, the surrogate-based estimated
false discovery rate is 4/14≈0.29. For tuning parameterλ= 1101.71, eleven unique positions are identified, and two locations are potential false discoveries. Tuning parameterλ= 1347.92 leads to nine unique locations with one potential false discovery. The corresponding
surrogate-based estimated false discovery rate is 1/9≈0.11, a decrease of twenty percent compared with the model minimizing BIC. Thus, in this case it might not be appropriate to report the single
model selected by BIC.
Table 1.5: Estimated conditional distribution of the tuning parameter for ATV drug resistance data.
λ 1347.92 1101.71 805.53
Model size 10 12 15
Probability mass normal 0.443 0.045 0.472
Probability mass bootstrap 0.494 0.047 0.454
0 200 400 600 800 1000
−50
0
50
100
150
Coefficients
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
P
ercentage
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0
P
ercentage
Bootstrap AsyNorm
●●●
●●
●●
●
●
● ●
●●● ●●●
● ●●
●● ●
●● ●
● ●●
●●
●●
●●
●●
●
● ●
0 200 400 600 800 1000
7.3
7.5
7.7
7.9
|β|
BIC
1.6
Conclusion
We proposed two simple procedures for estimating the conditional distribution of a data-driven
tuning parameter in penalized regression given the observed solution path and design matrix.
Our objective is to quantify the stability of the selected model and thereby identify a set of
potential models for consideration by domain experts. A plot of the solution path with the
estimated selection probabilities or upper confidence bounds overlaid, e.g., Figures 1.1 and 1.3,
is one means of easily conveying uncertainty in the tuning parameter and identifying models
that warrant additional investigation. It is noteworthy that in both examples the identified sets
of likely models are not contiguous in size. Thus our methods provide a theoretically motivated,
confidence-set-based alternative to the practice of considering models near in size to the
1.7
Proof and Technical Details
Lemma 1.7.1 If the penalty function fj(βj;Pn) depends on the data only through X|Y and X, then the distribution of λˆGIC conditional on Sb and X is equal to the distribution of λˆGIC
conditional onX|Y andX.
Proof βb(λ) = argminβ n
1
2β|X|Xβ−Y|Xβ+λ
Pp
j=2fj(βj;Pn)
o
, from which it can be seen
that the solution path is completely determined by X|X and X|Y. On the other hand, given
b
S and X, we can recover X|Y using X|Xβb(0) =X|X
(X|X)−1X|Y =X|Y.
Lemma 1.7.2 Suppose that b(·) and c(·) are non-negative valued functions defined on [0,∞]
such that b(λ) is a non-decreasing forλ≥0 withb(0) = 0. For x≥0, define
H(x, λ) = log{x+b(λ)}+c(λ)
and
λ(x) = argmin λ
H(x, λ).
Then λ(x) is non-decreasing in x≥0.
Proof of Lemma 1.7.2 Supposedx1 ≤x2, we need to show thatλ(x1)≤λ(x2). First, consider
the difference ofH(x2, λ) andH(x1, λ)
H(x2, λ)−H(x1, λ) = log{x2+b(λ)} −log{x1+b(λ)}
= log
1 + x2−x1 x1+b(λ)
,
it follows that
λ(x2) = argmin λ
H(x2, λ),
= argmin λ
H(x1, λ) + log
1 + x2−x1 x1+b(λ)
≥λ(x1).
The last inequality follows from that log{1 + (x2−x1)/(x1+b(λ))} is negative and
non-increasing with respect to λ.
Proof of Lemma 1.3.1 Recall that the information criterion can also be expressed as
GICλ= log
||Y−Xβb(λ)||2 n
!
+wndfbλ
= log ||Y−Xβbols+Xβbols−Xβb(λ)||
2
n
!
+wndfbλ
= log
ˆ
σ20+Dλ n
+wndfbλ,
whereDλ ={bβols−βb(λ)}|X|X{bβols−βb(λ)}.
Because Dλ is a deterministic function of λ conditional on the solution path and design matrix, the only variability inbλGIC is due to ˆσ02. Therefore,bλGIC|(βbols,X) is a function of ˆσ20. Then monotonicity comes immediately by observing that Dλ is a non-decreasing function
forλ≥0 with D(0) = 0 and invoking Lemma 1.7.2.
Lemma 1.7.3 Let Sband X be fixed. If dfbˆ
λ(k) <dfbλˆ(i), then GICλˆ(i) ≤GICλˆ(k) iff nσb
2
0 ≤b`i,k;
and if dfbλˆ
(k) >dfbλˆ(i), then GICλˆ(i) ≤GICˆλ(k) iff nbσ
Proof of Lemma 1.7.3 Consider the casedfbˆ
λ(k) <
b dfˆλ
(i),
P(GICˆλ(i) ≤GICˆλ(k) |S,ˆ X)
=P "
log (
ˆ σ20+
Dˆλ
(i)
n )
+wndfbλˆ
(i) ≤log
( ˆ σ20+
Dˆλ
(k)
n )
+wndfbλˆ
(k) |
ˆ S,X # =P " log ( ˆ σ20+
Dˆλ
(i)
n )
−log (
ˆ σ20+
Dˆλ
(k)
n )
≤wn
n b dfλˆ
(k) −dfbˆλ(i)
o |S,ˆ X
#
=P "nσˆ2
0 +Dˆλ
(i)
nσˆ02+Dˆλ(k)
≤exp{wn(dfbλˆ
(k)−dfbλˆ(i))} |
ˆ S,X
#
=P nσˆ02≤
Dλˆ
(k)exp{wn(
b dfˆλ
(k)−
b dfλˆ
(i))} −Dˆλ(i)
1−exp{wn(dfbλˆ
(k) −dfbˆλ(i))}
|S,ˆ X
.
The casedfbˆ
λ(k) >dfbˆλ(i) follows by a similar argument.
Proof of Proposition 1.3.2 The proof follows from the fact that
GICλˆ
(k) <GICλˆ(i) for all i∈Ak∪Bk if and only if maxi∈Bˆ
k
ˆ
`i,k ≤nσˆ20 ≤max i∈Aˆk
ˆ `i,k.
To prove Proposition 1.3.3, we assume:
(A1F): under a fixed design limn→∞n−1Pin=1XiX|i = C, limn→∞n−1Pni=1Xi = µx, where
C∈Rp×p is nonnegative definite and µx∈Rp;
(A1R): under a random design, with probability one, limn→∞n−1Pni=1XiX|i =C, and limn→∞n−1Pni=1Xi =µx,whereC ∈Rp×p is nonnegative definite andµx∈Rp;
(A2): E4i <∞.
Under assumptions (A1F) and (A2), we have the following well-known results, which facilitate
Lemma 1.7.4
b
βols−→as β0;
√
n(βbols−β0)
d
−
→N(0p×1, C−1).
Proof of Proposition 1.3.3 First consider the fixed design model. Let
ψ(Yi,Xi,β, σ2) =
(Yi−X|iβ)Xi (Yi−X|iβ)2−σ2
.
Then (βbols| , σb2)|is a solution to the equation
n
X
i=1
ψ(Yi,Xi,β, σ2) = 0.
A Taylor series expansion around the true value (β0, σ02) results in
n
X
i=1
ψ(Yi,Xi,βbols, b σ2) =
n
X
i=1
ψ(Yi,Xi, β0, σ20) + n
X
i=1
ψ0(Yi,Xi,β0, σ02)
b
βols−β0
b σ2−σ20
+Rn,
whereψ0 is the derivative of ψand
Rn= n X i=1
0p×1
(βbols−β0)|XiX|i(βbols−β0)
.
Rearranging it leads to
( −1 n n X i=1
ψ0(Yi,Xi,β0, σ02)
) √ n b
βols−β0
b σ2−σ20
= ( 1 √ n n X i=1
ψ(Yi,Xi,β0, σ20)
) +Rn/
Because −ψ0(Y
i,Xi,β0, σ02) =
XiX|i 0p×1
2X|i(Yi−X|iβ0) 1
, it follows that
−1 n
n
X
i=1
ψ0(Yi,Xi,β0, σ02) p − →
C 0p×1 01×p 1
by consistency ofβbols.
Then by the multivariate Lindberg-Feller CLT,
1 √ n n X i=1
ψ(Yi,Xi,β0, σ20) d − →N
0p×1
0 ,
σ02C µxµ3,
µ|xµ3, µ4,−σ04
.
Finally, Rn/
√
nisop(1) as of
1 √ n n X i=1
(βbols−β0)|XiX|i(βbols−β0) = √
n(βbols−β0)| ( 1 n n X i=1 XiX|i
)
(βbols−β0).
Therefore by Slutsky’s theorem,
√ n b
βols−β0
ˆ σ20−σ20
d − →N
0p×1
0 ,
σ02C−1 µxµ3,
µ|xµ3, µ4,−σ40
. (1.10)
Then, for the random design, because limn→∞n−1Pni=1XiX|i =C and limn→∞n−1Pni=1Xi =
µx almost surely, assumption A1F holds for almost every sequencex1,x2, . . .. Therefore
equa-tion 1.10 holds for almost every sequence x1,x2, . . ..
Proposition 1.7.5 Assume the distribution of i, i= 1, . . . , n are symmetric about zero, then for any >0,
P
inf
(t1,t2)∈Ey
|pk−hk(t1, t2)|>
≤α+o(1), (1.11)
Proof Denote the event that (σ20, µ4,−σ40)∈ Gy as A,
P inf
(t1,t2)∈Ey
|pk−hk(t1, t2)|>
≤P inf
(t1,t2)∈Ey
|pk−hk(t1, t2)|> |A
P(A) +P(Ac)
≤0(1−α) +α+o(1) =α+o(1).
Lemma 1.7.6 For anys≥1, assume n−1Pn
i=1||Xi||s=O(1), then
n−1
n
X
i=1
|eˆi|s as−→ms,
where ms=E|1|s. Proof of Lemma 1.7.6
n−1
n
X
i=1
|eˆi|s
!1/s
− n−1
n
X
i=1
|i|s
!1/s
s
≤n−1
n
X
i=1
|eˆi−i|s
=n−1
n X i=1 X |
i(βˆols−β0)
s
≤n−1
n
X
i=1
||Xi||s||βˆols−β0||s.
Butβˆols
as
−→β0andn−1Pni=1||Xi||s=O(1), so that n−1Pni=1|ˆei|s
1/s
− n−1Pn
i=1|i|s
1/s as −→
0. Then by Strong Law of Large Numbers,n−1Pn
i=1|i|s as−→E|1|s. And thusn
−1Pn
i=1|eˆi|s as−→
E|1|s.
Lemma 1.7.7 Assume (A1F) and (A2), then
1 √
nγ
(b)|P
xγ(b)
p
conditionally almost surely.
Proof of Lemma 1.7.7 Denote ˆβ∗ols = (X|X)−1X|(Xβˆols+γ(b)), then we have
1 √
nγ
(b)|P
xγ(b)= √
n( ˆβ∗ols−βˆols)|(1 nX
|X)( ˆβ∗
ols−βˆols).
Then by noting √n( ˆβ∗ols −βˆols) −→d N(0, C−1) conditionally almost surely (Theorem 2.2 of (Freedman, 1981)), √1
nγ (b)|P
xγ(b) isop(1) conditionally almost surely.
Proposition 1.7.8 Under the assumptions (A1F) and (A2), and further assuming thatE|i|4+δ <
∞andn−1Pn
i=1||Xi||4+δ<∞for anyδ >0, then
√
n(ˆσ∗2−σˆ02)→−d N(0, µ4,−σ40)conditionally
almost surely.
Proof of Proposition 1.7.8 Recall
ˆ σ∗2= 1
nγ
(b)|(I−P
x)γ(b)
= 1 nγ
(b)|γ(b)− 1
nγ
(b)|P
xγ(b).
Because n−1/2γ(b)|Pxγ(b)
p
−
→ 0 almost surely by Lemma 1.7.7, ˆσ∗2 has the same asymptotic
distribution as n−1γ(b)|γ(b). Then because the γ1(b), γ2(b), . . . , γn(b) are sampled from different distribution for every n, the Lindberg central limit theorem is used to obtain the asymptotic distribution. The conditional mean of (γi(b))2 is
E({r1(b)}2|Y) = 1 n
n
X
i=1
(ˆei)2= ˆσ02.
The conditional variance is
V ar({r(1b)}2|Y) = 1 n
n
X
i=1
(ˆei)4−
( 1 n
n
X
i=1
(ˆei)2
variance converges toµ4,−σ04 almost surely.
Then to verify the Lyapunov Condition,
1
n
V ar({r(1b)}2|Y)o2+δ n
X
i=1
En|(r(1b))2/√n|2+δ |Yo
= 1
n
V ar({r(1b)}2|Y)o2+δ
1 nδ/2E
n
|r1(b)|4+2δ|Y
o
= 1
n
V ar({r(1b)}2|Y)o2+δ
1 n1+δ/2
n
X
i=1
|ˆei|4+2δ,
which is o(1) almost surely by invoking Lemma 1.7.6. And thus√n(ˆσ2∗−σˆ02) d
−
→N(0, µ4,−σ04)
conditionally almost surely.
1.7.1 Theoretical results for high dimensions
Proposition 1.7.9 If p=o n1/2, then
√
n(σb20−σ20)→−d N(0, µ4,−σ40).
Proof of Proposition 1.7.9 We know bσ02 = n−1|+n−1|Px, where
√
n(n−1|−σ02) con-verges toN(0, µ4,−σ04) in distribution. It remains to prove n−1/2|Px
p
− →0.
By expectation of quadratic form, we have n−1/2E(|Px) = n−1/2tr(Px×I) ≤ n−1/2p =
o(1). Therefore, n−1/2|Px p
−
→0. This completes the proof.
Now we study the distribution of variance estimator after screening. First, we restate
The-orem 1 from (Fan and Lv, 2008) with slight modification. Denote A0 to be the true index of
nonzero regression coefficients, and S to be the screened subset. Assume Conditions 1-4 in (Fan
Theorem 1.7.10 (Accuracy of SIS) Under Conditions 1-4 in (Fan and Lv, 2008), if 2κ+ τ <1/2, there exists θ >1/2, we have
P(A0 ∈S) = 1−O exp −Cn1−2κ/logn
,
where C is a positive constant, and the size of S isO(n1−θ).
From above result, we have a screening approach to reduce number of predictors from huge
scale, O(exp(nc)), to a smaller scale, o(√n). Denote X =
X(1)|,X(2)|
|
, where X(1),X(2)
are corresponding to the first and second half of design matrix respectively. Similarly, define
Y(1),Y(2). Then the variance estimator is defined as
b
σ20 = 1/m n
Y(2)
o|
I−PX(2)
S
Y(2),
where m = n/2, and P
X(2)S is the projection matrix constructed from screened subset S and second half of design matrix, X(2).
Proposition 1.7.11 Under Conditions 1-4 in (Fan and Lv, 2008), if 2κ+τ <1/2, then
√ m(bσ
2 0−σ02)
d
−
→N(0, µ4,−σ04).
Proof of Proposition 1.7.11
√ mbσ
2 0 =1/
√ m
n
Y(2)
o|
I−PX(2)
S
Y(2)
=1/√mnX(2)β0+(2) o|
I−P X(2)S
n
X(2)β0+(2) o
=1/√m n
(2)
o|
(2)−1/√m n
(2)
o| PX(2)
S
(2)
+ 1/√mnX(2)β0 o|
I−P X(2)S
n
X(2)β0 o
+ 2/√mnX(2)β0 o|
I−P X(2)S
n
(2)o
For the first term, we know √m
1/m(2) |(2)−σ2
remains to prove the remaining term areop(1). For the second term, we know
E(1/√m n
(2)
o| PX(2)
S
(2)) = 1/√mE(PX(2)
S
) = 1/√m×o(√n).
Therefore it isop(1). For the third term,
1/√mE n
X(2)β0 o|
I −PX(2)
S
n
X(2)β0 o
=1/√mEnX(2)β0 o|
I −P X(2)S
n
X(2)β0 o
|A0 ∈S
P(A0 ∈S)+
1/√mE n
X(2)β0 o|
I −PX(2)
S
n
X(2)β0 o
|A0 6∈S
P(A0 6∈S)
=0 + 1/√mEnX(2)β0 o|
I−P X(2)S
n
X(2)β0 o
|A06∈S
P(A06∈S)
≤1/√mE n
X(2)β0 o|n
X(2)β0 o
P(A0 6∈S)
=√mβ0|Cβ0P(A0 6∈S)
≤√mV ar(Y)P(A06∈S)
=O √nexp −Cn1−2κ/logn
where the last inequality follows Condition 3,V ar(Y) =O(1). And thus it isop(1). For the last term,
V ar2/√mnX(2)β0 o|
I−P X(2)S
n
(2)o
= 4/mE n
X(2)β0 o|
I−PX(2)
S
n
X(2)β0 o
Chapter 2
Variable selection using
pseudo-variables
2.1
Introduction
Penalized regression is now a primary tool for model building across a wide range of
appli-cation domains. The operating characteristics of penalized regression estimators can depend
critically on tuning parameters which govern the amount of penalization. Accordingly, there
is an extensive literature on tuning parameter selection including information-based criteria
(Chen and Chen, 2008; Wang et al., 2009; Zhang et al., 2010; Fan and Tang, 2013; Hui et al.,
2015), resampling methods (Hall et al., 2009; Meinshausen and B¨uhlmann, 2010; Feng and
Yu, 2013; Sun et al., 2013; Shah and Samworth, 2013; Sabourin et al., 2015), and variable
addition methods (Wu et al., 2007; Barber et al., 2015; Barber and Cand`es, 2016). However,
these methods are typically used to facilitate black-box estimation wherein model selection and
fitting are completely automated, i.e., data-driven, so as to produce a single estimated model.
Complete automation is desirable in some contexts, e.g., benchmarking or online estimation
and prediction, and some level of automation in model-building is unavoidable except in very
building process; one way to do this is to characterize each candidate model along the solution
path of a penalized regression estimator in terms of its operating characteristics and then to
use these operating characteristics to choose among candidate models.
We derive an estimator of the false selection rate for each model along the solution path using
a novel variable addition method. The proposed estimator applies to both fixed and random
designs and allows forpn. The proposed estimator can be used to estimate a model with a pre-specified false selection rate or can be overlaid on the solution path to facilitate interactive
model exploration. Figure 2.1 shows an example of such a solution path using data from a
study on prostate cancer (Stamey et al., 1989); this figure is a screen capture from the software
provided in Chapter 3 that allows the analyst to mouse-over any point on the solution path
and examine the estimated coefficient values as well as the estimated false selection rate. In this
example, the selected point on the solution path corresponds to a model with three selected
variables, log cancer volume (lcavol); log weight (lweight); and seminal vesicale invasion (svi).
The estimated false selection rate corresponding to this model is 0.10 (additional details are
provided in Section 1.5.)
The proposed estimator of the false selection rate depends on the generation of
pseudo-variables that are conditionally independent of the response given the important pseudo-variables in
the model. As the true important variables are unknown in practice, our estimator consists
of three steps: (i) initial variable screening to estimate the set of important variables; (ii)
generation of pseudo-variables so that the covariance structure between the pseudo-variables
and those selected in the screening step mimics the covariance structure between the not-selected
and selected variables in the screening step; and (iii) fitting the penalized estimator and using
the proportion of selected pseudo-variables to construct an estimator of the false selection rate.
The proposed methodology is an example of a noise-variable or knock-off variable method. Such
methods have been applied to control the false selection rate in forward selection (Wu et al.,
2007) and for the Lasso (Barber et al., 2015; Barber and Cand`es, 2016). A primary contribution
λ(1), λ(2), . . . , λ(m)along the solution path that applies whenpn. When the proposed method
is used to tune the amount of penalization so as to achieve a target false selection rate, it provides
better empirical performance than alternatives in simulation experiments. Our theoretical and
methodological developments focus on a linear model estimated using the Lasso (Tibshirani,
1996) under a fixed design; however, simulation experiments illustrate broader applicability. To
facilitate the interactive model building, we have implemented the proposed methods in an R
package and a shiny web application both of which are described in the Chapter 3.
In Section 2.2, we establish notation, describe the proposed estimator, and state some of
its theoretical properties. In Section 2.3, we demonstrate the finite-sample performance of the
proposed method in a suite of simulation experiments. In Section 2.4, we illustrate application
of the proposed method using the data from prostate cancer study and leukemia cancer study.
Concluding remarks are made in Section 2.5.
2.2
Methods
2.2.1 Setup and notation
We consider data from a linear model under a fixed design. The observed data are{(Xi, Yi)}ni=1
and it is assumed thatYi =Xi|β0+i, where1, . . . , n iid
∼Normal(0, σ2), andβ0 = (β0,1, . . . , β0,p)|
∈Rp. Define
X= (X1, . . . , Xn)|∈Rn×p andY= (Y1, . . . , Yn)|. Given tuning parameterλ >0, the Lasso estimator of β0 is
b
βn(λ;Y,X) = arg min
β∈Rp
1
2n||Y−Xβ||
2+λ p
X
j=1
|βj|
.
DefineA0={j : β0,j 6= 0} to be the index set of nonzero coefficients in the true model and let
b An(λ) =
n
j : βbn,j(λ;Y,X)6= 0 o
denote the active set atλ. For anyS⊆ {1, . . . , p}, writeXSto denote the design matrix composed of variables indexed byS; letScdenote the complement of
S andN(S) the number of elements in S. Define Σ=n−1XA0,XAC
0
T
XA0,XAC
0
N nAbn(λ) T
A0
o
; and Ubn(λ) =N n
b
An(λ)\A0
o
. Thus, the false selection rate atλis pn(λ) =
EhUbn(λ)/max n
b
In(λ) +Ubn(λ),1 oi
.
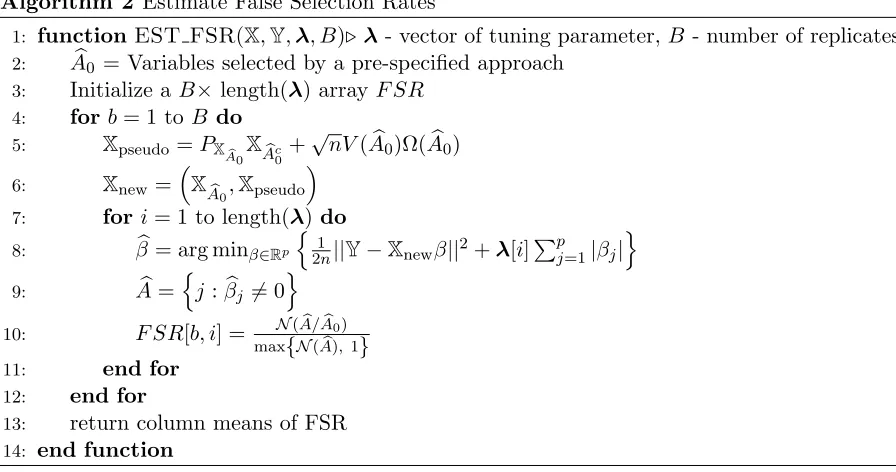
2.2.2 Estimating the false selection rate
In this section, we provide a description of our estimator of the false selection rate for each model
along the Lasso solution path and provide theoretical justification; details of the implementation
are deferred to the subsequent section. The proposed estimator is constructed in three stages:
(S1) apply screening to form a preliminary estimator of the set of nonzero coefficients,A0; (S2)
generate pseudo-variables that mimic the unimportant variables, i.e., those in Ac0; and (S3) apply the Lasso to a dataset composed of the selected variables from the screening step and
the generated pseudo-variables; the proportion of pseudo-variables in the active set, Abn(λ), is the estimated false selection rate at tuning parameter valueλ.
Let r = rank(X) and for any square matrix, U, write U− to denote a pseudo-inverse.
For any non-empty subset S of {1, . . . , p}, define Q11(S) = n−1X|SXS, Q12(S) = n−1X|SXSc,
Q21(S) =n−1X|ScXS, Q22(S) = n−1X|ScXSc, and P
XS = XS(X |
SXS)−X|S. The estimator pbn(λ) of pn(λ) is constructed as follows.
Step 1 (Screening): For the full data (X,Y), apply a viable variable selection method to
construct a preliminary estimator,Ab0,n, of the set of nonzero coefficientsA0. Let b
r0 denote
the rank of XAb0,n.
Step 2 (Pseudo-variable generation): Let Ω(Ab0,n)∈R(r−rb0)×{p−N(
b
A0,n)} satisfy
Ω(Ab0,n)|Ω(Ab0,n) =Q22(Ab0,n)−Q21(Ab0,n)Q−11(Ab0,n)Q12(Ab0,n),
and letV(Ab0,n)∈Rn×(r−rb0) be any orthonormal matrix that is orthogonal to the column
space ofXAb0,n. Pseudo-variables have the form