A Survey on Classification Methodologies of
Retinal Vessel Segmentation
K.Dhanalaxmi, A.Vidhya
PG Scholar, Dept of C.S.E, Valliammai Engineering College, Chennai, India
Assistant Professor , Dept of C.S.E, Valliammai Engineering College, Chennai, India
ABSTRACT: Accurate segmentation of human retina is the most vital factor in diagnosis of eye and systematic diseases. The effective diagnosis and analysis of eye can prevent lot of people from vision impairment. The retina blood vessel and optic disk segmentation is the vital work to identify and notice abnormal variations some of them are bright lesions (exudates and cotton wool spots) and red lesions (haemorrhages and micro aneurysms). The blood vessel segmentation is performed on the basis of blood vessel discrimination such as blood vessel orientation, cross sectional area, surface shapes and abnormal region volumes. The usage of pre-processing technique brings out the approach vessel normalization and vessel enhancement that enhances our segmentation process very well. In this paper an automated method for segmenting the retina has two methodologies they are supervised classification and unsupervised classification.
KEYWORDS: Blood vessel, optic disk, supervised classification, unsupervised classification, segmentation.
I.INTRODUCTION
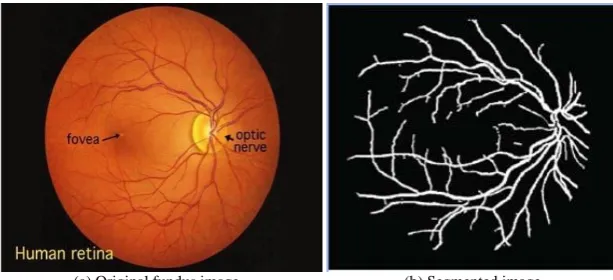
Retinal vessel segmentation involved in the diagnosis of eye and systematic diseases such as cardiovascular disease, diabetic retinopathy, hypertension, choroid neovascularisation, glaucoma, proliferative retinopathy and non-proliferative retinopathy. Vessel segmentation will provide new wisdom to diagnose and stage pathologies which affect both functional and morphological characteristics of blood vessels [1]. The biological feature of vessels designate by length, width, tortuosity, angles and branching pattern among them. Retinal images will directly affect the body vasculature in general, so more number of techniques needed for the detection and further examination of several pathological states as a mean of detecting and characterizing over time any of the changes in the blood vessels. The only part of the central circulation that can be viewed directly and analysed. Changes in blood vasculature structure and vessel distribution caused by systematic diseases can lead to new vessel growth which in turn provokes vision impairment. Hence retinal vessel segmentation gives the detailed information about the location of vessels exactly. The retinal vascular arrangement is unique for each human being and can be used for biometric identification.
be arise of new vessels around optic disk [4] by using Support Vector Machine classifier we can easily diagnose it in consideration of watershed lines and ridge strength measurement. SVM is a linear classifier able to find out best hyper plane separating two classes. It determines a probability of abnormality of all vessel segments. In the detection stage single segment with high abnormality probability was chosen and gets evaluated with a threshold. An Ensemble classification approach is emerged from combining multiple classifiers to solve machine learning problem. It applies to improve the prediction or classification performance of the image. It will combine the results from many weak learners by bagging and boosting algorithms nothing but the bootstrap aggregations techniques.
(a) Original fundus image (b) Segmented image
Figure 1: Blood vessel segmentation
II. RELATED WORK
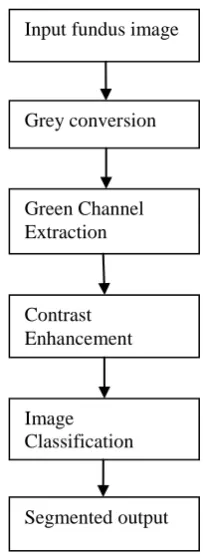
Figure 2: Image Segmentation
III. CLASSIFICATION OF RETINAL VESSEL SEGMENTATION
The vasculature segmentation can be broadly classified as supervised and unsupervised. The supervised classification is defined as process of using samples of known informational classes to classify pixels of unknown identity. The supervised algorithm classifies pixels as vessel and non vessel. This algorithm progress a priori knowledge involving the ground truth of a training set of images while unsupervised classification is trained online during segmentation. The unsupervised classification is either computational intensive or sensitive to retinal abnormalities. The supervised classification comprises from the ground truth consists of two steps feature extraction and classification. In feature extraction, attributes can be derived from hand-crafted and learning based features. The previous classification technique have been deployed pixel processing based method and tracking based methods.
The pixel processing methods executes in two-pass operation works. In initial vessel enhancement and normalisation is done using morphological operations and adaptive histogram equalisation techniques. Next operation is vessel recognition by classify pixels as vessel and non vessel. Some of the pixel processing methods are neural networks and frequency analysers. Tracking based methods simply named as vessel tracking, vectorial tracing or vectorial tracking executes in single-pass operation. It can be done by either manually or automatically. This method first locate the seed points and then trace the vessel pixels from its continuity. The vasculature extraction and recognition done simultaneously easier than pixel processing methods. Both classification and clustering can able to enable in vessel tracking. The tracking methods is progressively more efficient and takes less time in computation compared with pixel processing methods because they will do segmentation using vessel neighbourhood properties. Apart from manual and automated classification sometimes we go for semi-automated methods, it will need some external element to choose input which consumes time. In this paper we are discussing several types of supervised classification and unsupervised classification with different evaluating features. The unsupervised classification is otherwise known as rule based classification. This classification operation enhances the robustness and accuracy of the retinal vasculature segmentation.
Input fundus image
Grey conversion
Contrast Enhancement
Image Classification
Figure 3: Classification Methodologies
3.1 MORPHOLOGICAL OPERATIONS
Morphological operations transform the local pixel for processing region shapes. The binary images are mostly used in this process. The logical transformations based on comparison of pixel neighbourhoods with a pattern. Morphological operations take two arguments- binary image and structuring element. The structuring element comparing with the neighbourhood of each pixel, it determines the output of the morphological operation. The morphological operation on a binary image creates a new binary image in which the pixel has a non-zero value only if the test is successful at that location in the input image. The structuring element is a small binary image (small matrix of pixels, each with a value zero or one).
Fundamental operations are erosion, dilation, opening, closing, hit and miss transform. In erosion 𝐸 the value of the output pixel is the minimum value of all pixels in the input pixel’s neighbourhood. In a binary image, if any of the pixels is set to 0 then the output pixel is set to 0. In dilation 𝐷 the value of the output pixel is the maximum value of all the pixels in the input pixel’s neighbourhood.
𝐸 = {𝑥: 𝑥 + 𝑠 ∈ 𝐵 𝑓𝑜𝑟 𝑒𝑣𝑒𝑟𝑦 𝑠 ∈ 𝑆}
𝐷 = {𝑥: 𝑥 − 𝑠, 𝑦 ∈ 𝐵, 𝑠 ∈ 𝑆}
In a binary image, if any of the pixels is set to 1 then the output pixel is set to 1.Result of dilation or erosion are derived both by size and shape of structuring element. Dilation and erosion are dual operations in which they have opposite effects. Closing of a binary image can be performed by taking the complement of that binary image, opening with the structuring element and taking the complement of the result. The hit and miss transform allows to derive information on how objects in a binary image are related to their surroundings. Both transforms can be used for
VESSEL CLASIFICATION
UNSUPERVISED CLASSIFICATION
MORPHOLOGICAL OPERATION
MULTI SCALE APPROACH
VESSEL TRACKING
MODEL BASED METHOD
SUPERVISED CLASSIFICATION
SUPPORT VECTOR MACHINE
K NEAREST NEIGHBOUR
BAYESIAN CLASSIFIER
detecting specific shapes if the two structuring elements present the desire shape as well as for thickening or thinning of object linear elements.
Morphological filtering of a binary image is conducted by considering compound operations like opening and closing as filters. They may act as filters of shape. For example opening with a disc structuring element smoothens corners from the inside and closing with a disc smooths corners from the outside. But also these operations can filter out from an image any details that are smaller in size than the structuring element (opening is filtering the binary image at a scale defined by the size of the structuring element). Only those portions of the images that fit in the structuring element are passed by the filter, smaller structures are blocked and excluded from the output image. The size of the structuring element is most important to eliminate noisy details but not to damage objects of interest.
3.2 MULTI-SCALE APPROACH
Multi-scale approaches perform segmentation at varying image resolutions from low to high. Major or large vessels are extracted from low resolution images while fine vessels are extracted from high resolution images. After segmenting the major vessel at the low resolution, weak structures such as fine vessels in the neighbourhood of the major vessels can be segmented at higher resolution. Multi resolution factor is one of the key factor .It analysis based on wavelet transform. Their work aims at automated qualitative analysis using velocity sensitive, phase contrast. The segmentation process is applied to the magnitude image and the velocity information from the phase difference image is integrated on the resulting vessel area to get the blood flow measurement. Vessel boundaries are localized by employing a multivariate scoring criterion to minimize the effect of imaging artifacts such as partial volume averaging and flow turbulence. Multi-scale vessel segmentation methods in [6] use neighbourhood analysis and gradient based information for determining the vessel pixels. The main advantage of this technique is increased processing speed and robustness. By using Hessian matrix neighbourhood analysis we are depict the pixel values in 2×2 matrix because we are considering two dimensional fundus images. From the matrix calculate the Eigen values, one denotes the scale of the lowest curvature and another one depicts the highest curvature in the neighbourhood.
𝐻𝑣𝑒𝑠𝑠𝑒𝑙 = 1 − 𝑎𝑙/𝑎ℎ
Where 𝐻𝑣𝑒𝑠𝑠𝑒𝑙 is the resultant, 𝑎𝑙 is the lower and 𝑎ℎ is the higher Eigen value. The two Eigen values are same and
result values are close to similar happened in homogeneous regions of the image.
3.3 VESSEL TRACKING
The vessel tracking methods segment vessel map between two points based on local information. The basic concept behind in the vessel tracking consists in the object along its principal direction. The critical feature such as vessel centreline in retina from which additional information(width, length, contrast, tortuosity ..) can be computed. The tracking algorithms focus on the object of interest and lead to accelerated processing. The procedure starts the tracking process from a given seed point sometimes it deals with an initial direction. In MRA images by interactively setting two consecutive vessel points. These points provide the search direction along which the propagation is performed. In two dimensional image analysis is made by locally exploring the orthogonal to this direction and centred on the estimated centreline point. A more precise location is then extracted for by thresholding and computation of the mass centre. A similar approach is used in analysing CT and MR angiograms, where the first estimation of the next point is corrected by selecting the voxel that maximizes the centre likelihood.
3.4 MODEL BASED METHOD
shapes and vessel bifurcations. Template matching tries to recognize a structure model in an image. It follows a top down approach. Thus dynamic programming is an effective method used for recognition process in biometric field. The generalized cylinder used to represent cylindrical objects. Technically this model identical to parametric model but there is a significant amount of processing steps get differ.
3.5 SUPPORT VECTOR MACHINE
SVM is a robust technique for data regression and classification. It is used as a model for statistics and computer science to perform supervised learning methods that are used to analyse data and recognize patterns. It is a discriminative classifier. It relies on a linear separation in a high dimension feature space where the data have been previously mapped considering eventual nonlinearities. SVM classification uses different planes in space to divide data points. This classifier does not support multi class representation and only supports binary classification i.e)lib-svm toolbox in MATLAB.
The goal of SVM classification is to produce a model based on the training data, which will be able to predict class labels of the test data accurately. Support vector in [7] contain all the information needed about the classification problem, since even if all the other vectors are removed the solution will still be the same. The optimization problem and the decision function can be expressed in dual form which depends only on dot products between vectors. The main advantages SVM performs well on datasets that have many attributes, even when there are only a few cases that are available for the training process. The disadvantages are limitations in speed and size during both training and testing phase of the analysis.
3.6 K-NEAREST NEIGHBOUR
KNN algorithm is a method for classifying objects based on closest training examples in the feature space. This algorithm is simplest of all machine learning algorithms training process for this algorithm only consists of storing feature vectors and labels of the training images. It is a conventional non-parametric, calculates the distance between feature vector of input image and feature vector of training image database. KNN is a type of instance based learning or lazy learning where the function is only approximated locally.
In the classification process the unlabeled query point is simply assigned to the label of its K nearest neighbours. Typically the object is classified based on the label of its K-nearest neighbour by majority vote. If K=1, the object is simply classified as the class of the object nearest to it. When there are only two classes, K must be an odd integer. However there can still be lies when K is an odd integer when performing multiclass classification. A main advantage of the KNN algorithm is performance, it works well with multi-modal classes because the basis of its decision is based on a small neighbourhood of similar objects. Therefore, even if the target class is multi-modal, the algorithm can still lead to good accuracy and efficiency. However a major disadvantage of the KNN algorithm is that it uses all features equally in computing for similarities. This can lead to classification errors, especially when there is only a small subset of features that get used in classification.
3.7 BAYESIAN CLASSIFIER
Bayesian classifier is a simple technique in which that assign class lables to problem instances represented as vectors of feature values, where the class labels are drawn from finite set [8]. It comes under the category of probabilistic classifier. This is not a single algorithm for training classifiers it will be family of algorithms based on a common principle. It can be trained very efficiently in a supervised learning setting. Bayesian is a conditional probability model. The naïve classifier combines this model with a decision rule. One common rule is to select the most probable hypothesis known as maximum a posterior or MAP decision rule. The Bayesian classifier is a traditional static based classifier that analyses discriminat functions. By using this theory we can detect the affected image. Following divisions are derived from characteristic methodologies they are Gaussian, multinomial and Bernoulli.
through probability density function. It is a probabilistic model that assumes all the data points are generated from a mixture of a finite number of Gaussian distributions with unknown parameters. The object implements the expectation maximization algorithm for fitting the mixture models.
3.8 PROBABILISTIC NEURAL NETWORK
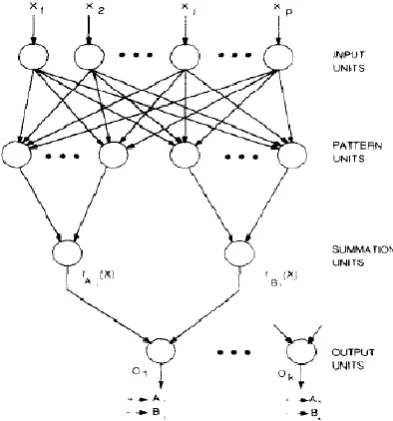
In successive sections many interconnected processing units or neurons are arranged. From initial node it will not start computation and segment the input to the neurons in the network. If the pattern gets received from input layer x, the processing units of the pattern layer computes its output. The neuron approach maximum likelihood of pattern x being classified into cby summarizing and averaging of all the outcome of neurons that belong to the similar class. The total number of samples is denoted by N in the class c. The probabilities for each class are the same, the losses associated with making an incorrect decision for each class are the same. The neuron summation layer draws from the Bayesian decision rule
𝐶 𝑥 = arg max{𝑃 𝑥 }
Where, 𝐶 𝑥 represents the estimate class of the pattern x. All the specific images comprise combination of values in the input vector termed as input pattern describes the operating characteristic of the image. In the pattern layer , the total number of neurons is equal of the sum of the neurons used to represent the pattern of all categories separately. Each category contains many training patterns or vectors whose dimension is equal to the number of input factors. The pattern layer uses the activation function nothing but the Gaussian kernel.
Figure 4: Probabilistic neural network
IV.CONCLUSION
R
EFERENCES[1]. M.D.Abrmoff, M.K.Garvin, and M.Sonka, “ Retinal imaging and image analysis, ” IEEE Trans. Med. Imag., vol.3, pp. 169-208, Jan. 2010. [2]. A.Mendonca, and A.Campilo, “ Segmentation of retinal blood vessels by combining the detection of centerlines and morphological reconstruction, ” IEEE Trans. Med. Imag., vol. 25, no. 9, pp. 1200-1213, Sep. 2006.
[3]. S.Roychowdury, D.Koozekanani, and K.Pari, “DREAM: Diabetic retinopathy analysis using machine learning,” IEEE J.Biomed. Health Informat., no. 99, Dec. 2013.
[4]. Keith A.Goatman, Alan D.Fleming, Sam Philip, Graeme .Williams, Jon A.Olson, and Peter F.Sarp, “Detection of New Vessels on the optic disc using Retinal Photographs, ” IEEE Trans. Med. Imag., vol. 30, no. 4, Apr. 2011.
[5]. Ana Salazar Gonzalez, DjibrilKaba, Yongmin Li, and Xiaoui Liu, “ Segmentation of the blood vessels and optic disk in retinal images, ”. [6]. A.Budai, G.Michelson, and J. Hornegger, “Multiscale blood vessel segmentation in retinal fundus images, ”ProcBildverarbeitungfr die Med., pp. 261-265, Mar. 2010.
[7]. E.Ricci, and R.Perfetti, “Retinal blood vessel segmentation using line operators and support vector classification, ” IEEE Trans. Med. Imag., vol. 26, no. 10, pp. 1357-1365, Oct. 2007.