Reinforcement learning based navigation for autonomous mobile robots in unknown environments
Full text
Figure
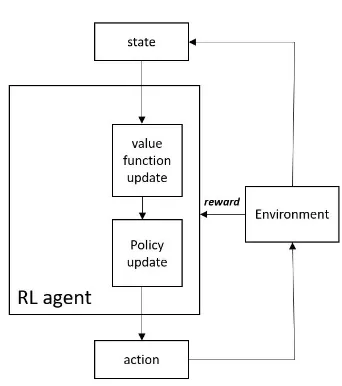
![Figure 2.1: The agent-environment interaction in a Markov decision process [28].](https://thumb-us.123doks.com/thumbv2/123dok_us/9662025.468189/16.595.156.415.257.349/figure-agent-environment-interaction-markov-decision-process.webp)
![Figure 2.5: The tabular prioritized sweeping algorithm [28].](https://thumb-us.123doks.com/thumbv2/123dok_us/9662025.468189/20.595.94.475.236.451/figure-the-tabular-prioritized-sweeping-algorithm.webp)
![Figure 2.6: SSMR free body diagram [13].](https://thumb-us.123doks.com/thumbv2/123dok_us/9662025.468189/22.595.182.380.479.666/figure-ssmr-free-body-diagram.webp)
![Figure 2.8: Wheel velocities [13].](https://thumb-us.123doks.com/thumbv2/123dok_us/9662025.468189/23.595.205.397.190.396/figure-wheel-velocities.webp)
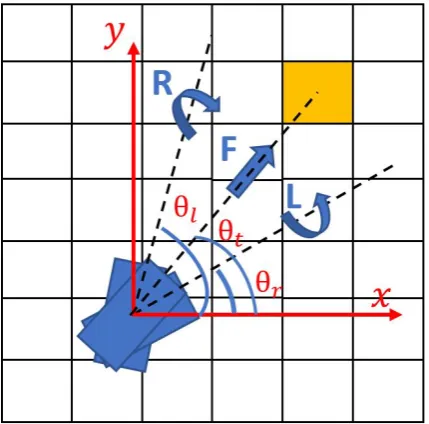
![Figure 3.9: SSMR free body diagram [13].](https://thumb-us.123doks.com/thumbv2/123dok_us/9662025.468189/36.595.184.382.423.630/figure-ssmr-free-body-diagram.webp)
![Figure 3.10: Velocities of one wheel [13].](https://thumb-us.123doks.com/thumbv2/123dok_us/9662025.468189/37.595.202.396.230.421/figure-velocities-of-one-wheel.webp)
![Figure 3.11: Longitudinal slip as a function of friction coefficient [1].](https://thumb-us.123doks.com/thumbv2/123dok_us/9662025.468189/38.595.124.447.72.256/figure-longitudinal-slip-function-friction-coefcient.webp)
Related documents
The purpose of this interview is to get your view regarding the reasons that result to non – compliance state of compliance with the conditions of employment in this company and
The primary correctness property for reinforcement learning algorithms is convergence: in the limit, a reinforcement learning algorithm should converge to a policy that optimizes
The scope of this paper is to review leakage current monitoring conducted by different researchers worldwide primarily in respect to the variety of applications, the waveform
The key differences among the individual bricks-and-mortar retail concepts for pet supplies are the product range and product positioning: While large- scale supermarkets
For SiteLock and TRUSTe certificates, the admin contact email address is used when creating a Domain Admin account (if username and password
This table shows how well our Bachelor of Science in Human Services Management students performed on an end of program assessment compared with other schools accredited by the
Post Doctoral Work, Management, University of Tennessee, Chattanooga EdD, Business, University of Georgia MEd, Business, University of Georgia BS, Business Education, University of
Lambdin & Chaney, LLP specializes in insurance-related issues and provides litigation and other legal services to businesses, individuals,. insurance companies, and
