Two wheeled balancing robot controller designed using pid
Full text
Figure
![Figure 2.1: JOE developed by Grasser et.al [7].](https://thumb-us.123doks.com/thumbv2/123dok_us/8763763.895317/18.612.268.380.87.289/figure-joe-developed-grasser-et-al.webp)

![Figure 2.4: Eyebot developed by Rich Ooi (adapted from [9])](https://thumb-us.123doks.com/thumbv2/123dok_us/8763763.895317/20.612.241.415.463.674/figure-eyebot-developed-rich-ooi-adapted.webp)
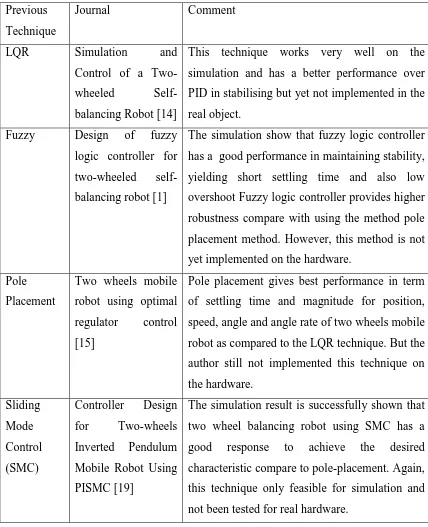
![Figure 2.5: Free body diagram of the inverted pendulum system (adapted from [11])](https://thumb-us.123doks.com/thumbv2/123dok_us/8763763.895317/21.612.244.427.550.691/figure-free-body-diagram-inverted-pendulum-adapted.webp)




Outline
Related documents
The Concept-based Mining Model system is a text mining application that uses the concept based similarity measure to determine the similarity measure between the documents.. A
Following these principles, we carried out a randomized prospective study and we compared functional and radiological outcomes and complication rate in patients treated with two
Wu et al Virology Journal 2014, 11 192 http //www virologyj com/content/11/1/192 RESEARCH Open Access Protease 2A induces stress granule formation during coxsackievirus B3 and enterovirus
Abstract The impregnation of various simple phenolic and natural polycyclic compounds into wood was investigated from the viewpoints of vibrational property and
Pengambilan bobot brangkasan kering tanaman pada saat fase vegetatif maksimum (6 MST) yang dilakukan pada petak destruktif dengan mengambil 3 sampel tanaman di bagian tengah dan
The study assumes that the accuracy in the initial estimate (bias) of a completed project is the difference between the actual project completion costs minus the
The output diode reverse recovery is alleviated by the leakage inductance of the coupled inductor.Without increasing the duty cycle of the switch by connecting
When interaction effects were smaller (although still fairly large, explaining 5% of the phenotypic variance), epistasis was detected in only 9% of pedigrees containing 320
