2017 2nd International Conference on Computer, Network Security and Communication Engineering (CNSCE 2017) ISBN: 978-1-60595-439-4
A Localisation Algorithm Using Unique Performance Reference
Profiles for Internet-of-Things
Paul Ruen Chze Loh, Siew Leong Kan, Kok Poh Ng, Khoon Wee Ang,
Jun Jie Yong and Siew Wing Hing
Communications & Networks Group, School of Engineering, Nanyang Polytechnic, Singapore
Keywords: Localisation, Multi-layer, IoT, Unique parameters, Relative performance.
Abstract. This paper presents a localisation algorithm using unique network parameters exhibited at different physical locations. The algorithm computes location of devices based on relative multi-layer network performances between a node and devices. All the devices and node can be mobile and the algorithm does not require any stationary infrastructure as an anchor. Experimental tests were conducted to locate an empty parking lot in a carpark. It was shown that the algorithm achieved 87% accuracies of locating an empty parking lot.
Introduction
As sensor and machine-to-machine (M2M) communication technologies advances, more objects are becoming embedded with sensors and gaining the ability to communicate and collaborate. Internet of things (IoT) enables these objects to be uniquely recognizable, controllable and share information with other objects in the network through the well-known Internet Protocol (IP). For most IoT applications, the location of the IoT node is as important as the sensed data or information generated. In tandem with the growth of massive use of IoT nodes and emerging mobile IoT applications, key challenges exist in the practicality of locating IoT nodes in dense nodes deployment without the use of additional hardware, and locating IoT nodes while the anchor node itself is non-stationary, i.e, mobile.
The estimation of the position of an object either indoor or outdoor is a notable challenge [1, 2].
Some existing localization approaches such as time-of-arrival (TOA) [3, 4],
time-difference-of-arrival [5, 6] , and angle-of-arrival [7, 8] achieve accurate localization results, but the solutions require high cost, complicated timing and synchronization. On the other hand, network parameters such as Received Signal Strength Index (RSSI), Bit Rate (BR), Link Quality (LQ) and Round-Trip-Time (RTT) are easily obtainable [9, 10].
The contribution of this paper is threefold. Firstly, the performance reference profiles (PRP) of three locations in an open-air carpark were collected and shown to be unique. Secondly, a localisation algorithm using the PRP is presented. Thirdly, we present experimental results of the localisation algorithm using the PRP collected.
This paper is organized as follows. Section II describes the Performance Reference Profile collection process. A localisation algorithm is presented in Section III. Section IV discusses the results of the experimental tests conducted followed by future work and conclusion in Section V.
Performance Reference Profile (PRP)
Preparation
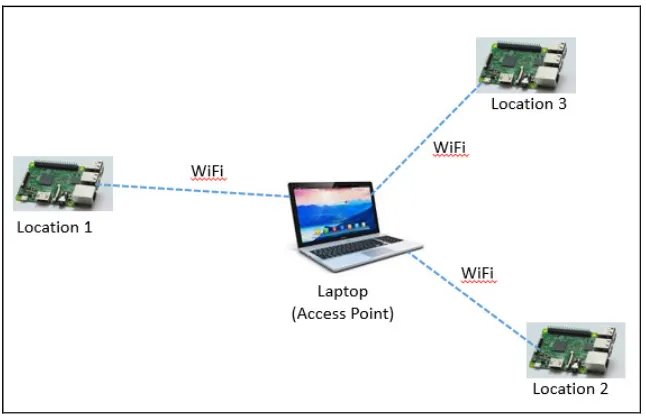
Figure 1. Overview of the Network Setup.
[image:2.612.129.484.402.602.2]The equipment used in our experiments include a laptop installed with Windows 10 and three Raspberry Pi 3 Model B. The laptop was HP EliteBook Intel Core i7-5600U CPU@26GHz with 8GB RAM and Intel Dual Band Wireless-AC 7265. The three Raspberry Pi were each embedded with a 1.2GHz 64-bit quad-core ARMv8 CPU, 1 GB RAM and 80211n wireless interface. Each of the Raspberry Pi (RP) was placed in three different locations within an open-air carpark as shown in Figure 2. The laptop was configured as an access point for associating the three RP so that the network parameters of each RP with reference to the laptop could be recorded in a MySQL database in the laptop.
Figure 2. Locations Within An Open-Air Carpark.
The aim of this setup was to collect the network parameters for baselining the PRP of the three locations so that the information can be used to determine the position of an empty parking lot and inform a driver (with a laptop) who driving along a road indicated in Figure 2. The network parameters of each location includes the values of Received Signal Strength Index (RSSI), Bit Rate (BR), Link Quality (LQ) and Round-Trip-Time (RTT) for that location with reference to the laptop.
PRP Collection Process
12pm, 12pm to 3pm and 3pm to 6pm). The RSSI, BR, LQ and RTT of each location were recorded for 15 minutes at each location and the mean of each parameters ( , , and ) were calculated in each RP and transmitted to the laptop for storage in the MySQL database. In total, there were more than 480,000 network parameters collected during the 4 weeks, 20 days and 60 timeslots of the three locations. Figure 3 shows the raw network parameters captured for Location 1 during one of the Mondays for the 9am to 12pm timeslot.
Figure 3. Raw Network Parameters at Location 1, Monday, 9am to 12pm.
The , , and were stored using the database schema: Day, Timeslot, Location, ,
, and .
Localization Algorithm
Input : Day15, Timeslot15, 15, 15, 15, 15
Output: Loc15
1. min=0; mint=max;
2. while (Day≠Day15) do next Day;
3. while (Timeslot≠Timeslot15) do next Timeslot; 4. for (k=1 to m)
5. for (i=1 to j) 6. min= i – i,15)
7. end for;
8. if (min < mint) then
9. Loc15 = Loc{ k, k, k, k};
10. end if; 11. end for;
12. end while;
13.end while;
14.output Loc15
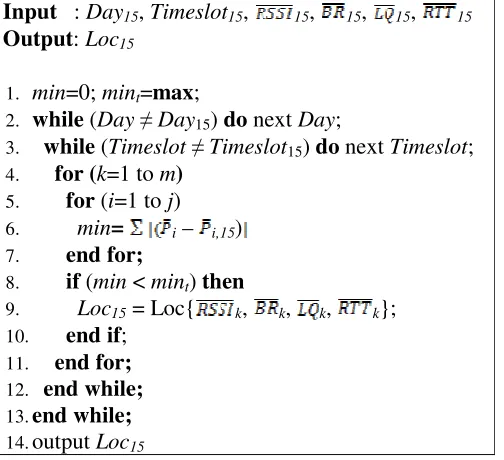
[image:3.612.184.436.480.710.2]In this section, we propose a localisation algorithm shown in Figure 4 to find the location of empty parking lot. The driver used the laptop to trigger the measurement of RSSI, BR, LQ and RTT of each location for 15 seconds and the mean of each parameters ( 15, 15, 15 and 15) were
computed. Let Day15 and Timeslot15 be the day of the week and timeslot that the driver wanted to locate an empty parking lot. The variable, j is the number of different types of network parameters collected and Pj is a set of network parameters where j={ , , , }. Therefore, the set of
corresponding network parameters measured within the 15 seconds is j,15={ 15, 15, 15,
15}.
The algorithm first check for the correct Day and Timeslot when the driver activate the algorithm to find an empty parking lot (Lines 2 and 3). The variable, m is the total number of entries stored in the database for the same Day and Timeslot. Lines 4 to 7 computes the summation of the absolute difference of each network parameters for each m entry to be stored as min. The computed min is compared with mint in Line 8. If the value of min is smaller than mint, the location of an empty lot,
Loc15 will be updated in Line 9. The algorithm continues until all the m entries in the database are evaluated and output the Loc15 in Line 14 that indicates the location of the empty parking lot.
The time complexity of the localisation algorithm is as follows. The worst case of (Day≠Day15) and (Timeslot≠Timeslot15) is when both Day and Timeslot need to compute till the last entry in the database, thus, the two while-loops have O(|Day|*|Timeslot|). Lines 4 to 11 has O(m*j), thus, the time complexity of the localisation algorithm is O(|Day|*|Timeslot|*m*j).
Experimental Tests
Numerous tests were conducted using the localisation algorithm for different Day and different
Timeslot using the network setup shown in Figure 2. During each test, a laptop was used to trigger the measurement of RSSI, BR, LQ and RTT of one location for 15 seconds. The algorithm was then used to locate the empty parking lot. In total, 90 experimental tests were conducted using various locations for different days and timeslots of the week. Out of the 90 tests, our localisation algorithm was able to obtain an accuracy of 87%. Tests were also conducted by reducing the parameters measurement time to 5 and 10 seconds. However, the accuracies of the algorithm reduced significantly to 35% and 63% respectively. In addition, the parameters measurement time was also increased to 30 and 45 seconds, however, the additional time taken to measure the network parameters did not improve the accuracy of the algorithm greatly.
Future Work and Conclusion
In this paper, the performance reference profile (PRP) of three locations in an open-air carpark were shown to be unique and a localisation algorithm using the PRP is presented. Our experimental results showed that the algorithm is able to obtain 87% accuracy to locate an empty parking lot. In future, we intend to compare the performance of our localisation algorithm with existing solutions that use K-Nearest Neighbors (kNN) [11, 12] and Support Vector Machine (SVM) [13, 14].
Acknowledgement
The authors would like to thank the Ministry of Education of Singapore for providing the funding available for this project.
References
[1] K. Lin, et al., "Enhanced fingerprinting and trajectory prediction for IoT localization in smart buildings," IEEE Transactions on Automation Science and Engineering, vol. 13, pp. 1294-1307, 2016.
[2] S. K. Pandey and M. A. Zaveri, "Localization for collaborative processing in the internet of things framework," in Proceedings of the Second International Conference on IoT in Urban Space, 2016, pp. 108-110.
[3] S. Gao, et al., "Robust Second-Order Cone Relaxation for TW-TOA-Based Localization With Clock Imperfection," IEEE Signal Processing Letters, vol. 23, pp. 1047-1051, 2016.
[4] J. M. Pak, et al., "Distributed Hybrid Particle/FIR Filtering for Mitigating NLOS Effects in TOA Based Localization Using Wireless Sensor Networks," IEEE Transactions on Industrial Electronics, 2016.
[5] L. Wang, et al., "Self-localization of Ad-hoc arrays using time difference of arrivals," IEEE Transactions on Signal Processing, vol. 64, pp. 1018-1033, 2016.
[6] A. Makki, et al., "Indoor localization using 802.11 time differences of arrival," IEEE Transactions on Instrumentation and Measurement, vol. 65, pp. 614-623, 2016.
[7] J. A. Zhang, et al., "Angle-of-Arrival Estimation Using Different Phase Shifts Across Subarrays in Localized Hybrid Arrays," IEEE Communications Letters, vol. 20, pp. 2205-2208, 2016.
[8] P. Xu, et al., "Angle of arrival (AOA)-based Cross-localization Algorithm using Orientation Angle for Improved Target Estimation in Far-field Environments," International Journal of Simulation—Systems, Science & Technology, vol. 17, 2016.
[9] H. Dai, et al., "Multi-layer neural network for received signal strength-based indoor localisation," IET Communications, vol. 10, pp. 717-723, 2016.
[10] T. Zhang, et al., "Joint power and bandwidth allocation in wireless cooperative localization networks," IEEE Transactions on Wireless Communications, vol. 15, pp. 6527-6540, 2016.
[11] Z. Gu, et al., "Reducing fingerprint collection for indoor localization," Computer Communications, vol. 83, pp. 56-63, 2016.
[12] Y. Xie, et al., "An improved K-nearest-neighbor indoor localization method based on spearman distance," IEEE Signal Processing Letters, vol. 23, pp. 351-355, 2016.
[13] D. de Arruda and G. P. Hancke, "Wearable device localisation using machine learning techniques," in Industrial Electronics (ISIE), 2016 IEEE 25th International Symposium on, 2016, pp. 1110-1115.