HAL Id: hal-01626894
https://hal.inria.fr/hal-01626894
Submitted on 31 Oct 2017
HAL
is a multi-disciplinary open access
archive for the deposit and dissemination of
sci-entific research documents, whether they are
pub-lished or not. The documents may come from
teaching and research institutions in France or
abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire
HAL
, est
destinée au dépôt et à la diffusion de documents
scientifiques de niveau recherche, publiés ou non,
émanant des établissements d’enseignement et de
recherche français ou étrangers, des laboratoires
publics ou privés.
Distributed under a Creative Commons
Attribution| 4.0 International License
Double Convergence of a Family of Discrete Distributed
Mixed Elliptic Optimal Control Problems with a
Parameter
Domingo Tarzia
To cite this version:
Domingo Tarzia. Double Convergence of a Family of Discrete Distributed Mixed Elliptic Optimal
Control Problems with a Parameter. 27th IFIP Conference on System Modeling and Optimization
(CSMO), Jun 2015, Sophia Antipolis, France. pp.493-504, �10.1007/978-3-319-55795-3_47�.
�hal-01626894�
DOUBLE CONVERGENCE OF A FAMILY OF
DISCRETE
DISTRIBUTED
MIXED
ELLIPTIC
OPTIMAL
CONTROL
PROBLEMS
WITH
A
PARAMETER
Domingo Alberto Tarzia
CONICET - Depto. Matemática, FCE, Univ. Austral Paraguay 1950, S2000FZF Rosario, Argentina.
Abstract. The convergence of a family of continuous distributed mixed elliptic optimal control problems (Pα), governed by elliptic variational equalities, when the parameter α→ ∞ was studied in Gariboldi - Tarzia, Appl. Math. Optim.,
47 (2003), 213-230 and it has been proved that it is convergent to a distributed mixed elliptic optimal control problem (P). We consider the discrete approxi-mations (Phα) and (Ph) of the optimal control problems (Pα) and (P) respec-tively, for each h>0 and α >0. We study the convergence of the discrete distributed optimal control problems (Phα) and (Ph) when h→0, α→ ∞ and
α → +∞
( , )h (0, ) obtaining a complete commutative diagram, including the di-agonal convergence, which relates the continuous and discrete distributed mixed elliptic optimal control problems
(
Phα) ( ) ( )
, Pα , Ph and (P) by takingthe corresponding limits. The convergent corresponds to the optimal control, and the system and adjoint system states in adequate functional spaces.
Keywords. Double convergence, Distributed optimal control problems, Elliptic variational equalities, Mixed boundary conditions, Numerical analysis, Finite element method, Fixed points, Optimality conditions, Error estimations.
1
Introduction
The purpose of this paper is to do the numerical analysis, by using the finite element method, of the convergence of the continuous distributed mixed optimal con-trol problems with respect to a parameter (the heat transfer coefficient) given in [10, 11] obtaining a double convergence when the parameter of the finite element method goes to zero and the heat transfer coefficient goes to infinity.
We consider a bounded domain n
Ω ⊂R whose regular boundary 1 2
Γ
=
∂Ω
=
Γ ∪Γ
consists of the union of two disjoint portions Γ1 and Γ2 with meas 1( ) 0
Γ
>
. We consider the following elliptic partial differential problems with mixed boundary conditions, given by:1 2 in ; on ; u on u g u b q n ∂ −Δ = Ω = Γ − = Γ ∂ , (1) 1 2 in ; u ( ) on ; u on u g u b q n
α
n ∂ ∂ −Δ = Ω − = − Γ − = Γ ∂ ∂ (2)where g is the internal energy in Ω, b Const= . 0> is the temperature on Γ1 for the
system (1) and the temperature of the external neighborhood on Γ1 for the system (2)
respectively,
q
is the heat flux on Γ2 and α >0 is the heat transfer coefficient on 1Γ . The systems (1) and (2) can represent the steady-state two-phase Stefan problem
for adequate data [21, 22]. We consider the following continuous distributed optimal
control problem
( )
P
and a family of continuous distributed optimal control problems( )
P
α for each parameter α >0, defined in [10],where the control variable is theinternal energy
g
in Ω, that is: Find the continuous distributed optimal controls2( )
op
g ∈H L= Ω and gαop∈H (
f
or each
α >0) such that:( )
( )
( )
( )
Problem (P): J gop =ming H∈ J g , Problem ( ) : Pα J gα αop =ming H∈ J gα (3) where the quadratic cost functional J J, α:H 0+
→R aredefined by[2, 18, 26]: 2 2 2 2 1 1 ) ( ) , ) ( ) 2 g d H 2 H 2 g d H 2 H M M a J g = u −z + g b J gα = uα −z + g (4)
with M>0 and
z
d∈
H
given, ug∈Kand uαg∈V are the state of the systems de-fined by the mixed ellliptic differential problems (1) and (2) respectively whose elli
p-tic variational equality aregiven by [16]:
(
)
(
)
2 0 : , , , g g u K a u v g v qvdγ
v V Γ ∈ = −∫
∀ ∈ (5)(
)
(
)
2 1 : , , , g g uα V a uα α v g v qvdγ α
bvdγ
v V Γ Γ ∈ = −∫
+∫
∀ ∈ (6)and their adjoint system states pg∈V and pαg∈V are defined by the following elliptic variational equalities:
(
) (
)
0(
) (
)
) g o: g, g d, , ; ) g : g, g d, ,
a p ∈V a p v = u −z v ∀ ∈v V b pα ∈V a pα α v = uα −z v ∀ ∈v V (7)
with the spaces and bilinear forms defined by:
{
}
1 2 2
0 1 0 2
( ), , / 0 , , ( ), ( )
(
)
(
)
(
)
1 , . , , , , ( , ) a u v u vdx a u vα a u vα
uvdγ
u v uv dx Ω Γ Ω =∫
∇ ∇ = +∫
=∫
(9)where the bilinear, continuous and symmetric forms a and aα are coercive on V0 and V respectively, that is [16]:
2 0 0 such that vV a v v( , ), v V
λ
λ
∃ > ≤ ∀ ∈ (10) 21min(1, ) 0 such that vV a v v( , ), v V
α α α
λ
λ
α
λ
∃ = > ≤ ∀ ∈ (11)
and
λ
1>
0
is the coercive constant for the bilinear form a1[16, 21]. The unique continuous distributed optimal energies gop andop
gα have been characterized in [10] as a fixed point on H for a suitable operators W and
W
α over their optimal adjoint system states 0op
g
p ∈V and pαgαop ∈V defined by:
( )
1( )
1, : such that ) g, ) g
W W H H a W g p b W g p
M M
α → =− α =− α . (12)
The limit of the optimal control problem (Pα) when α → ∞ was studied in [10] and it was proven that:
lim 0, lim 0, lim op op 0
op op op op g g g g H V V u u p p g g α α α α α α→∞ − = α→∞ − = α→∞ − = (13)
for a large constant M>0 by using the characterization of the optimal controls as fixed points through operators (12a) and (12b); this restrictive hypothesis on data was eliminated in [11] by using the variational formulations. We can summary the condi-tions (13) saying that the distributed optimal control problems (Pα ) converges to the distributed optimal control problem (P) when α →+∞.
Now, we consider the finite element method and a polygonal domain n Ω ⊂R
with a regular triangulation with Lagrange triangles of type 1, constituted by affine-equivalent finite element of class C0 being h the parameter of the finite element approximation which goes to zero [3,7]. Then, we discretize the elliptic variational equalities for the system states (6) and (5), the adjoint system states (7a) and (7b), and the cost functional (4a,b) respectively. In general, the solution of a mixed elliptic boundary problem belongs to r
( )
H Ω with 1<r≤32−
ε ε
( >0) but there exist some examples which solutions belong to Hr( )
Ω with 2≤r [1, 17, 20]. Note that mixed boundary conditions play an important role in various applications, e.g. heat conduction and electric potential problems [12].
The goal of this paper is to study the numerical analysis, by using the finite ele-ment method, of the convergence results (13) corresponding to the continuous
distrib-uted elliptic optimal control problems
( ) and ( )
P
αP
when α →+∞. The main resultof this paper can be characterized by the following result:
Theorem 1
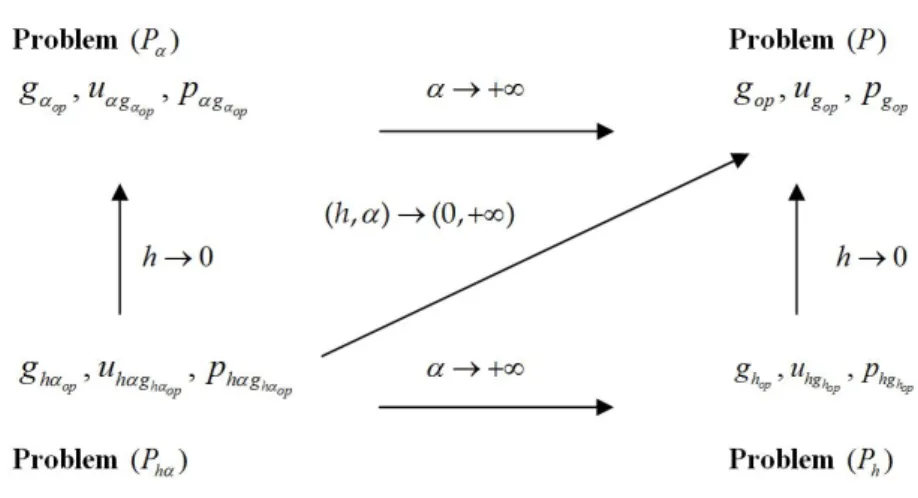
We have the following complete commutative diagram which relates the continu-ous distributed mixed optimal control problems
( )
P
α and( )
P
, with the discrete dis-tributed mixed optimal control problems(
P
hα)
and( )
P
h and it is obtained by taking the limits h→0,α →+∞ and( , )
h
α →
(0,
+
∞
)
, as in Figure 1, whereg
hαop,h op
h g
u
αα and
p
h gα h opα are respectively the optimal control, the system and the adjoint system states of the discrete distributed mixed optimal control problem(
P
hα)
for each0
h> and α >0, and the double convergence is the diagonal one.
Fig. 1. Relationship among optimal control problems
(
Phα) ( ) ( )
, Pα , Ph and ( )P by taking thelimits h→0, α→+∞ and ( , )hα →(0,+∞).
The study of the limit h→0 of the discrete solutions of optimal control
problems can be considered as a classical limit, see [4-6, 8, 9, 13-15, 19, 23, 24, 27, 28] but the limit α →+∞, for each h>0, and the double limit
( , )
h
α →
(0,
+
∞
)
can be considered as a new ones.The paper is organized as follows. In Section II we define the discrete elliptic variational equalities for the state systems uhg and
α
h g
u , we define the discrete dis-tributed cost functional Jh and
J
hα, we define the discrete distributed optimal control problems( )
P
h and(
P
hα)
, and the discrete elliptic variational equalities for thead-joint state systems phg and ph gα for each h>0 and α >0, and we obtain properties
for the discrete optimal control problems
( )
P
h and(
P
hα)
. In Section III we study theclassical convergences of the discrete distributed optimal control problems
( )
P
h to( )
P
, and(
P
hα)
to( )
P
α when h→0 (for each α>0) and the estimations for thediscrete cost functional Jh and α h
J
. In Section IV we study the new convergence of the discrete distributed optimal control problems(
P
hα)
to( )
P
h whenα
→
+
∞
for eachh
>
0
and we obtain a commutative diagram which relates the continuous and discrete distributed mixed optimal control problems(
Phα) ( ) ( )
, Pα , Ph and( )
P
by taking the limits h→0 and α →+∞. In Section V we study the new doubleconver-gence of the discrete distributed optimal control problems
(
P
hα)
to( )
P
whenα →
+
∞
( , )
h
(0,
)
and we obtain the diagonal convergence in the previous commuta-tive diagram.2
Discretization by Finite Element Method and Properties
We consider the finite element method and a polygonal domain nΩ ⊂R with a regular triangulation with Lagrange triangles of type 1, constituted by affine-equivalent finite element of class C0 being h the parameter of the finite element approximation which goes to zero [3, 7]. We can take h equal to the longest side of the triangles
T
∈
τ
h and we can approximate the setsV V
,
0and
K
by:( )
( )
{
0}
{
}
1 0 1 0 / , , / 0 ; h h h h h h h h h h V = v ∈C Ω v T P T∈ ∀ ∈T τ V = v ∈V v Γ = K = +b V (14)where P1 is the set of the polymonials of degree less than or equal to 1. Let 0
: ( )
h C Vh
π
Ω → be the corresponding linear interpolation operator. Then there existsa constant
c
0>
0
(independent of the parameter h) such that [3]:( )
( )
1( )
0 0 ) r ; ) r ; r ,1 2 h H r h V r a vπ
v c h v b vπ
v c h− v v H r − ≤ − ≤ ∀ ∈ Ω < ≤ . (15)We define the discrete cost functional J Jh, hα:H 0+
→R by the following expressions:
( )
1 2 2( )
1 2 2 ) , ) 2 2 2 2 h hg d H H h h g d H H M M a J g = u −z + g b Jα g = uα −z + g (16)where uhg and uh gα are the discrete system states defined as the solution of the fol-lowing discrete elliptic variational equalities [16, 24]:
(
)
(
)
2 0 : , , , hg h hg h h h h h u K a u v g v qv dγ
v V Γ ∈ = −∫
∀ ∈ , (17)(
)
(
)
2 1 : , , , h g h h g h h h h h h uα V a uα α v g v qv dγ α
bv dγ
v V Γ Γ ∈ = −∫
+∫
∀ ∈ . (18)The corresponding discrete distributed optimal control problems consists in finding ghop,ghαop∈Hsuch that:
( )
( )
(
)
( )
) Problem ( ) : , ) Problem ( ) : op op h h h g H h h h h g H h a P J g Min J g b Pα Jα gα Min Jα g ∈ ∈ = = (19)and their corresponding discrete adjoint states phg and ph gα are defined respectively as the solution of the following discrete elliptic variational equalities:
(
) (
)
0 : , , , 0 hg h hg h hg d h h h p ∈V a p v = u −z v ∀ ∈v V (20)(
) (
)
: , , , h g h h g h h g d h h h pα ∈V aα pα v = uα −z v ∀ ∈v V (21)Remark 1. We note that the discrete (in the n-dimensional space) distributed opti-mal control problem (Ph) and (
P
hα) are still infinite dimensional optimal control problems since the control space is not discretized.Lemma 2
(i) There exist unique solutions uhg∈Kh and phg∈V0h, and uh gα ∈Vh and
h g h
pα ∈V of the elliptic variational equalities (17) and (20), (18), and (21)
respec-tively ∀ ∈g H, ∀ ∈q Q,
b
>
0
on
Γ
1.(ii) The operators g H∈ →uhg∈V, and g H∈ →uh gα ∈V are Lipschitzians.
The operators g H∈ →phg∈V0g, and g H∈ → ph gα ∈Vh are Lipschitzians and
strictly monotone operators.
Proof. We use the Lax-Milgram Theorem, the variational equalities (17), (18), (20) and (21), the coerciveness (10) and (11) and following [10, 18, 25].
W
Theorem 3
(i) The discrete cost functional
J
h andJ
hαare H- elliptic and strictly convexe applications, that is(
∀g g1, 2∈H,∀ ∈t[ ]
0,1)
:(
) ( )
( )
(
(
)
)
(
)
2 2 1 1 2 2 1 1 1- 1 2 h h h H t t t J g +tJ g −J tg + −t g ≥M − g −g (22)(
)
( )
2( )
1(
1(
)
2)
(
)
2 1 2 1 1- 1 2 h h h H t t t Jα g +tJα g −Jα tg + −t g ≥M − g −g (23)(ii) There exist a unique optimal controls
op
h
g ∈H and ghαop∈H that satisfy the
optimization problems (19a) and (19b) respectively.
(iii)
J
h andJ
hα are Gâteaux differenciable applications and their derivatives are given by the following expressions:( )
( )
) h hg, ) h h g, , 0
a J gʹ =Mg p+ b Jʹα g =Mg p+ α ∀ ∈g H ∀h> (24)
(iv) The optimality condition for the optimization problems (19a) and (19b) are given by:
( )
1(
)
1 a) 0 ; b) 0 op op hop op op hop h h h hg h h h h g J g g p J g g p M α α α M α α ʹ = ⇔ =− ʹ = ⇔ =− (25)(v) Jhʹ and
J
hʹ
α are Lipschitzians and strictly monotone operators.Proof. We use the definitions (16a,b), the elliptic variational equalities (17) and (18) and the coerciveness (10) and (11), following [10,18,25].
W
We define the operators:
( )
1( )
1 , : such that a) , ) h h h hg h h g W W H H W g p b W g p M M α → =− α =− α . (26) Theorem 4 We have that:(i) Wh and
W
hα are Lipschitzian operators, and Wh (W
hα) is a contraction opera-tor if and only if M is large, that is:2 2
1 1
a) M > , b) M >
α
λ
λ
. (27)(ii) If M verifies the inequalities (27a,b) then the discrete distributional optimal control
op
h
g ∈H (ghαop∈H) is obtained as the unique fixed point of Wh (
W
hα), i.e.:( )
(
)
1 1 , op hop op op op hop op op h hg h h h h h g h h h g p W g g g p W g g M α M α α α α α =− ⇔ = =− ⇔ = . (28)Proof. We use the definitions (26a,b), and the properties (25a,b) and Lemma 2.
W
3
Convergence of the Discrete Distributed Optimal Control
Problems
( )
P
hto
( )
P
and
(
P
hα)
to
( )
P
αwhen
h
→
0
We obtain the following error estimations between the continuous and discrete solutions:
Theorem 6
We suppose the continuous system states and adjoint system states have the regu-larities ,
( )
op r g g u u H α α ∈ Ω and , op( )
r g g p p H α α ∈ Ω(
1<r≤2)
. If M verifies the1, 1, 1 op op hop op hop op r r r h H hg g hg g V V g −g ≤ch − u −u ≤ch− p −p ≤ch − (29) 1, 1, 1 op op hop op hop op r r r h H h g g h g g V V g g ch u u ch p p ch α α α α α α α α α α − − − − ≤ − ≤ − ≤ (30)
where c’s are constants independents of h.
Proof. It is useful to use the restriction α >1 by splitting aαby [21, 24,25]
(
)
(
)
1 1 , , ( 1) a u vα a u vα
uvdγ
Γ = + −∫
(31)but then it can be replaced by
α α
≥
0 for anyα
0>
0
. We follow a similar method tothe one developed in [25] for Neumann boundary optimal control problems by using the elliptic variational equalities (17), (18), (20) and (21), the thesis holds.
W
Remark 2. If M verifies the inequalities (27a,b) we can obtain the convergence in Theorem 6 by using the characterization of the fixed point (28a,b), and the uniqueness of the optimal controls gop∈H and gαop∈H.
Now, we give some estimations for the discrete cost functional
J
hα and Jh.Lemma 7 If M verifies the inequality (27a,b)and the continuous system states and adjoint system states have the regularities , r
( )
g g
u uα ∈H Ω p pg, αg∈Hr
( )
Ω(
1<r≤2)
then we have the following error bonds:( ) ( )
(
)
( )
2 2 2( 1), 2( 1) 2 hop op op op 2 hop op op op r r h h H H M M g g J g J g Ch gα gα J gα α J gα α Ch − − − ≤ − ≤ − ≤ − ≤ (32)( )
( )
( )
( )
2 2 2( 1); 2( 1) 2 hop op op hop 2 hop op op hop r r h h h h H H M M g g J g J g Ch gα gα Jα gα Jα gα Ch − − − ≤ − ≤ − ≤ − ≤ (33)( ) ( )
1,( ) ( )
1 op op op op r r h h h J g J g Ch− J g J g Ch− − ≤ − ≤ (34)( )
( )
1,(
)
( )
1 op op op op r r h h h Jα g J gα Ch− Jα gα J gα α Ch− − ≤ − ≤ (35)where C’s are constants independents of h and α .
Proof. Estimations (32) and (33) follow from the estimations (29), and the equali-ties (similar relationship for
J
and
J
α):(
hop)
( )
op 12 h ghop gop 2H 2 hop op 2HM
J g J g u u g g
α α
( )
op( )
hop 12 hop hop 2 2 hop op 2 h h h g h g H H M J g J g u u g g α α α α α − α = α − α + − α (37)( )
( )
1 , 2 h h g g H g d H h g g H Jα g −Jα g ≤⎜⎛ uα −uα + uα −z ⎞⎟ uα −uα ∀ ∈g H ⎝ ⎠ .W
(38)4
Convergence of the Discrete Optimal Control Problems
(
P
hα)
to
( )
P
hwhen
α
→
+
∞
Theorem 9
We have the following limits:
lim h h lim h h lim op op 0 , 0
op op op op h g hg h g hg h h H V V u u p p g g h α α α α α α→+∞ − =α→+∞ − =α→+∞ − = ∀ > . (39)
Proof. We omit this proof because we prefer to prove the next one with more de-tails.
5
Double Convergence of the Discrete Distributed Optimal
Control Problem
(
P
hα)
to
( )
P
when
( , )
h
α
→
(0,
+
∞
)
For the discrete distributed optimal control problem
(
Phα)
we will now con-sider the double limit( , )
h
α →
(0,
+
∞
)
.Theorem 10
We have the following limits:
( , ) (0,hαlim→ +∞)uh gαhαop−ugop V =( , ) (0,hαlim→ +∞) ph gαhαop−pgop V =( , ) (0,hαlim→ +∞) ghαop−gop H =0 (40)
Proof. From now on we consider that c’s represent positive constants independ-ents simultaneously of h>0 and α >0 (see (31)). We show a sketch of the proof by obtaining the following estimations (for ∀h>0 and ∀α >1):
(
) (
)
1 2 0 1, 0 2, 1 0 3 h V h V h u c uα cα
uα b dγ
c Γ ≤ ≤ −∫
− ≤ (41) 4, 5, 6 op hop op h h g h H H H g c u c g c α α ≤ α ≤ ≤ (42)(
)
(
)
1 2 7, 8, 1 9 hop hop hop hg h g h g V V u c u c u b d c α α αα
αγ
Γ ≤ ≤ −∫
− ≤ (43)(
)
1 2 10, 11, 1 12 hop hop hop hg h g h g V V p c p c p d c α α αα
αγ
Γ ≤ ≤ −∫
≤ . (44)For example, the constant c11is a positive constant independent simultaneously of
0
h> and α >0, and it is given by the following expression:
11 1 1 1 1 1 1 1 1 0 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 d H Q c z M M b M M M q M λ λ λ λλ λ λ λ λ λ λ λ λ λ λ γ λ λ λ λ λλ λ λ λ λ ⎡ ⎛ ⎛ ⎞⎞ ⎛ ⎞⎛ ⎞⎤ = ⎢ ⎜⎜ + ⎜ + + ⎟⎟⎟+ ⎜ + ⎟⎜ + ⎟⎥ ⎝ ⎠ ⎢ ⎝ ⎝ ⎠⎠ ⎝ ⎠ ⎥ ⎣ ⎦ ⎡ ⎛ ⎞⎛ ⎞ ⎛ ⎞⎛ ⎞⎤ + ⎢ ⎜ + ⎟⎜⎜ + + ⎟⎟+ ⎜ + ⎟⎜ + ⎟⎥ ⎝ ⎠ ⎢ ⎝ ⎠⎝ ⎠ ⎝ ⎠ ⎥ ⎣ ⎦ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ + + ⎜ + ⎟+ + ⎜ + ⎟+ ⎜ + ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ 2 1 1 1 1 1 1 M λ λ λ ⎡ ⎡ ⎛ ⎞⎤ ⎛ ⎞⎛ ⎞⎤ ⎢ ⎢ ⎜⎜ ⎟⎟⎟⎥+ ⎜ + ⎟⎜ + ⎟⎥ ⎢ ⎢⎣ ⎝ ⎠⎥⎦ ⎝ ⎠⎝ ⎠⎥ ⎣ ⎦ (45)
Therefore, from the above estimations we have that:
/ in weak as ( , ) (0, ) op h f H gα f H h
α
∃ ∈ ⎯⎯→ → +∞ (46) 1/ in weak ( strong) as ( , ) (0, ) with /
h op h g V u V H h b α α
η
η
α
η
∃ ∈ ⎯⎯→ → +∞ Γ = (47) 1 / in weak ( strong) as ( , ) (0, ) with / 0h op h g V p V H h α α
ξ
ξ
α
ξ
∃ ∈ ⎯⎯→ → +∞ Γ = (48) / in weak as op h h h f H gα f Hα
∃ ∈ ⎯⎯→ →+∞ (49) 1 / in weak (in strong) as with /h op
h V uh gα α h V H h b
η
η
α
η
∃ ∈ ⎯⎯→ →+∞ Γ = (50)
1
/ in weak (in strong) as with / 0
h op h V ph gα α h V H h
ξ
ξ
α
ξ
∃ ∈ ⎯⎯→ →+∞ Γ = (51) / in weak as 0 op h fα H gα fα H h ∃ ∈ ⎯⎯→ → (52) 1/ in weak (in strong) as 0 with /
h op h g V u V H h b α α α α α
η
η
η
∃ ∈ ⎯⎯→ → Γ = (53) 1/ in weak (in strong) as 0 with / 0
h op h g V p V H h α α α α α
ξ
ξ
ξ
∃ ∈ ⎯⎯→ → Γ = (54) * / * in weak as 0 op h f H g f H h ∃ ∈ ⎯⎯→ → (55) * * * 1 / in weak ( strong) as 0 with /hop hg V u V H h b
η
η
η
∃ ∈ ⎯⎯→ → Γ = (56) * * * 1/ in weak ( strong) as 0 with / 0
hop hg
V p V H h
ξ
ξ
ξ
Taking into account the uniqueness of the distributed optimal control problems
(
Phα) ( ) ( )
, Pα , Ph and( )
P , and the uniqueness of the elliptic variational equalities corresponding to their state systems we get, , h hop h hop hop h uhf uhg h phf phg fh g
η
= =ξ
= = = (58) , , op op op f g f g u u p p f g α α α α α α α α α α α αη
= =ξ
= = = (59) * , * , * op op op f g f g u u p p f f gη η
= = =ξ ξ
= = = = = . (60)Now, by using [11] we obtain
lim op 0, lim 0, lim 0
op op
g g
H V V
fα g α u α p
α→+∞ − = α→+∞
η
− = α→+∞ξ
− = (61)and therefore the three double limits (40) hold when
( , )
h
α →
(0,
+
∞
)
.Proof of Theorem 1. It is a consequence of the properties (29), (30), (39), (40) and [10,11].
Remark 3. We note that this double convergence is a novelty with respect to the recent results obtained for a family of discrete Neumann boundary optimal control problems [25].
Acknowledgements
The present work has been partially sponsored by the Projects PIP No 0534 from CONICET - Univ. Austral, Rosario, Argentina, and AFOSR-SOARD Grant FA9550-14-1-0122.
References
1. Azzam, A., Kreyszig, E.: On solutions of elliptic equations satisfying mixed boundary conditions. SIAM J. Math. Anal. 13, 254-262 (1982).
2. Bergounioux, M.:Optimal control of an obstacle problem. Appl. Math. Optim. 36,
147-172 (1997).
3. Brenner, S., Scott, L.R.: The mathematical theory of finite element methods. Springer, New York (2008).
4. Casas, E., Mateos, M.: Uniform convergence of the FEM. Applications to state constrained control problems. Comput. Appl. Math. 21, 67-100 (2002).
5. Casas, E., Mateos, M.: Dirichlet contol problems in smooth and nonsmooth convex plain domains. Control Cybernetics. 40, 931-955 (2011).
6. Casas, E., Raymond, J.P.: Error estimates for the numerical approximation of Dirichlet boundary control for semilinear elliptic equations. SIAM J. Control Optim. 45, 1586-1611 (2006).
8. Deckelnick, K, Günther, A., Hinze, M.: Finite element approximation of ellliptic control problems with constraints on the gradient. Numer. Math. 111, 335-350 (2009).
9. Deckelnick, K., Hinze, M.: Convergence of a finite element approximation to a state-constrained ellliptic control problem. SIAM J. Numer. Anal. 45, 1937-1953 (2007). 10. Gariboldi, C.M., Tarzia, D.A.: Convergence of distributed optimal controls on the internal
energy in mixed elliptic problems when the heat transfer coefficient goes to infinity. Appl. Math. Optim. 47, 213-230 (2003).
11. Gariboldi, C.M., Tarzia, D.A.: A new proof of the convergence of the distributed optimal controls on the internal energy in mixed elliptic problems. MAT – Serie A. 7, 31-42 (2004).
12. Haller-Dintelmann, R., Meyer, C., Rehberg, J., Schiela, A.: Hölder continuity and optimal control for nonsmooth elliptic problems. Appl. Math. Optim. 60, 397-428 (2009).
13. Hintermüller, M., Hinze, M.: Moreau-Yosida regularization in state constrained ellliptic control problems: Error estimates and parameter adjustement. SIAM J. Numer. Anal. 47, 1666-1683 (2009).
14. Hinze, M.: A variational discretization concept in control constrained optimization: The linear-quadratic case. Comput. Optim. Appl. 30, 45-61 (2005).
15. Hinze, M., Matthes, U.: A note on variational dicretization of elliptic Nuemann boundary control. Control Cybernetics. 38, 577-591 (2009).
16. Kinderlehrer, D., Stampacchia, G.: An introduction to variational inequalities and their ap-plications. SIAM, Philadelphia (2000).
17. Lanzani, L., Capogna, L., Brown, R.M.: The mixed problem in Lpfor some two-dimensional Lipschitz domain. Math. Annalen.342,91-124(2008).
18. Lions, J.L. : Contrôle optimal des systèmes gouvernés par des équations aux dérivées par-tielles. Dunod, Paris (1968).
19. Mermri, E.B., Han, W.: Numerical approximation of a unilateral obstacle problem. J. Op-tim. Th. Appl. 153, 177-194 (2012).
20. Shamir, E.: Regularization of mixed second order elliptic problems. Israel J. Math. 6, 150-168 (1968).
21. Tabacman, E.D., Tarzia, D.A.: Sufficient and/or necessary condition for the heat transfer coefficient on Γ1and the heat flux on Γ2 to obtain a steady-state two-phase Stefan prob-lem. J. Diff. Eq. 77, 16-37 (1989).
22. Tarzia, D.A.: An inequality for the constant heat flux to obtain a steady-state two-phase Stefan problem. Eng. Anal. 5, 177-181 (1988).
23. Tarzia, D.A.: Numerical analysis for the heat flux in a mixed elliptic problem to obtain a discrete steady-state two-phase Stefan problem. SIAM J. Numer. Anal. 33, 1257-1265 (1996).
24. Tarzia, D.A.: Numerical analysis of a mixed elliptic problem with flux and convective boundary conditions to obtain a discrete solution of non-constant sign. Numer. Meth. PDE. 15, 355-369 (1999).
25. Tarzia, D.A.: A commutative diagram among discrete and continuous boundary optimal control problems. Adv. Diff. Eq. Control Processes. 14, 23-54 (2014).
26. Tröltzsch, F.: Optimal control of partial differential equations. Theory, methods and appli-cations. American Mathematical Society. Providence (2010).
27. Yan, M., Chang, L., Yan, N.: Finite element method for constrained optimal control prob-lems governed by nonlinear elliptic PDEs. Math. Control Related Fields. 2, 183-194 (2012).
28. Ye, Y., Chan, C.K., Lee, H.W.J.: The existence results for obstacle optimal control prob-lems. Appl. Math. Comput. 214, 451-456 (2009).