Abstract
WANG, QIONG. Robust Estimation via Measurement Error Modeling. (Under the direction of Dr. Leonard A. Stefanski and Dr. Marc G. Genton.)
We introduce a new method to robustifying inference that can be applied in any situation where a parametric likelihood is available. The key feature is that data from the postulated parametric models are assumed to be measured with error where
the measurement error distribution is chosen to produce the occasional gross errors found in data. We show that the tails of the error-contamination model control the
properties (boundedness, redescendingness) of the resulting influence functions, with heavier tails in the error contamination model producing more robust estimators. In the application to location-scale models with independent and identically distributed
data, the resulting analytically-intractable likelihoods are approximated via Monte Carlo integration. In the application to time series models, we propose a Bayesian approach to the robust estimation of time series parameters. We use Markov Chain
ROBUST ESTIMATION VIA MEASUREMENT ERROR MODELING
by
QIONG WANG
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
STATISTICS
Raleigh
2005
APPROVED BY:
Dr. Leonard A. Stefanski Dr. Marc G. Genton
Chair of Advisory Committee CO-Chair of Advisory Committee
Dr. Dennis D. Boos Dr. David A. Dickey
Biography
Qiong Wang was born on December 4th, 1978 to Boren Wang and Huizhi Zhu in Kaihua, China. She graduated from No. 1 High School in Changzhou in 1996.
She received a Bachelor of Sciences degree in Applied Mathematics from Southeast University in Nanjing, China in 2000, and a Master’s of Sciences degree in Probability and Mathematical Statistics in 2002. She then joined the graduate program in the
Acknowledgements
Firstly, I would like to express my deepest appreciation to my wonderful advisors Dr. Leonard Stefanski and Dr. Marc Genton for their guidance, training and support
during this research. I feel so fortunate to have worked with them and learned from them, and I have great admiration for their intellect and work ethic.
I am grateful to the valuable suggestions and comments of Dr. Dennis Boos to
this work. My thanks also go to Dr. Bibhuti Bhattacharyya, Dr. David Dickey, and Dr. Sujit Ghosh for their warm help with various problems in my research.
I also want to thank my dear friends, Dazhe Wang, Liyun Ma, Guanjun Jiang, Xiaoni Liu, Xiang Guo, Jiajun Liu, Guozhi Gao, Huiqin Liu, Shengmao Chang, Xi Chen and Joe Boyer for their support and encouragement during these three years.
They make me feel that life is so beautiful.
Contents
List of Figures vii
List of Tables viii
1 Introduction and Overview 1
1.1 Motivation . . . 1
1.2 Robust Statistics . . . 2
1.3 Measurement Error Models . . . 4
1.4 Robust Likelihood Approach via Measurement Error Modeling . . . . 5
1.5 Research Overview . . . 6
2 Robust Estimation for Location-Scale Models 8
2.1 Introduction . . . 8
2.2 Robust Properties from Error-Contamination Models . . . 10 2.2.1 Influence Function Properties . . . 11
2.2.2 Location-Scale Model Tuning Parameter Determination . . . . 16
2.3 Simulation Study . . . 24
2.3.1 Performance for Small B . . . 24
2.3.2 Comparison with Huber’s Proposal 2 . . . 25
2.3.3 Adaptivity of the t-Adaptive Approach . . . 32
3 Bayesian Inference for Robust Error Contamination Models with Application to Time Series Data 35 3.1 Introduction . . . 35
3.2 Robust Error Contamination Models with Application to Correlated Data . . . 37
3.2.1 Application to Correlated Data . . . 37
3.2.2 Types of Outliers for Time Series Data . . . 41
3.3 Bayesian Inference for Robust Error Contamination Models . . . 42
3.3.1 Bayesian Approach . . . 42
3.3.2 Implementation of Bayesian Inference via MCMC . . . 44
3.4 Simulation Study . . . 45
3.4.1 Performance of Bayesian Estimators on Contaminated Data . 45 3.4.2 Bayesian Inference of Gross Errors . . . 60
3.4.3 Performance with Large Sample Size . . . 62
3.5 Examples . . . 63
3.5.1 Example I: Austrian Interest Rates . . . 63
4 Conclusion 70
4.1 Summary . . . 70
4.2 Future Research . . . 72
A 73 A.1 Invariance Proof . . . 73
A.2 Calculus for Equation (2.11) . . . 74
A.3 Calculus for the Score Function under Non-invariant Gaussian Conta-mination Model . . . 75
A.4 Calculus for Equation (2.13) . . . 76
A.5 Calculus for Equation (2.14) . . . 77
A.6 Calculus for Equation (2.16) . . . 77
A.7 IF Properties . . . 78
A.8 Score Function . . . 79
A.9 Proof for Equation (3.4) . . . 83
A.10 Calculus for Equation (3.7) . . . 85
A.11 Proof That the Score Function of σ is Unbounded in the Case of Exponential-like Tails . . . 87
List of Figures
2.1 The score function under non-invariant error models . . . 22 2.2 The score function under invariant error models when τ and are
chosen to achieve the efficiency 95%. . . 23 2.3 Performance of normal contamination estimators with small B . . . . 26 2.4 Performance of Laplace contamination estimators with small B . . . 27
2.5 Performance of Cauchy contamination estimators with small B . . . . 28 2.6 Boxplot of estimated degrees of freedom versus true degrees of freedom
for the t-adaptive estimators. . . 34
3.1 Boxplot of ˆα1 for AR(1) model withα1 = 0.5 and 10% contamination. 52 3.2 The Cauchy BMEM-estimates of the gross errors against the true
val-ues for the AR(1) model with α1 = 0 and 10% contamination (κ= 5). 61 3.3 Monthly interest rates of an Austrian bank during 91 months. . . 65 3.4 Saving rates in the United States from the first quarter of 1955 to the
List of Tables
2.1 Normal, Laplace, and Cauchy contamination model tuning parameters
for 85%, 90% and 95% efficiency at the normal location-scale model. 18
2.2 Estimated efficiencies relative to Huber’s Proposal 2 of location esti-mators. . . 29
2.3 Estimated efficiencies relative to Huber’s Proposal 2 of scale estimators. 30
2.4 Estimated efficiencies oft-adaptive estimators relative to Huber’s
Pro-posal 2 . . . 33
3.1 Monte Carlo average and mean squared errors of posterior mean of θ when data were generated from AR(1) with α1 =−0.5. . . 47
3.2 Monte Carlo average and mean squared errors of posterior mean of θ when data were generated from AR(1) with α1 = 0. . . 48
3.3 Monte Carlo average and mean squared errors of posterior mean of θ when data were generated from AR(1) with α1 = 0.25. . . 49
3.5 Monte Carlo average and mean squared errors of posterior mean of θ
when data were generated from AR(1) with α1 = 0.75. . . 51 3.6 Monte Carlo average and mean squared errors of posterior mean of θ
when data were generated from AR(2) with α1 = 0.6 and α1 = 0.3. . 53 3.7 Monte Carlo average and mean squared errors of posterior mean of θ
when data were generated from AR(2) with α1 =−0.6 and α1 = 0.3. 54 3.8 Monte Carlo average and mean squared errors of posterior mean of θ
when data were generated from AR(2) with α1 = 0.3 and α1 =−0.6. 55 3.9 Monte Carlo average and mean squared errors of posterior mean of θ
when data were generated from AR(2) with α1 =−0.3 and α1 =−0.6. 56 3.10 Monte Carlo average and mean squared errors of posterior mean of θ
when data were generated from MA(1) withβ1 = 0.5. . . 57 3.11 Monte Carlo average and mean squared errors of posterior mean of θ
when data were generated from MA(1) withβ1 = 0.8. . . 58 3.12 Correlation of true value and BMEM-estimates of the gross errors. . . 60 3.13 Monte Carlo average of posterior mean of θ for the Cauchy
BM-estimator when the data were generated from AR(1) with different
sample sizes. . . 62 3.14 Parameter estimates obtained by fitting an AR(1) model to the data
of monthly interest rate. . . 64
A.1 Robustness comparison with Huber’s Proposal 2 based on the gross
Chapter 1
Introduction and Overview
1.1
Motivation
Modern robust statistics has focused most of its attention on problems such as the estimation of location and scale in univariate and multivariate populations with nat-ural extensions to regression and autoregressive situations. Little progress has been
made in the more challenging arenas of spatial data and general stochastic processes except for certain specific techniques such as Genton’s (1998) highly-robust variogram estimator. Parametric models and likelihood methods abound for these dependent
data situations, but they are often sensitive to outliers. What is missing is a general approach to robustifying likelihood methods that is applicable in settings with just one realization, where empirical densities and distribution functions do not exist.
connected to measurement error modeling (Stefanski, 2000; Carrol et al., 1995) and
reduces to well-known contaminated normal likelihoods in certain cases. The key idea is to model the observations with a suitable structural measurement error model for the unobservable error-free data and the observed error-contaminated data. In
the usual measurement error modeling application, the errors are typically assumed to be normally distributed in order to best model the errors produced by in-control measurement methods (Fuller, 1987; Carroll et al., 1995; Cheng and Van Ness, 1999).
In the application to robustness, we alter the assumptions on the errors to reflect the type of data contamination for which robust procedures are designed.
This chapter is organized as follows. In Section 2 we briefly review the idea of robustness and the key tools for measuring robustness. Section 3 contains a brief introduction to measurement error models. Section 4 introduces the basic idea of
this new robust estimation method based on measurement error modeling. Section 5 summarizes the two main chapters and the last chapter.
1.2
Robust Statistics
Robustness means lack of sensitivity to small departures from the idealized assump-tions, where “small” indicates either moderate deviations for all data points or large
The most popular tools for measuring robustness are the influence function and
the breakdown point (Huber 2004). The former measures local robustness and the latter measures global robustness.
Let χn denote a sample with n observations and Tn(χn) be a statistic given χn.
T is called a statistical functional if Tn(χn) −−−→n→∞ T(F), where F is a cumulative distribution function. Consider an-contaminated distribution of F, F = (1−)F+
δx, whereδx is the point mass distribution atx, then the influence function is defined
as
IF(x;T, F) = lim
→0
T(F)−T(F)
.
Heuristically, it is the rate at which T(F) changes due to the contamination at the point x. If the influence function is small, then contamination at x will not
signifi-cantly change the statistical functional. Due to this interpretation, it is desirable to have a bounded or redescending influence function. The robustness property of the influence function is quantified by the gross error sensitivity:
γ∗(T;F) = sup
x |IF(x;T, F)|,
which measures the fastest rate at which an outlier can alter the value of the statistical functional. Any statistical functional with finiteγ∗ is called B-robust.
The breakdown point provides a framework within which it is possible to examine
replaced with arbitrary values. The maximum bias underm-contamination is defined
as:
B(m;Tn, χn) = sup|Tn(χn,m)−Tn(χn)|,
where supremum is taken over all possible values of themcontamination points. Then
the finite sample breakdown point is defined as the minimum amount of contamination to cause breakdown of the statistic:
∗(Tn;χn) = inf{m :B(m;T, χn) = ∞}.
One intuitive interpretation of the breakdown point is the proportion of bad data a statistic can tolerate before taking on arbitrary or meaningless values.
1.3
Measurement Error Models
The classical measurement error model (Stefanski, 2000) assumes that
Wi =Xi+Ui, i= 1, . . . , n,
whereX1, . . . , Xn are the variables of interest, which are statistically meaningful but cannot be observed directly,U1, . . . , Unrepresent measurement errors, andW1, . . . , Wn
are the observable measurements of, or substitutes for, X1, . . . , Xn. The problem is to make inference according to the model defined in terms of the unobservable
X1, . . . , Xn, given the data on W1, . . . , Wn.
are regarded as a sequence of unknown constants, whereas in a structural
measure-ment error modelX1, . . . , Xn are regarded as random variables.
1.4
Robust Likelihood Approach via Measurement
Error Modeling
The idea of the robust likelihood approach is to model the observation with a suitable structural measurement error model. In this formulation the unobservable error-free
data X1, . . . , Xn, and the observed error-contaminated data are related as
Wi =Xi+τ Zi, i= 1, . . . , n, (1.1)
where Z1, . . . , Zn are independent and identically distributed with common distribu-tion G(z) and independent of X1, . . . , Xn. We have in mind error models that result in negligible errors much of the time, but produce occasional large outlying values. Thus we assume that the central modelf(x;θ) holds except for a fraction of the data that are contaminated by random errors. We accomplish this by assuming G(z) is
a mixture of a point mass at zero and a standard density in proportions 1− and
respectively
G(z) = (1−)I(0≤z) +
z
−∞
g(x)dx, (1.2)
whereg is a standardized probability density function, e.g., normal, Laplace, Cauchy.
(1.1) the joint density of W1, . . . , Wn is given by
fW(w|θ, , τ) =
· · ·
f(w1 −τ z1, . . . , wn−τ zn;θ)
n
i=1
G(dzi) (1.3)
= E{f(w1−τ Z1, . . . , wn−τ Zn;θ)}.
Note that we list the contamination parameters and τ as parameters in the model. In some cases these will be identifiable and the potential exists for estimating them
from the observed data. However, often they will be specified as tuning parameters and chosen to obtain a specified level of efficiency at a central, non-contaminated model.
1.5
Research Overview
In Chapter 2 we emphasize the independent and identically distributed case, and location-scale models in particular. There are two advantages to focusing on location
and scale estimation. First, robust location and scale estimation has been thoroughly studied, and hence good benchmarks are available with which to compare estimators derived from the new approach. Second, certain theoretical results can be derived
relatively simply for location and scale estimation. Our objective with Chapter 2 is to show that the measurement error approach to robustifying estimation is competitive with established robust methods. In the case that data are independent and
function property with different types of tail behavior for the error distribution g in
(1.2). We focus on three standard distributions: normal, Laplace and Cauchy. The main result is that the heavier tails in the error contamination distribution produces better influence function property. In study of location-scale models with
indepen-dent and iindepen-dentically distributed data, we use the common approach of tuning the estimating equations derived from the robust error contamination model to achieve consistency and desired efficiency at the non-contaminated normal model.
Ultimately, our intention is to robustify inference in statistical models that are not easily robustified using standard approaches, such as time series models. It is such hard-to-robustify models that piqued our interest in the error modeling approach, and
this is studied in Chapter 3. In the case that data are not independent, Monte Carlo integration can be too variable to approximate the multivariate marginal likelihood (1.3). We propose a Bayesian approach to deal with the computing problem. The
Bayesian inference is carried out using Markov Chain Monte Carlo techniques. By taking the Bayesian perspective, we obtain the posterior distribution for errors and parameters of interest, which contains all the relevant information given the observed
data. This Bayesian approach not only provides robust estimation for the parameters of interest but also achieves outlier diagnostics. The identification of outliers is based on the posterior distribution. The Cauchy error model turns out to perform best in
both robust estimation and outlier detection.
Chapter 2
Robust Estimation for
Location-Scale Models
2.1
Introduction
We have introduced the error contamination model (1.1) and the resulting mar-ginal likelihood (1.3) in the first chapter. In particular models, there may be clever approaches for evaluating the integral in (1.3) and maximizing the likelihood L =
fW(W|θ, , τ), but in general this will be a nonstandard computational problem. For
the particular case of independent and identically distributed observationsW1, . . . , Wn, the marginal density (1.3) simplifies to
fW(w|θ, , τ) =
n
i=1
f(wi−τ zi;θ)G(dzi) =
n
i=1
where now f(x;θ) denotes the marginal density of Xi, i = 1, . . . , n. Monte Carlo
integration provides a straightforward and generally applicable solution to the com-putational problem resulting in
fW(w|θ, , τ) =
n i=1 1 B B b=1
f(wi−τ Zb,i∗ ;θ), (2.2)
where theZb,i∗ are independently and identically distributed with common distribution
G.
For location-scale models with θ= (µ, σ), (2.1) becomes
fW(w|µ, σ, , τ) =
n i=1 1 σf
wi−τ zi−µ σ
G(dzi)
= n i=1 E 1 σf
wi−τ Zi−µ σ
,
where nowf(x) is the kernel of the location-scale family for the marginal density ofXi, i.e., fX(x;µ, σ) =σ−1f((x−µ)/σ). In our study of robust location-scale estimation we adopt the common approach of setting the tuning parameters to achieve desired
levels of efficiency at a central model, and hence we no longer listandτas parameters in the model. In this case the location-scale model version of (2.2) is
fW(w|µ, σ) =
n i=1 1 B B b=1 1 σf
wi−τ Zb,i−µ σ
B−→→∞
fW(w|µ, σ). (2.3)
Inspection of the limit likelihood L=fW(W|µ, σ) (or the Monte Carlo version L =
fW(W|µ, σ)) reveals a problem that does not arise whenτ is estimated along with the
non-invariant error-contamination model (1.1) to
Wi =Xi+τ σZi, i= 1, . . . , n, (2.4)
which we call the invariant error model (invariance is proved in Appendix A.1). The
relevant versions of equations (2.1)-(2.3) for the invariant error model are obtained by replacing τ with στ, and throughout the chapter we also work with the invariant version of (2.3),
fW(w|µ, σ) =
n
i=1
1
B
B
b=1
1
σf
wi−τ σZb,i−µ σ
. (2.5)
When the kernel f of the location-scale family and the error contamination dis-tribution are both symmetric around 0, estimates of µ derived from the likelihoods
based on (2.3) and (2.5) will be consistent. However, scale estimates will not be con-sistent in general, and we adopt the accepted strategy of adjusting the scale estimates to ensure consistency at the non-contaminated central model, which we take to be
normal, i.e., f is standard Gaussian with no error contamination. We discuss the calculation of the scale adjustment factor in the next section. For convenience, we name the new robust estimator derived from (2.3) or (2.5) as MEM-estimator.
2.2
Robust Properties from Error-Contamination
Models
Through-out we assume that the errors Z1, . . . , Zn are from the gross error model
Z =T Q, (2.6)
where T is distributed as Bernoulli() and Q has a symmetric standardized distri-bution. When the distribution of Q has a finite second moment, we standardize in
the usual fashion (to mean 0 and variance 1). For distributions without the requi-site moments we standardize to median 0, with scale such that Pr(−1 < Q ≤ 1) = Φ(1)−Φ(−1) ≈ 0.6827, where Φ is the standard Gaussian cumulative distribution
function. Results are presented for the common cases where Q is normal, Laplace and Cauchy.
2.2.1
Influence Function Properties
Certain of the results in this section hold for general models with independent and identically distributed data, i.e, they are not specific to location-scale models, and we present them accordingly. We make it clear where results are specific to location-scale
models.
The contaminated density is given by
h(u;θ) =
f(u−τθz;θ) G(dz)
= (1−)f(u;θ) +
f(t;θ)g((u−t)/τθ)/τθ dt, (2.7)
is denoted by
ψ(u;θ, , τ) = ∂
∂θlnh(u;θ). (2.8)
We write ψ(u;θ, , τ) to emphasize the dependence of the score on the tuning para-meters even though θ is the only parameter to be estimated.
Non-invariant Error Model
Our first results for the non-invariant error model are not specific to location-scale
models and we derive them for more general models. In this case the score function (2.8) reduces to
ψ(u;θ, , τ) = ∂
∂θlnh(u;θ)
= (1−) ˙f(u;θ) +(∂/∂θ) f(t;θ)g((u−t)/τ)/τ dt (1−)f(u;θ) + f(t;θ)g((u−t)/τ)/τ dt ,
where ˙f(u;θ) = (∂/∂θ)f(u;θ). The robustness properties (bounded, redescending)
of ψ(u;θ, , τ) can be deduced from the expression above under certain regularity conditions and assumptions on the tail behavior ofg. First re-express ψ(u;θ, , τ) as
ψ(u;θ, , τ) = (1−)τ ˙
f(u;θ)/g(u/τ) +(∂/∂θ) f(t;θ)g((u−t)/τ)/g(u/τ) dt
(1−)τ f(u;θ)/g(u/τ) + f(t;θ)g((u−t)/τ)/g(u/τ) dt .
Robustness is achieved by choosing an error contamination model with heavier tails than the assumed parametric model. For such choices of g it will generally be the case (and can usually be arranged by suitable choice of g) that
lim |u|→∞
f(u;θ)
g(u/τ) = 0 and |ulim|→∞ ˙
f(u;θ)
which we now assume. It follows that the behavior of ψ(u;θ, , τ) for large u is
determined by the behavior of g((u − t)/τ)/g(u/τ) for large u, which in turn is dictated by the tail behavior of g. Two cases are of interest: polynomial-like tail behavior,
lim |u|→∞
g(u+b)
g(u) = 1; (2.9)
and exponential-like tail behavior,
lim
u→∞
g(u+b)
g(u) = exp(c1b), u→−∞lim
g(u+b)
g(u) = exp(c2b), (2.10)
for some constants c1 and c2.
For the case of polynomial-like tails,
lim |u|→∞
f(t;θ)g((u−t)/τ)
g(u/τ) dt= 1
and lim
|u|→∞
∂ ∂θ
f(t;θ)g((u−t)/τ)
g(u/τ) dt = 0, (2.11)
assuming that limits, differentiation, and integration are interchangeable. It follows
that when g has polynomial-like tails, lim|u|→∞ψ(u;θ, , τ) = 0, i.e., ψ(u;θ, , τ) is redescending. So the non-invariant, Cauchy error contamination model yields re-descending influence curves.
For the case of exponential-like tails,
lim
u→∞
f(t;θ)g((u−t)/τ)
g(u/τ) dt =
f(t;θ) exp(−c1t/τ) dt,
and lim
u→−∞
f(t;θ)g((u−t)/τ)
g(u/τ) dt =
f(t;θ) exp(−c2t/τ) dt,
the limits can be interchanged with differentiation, then
lim
u→∞ψ(u;θ, , τ) =
∂
∂θ ln{mf(−c1/τ;θ)},
and
lim
u→−∞ψ(u;θ, , τ) =
∂
∂θ ln{mf(−c2/τ;θ)},
where mf(·;θ) is the moment generating function of f(·;θ), assumed to exist. So
the non-invariant, Laplace error contamination model results in bounded influence curves.
The normal error contamination model, i.e., g is standard normal, has neither polynomial-like nor exponential-like tails, and the results above do not apply to it. In this case the tail behavior of the score function depends on the underlying model.
When the underlying true-data model in (2.3) and (2.5) is a Gaussian location-scale model, and g in (2.9) is standard normal, standard calculus arguments (in Appendix A.3) show that the score function for location diverges linearly with asymptotic slope
= 1/(σ2+τ2); and the score function for scale diverges quadratically with coefficient
σ/(σ2+τ2)2. Thus the normal contamination model does not result in qualitatively robust estimation. This finding is consistent with the results in Gleason (1993) who
argues that the contaminated normal is not truly heavy tailed.
Invariant Error Model
models is that in the latter the distribution of the added errors depends on the model
parameter σ. This does not affect the tail behavior of the estimating equation for µ, but it gives rise to different tail behavior for the estimating equation for σ. In this case theσ component of the score function is
ψσ(u;θ, , τ) = (∂/∂σ) lnh(u;θ)
= (∂/∂σ){f(t;θ)g((u−t)/τ σ)/τ σ}/g(u/τ σ)/τ σ dt
f(t;θ)g((u−t)/τ σ)/g(u/τ σ) dt . (2.12)
In the appendix (A.4 and A.5) we show that for the case of exponential-like tails,
lim
|u|→∞ψσ(u;θ, , τ) =∞; (2.13)
and that for the case of symmetric polynomial-like tails,
lim
|u|→∞ψσ(u;θ, , τ) =
p−1
σ , (2.14)
where p is the power of the polynomial decreasing tails, i.e., g(u) ∼ u−p. Thus in
contrast to the non-invariant error model results, exponential-like tails for g yield unbounded influence curves, and polynomial-like tailed distributions forg do not give rise to redescending (to 0) influence curves for scale estimation. It is possible to
obtain redescending estimating equations for scale using the error-model approach, but doing so necessitates using nonstandard error distributions with extremely heavy tails. For example, suppose that we start with a random variable T that is Cauchy
distributed with density 1/{π(1 +t2)}, and for a fixed constant k >0 define,
U =
⎧ ⎨ ⎩
eT1k −1 T ≥0,
Then the density function ofU is symmetric around 0, with
g(u) = 1
π(1 + [log(1 +u)]2k)
[log(1 +u)]k−1
1 +u , u≥0. (2.15)
The tails of this density decrease extremely slowly and thus we call it a super-heavy
tailed distribution. If the density in (2.15) is used to construct the score in (2.12), then it is shown in the appendix (A.6) that
lim
|u|→∞ψσ(u;θ, , τ) = 0. (2.16)
Breakdown Point
The influence function is a measure of local robustness, while breakdown point mea-sures global robustness when the sample has more than one outlier. We have intro-duced the definition of the finite sample breakdown point in Chapter 1. Tyler (1994)
presents some general results of the finite sample breakdown point in simultaneous estimation of location and scale parameters. For the normal and Laplace invariant error model, the theoretical score functions are unbounded for estimators of scale,
which leads to the finite sample breakdown point 1/n. The Cauchy invariant error model achieves the optimal finite sample breakdown point n/2/n.
2.2.2
Location-Scale Model Tuning Parameter
Determina-tion
ψ(w;µ, σ, , τ) denote the two-dimensional contaminated error model score function.
The system of equations in (µ, σ) ∞
−∞ψ
(x;µ, σ, , τ) 1
σ0φ((x−µ0)/σ0) dx=
⎛ ⎝0
0 ⎞ ⎠,
has solutionµ=µ0,σ=c(, τ, σ0)σ0; where for the invariant error modelc(, τ, σ0) =
c(, τ) independent of σ0; but for the non-invariant modelc(, τ, σ0) depends on σ0 in general. In order to ensure consistency at the N(µ, σ2) model, scale estimates derived from the non-invariant likelihood must be divided by c(, τ, σ) whereas estimates
derived from the invariant error model likelihood must be divided by c(, τ). The former correction factor depends on σ and thus is not feasible unless a two-step procedure is implemented. However, the correction factor for the invariant error
model does not depend on unknown parameters and need only be calculated once for a given (, τ).
Using numerical integration to evaluate the relevant likelihoods and asymptotic covariance matrices, we determined the correction factors c(, τ, σ) and c(, τ) for N(µ, σ2) data with µ= 0 and σ = 1, and then determined the asymptotic variances of the consistent estimators. Finally, we searched over values of and τ to find pairs that result in specified target asymptotic efficiencies for both µ and σ. It was not possible to achieve the specified target efficiencies (85%, 90% and 95%)
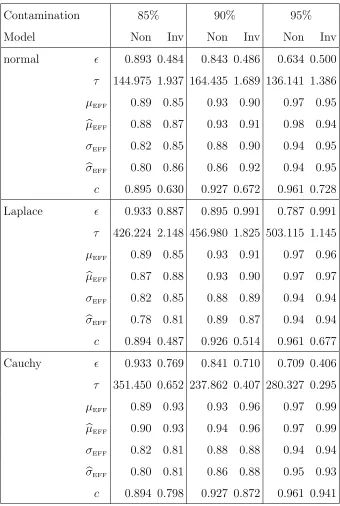
Table 2.1: Normal, Laplace, and Cauchy contamination model tuning parameters for 85%, 90% and 95% efficiency at the normal location-scale model.
Contamination 85% 90% 95%
Model Non Inv Non Inv Non Inv
normal 0.893 0.484 0.843 0.486 0.634 0.500
τ 144.975 1.937 164.435 1.689 136.141 1.386
µEFF 0.89 0.85 0.93 0.90 0.97 0.95
µEFF 0.88 0.87 0.93 0.91 0.98 0.94
σEFF 0.82 0.85 0.88 0.90 0.94 0.95
σEFF 0.80 0.86 0.86 0.92 0.94 0.95
c 0.895 0.630 0.927 0.672 0.961 0.728 Laplace 0.933 0.887 0.895 0.991 0.787 0.991
τ 426.224 2.148 456.980 1.825 503.115 1.145
µEFF 0.89 0.85 0.93 0.91 0.97 0.96
µEFF 0.87 0.88 0.93 0.90 0.97 0.97
σEFF 0.82 0.85 0.88 0.89 0.94 0.94
σEFF 0.78 0.81 0.89 0.87 0.94 0.94
c 0.894 0.487 0.926 0.514 0.961 0.677 Cauchy 0.933 0.769 0.841 0.710 0.709 0.406
τ 351.450 0.652 237.862 0.407 280.327 0.295
µEFF 0.89 0.93 0.93 0.96 0.97 0.99
µEFF 0.90 0.93 0.94 0.96 0.97 0.99
σEFF 0.82 0.81 0.88 0.88 0.94 0.94
σEFF 0.80 0.81 0.86 0.88 0.95 0.93
Table 2.1 continued. Table entries: Non, non-invariant error model; Inv, invariant error
model; , contaminating fraction; τ, error contamination scale; µEFF, location efficiency;
µEFF, Monte Carlo location efficiency; σEFF, scale efficiency; σEFF, Monte Carlo scale
effi-ciency; c, scale adjustment for consistency at normal model. Standard errors for Monte Carlo efficiency ranged from 0.004 to 0.018 averaging approximately 0.01.
may not be accurately determined, but the computed values should yield efficiencies
close to the optimal. Rather than undertake a detailed assessment of the numerical methods used to determine the tuning parameters we designed a simulation study to assess the actual efficiencies of the computed tuning parameters. The simulation
approach has the additional advantage of allowing us to assess efficiency when the Monte Carlo likelihood is used for estimation. In the simulation study 2,500 N(0,1) data sets of sample sizen = 200 were generated and analyzed using the Monte Carlo
likelihood versions of the estimators (B = 800) for the various methods.
Table 2.1 displays values of , τ and the correction factors (c in the table) and the realized efficiencies associated with each indicated target efficiencies for both the non-invariant and invariant robust likelihoods. The agreement between the Monte
Carlo estimated and theoretical efficiencies is generally good, supporting the claim that the calculated tuning parameters result in the nominal efficiencies as advertised.
The large contamination proportions () and large contamination scales (τ) in Table 2.1, especially for the non-invariant cases, were unexpected. When the
have efficiencies less than 100% significantly, the heavy-tailed component must be
sub-stantial. The especially large contaminating scales for the non-invariant estimators are such that the resulting score functions are similar regardless of the contaminating distribution, as shown in the next section.
Score Function Characteristics
Score functions,ψ(u;µ, σ), for location and scale from the three non-invariant error-contaminated models are plotted in Figure 2.1. The baseline model is N(µ, σ2) with
µ = 0 and σ2 = 1. Plots (a) and (c) display the influence functions for location and scale respectively for the three types of contaminated models (normal, Laplace, Cauchy) using and τ from Table 2.1 corresponding to 95% efficiency. The three score functions are overlaid in 1(a) and 1(c).
As evident in the graph the three score functions are indistinguishable over the
range of u plotted. Recall that the theory indicates that the score functions are unbounded for the normal contamination model, bounded for the Laplace contami-nation, and redescending for Cauchy contamination. The fact that all of the curves
appear to redescend to 0 is an artifact of the large values of and τ in Table 2.1. For example, the location curve for the normal model has tails that diverge linearly with slope equal to 1/(1 +τ2) = 1/(1 + 136.1412)≈.000054.
contaminated with a N(0, τ2) error. That these are both unbounded is a conse-quence of the light tails of the normal contamination model. The double-dashed lines display the influence curves for the model contaminated with Laplace error,
g(u) = exp(−√2|u|)/√2. This error model has exponential tails with c1 = −1 and
c2 = 1. Thus, withθ = (µ, σ),
lim
u→±∞ψ(u;µ, σ) =
∂ ∂(µ, σ)
√ 2µ
τ +
σ2 τ2
=
± √
2
τ ,
2σ τ2
T
.
The dashed lines are the influence curves for the model contaminated with Cauchy er-ror,g(u) ={cπ(1+u2/c2)}−1, where c=0.544267. The Cauchy density has polynomial tails and thus the influence functions redescend to 0.
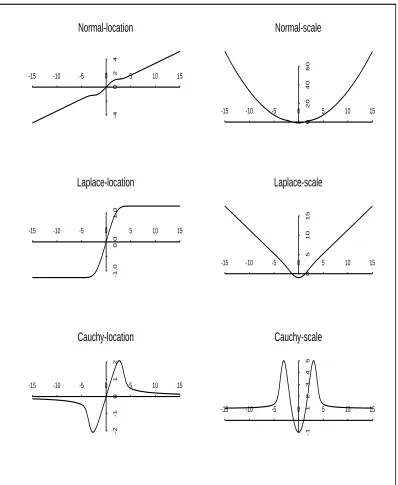
Figure 2 displays ψ(u;µ, σ) for the invariant case whenτ and are from Table 2.1
for 95% efficiency. The theoretical properties of the invariant score functions are read-ily observed from the graphs. The noteworthy features are the unboundedness of the score functions for the normal (location and scale) and Laplace (scale) contamination
models, and the non-redescending of the Cauchy (scale).
2.2.3
t
-adaptive Error Contamination Models
We have shown that robustness of the MEM-estimators is completely determined by the tail behavior of the specified error-contamination distribution. In practice,
Figure 2.1: The score function under non-invariant error models
-15 -10 -5 0 5 10 15
-2
-1
0
1
2
(a)
-15 -10 -5 0 5 10 15
-3
-2
-1
0
1
2
3
(b)
-15 -10 -5 0 5 10 15
-1
0
1
2
3
4
(c)
-15 -10 -5 0 5 10 15
-2
0
2
4
6
(d)
ψ(u;µ, σ) for the non-invariant case: (a) & (c) for location and scale of a normal distribution contaminated by the three types of distributions (normal, Laplace, Cauchy) when τ and are chosen to achieve the efficiency 95%. (b) & (d) use τ = 2, = 0.05: the solid lines for normal error, the double-dashed lines for Laplace error, the dashed lines for Cauchy error.
Figure 2.2: The score function under invariant error models whenτ and are chosen to achieve the efficiency 95%.
-15 -10 -5 0 5 10 15
-4
0
2
4
Normal-location
-15 -10 -5 0 5 10 15
02
0
4
0
6
0
Normal-scale
-15 -10 -5 0 5 10 15
-1.0
0.0
1.0
Laplace-location
-15 -10 -5 0 5 10 15
0
5
10
15
Laplace-scale
-15 -10 -5 0 5 10 15
-2
-1
0
1
2
Cauchy-location
-15 -10 -5 0 5 10 15
-1
12
34
5
by maximizing the likelihood with respect toµ, σ and ν.
As ν increases, the t distribution approaches a normal distribution. For ν > 30, the differences are negligible. For eachν = 1, . . . ,30, after standardization, the tuning parameters (, τ, and correction factor) associated with the desired target efficiency
are calculated and lead to the corresponding estimates ˆµν and ˆσν. The final estimates (ˆν, ˆµ, ˆσ) is the one of the thirty sets of (ν, ˆµν, ˆσν) that maximizes the likelihood.
2.3
Simulation Study
We present results from simulation studies designed to illustrate features of the new robust MEM-estimators and compare them with established robust methods. Our objective is to demonstrate that the new methods are competitive with established
methods.
2.3.1
Performance for Small
B
In order to decide on a suitable value ofB to be used in the Monte Carlo likelihood, we
investigated the performance (bias, variance, mean squared error) of the estimators for different values of B (50, 200, and 800). For this preliminary study, the data were standard normal, sample size was n = 200, and 2,500 replicate data sets were
generated and analyzed.
The indicated conclusions from the simulation are: 1) location estimates are
un-biased for allB and all target efficiencies, with greater variability for estimators with lower target efficiencies; 2) scale estimates are biased high and are more variable for low values of B and low target efficiencies, although bias is negligible for B = 800,
and variability levels off for B ≥ 200; 3) the invariant estimators generally perform better than their non-invariant counterparts. Thus, in the following simulation study we use B=800.
2.3.2
Comparison with Huber’s Proposal 2
Huber’s Proposal 2 (Huber, 1964) is arguably the most used robust estimator of location and scale and we designed a simulation study to compare it to the MEM-estimators. The study was also designed to illustrate the performance of the new
invariant estimators with a small sample size (n = 25), and over a broad range of distributions. Huber’s Proposal 2 is an M-estimator with ψ function
ψ(w, µ, σ) = ⎛
⎝ χk((w−µ)/σ)
χ2k((w−µ)/σ)−E{χ2k(Z)} ⎞ ⎠,
where χk(z) = min{k,max(−k, z)} and Z ∼ N(0,1). Note that Huber’s Proposal 2 has only one tuning parameter k. Because interest lies primarily in location estima-tion, we chose k = 0.982 resulting in 90% efficiency for µ at the normal model; and
Figure 2.3: Performance of normal contamination estimators with small B B bias -0.003 -0.001 0.0 0.001
50 200 800
B var 0.0050 0.0054 0.0058 0.0062
50 200 800
B
mse
0.0050
0.0054
0.0058
50 200 800
B bias 0.0 0.01 0.02 0.03 0.04
50 200 800
B var 0.0 0.001 0.002 0.003 0.004
50 200 800
B mse 0.002 0.003 0.004 0.005 0.006
50 200 800
Top three plots, left to right: bias, variance and mean squared error (mse) for location
estimators. Bottom three plots, left to right: bias, variance and mse for scale estimators.
Figure 2.4: Performance of Laplace contamination estimators with small B B bias -0.004 -0.002 0.0 0.002
50 200 800
B var 0.0050 0.0055 0.0060 0.0065 0.0070
50 200 800
B mse 0.0050 0.0055 0.0060 0.0065 0.0070
50 200 800
B bias 0.0 0.02 0.04 0.06
50 200 800
B var 0.0025 0.0035 0.0045 0.0055
50 200 800
B mse 0.003 0.005 0.007 0.009
50 200 800
Top three plots, left to right: bias, variance and mean squared error (mse) for location
estimators. Bottom three plots, left to right: bias, variance and (mse) for scale estimators.
Figure 2.5: Performance of Cauchy contamination estimators with small B B bias -0.004 -0.002 0.0 0.002 0.004
50 200 800
B var 0.0045 0.0050 0.0055 0.0060
50 200 800
B mse 0.0045 0.0050 0.0055 0.0060
50 200 800
B bias -0.005 0.005 0.015 0.025
50 200 800
B var 0.0025 0.0030 0.0035 0.0040
50 200 800
B mse 0.0025 0.0030 0.0035 0.0040
50 200 800
Top three plots, left to right: bias, variance and mean squared error (mse) for location
estimators. Bottom three plots, left to right: bias, variance and mse for scale estimators.
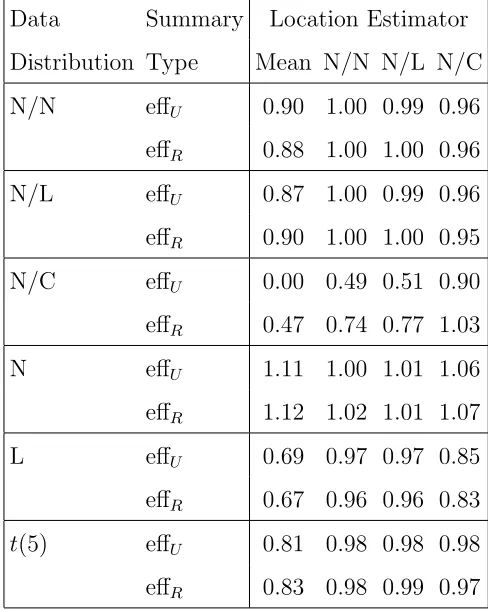
Table 2.2: Estimated efficiencies relative to Huber’s Proposal 2 of location estimators.
Data Summary Location Estimator Distribution Type Mean N/N N/L N/C
N/N effU 0.90 1.00 0.99 0.96
effR 0.88 1.00 1.00 0.96
N/L effU 0.87 1.00 0.99 0.96
effR 0.90 1.00 1.00 0.95
N/C effU 0.00 0.49 0.51 0.90
effR 0.47 0.74 0.77 1.03
N effU 1.11 1.00 1.01 1.06
effR 1.12 1.02 1.01 1.07
L effU 0.69 0.97 0.97 0.85
effR 0.67 0.96 0.96 0.83
t(5) effU 0.81 0.98 0.98 0.98 effR 0.83 0.98 0.99 0.97
Distributions: N/N(L, C), normal with normal (Laplace, Cauchy) contamination; N,
nor-mal; L, Laplace; t(5), t with five degrees of freedom. Summary type: effU, usual; effR, ro-bust. Estimators: Mean, sample mean; N/N(L, C), robust likelihood with normal (Laplace,
Cauchy) contamination. Top entry, standard deviation efficiency; bottom entry, MAD
effi-ciency. Monte Carlo efficiency estimates are accurate to within±0.02.
Data were generated from the three error-contamination models used to define the new estimators, (normal/Normal, normal/Laplace and normal/Cauchy), as well
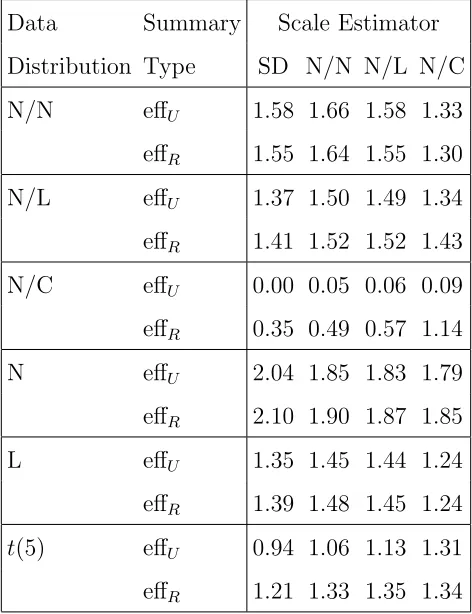
Table 2.3: Estimated efficiencies relative to Huber’s Proposal 2 of scale estimators.
Data Summary Scale Estimator Distribution Type SD N/N N/L N/C
N/N effU 1.58 1.66 1.58 1.33
effR 1.55 1.64 1.55 1.30
N/L effU 1.37 1.50 1.49 1.34
effR 1.41 1.52 1.52 1.43
N/C effU 0.00 0.05 0.06 0.09
effR 0.35 0.49 0.57 1.14
N effU 2.04 1.85 1.83 1.79
effR 2.10 1.90 1.87 1.85
L effU 1.35 1.45 1.44 1.24
effR 1.39 1.48 1.45 1.24
t(5) effU 0.94 1.06 1.13 1.31 effR 1.21 1.33 1.35 1.34
Data distribution: N/N(L, C), normal with normal (Laplace, Cauchy) contamination; N,
normal; L, Laplace; t(5), t with five degrees of freedom. Summary type: effU, usual ef-ficiency measure; effR, robust efficiency measure. Estimators: SD, sample standard
devi-ation; N/N(L, C), robust likelihood with normal (Laplace, Cauchy) contamination. Top
entry, standard deviation efficiency; bottom entry, MAD efficiency. Monte Carlo efficiency
estimates are accurate to within ±0.02.
Table 2.2 includes efficiencies relative to Huber’s Proposal 2 for location estima-tors. Efficiencies were calculated in two ways. The first is the usual ratio of Monte
per-formance using both measures of efficiency to address the possibility of occasional
unusual estimates arising from convergence problems that are difficult to assess on a case-by-case in the course of a simulation study. In each case an efficiency greater than one indicates performance better than Huber’s Proposal 2.
With the exception of the results for the normal/Cauchy data, Table 2.2 contains few surprises. The new MEM-estimators perform almost as well as Huber’s Proposal
2. Note that the robust-estimator efficiencies for the case of normal data should all be approximately equal to one, by choice of the tuning parameters. The inverse of the efficiency of the mean (1/1.11 = 0.90) indicates that all of the robust estimators
have efficiencies approximating the nominal level of 90%.
For normal/Cauchy data there is some discrepancy between the usual efficiency summary and the robust efficiency summary, indicating the presence of some outliers in the MEM-estimators of location. Our analysis of these results suggests that the
outliers arise as a consequence of the extremely heavy tails of the Normal/Cauchy data model (recall that the proportion of Cauchy contamination is 0.710) in combination with the use of the Monte Carlo likelihood. For the Laplace and Cauchy
MEM-estimators of location the theoretical score functions are bounded and redescending respectively (see Figure 2.2) . However, the Monte Carlo versions of the same score functions are only estimates of these limiting (B → ∞) cases. For finiteB the score
of the good performance of the new estimators at the reasonably heavy-tailed t(5)
distribution, the poor performance at the extremely heavy tails of the normal/Cauchy model is not too bothersome.
Table 2.3 displays measures of efficiency relative to Huber’s Proposal 2 for scale
estimators, defined in terms of variability relative to a measure of central tendency. For the same reason cited in the discussion of location results, we did this in two ways, the usual method using Monte Carlo means and standard deviations, and
a robust counterpart. For the usual method, efficiency is defined as eff(θ1,θ2) =
SD(θ2)/E(θ2)
SD(θ1)/E(θ1) 2
whereE() and SD() denote the Monte Carlo mean and standard deviation. The robust measure of efficiency is defined by replacing
means and standard deviations with medians and median absolute deviations.
Table 2.3 contains few surprises except for the normal/Cauchy data. The MEM-estimators are generally more efficient than that of Huber’s Proposal 2. Note that in
Huber’s Proposal 2 estimation the tuning parameter k = 0.982 results in much lower efficiency for scale (47%).
2.3.3
Adaptivity of the
t
-Adaptive Approach
We generated data from the invariant error-contamination model normal/t(ν) with
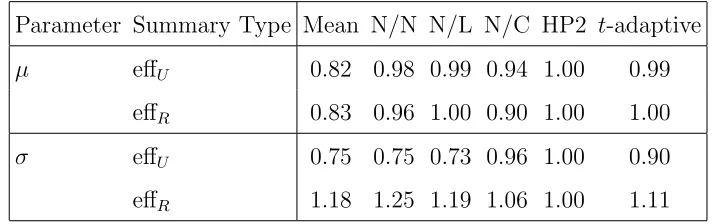
νbut the relationship is not linear with unit slope. That is, ¯νˆ(12)is significantly greater than ¯νˆ(6), and ¯νˆ(18)is significantly greater than ¯νˆ(12); but neither ¯νˆ(18)and ¯νˆ(24)nor ¯νˆ(30) and ¯νˆ(24) are significantly different. Obviously, the approach is only weakly adaptive. Tables 2.4 presents results of the simulation study for location and scale
estima-tion. Efficiencies are defined in the same way as before. The t-adaptive estimator does perform better than or as well as MEM-estimators with regard to location esti-mation. For scale estimation, it does not show overall better performance compared
to other ones.
Table 2.4: Estimated efficiencies of t-adaptive estimators relative to Huber’s Pro-posal 2
Parameter Summary Type Mean N/N N/L N/C HP2 t-adaptive
µ effU 0.82 0.98 0.99 0.94 1.00 0.99
effR 0.83 0.96 1.00 0.90 1.00 1.00
σ effU 0.75 0.75 0.73 0.96 1.00 0.90
effR 1.18 1.25 1.19 1.06 1.00 1.11
Summary type: effU, usual; effR, robust. Estimators: Mean, sample mean; N/N(L, C),
robust likelihood with normal (Laplace, Cauchy) contamination; HP2, Huber’s Proposal 2.
Figure 2.6: Boxplot of estimated degrees of freedom versus true degrees of freedom
for the t-adaptive estimators.
Chapter 3
Bayesian Inference for Robust
Error Contamination Models with
Application to Time Series Data
3.1
Introduction
There has been a rapid growth in the subject of robust estimation for time
se-ries models in the last two decades. The early proposals mostly dealt with auto-regressive processes. Denby and Martin (1979) proposed a generalized M-estimator (GM-estimator) by adding a bounded weight function in the M-estimation equation.
residual auto-covariances, were proposed by Bustos and Yohai (1986) as an
alterna-tive to the GM-estimator and K¨unsch’s method. However, these methods do not have satisfactory robustness properties for moving average or mixed auto-regressive mov-ing average (ARMA) models. Bustos and Yohai (1986) proposed estimators based on
truncated residual autocovariances, or TRA estimators, to overcome the deficiency. TRA estimators are qualitatively robust for stationary and invertible ARMA models, but have fairly low breakdown points. A different method of dealing with additive
outliers in time series models, based on recursive generalized M-estimator, was intro-duced in Allende and Heiler (1992), and was shown to outperform other previously proposed methods in a Monte Carlo study. But the method suffers from the problem
of costly computation and the lack of theoretical robustness results. More recently, de Luna and Genton (2001) proposed robust, simulation-based estimation of ARMA models inspired by the indirect inference method.
In this chapter we present an alternative robust approach for ARMA models contaminated by additive outliers, which is based on the robust error contamination
model described in Chapter 2, and implemented through Bayesian inference. We call this new robust estimator BMEM-estimator.
The chapter is arranged as follows. In Section 2 we describe the error contami-nation model and the theoretical robustness properties, and in Section 3 we present
3.2
Robust Error Contamination Models with
Ap-plication to Correlated Data
In this chapter, we will restrict out attention to the invariant error model
Wi =Xi+τ σZi, i= 1, . . . , n. (3.1)
WithX1, . . . , Xn having joint density f(x;θ), the joint density ofW1, . . . , Wn is
fW(w|θ, , τ) =
· · ·
f(w1−τ σz1, . . . , wn−τ σzn;θ)
n
i=1
G(dzi), (3.2)
where
G(z) = (1−)I(0≤z) +
z
−∞
g(x)dx.
3.2.1
Application to Correlated Data
The theoretical robustness results derived for independent and identically distrib-uted data in Chapter 2 can be directly extended to the case where X1, . . . , Xn are correlated. Define
an(u;θ) = n
· · ·
f(s;θ)
n
i=1
1
τ σg
ui−si τ σ
dsi
,
and
where h(u;θ) is the contaminated density under the error model (3.1). With these
definitions, the likelihood score function becomes
ψ(u;θ, , τ) = ∂
∂θlnh(u;θ)
= q˙(u;θ) + ˙an(u;θ)
q(u;θ) +an(u;θ),
where ˙q(u;θ) = (∂/∂θ)q(u;θ) and ˙an(u;θ) = (∂/∂θ)an(u;θ). Define
pn(u) = 1
τ σ n i=1 g u i τ σ , and write
ψ(u;θ, , τ) = q˙(u;θ)/pn(u) + ˙an(u;θ)/pn(u)
q(u;θ)/pn(u) +an(u;θ)/pn(u). (3.3) In the appendix (A.9) we prove that iff is multivariate normal andg has polynomial-like tails or exponential-polynomial-like tails (see (2.9) and (2.10)), then
lim min|ui|→∞
qp(nu(;uθ))+q˙(u;θ)
pn(u)
= 0. (3.4)
Therefore the behavior of the score function is determined by the tail behavior of
an(u;θ)/pn(u) and ˙an(u;θ)/pn(u). Note that
an(u;θ)
pn(u) =
n · · · f(s;θ)n
i=1
g((ui−si)/τ σ)
g(ui/τ σ) dsi
.
and
˙
an(u;θ)
pn(u) =
(∂/∂θ)an(u;θ)
pn(u) .
For the case of polynomial-like tails, note that lim|u|→∞g(u+b)/g(u) = 1 and
that limits and integration are interchangeable, so
lim min|ui|→∞
· · ·
f(s;θ)
n
i=1
g((ui−si)/τ σ)
g(ui/τ σ) dsi
=
· · ·
f(s;θ)
n
i=1
lim |ui|→∞
g((ui−si)/τ σ)
g(ui/τ σ) dsi
=
· · ·
f(s;θ)
n
i=1
1dsi
= 1. (3.5)
Equations (3.3), (3.4) and (3.5) lead to
lim min|ui|→∞
ψθ
(σ)(u;θ, , τ)
= lim
min|ui|→∞
∂ ∂θ(σ)
· · ·
f(s;θ)
n
i=1
g((ui−si)/τ σ)
g(ui/τ σ) dsi
,
where θ(σ) denotes all parameters except σ. Since the gross errors in the invariant error model (3.1) includes σ, we need to treat the σ component of the score function differently, which is written as
lim min|ui|→∞
ψσ(u;θ, , τ)
= · · · (∂/∂σ)f(s;θ) n
i=1{g((ui−si)/τ σ)/τ σ} dsi
n
i=1g(ui/τ σ)/τ σ
. (3.6)
In light of (3.5) and the assumption that limits, integration and differentiation are interchangeable it follows that
lim min|ui|→∞
∂ ∂θ(σ)
· · ·
f(s;θ)
n
i=1
g((ui−si)/τ σ)
g(ui/τ σ) dsi
= ∂
∂θ(σ)minlim|ui|→∞
· · ·
f(s;θ)
n
i=1
g((ui−si)/τ σ)
g(ui/τ σ) dsi
Therefore
lim min|ui|→∞
ψθ
(σ)(u;θ, , τ) = 0.
The σ component of the score function is different from other ones due to the fact
that the density of the added errors τ σZ1, . . . , τ σZn depends on σ. In the appendix (A.10), we show that
lim min|ui|→∞
ψσ(u;θ, , τ) = n(p−1)
σ . (3.7)
where p is the power of the polynomial decreasing tails, i.e., g(u) ∼ u−p. So the
Cauchy error contamination model (p= 2) yields a redescending score function except for scale estimation, which is bounded by n/σ.
For the case of exponential-like tails, we allowg(u) to have different tails asu→ ∞
and u→ −∞:
lim
u→∞
g(u+b)
g(u) = exp(c1b), u→−∞lim
g(u+b)
g(u) = exp(c2b),
for some constants c1 and c2. Set N1 to be any subset ofN ={1, . . . , n}, and let N2
be the set difference N −N1. Then
lim
uk→ ∞, k∈N1
uj→ −∞, j∈N2
· · ·
f(s;θ)
n
i=1
g((ui−si)/τ σ)
g(ui/τ σ) dsi
=
· · ·
f(s;θ)
k∈N1
lim
uk→∞
g((uk−sk)/τ σ)
g(uk/τ σ)
j∈N2
lim
uj→−∞
g((uj −sj)/τ σ)
g(uj/τ σ) ds
=
f(s;θ) exp
−c1 τ σ
k∈N1
sk− c2 τ σ
j∈N2
sj
ds. (3.8)
It follows that
lim
uk→ ∞, k∈N1
uj→ −∞, j∈N2
ψθ
(σ)(u;θ, , τ) = ∂
where vk =−c1/τ σ for k ∈N1, vj =−c2/τ σ for j ∈N2 and mf(·,θ) is the moment generating function of f(·,θ), assumed to exist. So the error contamination model with the exponential-like tails results in a bounded score function except for σ. In Chapter 2 we showed that for the invariant error model with exponential-like tails,
the score function for σ is unbounded in the case of independent and identically distributed data. The proof in Appendix A.11 shows that it is unbounded in the case of correlated data as well.
3.2.2
Types of Outliers for Time Series Data
Let{Xt, t∈(1, . . . , n)}be a stationary stochastic process. An auto-regressive moving average (ARMA) time series of order (p, q) is defined by
Xt−µ=
p
i=1
αi(Xt−i−µ) +
q
j=1
βjet−j +et, (3.9)
where {et} is assumed to be independently and identically distributed with mean
zero and finite variance δ2, which is selected to make Var(Xt) = σ2 . When {et} is normal, {Xt} has a N(µ, σ2) distribution. We assume that model (3.9) is a causal and invertible process (Fuller 1996).
There are two types of outliers generally considered for time series data: innova-tion outliers (IO) and additive outliers (AO). The time series {Xt} is said to have