2018 International Conference on Communication, Network and Artificial Intelligence (CNAI 2018) ISBN: 978-1-60595-065-5
Research on TDOA/AOA Fusion Algorithm Based on UWB Technology
Cheng-xiao WANG
1,3, Chong SHEN
1,3,*, Kun ZHANG
1,2,3, Han-wen LI
2,
Qian GAO
1,3and Xiao-min FENG
1,31State Key Laboratory of Marine Resources Utilization in South China Sea, Haikou, Hainan, China
2College of Ocean Information Engineering, Hainan Tropical Ocean University,
Sanya, Hainan, China
3College of Information Science and Technology, Hainan University, Haikou, Hainan, China
*Corresponding author
Keywords: UWB positioning technology, TDOA / AOA fusion algorithm, Weighting coefficient.
Abstract. This paper presents a joint UWB positioning technology and improved TDOA / AOA fusion positioning algorithm which is improved by a two-dimensional algorithm. In the framework of UWB technology, the initial coordinates of the target node are calculated by combining the measurement algorithm AOA and the TDOA algorithm in the two-dimensional plane. An improved algorithm is proposed to calculate the weight coefficient using the initial node coordinates and eliminate the error interference, and then calculate the final location of the label according to the weighting coefficient. Experimental results show that the improved TDOA / AOA fusion algorithm is significantly superior to the original TDOA / AOA fusion algorithm in positioning accuracy.
Introduction
Precise indoor positioning technology plays an increasingly important role in home safety, public service and other commercial and military applications[1].UWB has obvious advantages in accuracy, real-time performance and data bandwidth. What's more, it has strong anti-multipath capability, high time resolution and penetrating ability[2,3]. These features are conducive to real-time positioning and dynamic data collection in indoor complex multipath environments. So UWB technology is used in this paper to transmit indoor detection signals, effectively improve the accuracy of the received signal.
This paper focuses on the study of the location coordinates of indoor nodes. Combining the UWB technology to wirelessly transmit indoor signals, and an improved TDOA / AOA fusion algorithm is proposed. Using two-dimensional AOA and TDOA algorithm to derive the angle and distance between the label and the base station[4,5], respectively, and to estimate the initial position coordinates. Then calculate the weighting coefficient according to the initial position coordinates to effectively eliminate the error caused by the non-line-of-sight obstacles and the system measurement to obtain the final position of the label.
TDOA / AOA Fusion Algorithm to Calculate the Initial Coordinates of the Target Node
Figure 3. TDOA / AOA fusion algorithmto solve the initial position of MSschematic diagram.
The AOA Algorithm Measures the Angle Between the Label and the Base Station
As shown in figure 1, the angle α between the node Q to be measured and the base station O is the angle between the straight line QO and the plane XOY, two ultrasonic transmitters (S1andS2) are mounted at a distance r on the upper and lower sides of the base station O to emitted same phase and same phase, and the two ultrasonic signals will interfere at point Q. The angle α between the node Q to be measured and the base station O can be get according to formula (1) :
v
arcsin( ) arcsin( )
v F
2rfT 2rf . (1)
Where v is the propagation velocity of the ultrasonic wave; 2r is the distance between the two ultrasonic transmitters; f is the change rate of the frequency of the ultrasonic signal source; T is the change period of the intensity of the Q point synthesized wave when the change rate of the signal source frequency is f'; F is the frequency change of the intensity of the synthesized wave at the corresponding Q point.
The TDOA Algorithm Measures the Distance Between the Label and the Base Station
The principle of TDOA ranging algorithm used in this paper is shown in figure 2. The transmitting node simultaneously emits two signals of different frequencies (signal 1 and signal 2, respectively). The receiving node records the arrival time of the two signals. The propagation velocities of the two signals are known asv ,1 v , The distance can be derived from equation (2): 2
1 2 2 1
1 2
( )
v v d t t
v v . (2)
Estimate the Initial Coordinates of the Target Node
As shown in figure 3, there are three base stations A, B and C in the indoor monitoring area, and their coordinates are respectively A x( , , )1, y z1 1 , B x y z( , , )2 2 2 , C x y z( , , )3 3 3 . The MS coordinate is
) , , (x y z
Q . The angle between Q and base stations A, B and C is , , and can be measured by AOA algorithm, the distances between Q and A, B and C ared ,1d ,2d , which can be measured by 3 TDOA algorithm based on UWB technology. QA,QB, QCare respectively the foot of Q in the horizontal plane corresponding to the base station. From this picture, it can be seen that QA d1,
A QAQ
=
, QB d2, QBQB , QC d3,QCQ C , there is2 2 2
1 1 1 1
2 2 2
2 2 2 2
2 2 2
3 3 3 3
( -x) ( ) ( )
( -x) ( ) ( )
( -x) ( ) ( )
x y y z z d
x y y z z d
x y y z z d
3 1 1 2 2 2 sin sin sin z z d z z d z z d
. (4)
From equations (3)(4), the coordinates (x, y,) of the target node can be shown in equation (5), then the z coordinate of the target node can be obtained.
1 2 2 2 2 2 2
1 3 1 3 1 3 1 3 3 1
2 2 3 2 2 2
2 3 2 3 2 3 2 3 3 2
2( ) 2( ) x ( cos ) ( cos )
x
y 2( ) 2( ) x ( cos ) ( cos )
x x y y x y y d d
x x y y x y y d d . (5)
The Weighted Coefficients are Calculated to Determine the Final Coordinates of the Target Node
In view of the transmission error caused by non-line-of-sight error [6], this paper firstly uses the above location algorithm to estimate the initial coordinates of the target node and then proposes the weighting coefficients to calculate the weighting coefficients of the positioning results of the two algorithms. The initial coordinates are corrected according to the weighting coefficients to obtain the final position coordinates. To calculate the weighting coefficients, we first define the residual between the positioning result and the measured value as:
2
es 1
( )
m i ii
r X X . (6)
Where 2 2 2
i ( i) ( i) ( i)
r x x y y z z is the distance between the node and the i-th base
station, ^ ^ ^
T
X x y z is the initial positioning coordinate obtained by the above algorithm, ^ ^ ^
T
i i i i
X x y z is the coordinate of the i-th base station participating in the positioning, M is the
number of the base stations participating in the positioning, and assuming k positioning algorithms, then the weighting coefficient of k-th algorithm is
2
k i
i 2
( ) /
k ri XKX N. (7)Where ^ ^ ^
T
k k k k
X x y z is the result of the k-th location algorithm, then the final location
coordinate of the target node '( ^ ^ ^ )' T
X x y z is
' 1 1
1 1
/
K kk
K kk k
X X . (8)
Simulation and Results Analysis
range of the positioning accuracy of this algorithm is obtained through multiple independent and repeated experiments. Simulation conditions are set as follows:
1. A room with the area of 15m×10m×3m is selected to be the test environment; 2. The coordinates of the three base stations:
A( 12.3,1.17,1.21 ),B( 9.3,8.3,1.21 ),C( 1.1,2.5.37 ,1.95 )
3. Experimental parameters: r=0.2m, v1=3×108m/s, v2=340m/s; the initial frequency of ultrasound f020kHz; the termination frequency f1160kHz; SNR = 10dB.
RMSE Performance Analysis of Improved TDOA / AOA Fusion Algorithm
The improved TDOA / AOA fusion algorithm and the original TDOA / AOA algorithm without correction are compared and simulated by MATLAB. The RMSE (Root Mean Square Error) is selected as the measurement standard of positioning accuracy, exploring the differences of the RMSE between the two positioning algorithms at different MSE. Formula (9) to calculate MSE:
^ ^ ^
2 2 2
[( ) ( ) ( )]
MSE E x x y y z z . (9)
Where the actual coordinate of the MS is(x y z, , ), and the measured coordinate of MS
is(x y z^, ,^ ^). The positioning accuracy is assessed by RMSE, which is calculated as Formula (10):
^ ^ ^
2 2 2
[( ) ( ) ( )]
RMSE E x x y y z z . (10)
According to the parameters and evaluation index above, the positioning accuracy of the two algorithms under different MSE is compared as shown in the figure 4.
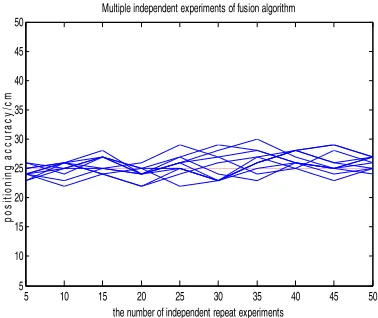
Multiple Independent Repeated Experiments of Improved TDOA / AOA Fusion Algorithm
In order to determine the range of positioning accuracy of the improved algorithm, we conducted several independent and independent experiments repeatedly. The MSE is set as:MSE 0.5 10 -2m. The simulation of the positioning accuracy is shown in figure 5.
0.5 1 1.5 2 2.5 3 3.5 4 0
0.5 1 1.5 2 2.5 3 3.5
Mean Square Error/0.01m
RM
S
E
/m
mparison of RMSE between Improved TDOA / AOA Fusion Algorithm and Original TDOA / AOA Alg Improved TDOA / AOA fusion algorithm The original TDOA / AOA fusion algorithm
5 10 15 20 25 30 35 40 45 50 5
10 15 20 25 30 35 40 45 50
the number of independent repeat experiments
pos
iti
oni
ng ac
cur
ac
y/
cm
[image:4.612.313.502.475.634.2]Multiple independent experiments of fusion algorithm
Figure 4. RMSE comparison between the improved TDOA / AOA fusion algorithm and the original TDOA /
AOA algorithm.
[image:4.612.92.286.478.633.2]Summary
This paper mainly studies an improved TDOA / AOA fusion localization algorithm. Using UWB technology to realize the signal transmission of the whole algorithm, TDOA / AOA fusion algorithm is used to estimate the initial position of the target in space, and the use of the weighting coefficient to correct the initial coordinates in this paper can effectively improve the positioning accuracy. Multiple independent experiments further show that the improved algorithm proposed in this paper, the positioning accuracy is stable between 22cm ~ 28cm when setting the mean square error is small. The next step will continue to study to achieve a higher and more stable positioning accuracy when the mean square value is larger.
Acknowledgement
This research was financially supported by the National Natural Science Foundation of China (No.61461017); the Hainan Natural Science Foundation Innovation Research Team Project (No.2017CXTD0004); the Open Topic of State Key Laboratory of Marine Resources Utilization in South China Sea of Hainan University(No.2018012); Collaborative Innovation Fund of Tianjin University & Hainan University(No.HDTDU201810)..
References
[1] Q. Liu, J.H. Qiu, Y. Chen, Research and Development of Indoor Positioning, China Communications, 2016,13 (S2): 67-79.
[2] Q. Gao, C. Shen, F. Dong, X.S. Chen, X.G Xie, W.S. Wang, L.Q. Zhen, Time-driven Opportunistic Routing Protocol for UWB Indoor Positioning, International Journal of Distributed Sensor Networks, 12 (12): 1-9.
[3] K. Zhang, C. Shen, H.F. Wang, Q. Gao, H.W. Li, N. Li, An Improved Three-dimensional Location Algorithm and Simulation of AOA and TDOA based on Wave Interference Sensors, Boletin Tecnico/Technical Bulletin, 55 (19): 211-219.
[4] K.Y. Duan, L.J. Zhang, TDOA / AOA localization algorithm based on arrival angle Kalman filter, Journal of Electronics & Information Technology, 28 (9): 1710-1713.
[5] Macl, R. Klukas, G. Lachapelle, An enhanced two-step least squared approach for TDOA/AOA wireless location, The International Chamber of Commerce. 2003, 2: 987-991.
[6] C. Li, W.H. Zhuang, Hybrid TDOA/AOA mobile user location for wideband CDMA cellular system. IEEE Trans on Wireless Communications, 18 (3): 439-447.
[7] K. Zhao, D.N. Paint, FDOA and TDOA Joint Location and Tracking Algorithm Based on UKF Filtering , Computer Technology and Development, 22 (5): 127-129.