The Thirty-Third AAAI Conference on Artificial Intelligence (AAAI-19)
Disjunctive Normal Form for Multi-Agent
Modal Logics Based on Logical Separability
Liangda Fang,
1Kewen Wang,
2Zhe Wang,
2Ximing Wen
3 1Department of Computer Science, Jinan University, China2School of Information and Communication Technology, Griffith University, Australia
3Guangdong Institute of Public Administration, Guangzhou, China
[email protected],{k.wang,zhe.wang}@griffith.edu.au, [email protected]
Abstract
Modal logics are primary formalisms for multi-agent systems but major reasoning tasks in such logics are intractable, which impedes applications of multi-agent modal logics such as au-tomatic planning. One technique of tackling the intractabil-ity is to identify a fragment called a normal form of multi-agent logics such that it is expressive but tractable for reason-ing tasks such as entailment checkreason-ing, bounded conjunction transformation and forgetting. For instance,DNFof proposi-tional logic is tractable for these reasoning tasks. In this pa-per, we first introduce a notion of logical separability and then define a novel disjunctive normal formSDNFfor the multi-agent logicKn, which overcomes some shortcomings of
exist-ing approaches. In particular, we show that every modal for-mula inKncan be equivalently casted as a formula inSDNF,
major reasoning tasks tractable in propositionalDNFare also tractable inSDNF, and moreover, formulas inSDNFenjoy the property of logical separability. To demonstrate the use-fulness of our approach, we applySDNFin multi-agent epis-temic planning. Finally, we extend these results to three more complex multi-agent logicsDn,K45nandKD45n.
1
Introduction
It is crucial for an intelligent agent system to be capable of representing and reasoning about high-order knowledge in the multi-agent setting. A general representative frame-work for these scenarios is multi-agent modal logics. How-ever, some important reasoning tasks, including satisfiabil-ity checking and forgetting, are intractable in such logics (Halpern and Moses 1992; Bienvenu 2009). The intractabil-ity results impede applications of multi-agent modal logics,
e.g., multi-agent epistemic planning (Kominis and Geffner 2015; Huang et al. 2017).
Traditionally, the forward search algorithm is effective for agent planning (Bryce, Kambhampati, and Smith 2006), in which the search is performed in the space of knowledge bases (KBs) proceeding forward from the initial KB towards a goal KB entailing the goal formula. Two types of reasoning tasks are essential to the search algorithm, namely, progres-sion and entailment check. The progresprogres-sion updates KBs ac-cording to the action effects while the entailment check is needed to decide if the current KB entails the goal formula
Copyright c2019, Association for the Advancement of Artificial Intelligence (www.aaai.org). All rights reserved.
and the action preconditions. If a normal form is defined such that its entailment check, bounded conjunction and for-getting are tractable, then both progression and entailment check in the normal form are tractable (Bienvenu, Fargier, and Marquis 2010). As a result, in the normal form, an ef-fective search algorithm is obtained. In the case of proposi-tional logic, a normal form can be disjunctive normal form (DNF), conjunctive normal form (CNF) or prime implicate. Usually, a planner based onDNFis faster than those based on CNFand prime implicate (To, Pontelli, and Son 2011; To, Son, and Pontelli 2011). This is due to the fact that, in propositional logic, DNF possesses tractable entailment check, bounded conjunction and forgetting, but CNF and prime implicate do not (Darwiche and Marquis 2002).
Thus, in order to develop effective search algorithms to multi-agent epistemic planning, researchers aimed to de-velop suitableDNF-like normal forms for multi-agent modal logics such that major reasoning tasks, such as bounded conjunction, forgetting and entailment check, are tractable. Such a disjunctive normal form, namedS5-DNF, is defined for modal logic S5but only for the single-agent case (Bi-envenu, Fargier, and Marquis 2010). When thisDNFis ex-tended to multi-agent modal logics, both entailment and for-getting will not be tractable any longer. Two other normal forms,cover disjunctive normal forms (CDNFs)(ten Cate et al. 2006) and prime implicate normal forms (PINFs) (Bi-envenu 2008), have been introduced for description logic ALC, a syntactic variant of the multi-agent modal logic
Kn. However, these two normal forms have some
shortcom-ings. CDNF is relatively less compact, that is, the CDNF representation is exponential large for some simple formu-las. Bounded conjunction for PINF is intractable and in the worst case a compiled formula in PINFis double ex-ponentially large. In addition, Moss (2007) introduced a canonical form of modal formulas for Kn andDn. While
modal formulas can be equivalently transformed into Moss’ canonical form, the complexity of the transformation is non-elementary. Hence, Moss’ canonical formulas are not a prac-tical normal form for epistemic planning.
the same reasoning for the conjuncts ofφ. For example, the formulaφ= (p→q)∧(q →r)is not logically separable since it logically implies a conjunctp → rthat is not de-rived by any single conjunct ofφ. By conjoiningφwith the implicit conjunct, the new formula becomes logically sepa-rable.
Based on the logical separability, we introduce a disjunc-tive normal form, calledseparability-basedDNF(orSDNF) for multi-agent modal logics Kn, Dn, K45n and KD45n.
Similarly, separability-based CNF (or SCNF) can also be defined. For these two normal forms and the two existing normal forms for multi-agent modal logics, we investigate the expressiveness, succinctness, queries and transforma-tions (Darwiche and Marquis 2002). Thus we obtain an al-most complete knowledge compilation map for multi-agent modal logics.
The main contributions of this paper contain:
1. We formulate the concept of logical separability for modal terms and formalise some desirable properties for them. Thanks to the notion of logical separability, we are able to define separability-basedDNFandCNF, two novel normal forms forKn.
2. For the two new normal forms as well as CDNF
andPINF, we investigate the expressiveness, succinctness, queries and transformations. To the best of our knowledge, we are the first to construct this map for multi-agent modal logics. Interestingly, SDNFL0 possesses all properties that
propositionalDNFhas,e.g., polytime satisfiability, bounded conjunction, forgetting and so on. In this sense, SDNF is a proper generalisation of propositionalDNFfor the multi-agent modal logicKn.
3. As a case study, we illustrate the application of our re-sults in multi-agent epistemic planning.
4. We extend the results of knowledge compilation for
Kn toDn without any modification on normal forms, and
toK45nandKD45nunder the condition that no consecutive
modalities of the same agent appear in the given formula.
2
The multi-agent modal logic
K
nIn this section, we first recall the syntax and semantics of the multi-agent epistemic logicKn, and then introduce two
normal forms ofKn, and major reasoning tasks inKn.
Syntax and semantics Throughout this paper, we fix a set Aofnagents and a countable setPof variables. The set of modal formulas, writtenL, is obtained from the following grammar:
φ::=> |p| ¬φ|φ∧φ|iφ,
wherep∈Pandi∈ A.
The formulaiφmeans that agentiknowsφ. The
sym-bols⊥,∨,→,↔, and♦iare defined as usual. We useiand
j for agents,Bfor sets of agents,pandqfor variables,Q
for finite sets of variables,ΦandΨfor finite sets of formu-las. For anL-formulaφ, we use|φ|for the size ofφ(i.e., the number of occurrences of variables, logical connectives, and modalities inφ),δ(φ)for the depth ofφ(i.e., the max-imal number of nested occurrences of modalities inφ), and
P(φ)for the set of variables appearing inφ. A formulaφis
smallerthanψ, if|φ|<|ψ|.
The notions of propositional literals, terms (TE), clauses (CL), disjunctive normal forms (DNF) and conjunctive nor-mal forms (CNF) are defined as usual.
A modal literal is a formula of the formiφor♦iφ, where
φis a modal formula. A modal literal is positive (resp. neg-ative), if it is of the formiφ(resp.♦iφ). A formula is
ba-sic, if it is a propositional formula or modal literal. Amodal term (resp.clause) is a conjunction (resp. disjunction) of basic formulas. For a modal term (resp. clause) φ, we use
Prop(φ)for the set of propositional components (i.e., maxi-mal propositional subformulas) that are conjuncts (resp. dis-juncts) ofφ,Bi(φ)for the set of formulasψsuch thatiψ
is a conjunct (resp. disjunct) ofφ, andDi(φ)for the set of
formulas ψsuch that ♦iψis a conjunct (resp. disjunct) of
φ. For example, consider the modal term φ = p∧ ¬q∧ i¬p∧iq∧♦i(¬p∨q)∧♦ip. Thus,Prop(φ) ={p∧ ¬q},
Bi(φ) ={¬p, q}, andDi(φ) ={¬p∨q, p}.
Definition 2.1. A Kripke modelMis a tuplehS,R,Viwhere • Sis a non-empty set of possible worlds;
• R={Ri |i∈ A}whereRiis a binary relation onS;
• V is a function assigning to eachs∈Sa subset ofP. A pointed Kripke model is a pair(M, s), whereM is a Kripke model andsis a world ofM, called theactual world. For convenience, we assume that Kripke models are pointed. Given a Kripke model(M, s)and anL-formula
φ, the satisfaction relationM, s|=φis defined as usual and in this case, we say that (M, s)is a model ofφ. A modal formulaφissatisfiableif it has a model;φentailsψ, written
φ |=ψ, if every model ofφis also a model ofψ;φandψ
areequivalent, writtenφ≡ψ, ifφ|=ψandψ|=φ. Throughout this paper, we useLandL0for fragments of L, and L0 andL00 for propositional fragments. We also
assume that every propositional term and clause has a poly-nomial representation inL0andL00. All propositional
frag-ments considered in (Darwiche and Marquis 2002) conform with this assumption except for fullDNF, that is, if each of its variables appears exactly once in every term. We sayL andL0 aredual, if there is a polytime reductionf fromL toL0 s.t. for eachφ ∈ L,f(φ) ≡ ¬φ, and vice verse. For example,DNFandCNFare dual in propositional logic.
Normal forms The cover disjunctive normal form (ten Cate et al. 2006) and the prime implicate normal form (Bi-envenu 2008) for the description logicALCcan be seen as two normal forms forKnsinceALCis a syntactic variant of
Kn. We rephrase them inKn.
Definition 2.2. A formulaφis incover disjunctive normal form (CDNF), if it is defined by
φ::=τ∧^
i∈B
OiΦi|φ∨φ,
where τ is a satisfiable propositional term, each Φi is in
CDNF,B ⊆ A, andOiΦiis a shorthand fori(Wφ∈Φiφ)∧
V
Definition 2.3. A modal clause1 c is animplicateof φ, if
φ |= c. A modal clausecis aprime implicate ofφ, ifc is an implicate ofφand for all implicatec0 ofφs.t.c0 |= c,
c|=c0.
Definition 2.4. A formula φis inprime implicate normal form (PINF), if it is>or⊥, or satisfies the following:
1. φ6≡ >andφ6≡ ⊥;
2. φis a conjunctionc1∧ · · · ∧cnof modal clauses where
(a) cj 6|=ckforj6=k;
(b) each prime implicate ofφis equivalent to some con-junctcj;
(c) everycjis a prime implicate ofφs.t. (i) ifdis a
dis-junct ofcj, thencj 6≡cj\ {d}; (ii)|Di(cj)| ≤ 1for
i∈ A; (iii) for everyi∈ A, ifβ ∈Bi(cj)∪Di(cj)
thenβ is inPINF; (iv) for everyi ∈ A,β ∈ Bi(cj)
andγ∈Di(cj), we haveγ|=β.
Queries and Transformations Darwiche and Marquis (2002) enumerates a set of knowledge compilation proper-ties for propositional logics, and classifies them into two cat-egories: queries and transformations. The basic queries in-clude polytime tests for satisfiability (CO), validity (VA), equivalence (EQ), sentential entailment (SE), clausal en-tailment (CE), implicant (IM), model counting (CT) and model enumeration (ME), while the basic transformations are (bounded) conjunction (∧BC/∧C), (bounded) disjunc-tion (∨BC/∨C), negation (¬C), conditioning (CD), and (singleton) forgetting (SFO/FO). Most of them can be di-rectly generalized to multi-agent modal logics except modal counting and enumeration since any satisfiable formula has infinitely many distinct models. Due to space limit, we only present the definition of satisfiability check, bounded con-junction and forgetting. For details, please refer to (Dar-wiche and Marquis 2002).
Definition 2.5. A languageLpossesses the propertyCO, if there is a polytime algorithm for deciding its satisfiability.
Definition 2.6. A language Lsatisfies ∧BC, if there is a polytime algorithm generating a formula ofLequivalent to
φ∧ψfor each pair of formulasφ, ψ∈ L.
A definition of forgetting for modal logics is defined in (French 2006) and it is further investigated in (Fang, Liu, and van Ditmarsch 2016).
Definition 2.7. Let φ ∈ L andQ ⊆ P. We sayψ isa result of forgettingQinφ, if
1. P(ψ)⊆P\Q;
2. for any formulaηs.t.P(η)⊆P\Q,φ|=ηiffψ|=η. As the result of forgetting is unique up to logical equiv-alence, we use∃Q.φto denote the result of forgettingQin
φ.
Definition 2.8. A languageLsatisfiesFO, if there is a poly-time algorithm that maps every formulaφ ∈ Land every subsetQ⊆Pto anL-formula that is equivalent to∃Q.φ.
1
The definition of modal clauses in (Bienvenu 2008) is a bit different from that in this paper. It is defined as a disjunction of propositional literals and modal literals.
3
Separability-based
DNF
and
CNF
In this section, based on logical separability, we introduce a general framework for defining normal formsDNFandCNF
inKn.
One might wish to define a disjunctive normal form forKn
as a disjunction of modal terms. However, this option would not work as none of satisfiability and forgetting is tractable for such a normal form. The problem lies in the definition of modal terms as a modal term can be logically inseparable. This can be seen from the following example.
Example 1. Consider the modal term φ = i(p∨q)∧
i(¬p∨q)∧♦i¬q. Since φis unsatisfiable, it holds that
φ |= ⊥. But ⊥cannot be derived from any modal literal ofφalone. Hence, the satisfiability problem ofφcannot be decomposed into its conjuncts. Informally, the formulaφis logically inseparable.
This example reveals that logical inseparable modal terms do not enjoy the modularity property for satisfiability,i.e., the satisfiability problem of a modal term φcannot be re-duced to those of each formula in P rop(φ), Bi(φ) and
Di(φ), leading to the impossibility result of tractable
sat-isfiability check. Consequently, we consider only logically separable modal terms in the following. Based on the above observation, we can formalise the logical separability as fol-lows.
Definition 3.1. A modal termφislogically separable, iff for every basic formulaη, ifφ|=η, then there isα∈Prop(φ)
orαis a modal literal ofφs.t.α|=η.
Intuitively, logical separability requires that no logical puzzles are hidden within parts of modal terms.
Example 2. Continued with Example 1, the modal termφis logically inseparable sinceφ|=⊥but no conjunct ofφ en-tails⊥. The modal termψ=iq∧♦i⊥, which is equivalent
toφ, is logically separable. Thanks to the logical separabil-ity ofψ, it is easy to observe thatψis unsatisfiable since⊥
is derived from one conjunct♦i⊥.
The logical separability of modal terms enforces the mod-ularity property for major reasoning tasks such as satisfiabil-ity check and forgetting. The satisfiabilsatisfiabil-ity problem of a log-ically separable term φcan be reduced to the satisfiability subproblems of each formula inP rop(φ)andDi(φ).
Proposition 3.1. Letφbe a logically separable modal term. Then φ is satisfiable iff every formula α ∈ P rop(φ)∪
S
i∈ADi(φ)is satisfiable.
Proof. Ifφis satisfiable, then each conjunct ofφis satisfi-able. Thus each propositional formulaα∈Prop(φ)is satis-fiable. It also holds for any epistemic literal♦iγwherei∈ A
andγ∈Di(φ). Thus, each formulaγ∈Di(φ)is satisfiable.
Conversely, assume that for every formulaα∈P rop(φ)∪
S
i∈ADi(φ),αis satisfiable, butφ is unsatisfiable. Then,
φ |= ⊥. Observe that φis logically separable. Then there is a propositional formulaα ∈ Prop(φ)or a modal literal
propositional. Hence,αis a negative modal literal♦iγ. This
implies thatγis unsatisfiable, a contradiction.
Similarly, forgetting a setQof variables in a logically sep-arable modal term φcan be accomplished by individually forgettingQin each formula ofP rop(φ),Bi(φ)andDi(φ).
Proposition 3.2. Letφbe a logically separable modal term andQa set of variables. Then∃Q.φ≡V
α∈P rop(φ)(∃Q.α)
∧V
i∈B[
V
β∈Bi(φ)(i(∃Q.βi))∧
V
γ∈Di(φ)(♦i(∃Q.γ))].
To prove Proposition 3.2, we need a lemma.
Lemma 3.1. Letφbe a satisfiable logically separable modal term. Then, the following statements hold:
1. For each propositional formulaα0,φ|= α0 iffα |= α0 for someα∈P rop(φ);
2. For each i ∈ Aand each positive modal literal iβ0,
φ|=iβ0iffβ|=β0for someβ∈Bi(φ);
3. For eachi ∈ Aand each negative modal literal♦iγ0,
φ|=♦iγ0iffγ|=γ0for someγ∈Di(φ).
Proof. We show only the second statement. The other proofs are similar.
⇐: Sinceβ |=β0,iβ |=iβ0. Note thatiβis a
con-junction ofφ. Thus,φ|=iβ0.
⇒: Sinceφis logically separable,η |=iβ0, whereη ∈
Prop(φ)orηis a modal literal ofφ. Moreover, asiβ0is a
positive modal literal,ηmust be a positive modal literal too. Suppose thatη = iβ whereβ ∈ Bi(φ). It follows from
iβ|=iβ0thatβ |=β0.
We are ready to give the proof of Proposition 3.2.
Proof. Letψ denote formula on the right-hand-side. Con-sider two possible cases:
Case 1.φ is unsatisfiable: Then∃Q.φ is also unsatisfi-able, matching the requirements given in the definition of forgetting (cf. Definition 2.7). By Proposition 3.1, there is an unsatisfiable formulaα∈ P rop(φ), or for somei ∈ A, there isγ∈ Di(φ)s.t.γis unsatisfiable. Suppose thatαis
unsatisfiable. Thenψis also unsatisfiable sinceψcontains an unsatisfiable conjunct∃Q.α. Similarly,ψis unsatisfiable in the case whereγ∈Di(φ)is unsatisfiable.
Case 2.φis satisfiable: We only show the only-if direc-tion of Condidirec-tion 2 in Definidirec-tion 2.7: for each formulaηs.t.
P(η)⊆P \Q, ifφ|=η, thenψ|=η. It is easy to see the other conditions.
We prove the above proposition by induction on δ(φ), the depth of φ. By Definition 2.7, the proposition holds for the base case δ(φ) = 1. Suppose that δ(φ) > 1. By Theorem 2.4.9 in (Bienvenu 2009), everyL-formula can be equivalently transformed into a conjunction of modal clauses. So we assume without loss of generality that η is a conjunction of modal clauses. Let c be a conjunct of η
and of the formW
α0∈P rop(c)α0∨
W
i∈B0[
W
β0∈B i(c)(iβ
0)∨
W
γ0∈D i(c)(♦iγ
0)]. It suffices to show thatψ |=c. For sim-plicity, we letB=B0. Sinceφ|=c, it is easy to see that at least one of the following conditions holds.
1. V
α∈P rop(φ)α∧
V
α0∈P rop(c)(¬α0)is unsatisfiable;
2. there existi ∈ Bandγ∈Di(φ)s.t.γ∧Vβ∈Bi(φ)β∧
V
γ0∈D i(c)(¬γ
0)is unsatisfiable;
3. there existi∈ Bandβ0 ∈Bi(c)s.t.¬β0∧Vβ∈Bi(φ)β∧
V
γ0∈Di(c)(¬γ0)is unsatisfiable.
Once the conditions in Definition 2.7 are satisfied, tt fol-lows that γ ∧ V
β∈Bi(φ)β |=
W
γ0∈D i(c)γ
0. So
♦i(γ ∧
V
β∈Bi(φ)β) |= ♦i(
W
γ0∈D i(c)γ
0). Sinceφentails the for-mer formula, we get thatφ|=♦i(Wγ0∈Di(c)γ0). By Lemma
3.1, there is γ∗ ∈ Di(φ) s.t. γ∗ |= Wγ0∈Di(c)γ0. The
formula ∃Q.γ∗ is the result of forgetting Q in γ∗. By the induction hypothesis, ∃Q.γ∗ |= W
γ0∈D i(c))γ
0. Hence,
♦i(∃Q.γ∗)|=♦i(Wγ0∈Di(c))γ0). Since♦i(∃Q.γ∗)is a
con-junct ofψ, and♦iWγ0∈Di(c))γ0|=η,ψ|=η.
The following proposition gives the smallest logically separable modal term representation. In this normal form, there are at most one propositional part, and at most one pos-itive modal literal for each agent. Moreover, every formula inside♦ientails that insidei.
Proposition 3.3. The smallest logically separable modal term representation of a modal termφsatisfies
1. |P rop(φ)| ≤1;
2. for eachi∈ A,|Bi(φ)| ≤1;
3. for eachi∈ A,β∈Bi(φ)andγ∈Di(φ),γ|=β.
Proof. Observe that the smallest representation of unsatis-fiable formula is⊥. Thus, it is easy to the statements hold when φ is unsatisfiable. We now assume that φ is satis-fiable, and only verify Condition 1. The other two condi-tions can be proven similarly. On the contrary, suppose that
α1, α2 ∈ P rop(φ)but they are distinct. If α1 |= α2 or
α2 |= α1, then one of them is redundant, andφis not the
smallest form. Otherwise,α1 6|= α2 andα2 6|= α1. Thus,
neither α1 nor α2 entails their conjunctionα1∧α2. This
violates Lemma 3.1.
Forgetting in a logically separable modal termφmay not be tractably computed. This is because that some subformu-las ofφmay not be tractable for forgetting. To remedy this, we impose further conditions on modal terms. We not only require the logically separable modal termφto be the small-est form, but also rsmall-estrict the propositional part ofφto be inL0, and every formula ofBi(φ)andDi(φ)to be the
dis-junction of formulas in this form.
Definition 3.2. A modal term φ is a separability-based term with L0 (STEL0), if it is of the syntactic form α∧
V
i∈B(iβi∧Vj♦iγij)s.t.
1. α∈ L0andB ⊆ A;
2. βi’s andγij’s are disjunctions ofSTEL0’s;
3. γij |=βifor anyiandj.
Dual to separability-based terms, it is natural to define separability-based clauses.
Definition 3.3. A modal clause φ is aseparability-based clause with L0 (SCLL0), if it is of the syntactic formα∨
W
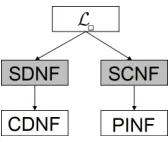
Figure 1: Succinctness of normal forms inKnandDn. An edge
L → L0means thatLis strictly more succinct thanL0. No edge betweenLandL0indicates that they are incomparable.
1. α∈ L0andB ⊆ A;
2. βi’s andγij’s are conjunctions ofSCLL0’s;
3. βi|=γijfor anyiandj.
We are ready to define separability-basedDNFandCNF.
Definition 3.4. A formula φ is in separability-based dis-junctive (resp. condis-junctive) normal form withL0(SDNFL0 (resp.SCNFL0)), ifφis a disjunction (resp. conjunction) of STEL0’s (resp.SCLL0’s).
We remark that the normal form SDNFTE is the form
SDNFof which propositional components are propositional terms (TE). The normal formSCNFCLare similarly defined.
It is easy to verify that two existing normal formsCDNFand
PINFare fragments ofSDNFTEandSCNFCLrespectively.
Proposition 3.4. CDNF⊂SDNFTEandPINF⊂SCNFCL.
Proof. In the definition of CDNF (Definition 2.2), each
τ ∧V
i∈BOiΦi is an STE since eachOiΦi is a shorthand
fori(Wφ∈Φiφ)∧
V
φ∈Φi♦iφ, and each formula inside the
modality♦ientailsWφ∈Φiφ. Thus,CDNFis a fragment of
SDNF.
In the definition of PINF(Definition 2.4), Condition 2-(c)-(ii) implies the condition of smallest logically separable modal clause representation. In addition, Conditions 2-(c)-(iii) and 2-(c)-(iv) correspond to Conditions 2 and 3 in Defi-nition 3.3, respectively. SoPINFis a fragment ofSCNF.
4
Expressiveness and Succinctness
In this section, we analyze spatial complexity of the four normal forms and compare them in terms of succinctness. Our main results include: (1) the sizes of the SDNF and
SCNF representations of a given formula φ are single-exponential in the size ofφ, and (2) we provide a full picture of the succinctness for the four normal formsSDNF,SCNF,
CDNFandPINF.
We first show that the transformations into SDNF and
SCNF cause a single-exponential blowup and this upper bound is optimal.
Proposition 4.1. AnyL-formulaφis equivalent to a for-mula in SDNFL0 (resp. SCNFL0) that is at most single-exponentially large in the size of φ. Moreover, there is an
L-formulaφs.t. the size ofSDNFL0(resp.SCNFL0) forφ is single-exponential in|φ|.
Proof. We provide a transformation forL into SDNFL0:
We first compile a modal formula into a CDNF formula
and then replace all propositional components with their equivalentL0-formulas. We note that every modal formula
is equivalent to a formula in CDNF that is at most single exponentially large in the original formula size (ten Cate et al. 2006). By Prop. 3.4,CDNF is a subset ofSDNFTE.
Thus, every modal formula can be equivalently transformed into a formula inSDNFTE. As each propositional term can
be turned into a polysizeL0-formula, we obtain the
single-exponential upper bound of the transformation.
Since SCNF is dual to SDNF, the transformation into
SCNFhas the same upper bound.
To prove that the upper bound is optimal, we observe that the smallestSDNFrepresentation for the formulaVn
j=1(pj∨
♦iqj)has at least2n modal terms, each of which is
equiv-alent to Vn
j=1rj where rj is either pj or ♦iqj. Dually,
Wn
j=1(pj∧iqj)has also at least2nmodal clauses.
By Theorem 4.1.13 in (Bienvenu 2009), the size of each
PINFformula equivalent toVn
j=1[(ipj∧♦iqj)∨(irj∧
♦isj)]is at least double-exponential large in the size of the
given formula. Therefore, our new normal forms have a bet-ter space complexity than PINF. We remark that, despite the worst case complexity is exponential, the transforma-tion can be performed effectively for some practical appli-cations. In particular, both progression and entailment check are tractable in SDNF for multi-agent epistemic planning, and thus the cost of compilation phase is amortized over subsequent progression and entailment. The details will be discussed in Section 6.
We now analyze the relationships between different nor-mal forms in terms of the succinctness.
Definition 4.1. A languageLisat least as succinct asL0, writtenL ≤ L0, if there is a polynomialf s.t. for any for-mulaφ∈ L0, there exists a formulaψ ∈ Ls.t.ψ ≡φand |ψ| ≤f(|φ|).
The relation≤is clear reflexive and transitive,i.e., a pre-order over languages. A languageLisstrictly more succinct thanL0, writtenL <L0, ifL ≤ L0andL0
L. Two
lan-guagesLandL0are incomparable, ifL
L0andL0L.
The results about succinctness are depicted in Figure 1. We explicate them in the following.
We note that SDNF and SCNF are subsets of L. By Proposition 4.1, L is strictly more succinct than both
SDNFandSCNF.
Proposition 4.2. L<SDNFL0 andL<SDNFL0.
We show that our new normal formsSDNFandSCNFare strictly more succinct thanCDNFandPINF, respectively.
Proposition 4.3. SDNFL0 <CDNFandSCNFL0 <PINF.
Proof. SinceCDNFandPINFare subsets ofSDNFTEand
SCNFCLrespectively (cf. Prop. 3.4) and every propositional
term and clause can be efficiently represented by L0, we
get that SDNFL0 ≤ CDNF and SCNFL0 ≤ PINF.
Ev-ery formula is equivalent to a SCNF-formula that is at most single-exponentially larger, and converting the formula
Vn
j=1[(ipj∧♦iqj)∨(irj∧♦isj)]intoPINFcauses an at
It remains to proveCDNFSDNFL0. We define a class
of formulasφk inductively as follows: (1)φ0 = p∨q; (2)
φk = φ0 ∧iφk−1. The size of φk is linear in k, more
precisely,3 + 5k. Letfbe a polynomial s.t. any clausechas a representation inL0with size at mostf(|c|). Eachφkhas
anSDNFL0representation with sizef(3)·(k+ 1) + 2k. The
smallestCDNFformulaψkequivalent toφkis(p∧iψk−1∧
♦iψk−1)∨(p∧i⊥)∨(q∧iψk−1∧♦iψk−1)∨(q∧i⊥). By
induction onk, the size ofψkis single-exponential ink.
As mentioned before, no formula inSDNF(resp.SCNF) equivalent to the formulaVn
j=1(pj∨♦iqj)(resp.W n j=1(pj∧
iqj)) has size polynomial in the given formula. Moreover,
the formulaVn
j=1(pj∨♦iqj)is inPINF. TheCDNFformula
Wn
j=1(pj∧iqj∧♦iqj)∨W n
j=1(pj∧i⊥)is equivalent to
Wn
j=1(pj∧iqj)and with polynomial size. Thus, we get
Proposition 4.4. SDNFL0PINFandSCNFL0 CDNF.
The remaining succinctness results shown in Figure 1 are easy consequences of Proposition 4.4 via exploiting the tran-sitivity of≤.
5
Queries and Transformations
In this section, we mainly examineSDNFL0w.r.t. the
knowl-edge compilation properties proposed in (Darwiche and Marquis 2002), and identify conditions ofL0under which
some useful properties hold inSDNFL0. More importantly,
we provide an almost complete picture for tractability of the four normal forms in Table 1. Interestingly, the normal formSDNFL0supports as many properties as propositional DNF. From the knowledge compilation perspective,SDNF
is a proper alternative to the modal counterpart forDNF.
Queries It is well-known that the satisfiability ofDNFis tractable (Darwiche and Marquis 2002). This positive result is still valid forSDNFL0ifL0allows polytime satisfiability
check. We briefly introduce the procedure for the satisfiabil-ity of anSDNFformulaφ. Suppose that we are given a poly-time subprocedure SATL0 which returns a Boolean value
stating whether or not anL0-formula is satisfiable. Ifφ ∈
L0, then it is satisfiable inKniff the subprocedureSATL0
returns yes. Ifφ is a disjunction of modal terms, then the satisfiability problem ofφcan be reduced to that of each dis-junctφ. Due to the modularity property (cf. Proposition 3.1), a logically separable modal termα∧V
i∈B(iβi∧Vj♦iγij)
is satisfiable iff all ofαandγij’s are satisfiable. In summary,
deciding if aSDNFformulaφis satisfiable can be tractably performed. Interestingly, even if the satisfiability of L0 is NP-Complete, the satisfiability ofSDNFL0 falls into∆
P
2
since the decision procedure calls the subprocedureSATL0
at most|φ|times.
Proposition 5.1. IfL0satisfiesCO, thenSDNFL0satisfies CO.
The negative results about other queries also carry for-ward fromDNFtoSDNF.
Proposition 5.2. SDNFL0 does not satisfyVA,SE,EQ, CEorIMunlessP=NP.
Proof. VA: Let τ1 ∨ · · · ∨ τn be a DNF where τk is a
propositional term. For each τk, there exists ψk ∈ L0 s.t.
ψk≡τkand|ψk|< f(|τk|)for some polynomialf. Clearly,
ψ1∨ · · · ∨ψnis inSDNFL0. If we can decide whether this
disjunction is valid in polytime, then the validity of DNF
can be tractably accomplished. However, the latter problem iscoNP-complete. A contradiction.
SEandEQ: SinceSEimpliesVA,SDNFL0 does not
satisfySE. Similarly,SDNFL0fails to satisfyEQ.
CEandIM: Letiφbe a modal literal whereφis
propo-sitional. Clearly,>is inSDNFL0andiφis a modal term.
We get that> |=iφiffφis valid. The validity problem of
propositional logic iscoNP-complete, and so is the prob-lem that decides if > |= iφ. Hence, SDNFL0 does not
satisfyCE. Similarly,SDNFL0fails to satisfyIM.
UnlikeDNF, even ifL0satisfies the polytime clause
en-tailment check (CE),SDNFL0does not possess such a
prop-erty. Moreover, it is impossible to propose a normal form permitting such a check. Let us illustrate this in the follow-ing. Suppose thatiφis a modal literal whereφis
propo-sitional. We get that > |= iφiffφis valid. The validity
problem of propositional logic iscoNP-complete, and so is the problem that decides if> |=iφ.
This motivates us to propose a restricted version of clausal entailment check by restricting the form of propositional subformulas appearing in the modal clausal.
Definition 5.1. A languageLsatisfiesCEL0 (resp.IML0),
if there is a polytime algorithm that maps every formulaφ∈ Land every SCLL0 (resp.STEL0)ψto1ifφ |= ψ(resp.
ψ|=φ) holds, and to0otherwise.
SDNFL0 supports the restricted polytime clausal
entail-ment check CEL0
0 under conditions that L0 satisfies both CO and ∧BC, and L0
0 is dual to L0. Let φ ∈ SDNFL0
andψ ∈ SCLL0
0. Due to the fact thatφ |= ψ iffφ∧ ¬ψ
is unsatisfiable, we reduce the clausal entailment problem to the satisfiability problem. The main insight is first construct-ing anSDNFL0 formulaφ
0equivalent toφ∧ ¬ψ, and then checking its satisfiability. This can be achieved by first ob-taining anSTEL0ψ
0equivalent to¬ψ, and then conjoining
ψ0 withφ. The facts thatSCLL0
0 andSTEL0 are dual and
thatSDNFL0 satisfies bounded conjunction (cf. Proposition
5.4) imply that the construction ofφ0 is tractable. Since the satisfiability ofSDNFis tractable (cf. Proposition 5.1), we get that deciding ifφ|=ψcan be accomplished in polytime. However,SDNFL0 does not satisfy the restricted polytime
implicant check even ifL0
0is dual toL0.
Proposition 5.3. Let L0 and L00 be dual. If L0 satisfies CO and ∧BC, then SDNFL0 satisfies CEL00. However, SDNFL0does not satisfyIML00unlessP=NP.
Proof. The proof for theCEL0property is illustrated above,
and the proof for theIML0property is similar to that for the IMproperty (cf. Proposition 5.2).
L CO VA SE EQ CE CEL0
0 IM IML00 ¬C ∧C ∧BC ∨C ∨BC CD FO SFO
SDNFL0 X
∗ ◦ ◦ ◦ ◦
X∗ ◦ ◦ 5 5 X∗ X X X∗ X∗ X∗
SCNFL0 ◦ X∗ ◦ ◦ ◦ ◦ ◦ X∗ 5 X X 5 X∗ X∗ ◦ ?
CDNF X ◦ ◦ ◦ ◦ X∗ ◦ ◦ 5 5 X X X X X X
PINF X X X X ◦ X∗ ◦ X∗ 5 5 5 5 X ? X X
Table 1: Queries and transformations for normal forms inKn andDn. The occurrence ofX(orX∗) in the cell of rowrand
columncmeans that “the normal formLrgiven in rowrsatisfies the propertyPcgiven in columnc(under specific conditions
in the case ofX∗)”. The symbol5means that “Lrdoes not satisfyPc”,◦means that “Lrdoes not satisfyPcunlessP=NP”,
and ? means that “the issue remains open”.
polytime negation. Fortunately, it supports bounded con-junction. The following proposition states the above results.
Proposition 5.4. • SDNFL0satisfies∨C, and does not sat-isfy∧Cor¬C.
• IfL0satisfies∧BC, thenSDNFL0satisfies∧BC.
Proof. • ∧C: By Proposition 4.1, anySDNFrepresentation ofφn =Vnj=1(pj∨♦iqj)has size exponential inn. But
the size ofφnis linear inn. Hence,∧Cdoes not hold for
SDNFL0.
• ¬C: On the contrary, assume thatSDNFL0 satisfies¬C.
This, together with the fact that∨Cholds forSDNFL0,
imply thatSDNFL0satisfy∧C, a contradiction.
• ∧BC: By assumption, there exists a polytime algorithm that maps every pair ofL0-formulasαandα0 to anL0
-formula that is equivalent toα∧α0. Let the polynomialf
be the time complexity,kthe degree off, andcthe sum of the coefficients off. Sof(|α|,|α0|)≤c|α|k|α0|k.
Suppose thatφ=Wn
j=1ψjandφ0 =W m
l=1ψ0lare two
for-mulas inSDNFL0. Thus, anyψjandψ
0
lare inSTEL0. We
can construct a formulaφ00inSDNF
L0that is equivalent
toφ∧φ0 by simply taking the disjunction of all modal terms ψ00jl whereψjl00 ≡ ψj ∧ψl0 for 1 ≤ j ≤ n and
1 ≤ l ≤ m. It is easy to see that |φ00| ≤ c|φ|k|φ0|k if
|ψ00jl| ≤c|ψj|k|ψl0| k.
It remains to prove that for any twoSTE’sψandψ0, there is anSTEψ00s.t. ψ00 ≡ψ∧ψ0 and|ψ00| ≤ c|ψ|k|ψ0|k.
Suppose thatψ = α∧V
i∈B(iβi∧V mi
j=1♦iγij)and
ψ0 =α0∧V
i∈B0(iβi0∧
Vni
l=1♦iγil0). We assume without
loss of generality thatB = B0. We construct a formula
ψ00=α00∧V
i∈B(iβ00i∧
Vmi
j=1♦iγ
00
ij∧
Vni
l=1♦iγ
∗
il), where
α00 ≡ α∧α0,β00i ≡ βi∧βi0,γij00 ≡βi0∧γij andγil∗ ≡
βi∧γil0. Thenψ00is anSTEwith size at mostc|ψ| k|ψ0|k.
It is easy to design procedures for generating the results of conditioning and forgetting ofSDNFformulas respectively. They are similar to the procedure for the satisfiability prob-lem ofSDNFformulas. Thus, we get
Proposition 5.5. IfL0satisfiesCD(resp.FO/SFO), then SDNFL0 satisfiesCD(resp.FO/SFO).
SinceSCNFis dual toSDNF, it is similar to obtain cor-responding results for SCNFL0. CDNF supports as many
knowledge compilation properties asSDNFon the ground
that it is a fragment ofSDNFTEand propositional term
satis-fies the specific conditions. Most results forPINFpresented in this section originate from (Darwiche and Marquis 2002; Bienvenu 2009). Table 1 summarizes the query and transfor-mation properties of the four normal form.
We conclude this section by briefly discussing our main results. Given a proper propositional fragmentL0,SDNFL0
is tractable for all of queries and transformations thatDNF
admits, and thus being a proper alternative to the modal counterpart for DNF. For the similar reason, SCNF and
PINFcan be viewed as the modal counterpart forCNFand prime implicate, respectively. It is worth noting thatSDNF
supports ploytime clausal entailment checking (CEL0),
bounded conjunction (∧BC) and forgetting (FO), which are important for multi-agent epistemic planning. SCNF
does not satisfy polytime entailment check or forgetting while bounded conjunction does not hold forPINF. Though
CDNFsatisfy all ofCEL0,∧BCandFO,SDNFhas two
major advantages overCDNF. In theory, it is strictly more succinct thanCDNF(cf. Proposition. 4.3). On the practice side,SDNFis more flexible thenCDNFsince the former can be designed via making use of efficient and compact propo-sitional representations, e.g., OBDD. From the knowledge compilation perspective,SDNFis more suitable for multi-agent epistemic planning than the other three normal forms.
6
Application to Multi-Agent Epistemic
Planning
Based on the notion of canonical formulas, Aucher (2011) gave a syntactic representation of progression w.r.t. epis-temic actions. Due to the high complexity of their canonical formulas, this approach is not practical for implementation of multi-agent epistemic planning. Bienvenu, Fargier, and Marquis (2010) proposed a tractable approach to progres-sion and entailment check for single-agent epistemic plan-ning. It is challenging to extend their approach to multi-agent case in that it is necessary to consider not only first-order knowledge (i.e., to know what is the world), but also high-order knowledge, (i.e., to know what other agents know).
In this section, we briefly explain how to apply our results in multi-agent epistemic planning. Especially, two essential procedures (progression and entailment check) can be ac-complished efficiently by using the formSDNF.
The main distinction between epistemic planning and tradi-tional planning are that (1) the initial KB and the goal for-mula are expressed in modal logics other than propositional logics, and (2) the former involves not only ontic actions changing the world but also epistemic actions modifying the mental attitude of agents. We begin with a multi-agent epis-temic planning problem adapted from (Kominis and Geffner 2015) to explain the progression and entailment check.
Example 3. There are four roomsr1,r2,r3andr4in a row from left to right on a corridor. Each of two boxesb1andb2 is located in a room. Two agentsiandjcan move from one room to its left and right adjacent room. When an agent is in a room, she can sense if a box is in the room. Initially, agent
iis inr1,jis inr4, boxb1is inr2andb2is inr3. Each agent only knows where herself is (i.e.,iat(i, r1)∧jat(j, r4)). The goals for agentsiandj are to determine the rooms in whichb1andb2respectively.
In the following, we discuss the progression w.r.t. ontic and epistemic actions.
An ontic actionaois associated with a pair of functions
hpre, effiwherepre ∈ L specifies the precondition and
eff is the effect. In order to express the effect, we con-sider two versions p andp0 of each variable p. For each
p ∈ P, the unprimed versionpmeans thatpholds before performing the actionao, and the primed onep0states that
pholds after. The effect is a conjunction of formulas of the form: p0 ≡ δ+ ∨(p∧ ¬δ−). Two propositional formulas
δ+andδ−are conditions that makeptrue and false respec-tively. Intuitively, the effect means that pholds after exe-cuting ao iff δ+ holds, or δ− does not hold and pholds
initially. In Example 3, if agenti knows that she is not in the rightmost room r4, then she can move right, and thus
pre(right(i)) =i(¬at(i, r4)); after moving right, agenti
will be in roomrn+1if she is inrninitially, and therefore
eff(right(i)) =V3
n=1[at
0(i, r
n+1)≡at(i, rn)].
In this paper, we assume that all ontic actions are public and that there is no sort of imperfect information in them. This assumption was proposed in (Kominis and Geffner 2015). To exactly capture progression under this assump-tion, it is necessary to progress KBs according to the action effect via high-order knowledge shared by all agents.
Definition 6.1. Letkbe a natural number andφa formula. The formulakφis inductively defined:
• 1φ=V
i∈Aiφ;
• kφ=
k−1φ∧V
i∈Ai(k−1φ).
Intuitively, 1φ means that every agent knows that φ
holds, i.e.,φ is the everyone knowledge; and kφ means
thatφis the depthkeveryone knowledge.
The computation of the progressionξof the KBφw.r.t. an ontic actionaoinvolves three steps:
1. Construct the formulaψby conjoiningφwith the depth
keveryone knowledge about the effect ofaowherekis
the depth ofφ(i.e.,ψ=φ∧keff(a o)).
2. Obtain the formulaηvia forgetting the set of variablesQ
inψwhereQis the set of unprimed variables appearing ineff(ao)(i.e.,η =∃Q.ψ).
3. Replace each occurrence of primed variables with their unprimed counterpart inη(i.e.,ξ=η[P0/P]).
By expressing the initial KB and the action effects of on-tic actions inSDNFL0withL0satisfying polytime bounded
conjunction (∧BC) and forgetting (FO), which is always possible due to Propositions 4.1, the above three steps can be accomplished in polytime, and thus the progression w.r.t. ontic actions can be tractably computed.
The progression of epistemic actions is relatively simple. An epistemic action aeis associated with a triple of
func-tions hpre, pos, negi of L-formulas, where pre, posand
neg indicate the precondition, positive and negative sens-ing results, respectively. For example, consider the action
sense(i, b1, r2)which means that agentisense if boxb1in
roomr2, its precondition, positive and negative sensing
re-sults are as follows:pre(sense(i, b1, r2)) =iat(i, r2),
pos(sense(i,b1,r2)) =iin(b1,r2)andneg(sense(i,b1,r2)) = i¬in(b1, r2). The computation of the progression is
done via firstly making two copies ofφ, and then conjoin-ing them with positive and negative results respectively,i.e.,
φ∧pos(ae)andφ∧neg(ae). Again,SDNFis suitable to
perform such progression since it supports polytime∧BC. Continued with Example 3, we illustrate the computation of progression.
Example 4. Suppose that agentifirst moves right, and then senses whetherb1in roomr2.
The progression of the initial KB φ = iat(i, r1) ∧
jat(j, r4)w.r.t. the ontic actionright(i)is obtained as fol-lows:
1. Conjoinφwith1eff(ao), and the resulting formulaψ
isiat(i, r1)∧jat(j, r4)∧1[V 3
n=1(at
0(i, r
n+1)≡
at(i, rn))];
2. The set of unprimed variables appearing ineff(ao)is
{at(i, r1), at(i, r2), at(i, r3)}. Forgetting them inψ re-sults in the formulaη=iat0(i, r2)∧jat(j, r4); 3. Substituteat0(i, r2)withat(i, r2)inη, leading toξ =
iat(i, r2)∧jat(j, r4).
After agentimoves right, she knows that her position isr2. Then, the progression w.r.t. sense(i, b1, r2)splitsξ into the two KBs: i[at(i, r2)∧in(b1, r2)]∧jat(j, r4) and
i[at(i, r2)∧¬in(b1, r2)]∧jat(j, r4). These two formulas together means that agentiknows whetherb2is inr2.
Besides progression, another major computation effort lies in the reasoning to decide if the current KB entails the goal formula and the action preconditions. It follows from Proposition 5.3 that the entailment check is tractable if the current KB is expressed inSDNFL0 and both the goal
for-mula and the preconditions are inSCNFL0
0, whereL0and
L0
0are dual, andL0satisfiesCOand∧BC. Thanks to the
tractability of both progression and entailment check, the whole planning process can be done effectively.
7
Extension to
D
n,
K45
nand
KD45
nL CO VA SE EQ CE ACEL0
0 IM AIML00 ¬C ∧C ∧BC ∨C ∨BC CD FO SFO
ASDNFL0 X
∗ ◦ ◦ ◦ ◦
X∗ ◦ ◦ 5 5 X∗ X X X∗ X∗ X∗
ASCNFL0 ◦ X∗ ◦ ◦ ◦ ◦ ◦ X∗ 5 X X 5 X∗ X∗ ◦ ?
ACDNF X ◦ ◦ ◦ ◦ X∗ ◦ ◦ 5 5 X X X X X X
Table 2: Queries and transformations for normal forms inK45nandKD45n
Figure 2: Succinctness of normal forms inK45nandKD45n.
can be captured by the consistency axiomD(¬i⊥) while
the latter can be described as the introspection axioms 4
(iφ→iiφ) and5(♦iφ→i♦iφ).
In this section, we are concerned about modal logicsDn,
K45nandKD45nthat are extensions toKn. The logicDnis
Knextended by the axiomD,K45nis the logic that extends
Knwith axioms4and5, andKD45nis the modal logic
con-taining the above three axioms.
Let us begin with the Dn case. Both SDNF and SCNF
previously defined (cf. Def. 3.4) are suitable toDn. This is
because that the knowledge compilation results about these two forms (cf. Fig. 1 and Tab. 1) still hold forDn, and thus
SDNFandSCNFsupport as many queries and transforma-tions as propositionalDNFandCNFrespectively.
Theorem 7.1. The results in Fig. 1 and Tab. 1 hold forDn.
Proof. The proofs of results aboutKnin Figure 1 and Table
1 are applicable to the logicDnexcept the following
state-ments:
1. IfL0satisfiesCO, thenSDNFL0satisfiesCO.
2. IfL0satisfiesVA, thenSCNFL0satisfiesVA.
SinceSDNFandSCNFare dual, the above two statements are equivalent. It suffices to prove the first statement. The proof is similar to that of Proposition 5.1 except the case for a logically separable modal termα∧V
i∈B(iβi∧Vj♦iγij).
It is satisfiable iff non only the formulasαandγij’s but also
βi’s are satisfiable.
Now, we turn to consider the logicK45n. It is non-trivial
to extend our proposed results forKntoK45nsince the
defi-nition of separability-based term cannot be applied inK45n.
We show this in an illustrative example.
Example 5. Suppose that a logical separable modal term
φ = ♦i(p∧i¬p). By Proposition 3.1,φis satisfiable in
Kn. However, it is not the case inK45nsinceφimplies that
♦i(p∧ ¬p), which is equivalent to⊥. This is due to the
ad-ditional axioms4and5.
From the above example, we know that, in K45n, there
exist logical entanglements between two propositional sub-formulas on different depth of sub-formulas. Thus, the crux is
that some separability-based terms are logically inseparable inK45n. To achieve logical separability, we need to prohibit
any consecutive occurrence of modalities of the same agent.
Definition 7.1. A formula hasthe alternating agent modal-ity propertyif no modalities of an agent directly occur inside those of the same agent.
We say φ is an alternating separability-based term (ASTE), if it is anSTE with the alternating agent modal-ity property. Similarly, we can define the following no-tions: alternating separability-based clause (ASCL),DNF (ASDNF) and CNF (ASCNF). In addition, the alternating version ofCDNF(ACDNF) was proposed in (Hales, French, and Davies 2012). For example, the formulai♦ipis not an
ASTEsince♦ioccurs directly within theimodality. But
the formulai♦jipis anASTEsince there is a♦j
modal-ity inbetween twoimodalities.
We remark that all knowledge compilation results, stated in Sec. 4 and 5, also hold forASDNF,ASCNFandACDNF
in the logicK45nexcept the following. Firstly, transforming
intoASDNForASCNFcauses an at most double exponen-tial blowup in the size of the original formula since strip-ing out any occurrence of consecutive modalities with the same agent leads to an extra single-exponential blowup. Al-though the aforementioned transformation for arbitrary for-mulas may cause a double-exponential blowup, its complex-ity falls into single-exponential if the original formula pos-sesses the alternating agent modality property. In addition, the definitions of polytime tests for restricted clausal en-tailment (ACEL0) and implicant (AIML0) are slightly
ad-justed by usingASTEandASCLinstead ofSTEandSCL re-spectively. Similar to Prop. 5.3, ifL0andL00are dual andL0
supportsCOand∧BC, thenASDNFL0satisfiesACEL00.
The above knowledge compilation results for K45n are
also hold forKD45n. We summarize them in Figure 2 and
Table 2. The meaning of symbols in Figure 2 and Table 2 are the same as Figure 1 and Table 1 respectively.
Theorem 7.2. The results in Figure 2 and Table 2 hold for K45nandKD45n.
To prove Theorem 7.2, we need the following lemma. We use|=Lto denote the entailment relation in the logicL.
Lemma 7.1. For every alternating formulaφ,φis satisfi-able inKniff it is satisfiable inK45n.
Proof. By Lemma 5 in (Lakemeyer and Lesp´erance 2012), we have⊥ |=Kn φiff⊥ |=K45n φ. It follows thatφis satisfi-able inKniff it is satisfiable inK45n.
We are ready to present the proof of Theorem 7.2.
with depth1, and alternating formulas. Hence, the succinct-ness results aboutKnare applicable toK45nandKD45n. For
a similar reason, the negative results on queries and transfor-mations forKnalso hold forK45nandKD45n.
The positive result on queries forK45nandKD45n can
be proved using Lemma 7.1. By Proposition 5.1 and Lemma 7.1,ASDNFL0 supports polytime satisfiability check (CO)
ifL0supportsCO. Similarly,ASDNFL0 satisfies polytime
test for restricted clausal entailment (ACEL0
0) under
spe-cific conditions.
It is easy to see thatSDNF supports polytime arbitrary disjunction (∨C) and bounded conjunction (∧BC). Finally, the computation of forgetting and conditioning preserves the alternating agent modality property. Hence,ASDNFL0
sup-ports polytime forgetting (FO) and conditioning (CD). SinceSCNFis dual toSDNF, it is similar to obtain cor-responding results for SCNFL0. CDNF supports as many
queries and transformations asSDNFon the ground that it is a fragment ofSDNFTEand propositional term satisfies the
specific conditions.
8
Conclusions and Future Work
We have introduced a notion of logical separability for modal terms, which is a key property to guarantee that the satisfiability check and forgetting can be computed in a modular way. Based on the logical separability, we have defined a normal form SDNF for the multi-agent modal logic Kn, which can be seen as a generalization of the
well-known propositional normal formDNF. As a dual to
SDNF, we can define theSCNFforKn. More importantly,
we have constructed a knowledge compilation map on four normal forms SDNF, SCNF, CDNF and PINF in terms of their succinctness, queries and transformations. Interest-ingly, bounded conjunction, forgetting and restricted clausal entailment check are all tractable forSDNFL0 formulas
un-der some restrictions onL0. These three properties are
cru-cial to effective implementations of multi-agent epistemic planning. AlthoughSDNFandCDNFadmit tractability for the same queries and transformations, the former is a bet-ter choice of the target compilation language for multi-agent epistemic planning sinceSDNFis more succinct and flexible thanCDNF. Finally, we extend the above results to modal logicsDn,K45nandKD45n.
For future work, we plan to implement a multi-agent epis-temic planner based onSDNF. It is also interesting to iden-tify tractable normal forms in other multi-agent modal log-ics (e.g.,TnandS5n) and expressive description logics (e.g.,
ALCO andALCOI). Since the description logicALC is highly-related to Kn, the results proposed in this paper is
also applicable toALC.
9
Acknowledgments
We are grateful to Yongmei Liu, Dacheng Wen and Fang Lv for their helpful discussions on the paper. This work was supported by the Natural Science Foundation of China (Nos. 61603152, 61463044, 61703182, 61772232 and 61773179) and Guangxi Key Laboratory of Trusted Software project
(Nos. kx201604 and kx201606). Liangda Fang and Xim-ing Wen are also affiliated to Guangxi Key Laboratory of Trusted Software, Guilin University of Electronic Technol-ogy, Guilin, China. This work was partly supported by Aus-tralian Research Council (ARC) under DP130102302.
References
Aucher, G. 2011. DEL-sequents for progression.Journal of Applied Non-Classical Logics21(3-4):289–321.
Bienvenu, M.; Fargier, H.; and Marquis, P. 2010. Knowledge Compilation in the Modal Logic S5. InAAAI, 261–266. Bienvenu, M. 2008. Prime Implicate Normal Form forALC Concepts. InAAAI, 412–417.
Bienvenu, M. 2009. Consequence Finding in Modal Logic. Ph.D. Dissertation, Universit´e de Toulouse.
Bryce, D.; Kambhampati, S.; and Smith, D. E. 2006. Plan-ning Graph Heuristics for Belief Space Search. Journal of Artificial Intelligence Research26:35–99.
Darwiche, A., and Marquis, P. 2002. A Knowledge Com-pilation Map. Journal of Artificial Intelligence Research
17:229–264.
Fang, L.; Liu, Y.; and van Ditmarsch, H. 2016. Forgetting in Multi-Agent Modal Logics. InIJCAI, 1066–1073. French, T. N. 2006. Bisimulation Quantifiers for Modal Logics. Ph.D. Dissertation, University of Western Australia. Hales, J.; French, T.; and Davies, R. 2012. Refinement Quantified Logics of Knowledge and Belief for Multiple Agents. InAiML, 317–338.
Halpern, J. Y., and Moses, Y. 1992. A guide to completeness and complexity for modal logics of knowledge and belief.
Artificial Intelligence54:319–379.
Huang, X.; Fang, B.; Wan, H.; and Liu, Y. 2017. A Gen-eral Multi-agent Epistemic Planner Based on Higher-order Belief Change. InIJCAI, 3327–3334.
Kominis, F., and Geffner, H. 2015. Beliefs in Multiagent Planning: From One Agent to Many. InICAPS, 147–155. Lakemeyer, G., and Lesp´erance, Y. 2012. Efficient Reason-ing in Multiagent Epistemic Logics. InECAI, 498–503. Levesque, H. 1998. A Completeness Result for Reasoning with Incomplete First-Order Knowledge Bases. InKR, 14– 23.
Moss, L. S. 2007. Finite models constructed from canonical formulas.Journal of Philosophical Logic36(6):605–640. ten Cate, B.; Conradie, W.; Marx, M.; and Venema, Y. 2006. Definitorially Complete Description Logics. InKR, 79–89. To, S. T.; Pontelli, E.; and Son, T. C. 2011. On the Ef-fectiveness of CNF and DNF Representations in Contingent Planning. InIJCAI, 2033–2038.