ABSTRACT
PICKLES, JOSHUA DAVID. Sharp-Fin Induced Shock Wave/Turbulent Boundary Layer Interactions over a Cylindrical Surface. (Under the direction of Venkateswaran Narayana-swamy and Pramod Subbareddy.)
Interactions between an oblique shock wave generated by a sharp fin placed on a
cylindrical surface and the incoming boundary layer are investigated to unravel the mean
features of the resulting shock/boundary layer interaction (SBLI) unit. It is the goal of this
dissertation to establish the mean response of a fin-on-cylinder SBLI in both unperturbed
and perturbed incoming boundary layer conditions, and to investigate whether the
non-linear actions between a shock wave and perturbed incoming boundary layer can be used
to engender control forces required for improved maneuverability and vehicle performance.
This fin-on-cylinder SBLI unit has several unique features caused by the 3-D relief offered
by the cylindrical surface that noticeably alter the shock structure.
Complementary experimental and computational studies are made to delineate both
the surface and off-body flow features of the fin-on-cylinder SBLI unit and to obtain a
detailed understanding of the mechanisms that dictate the mean flow and wall pressure
features of the SBLI unit. Results show that the fin-on-cylinder SBLI exhibits substantial
deviation from quasi-conical symmetry that is observed in planar fin SBLI. Furthermore,
the separated flow growth rate appears to decrease with downstream distance and the
separation size is consistently smaller than the planar fin SBLI with the same inflow and
fin configurations. The causes for the observed diminution of the separated flow and its
downstream growth rate were investigated in the light of changes caused by the cylinder
curvature on the inviscid as well as separation shock. It was found that the inviscid shock
gets progressively weakened in the region close to the triple point with downstream distance
due to the 3D relief effect from cylinder curvature. This weakening of the inviscid shock
feeds into the separation shock, which is also independently impacted by the 3D relief, to
Having established the baseline (unperturbed) flow response, well-quantified
distor-tions are generated via micro-ramp vortex generators (VG) to embed strong streamwise
vortices into the boundary layer. These VGs are 1.0 and 0.6 incoming boundary layer
thick-nesses tall, and their geometries are configured for maximum distortion strength. The
analog control forces and moments are determined using the mean surface pressure field
for different VGs placed at different azimuthal locations with respect to the fin leading edge.
These configurations resulted in up to 23%, 22% and 5% change in the fin-normal force,
rolling and pitching moments, respectively, compared to the unperturbed results. The
im-pact on the control moments provides compelling evidence that perturbing the boundary
layer and exploiting the associated fin-generated shock boundary layer interactions is a
viable strategy to enable high maneuverability in munitions via dramatic changes in the
© Copyright 2019 by Joshua David Pickles
Sharp-Fin Induced Shock Wave/Turbulent Boundary Layer Interactions over a Cylindrical Surface
by
Joshua David Pickles
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Aerospace Engineering
Raleigh, North Carolina
2019
APPROVED BY:
Jack Edwards Kenneth Granlund
Venkateswaran Narayanaswamy Co-chair of Advisory Committee
DEDICATION
BIOGRAPHY
Joshua Pickles, born and raised in Raleigh, North Carolina, attended North Carolina State
University for his undergraduate and graduate academic careers. He obtained is Bachelor’s
Degree in Aerospace Engineering in 2015, and immediately continued into graduate school
under the co-advisement of Drs. Venkat Narayanaswamy and Pramod Subbareddy. While
working as a research assistant under Dr. Narayanaswamy on investigating the effect of
3-D relief on sharp-fin induced shock wave/boundary layer interactions, Joshua received is
Master’s Degree in 2019 in Aerospace Engineering and continued on the same program to
ACKNOWLEDGEMENTS
To my advisor, Dr. Venkat Narayanaswamy, thank you for the opportunity and guidance
that has allowed me to develop the skillset of a professional engineer and researcher in
fluid dynamics. Further, I wish to thank my Ph.D. committee Drs. Pramod Subbareddy, Jack
Edwards, and Kenneth Granlund for their direction and assistance in my research and their
classes. Thank you to the other graduate faculty and specialty trade technicians, without
whom this work would not have been possible. To my friends and colleagues who I have had
the pleasure to meet over the years: Thank you for your support and the laughs, especially
during the late nights in the lab. This process would have been much less enjoyable without
you. I specifically wish to thank my colleague Bala Mettu, and Ben Kirschmeier and his
advisor Dr. Matthew Bryant for their assistance in performing the CFD presented in this
work and in 3-D printing the vortex generators, respectively. To my parents and my brother,
who never stopped believing in me and provided me with support when I needed it the
most. Thank you for the opportunity and instilling in me the desire and work ethic to
push myself. Finally, I wish to thank Dr. Matthew Munson and the Army Research Office
for providing the financial support under grant W911NF-16-1-0072 that made this work
TABLE OF CONTENTS
LIST OF TABLES . . . viii
LIST OF FIGURES. . . ix
Chapter 1 INTRODUCTION. . . 1
1.1 Motivation and Goals . . . 1
1.2 Literature Review . . . 3
1.2.1 Review of the Flowfield Past a Sharp Fin . . . 3
1.2.2 Planar Laser Scattering . . . 7
1.2.3 Axisymmetric Geometries with a Sharp Fin . . . 10
1.2.4 Perturbed Sharp Fin SBLI . . . 11
1.3 Technical Approach . . . 13
1.4 Problem Context . . . 13
1.5 Overview of Dissertation . . . 15
1.6 Published Works . . . 16
1.6.1 Journal Papers . . . 16
1.6.2 Conference Papers . . . 16
Chapter 2 INVESTIGATION METHODS . . . 18
2.1 Experimental Approach . . . 18
2.1.1 Wind Tunnel Facility . . . 18
2.1.2 Models . . . 19
2.1.3 Freestream Conditions . . . 21
2.1.4 Measurement Techniques . . . 22
2.2 Computational Approach . . . 27
Chapter 3 GAS DENSITY FIELD IMAGING IN SHOCK DOMINATED FLOWS US-ING PLANAR LASER SCATTERUS-ING. . . 30
3.1 Introduction . . . 30
3.2 Theory of PLS-Based Density Imaging . . . 31
3.3 Investigation Setup . . . 36
3.3.1 Experimental Setup . . . 36
3.3.2 Computational Setup . . . 39
3.4 Calibration . . . 41
3.5 Results and Discussion . . . 45
3.6 Uncertainty Analysis . . . 54
3.7 Summary . . . 60
Chapter 4 INVESTIGATION OF SURFACE CURVATURE EFFECTS ON UNSEPA-RATED FIN SHOCK WAVE/BOUNDARY LAYER INTERACTIONS. . . 62
4.1 Introduction . . . 63
4.2 Investigative Approach . . . 63
4.2.2 Computational Approach . . . 68
4.3 Results and Discussion . . . 69
4.3.1 Surface Streaklines . . . 69
4.3.2 Pressure Imaging . . . 70
4.3.3 Planar Laser Scattering . . . 73
4.3.4 Comparison to Computations . . . 76
4.4 Summary . . . 80
Chapter 5 MEAN STRUCTURE OF SEPARATED SHARP-FIN INDUCED SHOCK WAVE/TURBULENT BOUNDARY LAYER INTERACTIONS OVER A CYLIN-DRICAL SURFACE. . . 83
5.1 Introduction . . . 84
5.2 Experimental and Computational Setup . . . 84
5.2.1 Experimental Approach . . . 84
5.2.2 Surface Streakline Visualization . . . 86
5.2.3 Planar Laser Scattering . . . 87
5.2.4 Mean Pressure Imaging . . . 89
5.2.5 Computational Approach . . . 89
5.3 Results . . . 91
5.3.1 Identification of Flow Regimes . . . 91
5.3.2 Separation Locus Evolution of Fin-on-Cylinder SBLI . . . 95
5.3.3 Mean surface pressure field . . . 98
5.3.4 Off-Body SBLI Shock/Flowfield Structure . . . 102
5.4 Discussion . . . 109
5.4.1 Separation Regimes in Fin-on-Cylinder SBLI . . . 109
5.4.2 Inviscid Fin-on-Cylinder Shock Structure . . . 110
5.4.3 Boundary Layer Response to the Modified Inviscid Shock . . . 114
5.4.4 Influence of Finite Fin Height . . . 117
5.4.5 Comments on Downstream Evolution of Fin-on-Cylinder SBLI vs. Planar Fin SBLI . . . 121
5.4.6 Influence of the Wind Tunnel Boundary Layer on the Separation Topology . . . 123
5.5 Summary . . . 125
Chapter 6 ACHIEVING HIGH MANEUVERABILITY AND PRECISION IN MUNI-TIONS USING NON-LINEAR FLOW INTERACMUNI-TIONS. . . 128
6.1 Introduction . . . 128
6.2 Experimental Approach . . . 129
6.2.1 Surface Streakline Visualization . . . 131
6.2.2 Planar Laser Scattering . . . 131
6.2.3 Mean Pressure Imaging . . . 132
6.2.4 Particle Image Velocimetry . . . 133
6.3 Inflow Quantification . . . 133
6.4 Results . . . 134
6.5.1 Flowfield Generated by the Vortex Generators . . . 138
6.5.2 Surface Flow . . . 139
6.5.3 Off-Body Flow . . . 142
6.5.4 Interaction Mechanisms . . . 144
6.6 Summary . . . 153
Chapter 7 SUMMARY AND FUTURE WORK . . . 155
7.1 Summary of Research . . . 155
7.2 Recommendations for Future Work . . . 159
BIBLIOGRAPHY . . . 161
APPENDICES . . . 170
Appendix A MODEL DRAWINGS . . . 171
A.1 Vortex Generators . . . 171
A.1.1 3.6 mm tall VG (60%δ99) . . . 171
A.1.2 6 mm tall VG (100%δ99) . . . 172
A.2 20◦Fin . . . 173
A.3 50 mm Outer Diameter Half Cylinder . . . 174
A.4 Cylinder-VG-Fin Assembly . . . 175
Appendix B RESOURCES . . . 177
B.1 MATLAB-to-Tecplot . . . 177
B.2 DaVis-to-Tecplot . . . 179
LIST OF TABLES
Table 2.1 Incoming flow and boundary layer characteristics . . . 21
Table 4.1 Freestream values and characteristics of the incoming boundary layer. 65
Table 5.1 Incoming flow and boundary layer characteristics . . . 86 Table 5.2 Comparison of the theoretical predictions of the plateau wall
pres-sure between S1 and S2 with experimental values at different stream-wise locations of fin-on-cylinder SBLI. . . 114
LIST OF FIGURES
Figure 1.1 Sketch ofλ-shock structure: (a) streamwise and (b) top views, based on[Alv92]. . . 7 Figure 1.2 Illustration of fundamental modifications to the inviscid shock
struc-ture generated in a fin-on-cylinder configuration. . . 14
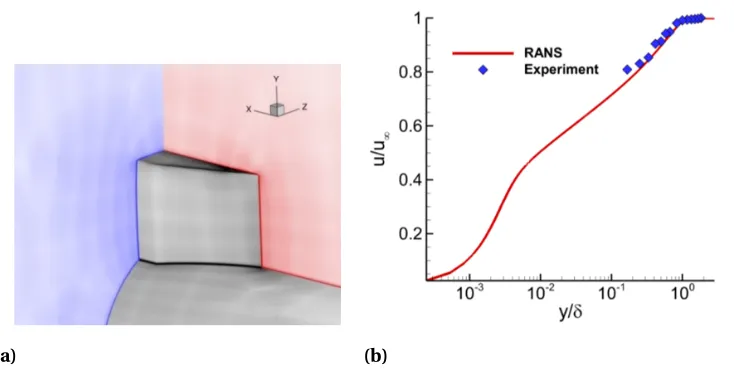
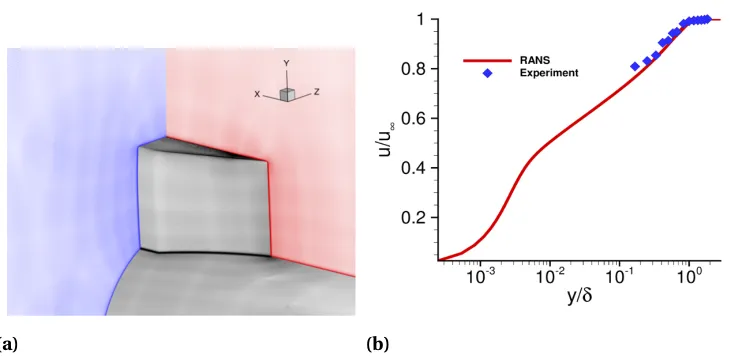
Figure 2.1 Representation of the (a) fin-on-cylinder and (b) planar fin models used in the experimental investigations. . . 20 Figure 2.2 PLS schematic. . . 25 Figure 2.3 (a) Illustration of the grid generated for the Euler and RANS
simu-lations used in this study. (b) Boundary layer profile comparison between the RANS and the experiment. . . 28
Figure 3.1 Schematic of the fin-on-cylinder configuration. . . 37 Figure 3.2 Schematic of the SBLI configuration and the PLS setup used for the
experiments. . . 39 Figure 3.3 a) Overlay of the grid cross-section with the line contour plot for
density at 20 mm (x/R=0.8) from the fin leading edge. b) Boundary layer profile comparison between the RANS and the experiment. . . 40 Figure 3.4 PLS calibration Schematic. . . 41 Figure 3.5 PLS calibration data obtained in the present study along with a cubic
polynomial fit and the comparison of the corresponding computed values of silicone oil droplets using the de-agglomeration data of [Bra87]. . . 42 Figure 3.6 A representative instantaneous PLS field after background
subtrac-tion and laser sheet correcsubtrac-tion obtained at x/R=1.0. The flow direc-tion is into the page. . . 46 Figure 3.7 Ensemble averaged freestream normalized PLS images at different
streamwise locations: a) x/R=0.4, b) x/R=0.8 and c) x/R=1.0. Flow is into the page. . . 48 Figure 3.8 R.M.S. freestream normalized PLS fields at different streamwise
locations: a) x/R=0.4, b) x/R=0.8 and c) x/R=1.0. The regions of high r.m.s. values are observed along the shock structure, shear layers, and boundary layers. Flow is into the page. . . 48 Figure 3.9 Side-by-side comparison of the density field obtained using
cali-brated PLS technique (left half ) and the corresponding computed density field from RANS (right half ). Identical color maps were used on both fields to facilitate quantitative comparison of the experi-mental and computational fields. . . 50 Figure 3.10 Instantaneous and mean profiles of gas density across different
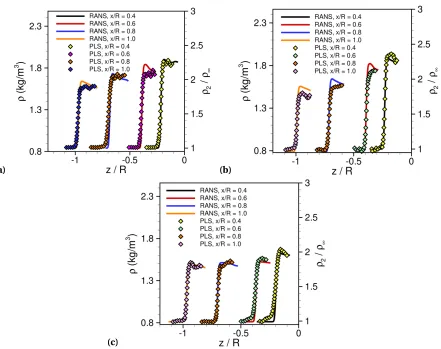
Figure 3.11 Comparison of mean gas density profiles from experiments and RANS simulations across the separation and reattachment shocks obtained at different heights from the cylinder surface. The profiles were obtained at x/R=1.0. . . 54 Figure 3.12 P.D.F. of the experimental density field r.m.s. obtained downstream
of the inviscid shock region between y/R=0.4-0.8 at two different streamwise locations: a) x/R=0.6, and b) x/R=1.0. . . 55 Figure 3.13 Conditionally averaged mean density values downstream of the
inviscid shock, conditioned on the freestream signal counts, at two different streamwise locations: a) x/R=0.6, and b) x/R=1.0. The density data were sampled across y/R=0.4-0.5. . . 58
Figure 4.1 Representation of the (a) fin-on-cylinder and (b) planar fin models used in the experimental investigations. . . 64 Figure 4.2 PLS schematic. . . 67 Figure 4.3 Surface streakline visualization of a 50 mm tall fin on (a) 50 mm
cylinder, and (b) flat plate at Mach 2.5. The black dashed lines are the loci of the first noticeable pressure rise in the surface pressure field obtained from figure 4.4. The dash-dot line is the theoretical location of the inviscid shock. . . 70 Figure 4.4 Unwrapped mean surface pressure field of the (a) fin-on-cylinder
SBLI and (b) planar SBLI. The black dashed line denotes the blue/ -green interface loci that corresponds to the first noticeable surface pressure rise from the SBLI. The dash-dot line is the theoretical location of the invisicd shock. . . 71 Figure 4.5 Freestream-normalized mean wall static pressure profiles. Figure
(a): fin-on-cylinder SBLI, and (b): planar SBLI. . . 73 Figure 4.6 Ensemble-averaged freestream-normalized PLS images at different
streamwise locations: (a)x=20 mm, fin-on-cylinder; (b)x=30 mm, fin-on-cylinder; (c) x =40 mm, fin-on-cylinder; (d) x = 20 mm, planar, and (e)x =30 mm, planar; (f )x =40 mm, planar. Flow is into the page. . . 74 Figure 4.7 Mean PLS freestream-normalized intensity profiles above the
vis-cous region (y =7 mm) at different streamwise locations. . . 76 Figure 4.8 (a) comparison of the freestream-normalized density field at x
= 30 mm acquired via RANS (left half ) and PLS (right half ) and (b) RANS pressure field atx =30 mm downstream (left half ) and proposed schematic of the off-body shock structure in the fin-on-cylinder SBLI configuration (right half ). . . 78 Figure 4.9 Density gradient magnitude contours normalized by the gradient
Figure 4.10 RANS density gradient magnitude contours normalized by the gra-dient magnitude at fin half-height at (a)x =10 mm, (b)x =20 mm, and (c)x =30 mm. . . 81
Figure 5.1 Schematic of the test article used for the studies. . . 85 Figure 5.2 Schematic of the PLS setup used for the experiments. . . 88 Figure 5.3 (a) Illustration of the grid generated for the Euler and RANS
simu-lations used in this study. (b) Boundary layer profile comparison between the RANS and the experiment. . . 89 Figure 5.4 Regime map of primary and secondary separation of planar fin
SBLI based on[Zhe82]and the projected regimes of the different fin-on-cylinder SBLI configuraitons used in the current work. . . 92 Figure 5.5 Flow visualizations for each fin angle. This figure contains the flow
vi-sualizations for the following configurations (fin half-angle/ cylinder-diameter/freestream-Mach-number): a) 5◦/76 mm/M2.5; b) 5◦/76
mm/M3; c) 10◦/76 mm/M2.5; d) 10◦/50 mm/M3; e) 10◦/76 mm/M3;
f ) 12◦/76 mm/M3; g) 14◦/76 mm/M2.5; h) 14◦/76 mm/M3; i) 20◦/76
mm/M2.5; j) 20◦/50 mm/M3; k) 20◦/76 mm/M3. Flow is from right
to left. . . 94 Figure 5.6 Unwrapped top-view surface streakline visualization images of
pri-mary separation (S1), pripri-mary reattachment (R1), and secondary separation (S2) loci for combinations of: a) 10◦/50 mm/3, b) 20◦/50
mm/3, c) 10◦/76 mm/3, and d) 20◦/76 mm/3. . . . 97
Figure 5.7 Top view surface streakline visualization of primary separation (S1), primary reattachment (R1), and secondary separation (S2) loci for a 25-mm tall fin on a) flat plate, and b) 50-mm diameter cylinder at Mach 2.5. . . 98 Figure 5.8 Unwrapped surface mean wall static pressure fields of the
fin-on-cylinder SBLI. The separation and reattachment loci are overlaid from figure 5.7 (b). . . 99 Figure 5.9 Mean wall static pressure profiles along spanwise (for planar fin
SBLI) and azimuthal (for fin-on-cylinder SBLI) direction at different streamwise locations. Figure (a): planar fin SBLI wall pressure pro-files, and (b): fin-on-cylinder SBLI wall pressure profiles. The values are normalized by freestream pressure. . . 101 Figure 5.10 A representative instantaneous PLS field after background
subtrac-tion and laser sheet correcsubtrac-tion obtained at x =25 mm. The flow direction is into the page. . . 104 Figure 5.11 Ensemble averaged freestream normalized PLS images at different
Figure 5.12 Normalized PLS r.m.s. images at different streamwise locations: (a) x =10 mm; (b)x =15 mm; (c)x =20 mm; and (d) x=25 mm. The abbreviations I.S., S.S., and R.S. refer to Incident Shock, Separation Shock, and Reattachment Shock, respectively. Flow is into the page. 106 Figure 5.13 Simultaneous visualization of surface pressure field and off-body
features of the fin-on-cylinder SBLI at: a) x =20 mm, and b)x = 25 mm. . . 108 Figure 5.14 Density fields illustrating the fin-on-cylinder shock structure from
Euler simulations: a) 25-mm tall fin at x=10 mm; b) 25-mm tall fin atx =25 mm; c) infinitely-tall fin atx =25 mm. . . 111 Figure 5.15 Comparisons of inviscid shock density jumps at different
stream-wise locations: a) at y=12.5 mm corresponding to the half-height of the 25-mm tall fin; b) corresponding to the triple point location at different streamwise distances; and c) a comparison between experimental and computed density jumps at y=12.5 mm for the 25-mm fin. . . 113 Figure 5.16 PLS-based density profiles at different streamwise locations at 1 mm
below the triple point. ‘S’ and ‘R’ denotes the locations of separation and reattachment shocks identified from r.m.s. fields. . . 116 Figure 5.17 PLS-based density jump at various y-distances along the
separa-tion shock: (a) density ratio variasepara-tion atx =20 mm along with the corresponding field that illustrates the separation shock structure; (b)y variation of the separation shock strength at different stream-wise locations; (c) corresponding density jump in planar fin SBLI at different streamwise locations. . . 118 Figure 5.18 (a) Off-body PLS-based density field atx =25 mm; and b)
compari-son of the variation of density jump across the separation shock at various heights between 25- and 50-mm tall fins. . . 120 Figure 5.19 Delineation of surface features of the SBLI generated by a 50-mm tall
fin-on-cylinder: a) surface streakline visualization image; b) mean wall pressure field; and c) comparison of freestream-normalized mean wall pressure profiles for the 25-mm and 50-mm tall fins. . . . 121 Figure 5.20 Top view schematics of the separated flow in planar fin SBLI vs.
fin-on-cylinder SBLI to illustrate the separated flow shrinkage down-stream of the limiting boundary layer in fin-on-cylinder SBLI: (a) planar fin SBLI; and (b) fin-on-cylinder SBLI. The shaded orange region portrays the separated flow in both figures. . . 123 Figure 5.21 Surface streakline patterns obtained from RANS simulations of the
fin-on-cylinder SBLI flowfield: (a) without wind tunnel boundary layer interference; and (b) with wind tunnel interference. . . 124
Figure 6.3 Wake velocity profiles 25 mm downstream of the (a) 3.6mm tall VG and (b) 6 mm tall VG, compared against baseline profiles without the VG. . . 134 Figure 6.4 Baseline pressure field of (a) the cylinder surface and (b) fin face. . 135 Figure 6.5 Percentage changes in fin-normal force and moments with and
without VG control over different VG configurations: (a) normal force on the fin; (b) roll moment; (c) yawing moment; (d) pitching moment. . . 137 Figure 6.6 Flowfield generated by VG: (a) basic schematic of the vortices
gen-erated (reproduced from Yan et. al[Yan17]); (b) surface pressure field over and around the VG; (c) planar laser scattering field of the vortical flow measured 20 mm downstream of VG trailing edge (x= -5mm) . . . 139 Figure 6.7 Mean cylinder surface streaklines: (a) baseline; (b) 6-mm tall VG at
x=-25 mm andφ=-10◦; (c) 3.6-mm tall VG at x=-25 mm andφ=
-10◦; (d) 6-mm tall VG at x=-12 mm andφ=-25◦. . . 140 Figure 6.8 Mean cylinder surface pressures for: (a) baseline; (b) 6-mm tall VG
at x=-25 mm andφ=-10◦; (c) 3.6-mm tall VG at x=-25 mm andφ
=-10◦; (d) 6-mm tall VG at x=-12 mm andφ=-25◦. . . 141 Figure 6.9 Mean fin surface pressures for: (a) baseline; (b) 6-mm tall VG at x
=-25 mm andφ=-10◦; (c) 3.6-mm tall VG at x=-25 mm andφ=
-10◦; (d) 6-mm tall VG at x=-12 mm andφ=-25◦. . . 143 Figure 6.10 Cross-section plane z-direction mean velocity field overlaid on the
surface pressure field for: (a) baseline; (b) 6-mm tall VG at x=-25 mm andφ=-10◦. . . 144 Figure 6.11 Incoming boundary layer velocity profile for the 6 mm tall VG placed
90 mm upstream of the fin leading edge. . . 145 Figure 6.12 Mean surface pressure fields for: (a) baseline; (b) 6-mm tall VG at x
=-90 mm andφ=0◦. . . 146
Figure 6.13 Mean surface streaklines for: (a) baseline; (b) 6 mm VG placed atx =-25 mm andφ=0◦; (c) 6 mm VG placed atx=-25 mm andφ=-25◦148 Figure 6.14 Mean surface pressure fields for: (a) baseline; (b) 6 mm VG placed
atx =-25 mm andφ=0◦; (c) 6 mm VG placed atx =-25 mm and
φ=-25◦ . . . 149 Figure 6.15 Mean velocity fields for: (a) baseline, plane:x =-5 mm; (b) 6 mm
VG atx =-25 mm andφ=0◦, plane:x =-5 mm; (c) 6 mm VG atx
=-25 mm andφ=-25◦, plane:x=-5 mm; (d) baseline, plane:x = 15 mm; (e) 6 mm VG atx=-25 mm andφ=0◦, plane:x =15 mm;
(f ) 6 mm VG at x =-25 mm andφ =-25◦, plane: x =15 mm, (g)
baseline, plane:x =25 mm; (h) 6 mm VG atx =-25 mm andφ=0◦, plane:x =25 mm, (i) 6 mm VG atx =-25 mm andφ=-25◦, plane:
x =25 mm . . . 151
Figure A.3 Dimensioned drawing of the 20◦half-angle fin used in the
experi-ments. . . 174 Figure A.4 Dimensioned drawing of the 50 mm outer diameter cylinder used
CHAPTER
1
INTRODUCTION
1.1
Motivation and Goals
Shock interactions with turbulent boundary layers have ubiquitous occurrence in high
speed air platforms, and shock-induced boundary layer separation is the dominant cause
for several undesirable phenomena like scramjet inlet unstart, premature failure of control
surfaces, and roll/side-force reversal in ammunitions, among others. Due to their
impor-tance, shock wave/boundary layer interactions (SBLI) and shock-induced flow separation
have been extensively investigated over the last several decades. Much of the progress made
over the last several decades are reviewed in many articles:[Dol01],[Set94],[Cle14], and
[Gai15].
ramps[Set76; And87; Van18], sharp fins[Kni87; Kub82], and impinging shock interactions
[Pip09; Hum09; Sou10]. etc. with canonical turbulent boundary layers. Among the different
geometries, SBLI generated by a sharp fin has a direct relevance to control forces and
mo-ments generated in supersonic air vehicles, projectiles and munitions. Almost all previous
studies on fin SBLI were made in planar configurations where the fin is placed on a flat plate
[Kni03; Dol01; Zhe06; Gai15]. Despite this extensive research, it is unclear if the conclusions
drawn are directly extendable to a sharp fin placed on a cylindrical surface, a geometry
common among modern high-speed projectiles and vehicles.
This study is inspired by answering whether the non-linear shock interactions with a
perturbed boundary layer that develops over an axisymmetric body can be used to generate
control forces required for high maneuverability. Such perturbed boundary layers may
come as a result of canard interactions with the tail fin, induced cross-flow from
non-zero incidence flights or unsteady maneuvers, or the introduction of new control surfaces
near the fin root. Specifically, the goal to provide a basic understanding of the underlying
fluid dynamics when a sharp fin is placed on a cylindrical surface to introduce 3-D relief
into the flow. As evident by the literature, little attention has been given to fins placed on
axisymmetric bodies, and even fewer on how that flowfield responds when the incoming
boundary layer is perturbed.
The path taken in this study is multi-fold: first, a new experimental technique was
developed that provides density fields of the body flow to understand how the
off-body flow corresponds to any changes seen in the surface flow when the fin is placed on
a cylindrical surface. This technique is in the form of quantitative planar laser scattering
(PLS). Next, the baseline flowfield is established for the fin placed on a cylindrical surface
in both a pre- and post-separated flowfield. The former allows for direct investigation of
the effect of 3-D relief on the inviscid shock structure, while the latter simulates a post-stall
flowfield that may result from an extreme maneuver while providing rich new physics in
layer of the baseline flowfield is then perturbed to unravel the non-linear change in the
shock/boundary layer interaction. Thus, this work has the potential to greatly enhance the
aerospace community’s understanding of shock/boundary layer dynamics by providing the
field with a method to visualize a region that is normally challenging in the context of many
SBLI studies, an understanding of how the well-documented planar sharp fin flowfield is
altered when placed in realistic configurations, and potentially insight into ways that can
be used to reduce undesirable phenomena such as control-force reversal or to establish
new control techniques for high maneuverability.
1.2
Literature Review
1.2.1
Review of the Flowfield Past a Sharp Fin
In some of the earliest works, Bogdonoff’s group[Tan87; Bog89; Set80]made wall pressure
measurements to investigate appropriate scaling parameters. They found that the incoming
boundary layer displacement thickness, which is used in 2-D closed separations, is not
an appropriate parameter to scale “open” separations: this was the first indication of the
possible absence of the relevant length scale for this type of separation.[Set85]and[Set86]
examined the pressure fields of the SBLI generated by sharp fins and cones, and showed
that the SBLI unit exhibited quasi-conical symmetry, meaning the statistical properties of
the unit are relatively constant along radial lines originating from a virtual conical origin
(VCO). They also showed that the cone vertex angle (measured with respect to the freestream
direction) resulted in a good agreement in the mean and root-mean-square (r.m.s.) pressure
profiles. Subsequent works by Gibson & Dolling[Gib91]and Schmisseur & Dolling[Sch94]
showed that the power spectrum of the wall pressure fluctuations also collapsed along a
given cone vertex angle.
Accurate prediction of the onset of shock-induced flow separation onset in sharp-fin
the separation data over several fin- and ramp-induced SBLI, and collated his data with
several other separation data in literature spanning a wide range of Mach numbers and
shock strength. He showed that the shock strength (quantified by inviscid pressure ratio)
that causes separation in 2-D ramp-SBLI has a Mach number dependence. In contrast,
separation in the 3-D fin-SBLI occurred when the inviscid pressure jump across the shock
exceeded the upstream pressure by 50% without a Mach number dependence. While several
subsequent works showed agreement with Korkegi’s separation criterion, many works also
reported a Reynolds number dependence on separation onset.
To address some of the dependence of the state of incoming boundary layer on
separa-tion, free interaction theory (FIT) argued that the shear forces within the boundary layer
subjected to an adverse pressure gradient will help overcome the pressure forces. Using
the momentum balance close to the wall, a relation between the wall pressure beneath the
separation point and the inflow properties was derived. This relation was further used to
de-termine the shock strength corresponding to separation onset. The free interaction theory
was also extended to 3-D planar fin SBLI to predict separation onset and the static pressure
beneath the primary separation[Bab11]. Several efforts showed that the FIT predictions
work quite well at low and moderate Reynolds numbers. Subsequent efforts developed
empirical relations and corrections to FIT to predict the separation onset with much better
accuracy at high Reynolds numbers and in more complex geometries. Babinsky & Harvey
[Bab11]have compiled several of these studies and their regimes of application.
Once the flow is separated, further increase in fin shock strength is reported to
pro-duce interesting flowfields that correlate with the shock strength. Zheltovodov[Zhe82]
characterized different regimes of separation based on the fin shock strength and Mach
number. Using his nomenclature, these regimes are classified as: (I) interaction without
boundary layer separation, (I I) interaction with boundary layer primary separation (and
no secondary separation), (I I I) flow with secondary separation, (I V) secondary
of secondary separation. For a given Mach number, increasing the fin angle transitions
the SBLI regimes fromI throughV I. Thus, post separation, further increase in the shock
strength causes the generation of additional set of separation and reattachment, called
secondary separation (regimeI I I). An illustration of the flowfield is shown in figure 1.1.
This secondary separation is characterized by a secondary separation vortex that is
generated by the outer flow that is recirculated from the leading edge of the primary
sepa-ration vortex (close to the fin root). However, with increasing shock strength, the velocity of
recirculated flow from the leading edge increases into the turbulent regime, which is more
resistant to separation[Bab11]. This was suggested to cause the suppression and
disappear-ance of the secondary separation (regimesI V andV), which was corroborated by[Zhe87].
Subsequently, the investigation done by[Bal16a]on the effect of Reynolds number on the
sharp fin SBLI resulted in flow patterns largely consistent with the regimes demarcated
by Zheltovodov. The only exception is the case for a freestream Mach number of 3 and a
fin deflection angle of 22◦where Baldwin et al.[Bal16a]noticed the presence of secondary
separation, despite this test case falling within regimeV. Interestingly, the experimental
results modeled by Horstman deviate in the same way for a freestream Mach number of
3.95 and a 20◦sharp fin[Hor89]. With further increase in shock strength, recirculating flow
velocity exceeds sonic conditions and a normal shock forms at the recirculating flow that
causes the re-emergence of the secondary separation (regimeV I).
Significant computational efforts were also undertaken by several researchers to
pre-dict the complex flow structure and surface pressure patterns under various conditions.
These include the RANS simulations by several different groups, as reviewed by Knight
et al.[Kni03], Thivet[Thi02], and more recently by Gaitonde[Gai15]and LES simulations
of Fang et al.[Fan17], Touber & Sandham[Tou09]and Loginov et al.[Log06]. While most
turbulence models used for the RANS simulations provided a reasonably accurate
predic-tion of the onset of primary separapredic-tion, they showed severe discrepancy with experiments
standard turbulence models could predict the secondary separation that were
experimen-tally observed. A weakly nonlinear extension of thek−ωmodel[Wil88]due to Durbin
[Dur96]predicted the secondary separation with significantly better fidelity compared to
the standard models[Zhe06]. Upon closer investigation, it was shown that the success of
the revised model in predicting the secondary separation onset coincided with a smaller
turbulence kinetic energy within the primary separation vortex and the shear layer above
the vortex. Thus, the secondary separation is determined by the turbulence features of the
primary separation vortex, and, perhaps, the entrainment characteristics of the shear layer.
Alvi & Settles[Alv92]provided excellent qualitative visualization of the off-body flow/
shock structures associated with open separation generated in Regime III using conical
shadowgraphy and planar laser scattering. A schematic of the separation unit based on
their findings is illustrated in figure 1.1. It can be observed from figure 1.1 that the inviscid
shock bifurcates into aλ-shape when it interacts with the boundary layer. The boundary
layer separates behind the upstream stem of theλ-shock to form a primary separation
vortex and subsequently reattaches behind the downstream stem of theλ-shock, and the
size of this open separation scales with the shock strength (i.e. fin angle and incoming Mach
number). Furthermore, the primary streamwise vortex extends from the line of primary
separation S1 to primary reattachment R1. A slipstream emanating from the triple point
of theλ-shock impinges upon the plate near the root of the fin that causes a sharp rise in
the unsteady pressure loading near this impingement location. A sufficiently high velocity
reverse flow was also created underneath the primary separation vortex, which results in
a region of secondary separation, bounded by the separation and reattachment points
S2 and R2, respectively. The experimental findings were also corroborated by RANS and
LES simulations employing different turbulence models[Kni87]and using more advanced
(a) (b)
Figure 1.1Sketch ofλ-shock structure: (a) streamwise and (b) top views, based on[Alv92].
1.2.2
Planar Laser Scattering
The ability to visualize and quantify these complex off-body flowfields greatly enhances the
understanding of the flow interactions in practical situations and can help advance high
fidelity predictive tools. Several previous methods have been devised and implemented
in the past to visualize different types of flows. Maltby[Mal62]discusses the utilization
of various smoke techniques (such as kerosene vapors) in low speed tunnels but notes
that it is difficult to produce an adequate amount of smoke for high speed flows. For
higher speed flows, specifically those in the supersonic regime, shadowgraph and schlieren
techniques are preferred due to their ability to easily deduce wave structures caused by
density gradients.
Focused schlieren techniques, in particular, have been used successfully to investigate
and quantify complex flows such as boundary layers and wind tunnel noise[Par12],
low-speed axisymmetric mixing layers[Alv93], and the turbulent structures and convection
velocities of supersonic boundary layers[Alv93; Gar98]. Coupled with other systems such
as deflectometers, focused schlieren can be used to acquire turbulence frequency data
via fluctuating density gradients. Although focused schlieren provides a promising,
non-intrusive and cost-efficient method of flow measurement[Gar98], the technique can be
difficult to setup or adjust[Fis50], and may result in low signal to noise ratios[Gar98; Par12].
these issues with the proper optical systems. However, these techniques are line-of-sight
integrating methods that cause the three dimensional information in the flowfield to be lost.
The vapor screen method first implemented by Allen & Perkins[All51]utilizes a thin light
sheet to illuminate particles within a flowfield. To alleviate some of the condensation effect
when using global seeding in the flowfield[McG61], local vapor seeding was used such as
that by Settles & Teng[Set83], where only the flow region of interest is seeded instead of the
entire flow.
Over the past few decades, planar laser scattering (PLS) has been utilized to
visual-ize instantaneous flow structures of supersonic flows. Clemens & Mungal[Cle91; Cle95]
employed PLS with ethanol fog as seed particulates to visualize the structures within a
supersonic mixing layer. Using the aerosol coagulation model of Fuchs[Fuc64], Clemens
& Mungal[Cle91]were able to account for the qualitative variations in the PLS signals in
the mixing layer across their measurement domain, which spanned about 30 cm in length.
Subsequently, Alvi & Settles[Alv92]used PLS of ice clusters in the flow to visualize the flow
and shock features generated by the planar fin-shock induced separated flow. Wu & Miles
[Wu00]performed MHz rate PLS using seeded gaseousC O2fog to visualize the flow
dynam-ics in shock boundary layer interactions generated by a compression ramp. The authors
chose seed particles that readily evaporated in the boundary layer and separated flow to
give them an excellent contrast in their visualization images. Subsequently, Thurow et al.
[Thu03]implemented MHz rate PLS to study the turbulent mixing and noise generation
in a supersonic jet exhausting into ambient air. More recently, tomographic PLS has been
developed to visualize the 3-D mixing fields in subsonic jets with immense success[Lei14].
One of the biggest drawbacks of the PLS imaging technique is that its utility had been
restricted to qualitative visualization of the flowfield. Traditionally, quantitative imaging of
flowfields has been performed using gas phase measurement techniques such as Rayleigh
scattering, planar laser induced fluorescence, etc. For example, Shirinzadeh et al.[Shi96]
Balla[Bal15]made mean density measurements over a cap placed in a Mach 10 flow, and,
more recently, made fluctuating density measurements in the same configuration[Bal16b].
Panda & Seasholtz[Pan99]and Mielke et al.[Mie05]have also used Rayleigh scattering for
making density field measurements to study shock/vortex and shock/shock interactions in
underexpanded jets.
Filtered Rayleigh scattering (FRS) imaging is also a common approach for making
density and pressure field imaging in non-reacting flows[For96]. Boguszko & Elliott[Bog05]
used a scanning FRS approach where the scattering spectrum was obtained to determine
mean temperature, velocity, and pressure fields in supersonic free jets. In addition, Elliot
& Samimy[Ell96]performed filtered angularly resolved Rayleigh scattering (FARRS) and
conventional Rayleigh scattering on an underexpanded supersonic axisymmetric jet for
simultaneous velocity, density, and temperature measurements. More recently, George et al.
[Geo14]investigated the use of a combination of wavelengths in FRS scattering, which can
be used for direct measurements of density, and implemented the approach in supersonic
flows.
Planar laser induced fluorescence (PLIF) has also been used as a tool to visualize
non-reacting flows as well as measuring its gas density and temperature. PLIF of NO and OH has
been used to image qualitative temperature and density variations in high-speed flowfields
present in low[Woo04; Nai09]and high enthalpy facilities[Pal95]. NO PLIF has also been
used in the past for quantifying the NO number density fields in high enthalpy facilities
[Dan99]. More recently, two-photon krypton PLIF was used in an underexpanded krypton
jet to obtain centerline density and temperature profiles and to visualize hypersonic conical
shock structures[Nar11; Lam17].
All of the flow quantification techniques using Rayleigh scattering and fluorescence
imaging place a substantial demand on the laser and detector instrumentation for making
measurements: this poses a significant challenge for making measurements over large
with modest instrumentation. Planar laser scattering (PLS), on the other hand, requires
significantly smaller laser energies; if the PLS imaging can be made quantitative, it can
potentially overcome the challenges for spatial and temporal scalability. Hence, recent
efforts have been made to image the gas density fields in different supersonic flow
con-figurations using a calibrated PLS approach with synthetic nanoparticles seeded into the
flow[Tia09]. Whereas the potential for this technique has been demonstrated in
super-sonic flows, a systematic understanding of the underlying physics and validation has not
been attempted previously. Furthermore, for more general applications, there is a need
to understand calibrated PLS approaches that use readily available and inexpensive seed
materials.
1.2.3
Axisymmetric Geometries with a Sharp Fin
Compared to planar fin SBLI, only a few studies exist for axisymmetric configurations.
Axisymmetric fin SBLI studies like those of Blair et al.[BJ83]focused on determining the
integrated forces on missile-like models[Fre11; Sil15; Sah90; Bha14]. The phenomena of
pitch and roll reversals were reported in these studies when the fin angles exceed stall
angles, wherein further increases in fin angles result in diminished forces and moments.
Most subsequent efforts focused on canard and tail fin interactions to predict and control
the pitch and roll reversal phenomena (e.g.,[Sah17; DeS02]) without emphasizing the
shock-induced flow separation. The works of Hooseria & Skews[Hoo15; Hoo17]have provided
deeper insight into 3-D diffraction of shock waves on curved surfaces when two slender
bodies are placed in close proximity in supersonic flow. These works show the retention of
primary and secondary boundary layer separation on the curved surface, suggesting the
planar regimes set forth by Zheltovodov may be retained for curved geometries.
Bhagwandin[Bha15]performed the only available investigations into the fundamental
features of SBLI generated by an incident oblique shock on a cylindrical surface. The author
direct incidence on the cylindrical surface versus the circumferential locations where the
shock wave made a grazing incidence like a fin shock. While Bhagwandin’s and Hooseria &
Skews’ studies show the rich flow physics associated with an impinging shock on a cylinder
surface, it is not directly extendable to the SBLI generated by a sharp fin placed on the
cylindrical surface as the impinging inviscid shock structure is substantially different from
that generated by a fin mounted on a cylinder surface.
1.2.4
Perturbed Sharp Fin SBLI
One of the key technological advancements that most projectiles would seek to have is
the ability to make sudden and dramatic turns, which would help achieve very high strike
precision and mitigate collateral damage. The additional and ideal requirements for
im-plementing any desired flow control strategy is that the actuator footprint be small, and
the power requirement fairly minimal. A number of candidate methods have been tested,
prominent among them being the thrust vectoring control jets to cause the sharp turns.
Interestingly vortex based methods have attracted only minimal interest, perhaps due to
very complicated flowfield generated by the vortex generators or due to the fact that the
interactions between the canard wake vortex and the tail fins mainly result in adverse effects
such as roll and pitch reversals[DeS02]. However, the main advantage of the vortex based
methods is the non-linear nature of the flow and the small and simplistic implementation
of the flow actuators. This motivated the current work’s investigation into the flowfield
generated by the tail fins before and after stall (pre- and post-separation) with the rationale
of using vortex control methods on tail fins to create sharp control forces and moments to
engender precision maneuverability.
Previous works have shown that inducing vorticity into the incoming boundary layer
can have significant effects on the SBLI, a review of which is provided by Lu et al.[Lu11]. As
described in this review, the usage of a vortex generator (VG) entrains high momentum fluid
This reduction in separation size is accomplished by decreasing the boundary layer losses
and producing a considerably healthier (lower shape factor) boundary layer[McC93]. In the
majority of these studies, a closed separation was considered with the goal of controlling
separation by reducing its size[McC93; Bab09; And06; Yan17]. Although these goals were
accomplished and the extent of separation was reduced, the effect of the VG remained
relatively localized. By creating an array of VGs, a spanwise modulation in the shock wave
was seen[Gie14]and the effectiveness of reducing the separation size was increased at the
cost of increasing the disturbance footprint. It remains unclear, however, if these results are
directly extendable to an open separation (i.e. a sharp fin) wherein the underlying flowfield
is different from a closed separation.
When the vorticity induced by the VG interacts with the separation shock of aλ-shock
structure, the result can be a significant distortion or even disappearance of the separation
shock[Lu11]. If separation remains, Martis et al.[Mar14]showed a reduction in its size
and apparent vortex/shock and vortex/vortex interactions evident by aberrations in the
fin SBLI separation structures. Alvi’s group recently showed that the flow response in a
planar fin SBLI configuration depends on the location of the perturbation with respect to
the interaction[Mea18; Mea19]. It was found that perturbing the flow near the inception
region with a jet has a significant effect on the separation and reattachment regions of the
flow. Moving the perturbation location farther downstream reduces the effect at primary
separation and increases it near secondary separation; ultimately, the location of the
in-viscid and separation shocks upstream are shifted with little effect on the pressure field
when the flow is perturbed in conically-symmetric flow. Therefore, the flowfield response
can be controlled by changing the location of a perturbation with respect to the fin leading
edge (inception region), where the SBLI is most sensitive. This result is significant because
it suggests that the bulk of the separation can be modified rather than a localized region
and the effectiveness of the VG can propagate further downstream in an open separation,
1.3
Technical Approach
To investigate the effect of 3-D relief on a sharp fin SBLI, a myriad of experimental techniques
are employed to analyze both the surface and off-body mean flows of a fin placed on a
cylindrical surface. Oil flow streaklines provide a qualitative picture of the shear contours
and separation entities, while pressure sensitive paint (PSP) provides a quantitative picture
of the surface pressure field. Moreover, planar laser scattering (PLS) and particle image
velocimetry (PIV) are used to determine how the off-body flow corresponds to the patterns
seen on the surface. A technique was developed to calibrate the PLS intensity fields to
density fields to enhance its quantitative value, thus providing deeper insight into the
physics at play. When possible, all processing is done with in-house codes developed in
MATLAB; the notable exception being processing of the velocity fields, which was done in
DaVis 8.4. Because extreme maneuvers of vehicles would represent a wide range of shock
strengths, separation regimes, and distortion magnitudes, extensive work is presented in
this manuscript in which the Mach number, fin angle, extent of 3-D relief, and perturbation
size are varied. Complementary planar fin SBLI and computational RANS simulations are
presented as well as a basis of comparison to the fin-on-cylinder configuration and to
extend the results into regions unobtainable in the experiments. A consolidated list of all of
the experimental and computational methods is provided in chapter 2.
1.4
Problem Context
Before discussing the details of the experiments, it is important to illustrate the uniqueness
of the flow configuration studied to show that fin SBLI over a cylindrical surface (or any
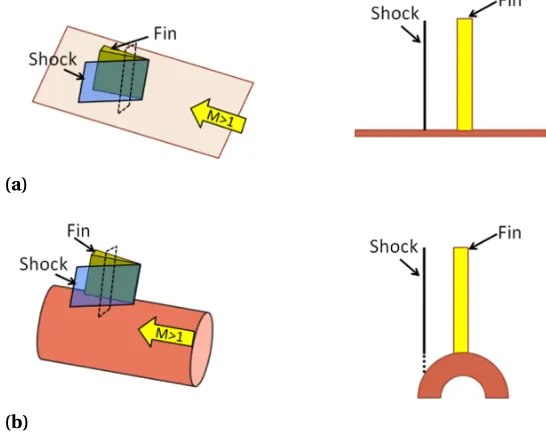
curved surface) is not a simple extension of planar fin SBLI. Figure 1.2 considers an inviscid
supersonic flow over an infinitely tall fin placed on a flat plate (figure 1.2 (a)) and on a
(a)
(b)
Figure 1.2Illustration of fundamental modifications to the inviscid shock structure generated in a fin-on-cylinder configuration.
distance for the two cases (shown as a dashed rectangle) is compared for the two cases.
It can be observed that for the planar case, the inviscid shock wave retains its strength
and shape across the fin height all the way to the plate surface. In contrast, for the case of
fin mounted on a cylindrical surface, the inviscid shock of a constant strength will extend
across the fin height; however, the shock strength cannot be supported in the region close
to the cylindrical surface (shown as dashed line) as there is no compression surface. This
modifies the inviscid shock structure and features in the region close to the cylindrical
surface. The 3-D relief of the cylindrical surface described in this manuscript denotes the
additional room along the azimuthal direction offered to the flow due to the curvature of
the cylinder surface. For now, it is important to note that even the inviscid shock system
generated by the fin mounted on a cylindrical surface is quite different from the planar
case. The incoming boundary layer reacts to the adverse pressure gradient caused by the
modified inviscid shock, resulting in interesting outcomes to the SBLI flowfield that are
1.5
Overview of Dissertation
Chapter 2 outlines the experimental and computational setups used in the subsequent
analyses.
Chapter 3 outlines the novel technique of turning the normalized PLS intensity fields
into normalize density fields. The theory behind this analysis is presented, as well as a
discussion on the expected error magnitudes. The results show excellent agreement with
corresponding RANS simulations, and is a promising technique for investigating the
devel-opment of the off-body shock structure.
Chapter 4 isolates the effect of 3-D relief on a sharp fin SBLI that is unseparated, which
corresponds to mild maneuvers and interaction strengths. Because the flow is unseparated,
the influence of 3-D on the inviscid shock structure can be directly analyzed. A significant
weakening of the shock is seen in the vicinity of the cylinder surface–a phenomenon not
present in planar geometries–and an analysis of the modified shock structure is provided.
Chapter 5 extends the analysis of the baseline mean flowfield for when a sharp fin is
placed on a cylindrical surface. An investigation of the influence of interaction strength and
extent of 3-D relief on the separation regimes and entities is provided, with special interest
given to a highly separated (post-stall) flowfield. A significant deviation from a planar fin
SBLI is seen in the size and growth rate of the separated flow, and the shock structure is
shown to exhibit a unique curvature as a result of finite fin height effects and 3-D relief.
Having established the baseline flow structure, chapter 6 investigates the effect of
introducing streamwise vorticies into the incoming boundary layer on the mean flowfield.
Various sizes of micro-ramp vortex generators are used to simulate varying perturbance
strengths that would be introduced from upstream control surfaces or maneuvers. An
analysis of the relevent mechanisms and perturbation locations provides promising support
for exploiting the non-linear shock interactions for enhancing vehicle control forces.
for future work.
1.6
Published Works
The research provided in this dissertation led to the publication of the following works.
1.6.1
Journal Papers
1. Pickles, J. D., Mettu, B. R., Subbareddy, P. K., & Narayanawamy, V. “On the mean
structure of sharp-fin-induced shock wave/turbulent boundary layer interactions
over a cylindrical surface”.Journal of Fluid Mechanics865(2019), pp. 212 – 246.
2. Pickles, J. D., Mettu, B. R., Subbareddy, P. K., & Narayanawamy, V. “Gas density field
imaging in shock dominated flows using planar laser scattering”.Experiments in
Fluids59.12 (2018), pp. 1 – 15.
3. Pickles, J. D. & Narayanawamy, V. “Investigation of Surface Curvature Effects on
Unsep-arated Fin Shock Wave/Boundary Layer Interactions”.AIAA Journalto be published
(2019).
4. Pickles, J. D. & Narayanawamy, V. “Achieving High Maneuverability and Precision in
Munitions Using Non-Linear Flow Interactions”.AIAA Journalunder review(2019).
1.6.2
Conference Papers
1. Pickles, J. D., Mettu, B. R., Subbareddy, P. K., & Narayanawamy, V. “Fin-generated
shock wave/turbulent boundary layer interactions on a cylindrical surface with a
distorted incoming boundary layer”.AIAA Aviation 2018 Forum. American Institute
2. Pickles, J. D., Mettu, B. R., Subbareddy, P. K., & Narayanawamy, V. “Sharp-fin induced
shock wave/turbulent boundary layer interactions in an axisymmetric
configura-tion”.47th AIAA Fluid Dynamics Conference. American Institute of Aeronautics and
Astronautics. 2017. pp. 1 – 21.
3. Pickles, J. D., Mettu, B. R., Subbareddy, P. K., & Narayanawamy, V. “Sharp-fin induced
shock wave/turbulent boundary layer interactions in an axisymmetric
configura-tion”.46th AIAA Fluid Dynamics Conference. American Institute of Aeronautics and
Astronautics. 2016. pp. 1 – 19.
4. Lam, K-Y, Pickles, J. D., Narayanawamy, V., Carter, C. D., & Kimmel, R. L. “High-Speed
Schlieren and 10-Hz Kr PLIF for the new AFRL Mach-6 Ludwieg Tube Hypersonic Wind
Tunnel”.55th AIAA Aerospace Sciences Meeting. American Institute of Aeronautics
and Astronautics. 2017.
5. Pickles, J. D. & Narayanawamy, V. “Achieving High Maneuverability and Precision in
Munitions Using Non-Linear Flow Interactions”.31st International Symposium on
Ballistics. International Ballistics Society.to appear 2019. pp. 1 – 12.
6. Mettu, B. R., Pickles, J. D., Subbareddy, P. K., Narayanawamy, V., Vasile, J. & DeSpirito, J.
“Analysis of turbulence models to predict fin-on-cylinder shock boundary layer
CHAPTER
2
INVESTIGATION METHODS
In this chapter, an overview of the experimental and computational conditions are provided
for each of the methods used in this study. Although a general description of the PLS setup is
described here, Chapter 3 is dedicated to describing the theory and research into developing
the technique.
2.1
Experimental Approach
2.1.1
Wind Tunnel Facility
All experiments were performed in the supersonic wind tunnel facility at North Carolina
State University. This is a blowdown tunnel with a variable throat design to achieve test
that vents into ambient air on the roof of the laboratory building. The test section has a
constant area measuring 150 mm×150 mm×650 mm. Optical access to the test section
is provided via a 100 mm circular port on the tunnel ceiling and two removable quartz
windows on the sides. Models can be mounted on either the tunnel ceiling or either sidewall
via customizable mounts which replace the circular plug or windows, respectively. In this
way a variety of camera angles and imaging planes can be used to acquire data as required.
Moisture is removed from the freestream air (compressed into two large tanks at 930 kPa)
via a drying unit manufactured by Ingersoll-Rand, which maintains a dew point of at least
230 K. The dryer can also be partially bypassed to control the amount of moisture present in
the freestream when conducting PLS experiments. The tunnel is controlled via a LabView
VI that is programmed to alter the tunnel run time and stagnation pressure as needed. The
VI is also equipped with a PID controller that maintains a constant stagnation pressure for
the duration of the run. For most experiments, a run time of 6 seconds was used.
2.1.2
Models
A hollow half-cylinder model (annular cross-section) made of low carbon steel, 430 mm
long, was machined to have a sharp leading edge and was placed facing the freestream at
nominally zero yaw and pitch angle with respect to the incoming flow (figure 4.1 (a)). The
half-cylinder model spanned a full 180◦and had an outer diameter of 50 mm. For a subset
of the experiments, a cylinder model of similar specifications but a 76 mm outer diameter
was used. A sharp fin was mounted on the cylinder surface at a downstream distance of
340 mm to create a shock wave that would interact with the boundary layer that developed
on the cylinder surface. A standard right-hand coordinate system was defined at the fin
leading edge/fin root with positivexin the streamwise direction and positivey pointing
vertically outward along the fin.
Complementary investigations were also performed in a planar fin SBLI configuration
those of a canonical planar fin SBLI (figure 4.1 (b)). The planar fin SBLI was generated by a
20◦sharp fin that was mounted to a 370 mm long flat plate in Mach 2.5 flow. A boundary layer
developed over the plate surface and transitioned naturally to fully developed turbulent
boundary layer. The fin was mounted such that its leading edge was located approximately
270 mm downstream of the plate leading edge, and the plate’s mounting struts recessed the
unit away from the wind tunnel wall boundary layer. A summary of the incoming boundary
layer characteristics is shown in table 6.1. Comparison of the entries in table 1 shows that
the boundary layer parameters are quite similar between the fin-on-cylinder and planar
fin SBLI geometries, allowing for direct comparison between the two configurations. A
schematic of the two configurations with the origins defined is shown in figure 4.1.
(a) (b)
Figure 2.1Representation of the (a) fin-on-cylinder and (b) planar fin models used in the experimental investigations.
For most experiments presented in this work, the fins were 25 mm in height, which was
approximately a factor of four taller than the incoming boundary layer thickness. However,
isolated studies were made using another 50 mm tall fin for certain fin angles to explore
the effect of fin height on the SBLI. Two half-cylinder models with outer diameter of 50 mm
and 76 mm were employed for this study, and fin half-angles ofα= 5◦, 10◦, 12◦, 14◦, and
Table 2.1Incoming flow and boundary layer characteristics
Parameter Fin-on-cylinder SBLI Planar fin SBLI
xB L 290 mm 245 mm
M∞ 2.5 2.5
u∞ 580 m/s 580 m/s
T∞ 130◦K 130◦K
Re/m 5.3×107/m 5.3×107/m
Reθ 15000 17000
δ99 6 mm 5 mm
θ 0.28 mm 0.31 mm
Cf 0.0017 0.0020
a factor of 2.7 to 4 smaller than the different half-cylinder model radii. The fins made a
line contact with the cylinder surface, and the maximum gap between the fin root and the
cylinder surface was less than 1 mm. Additional experiments were performed in which
the fin was contoured to the cylinder surface, and no detectable changes were seen in the
results.
2.1.3
Freestream Conditions
All experiments were conducted at nominally constant stagnation pressure and
temper-ature of 450 kPa and 300 K, respectively. Further, most experiments were at a freestream
Mach number of 2.5. These conditions resulted in a freestream unit Reynolds number of
approximately 5.3 x 107/m and a freestream temperature of 140 K, using isentropic rela-tions. A boundary layer developed over the cylindrical and planar surfaces that naturally
transitioned to a fully developed equilibrium turbulent boundary layer, as verified with a
van Driest II transform of the boundary layer velocity profile[Hop72]. A summary of the
incoming boundary layer characteristics at Mach 2.5 is provided in table 6.1. The different
2.1.4
Measurement Techniques
2.1.4.1 Surface Streakline Visualizations
Surface streakline visualizations (SSV) of the separated flow caused by the fin SBLI were
performed for all experimental configurations. To perform the visualization, the test model
was painted with a mixture of UV-fluorescent pigment (DayGlo T13 “Rocket Red” pigment)
and mineral oil before the experimental run. As the wind tunnel stream flowed over the
model during the test run, the dye mixture was driven by the flow shear to result in
streak-line patterns that provided a qualitative picture of the local shear stress. The dye mixture
accumulated at the regions of low shear stress because of the lack of a driving shear force,
allowing for the identification of separation loci. While the streaklines appear to converge
at the (primary and secondary) separation loci, a distinct line from which the streaklines
diverge identifies the reattachment loci. In this manner, a qualitative view of the separated
flow topology can be obtained. The convergence and divergence of the streaklines were
determined by obtaining a movie of the dye flow during the experimental run at 60 fps
using a Nikon D5200 DSLR camera. A 50 mm f/1.2 lens was used, filtered with a 600 nm
longpass filter. The visualization quality was enhanced by illuminating the measurement
region using an 20 W UV lamp, which yielded stark fluorescence signals from the dye that
contrasted well with the black cylinder surface.
2.1.4.2 Mean Pressure Imaging
The surface pressure fields of the SBLI were imaged using pressure sensitive paint (PSP)
from ISSI Inc. The manufacturer reported this paint to have a sensitivity of 0-200 kPa with
a 300 ms response time and low temperature dependence. A 20 W UV lamp was used
to illuminate the paint, and images were captured at 60 fps with a 12-bit CMOS camera
(Photron, Model: FASTCAM SA-X2) longpass filtered at 600 nm. In-house calibration of
Because the PSP experiments were performed separate from the PLS studies, calibration was
done with dry air to match the freestream conditions under normal operating conditions of
the dryer (a minimum dew point of appropriately 230 K). However, no significant difference
in calibration was obtained using atmospheric air. Therefore, the water droplets used in
PLS have no influence on the uncertainty of the PSP contained herein. Should an intense
water fog be present in the freestream during the experiment, calibration should be redone
to improve accuracy as the water droplets may scatter/absorb the UV light, causing an
under-prediction in PSP intensity (over-prediction in pressure). The mean pressure field
was computed using approximately 200 images with an imaged spatial resolution of 250
µm/pxl.
As a statement of the error in the pressure imaging, the pressures during calibration
were monitored to within 1%, which would linearly translate to an error of 1% in the PSP.
Moreover, the relative standard deviation of the 200 images was found to be approximately
3% across the entire region of interest. At high azimuthal angles (|s|>30 mm), errors can
be found upwards of 10%; therefore, these regions have been excluded from any analysis.
This error can be alleviated, however, by imaging the side of the cylinder. Comparing
multiple data sets across several days, a deviation of roughly 7% was seen globally. This
error is attributed to slight variations in stagnation conditions, spatial resolutions, and
consistency of the coat of PSP on the model surface. The day-to-day variation seen in the
results, however, was a global shift in the pressure values and did not change the trends
(and thus conclusions) contained in this manuscript. Thus the errors within the PSP are
estimated to be within 10% of their true values, without an expected change in the trends
or conclusions drawn.
2.1.4.3 Planar Laser Scattering
Planar laser scattering (PLS) imaging was performed in wall-normal/spanwise (y −z)
flow structure, as shown in figure 2.2. The dew point of the air stream was controlled via
the dryer unit that supplied air to the storage tanks. The low temperature conditions of the
freestream caused the introduced vapor to condense/freeze into a droplet/ice fog, allowing
for the identification of the flow features from the large scattering signals. The intensity of
the scattering directly trends with the local density since regions of higher density result
in a larger seeding density. Elevated temperatures in the viscous regions (near wall) cause
diminished signals due to particulate melting and evaporation, limiting the application
of this technique to the inviscid regions of the flow. A 10 Hz Nd-YAG laser was used to
illuminate the fog with approximately 30 mJ of energy per pulse. Images were recorded at
83µm/pxl with a CCD camera (PCO Tech, Model: Pixelfly) fitted with 105 mm f/2.5 lens
and 532 nm bandpass filter.
To correct for variations within the laser profile, the background-subtracted PLS images
were normalized by the freestream signals in each row of the image. Because the seeding of
the water vapor was homogeneous, quantitative gas densities within the SBLI were able to be
computed from the PLS images. This technique as well as an extensive uncertainty analysis
is described in detail in chapter 3. In summary of the error, the different streamwise locations
contained in this manuscript under similar conditions showed a maximum systematic error
of 3% and a precision error of approximately 8% in the mean density due to uncertainty
in the calibration, laser energy fluctuations, and variations in water concentration. It is
expected that the errors are of a similar magnitude in this analysis. Approximately 120
images obtained from three separate runs were use to compute statistical information of
the normalized PLS image.
2.1.4.4 Particle Image Velocimetry
The off-body velocity fields were measured using particle image velocimetry (PIV).
Ap-proximately 180 images spanning 6 runs were acquired using a CCD camera (PCO Tech,