ABSTRACT
PANTIC, ZELJKO. Inductive Power Transfer Systems for Charging of Electric Vehicles. (Under the direction of Dr. Srdjan Lukic.)
In this dissertation I present novel topologies, design procedures, and models of transmitters, receivers, and coupled coils of systems for wireless inductive power transfer (IPT) used for charging of electric vehicles. The research presented addresses important deficiencies of the state-of-the-art solutions: limited efficiency and range of transferred power, and lack of reliable control over the power delivery from the transmitter (source) to the receiver (pick-up). The dissertation consists of five contributions that diagnose the problem, offer the solution and demonstrate the improvements of WIPT subsystems or the system as a whole. As the first topic, a system-level analysis that investigates the concept of the dynamic charging of electric vehicles is presented and a methodology for optimal placement of the IPT infrastructure to eliminate the problem of limited driving range is suggested. The second topic addresses the problem of high switching losses of a full-bridge converter at a transmitter by redesigning the transmitter’s resonant tank to take into account the harmonics of the inverter currents and create soft-switching conditions for the inverter switches.
The power flow between transmitter and receiver coils is often limited by the detuning of the receiver’s resonant circuit, especially when the quality factor of the receiver’s coil is high. The conceptual framework for this problem is presented in the third part and a tri-state-boost based solution is suggested that tunes a parallel resonant circuit by emulating the missing reactance. This solution provides real-time bi-directional tuning with minimum additional components and its effectiveness is demonstrated through numerous experiments and for different sources of detuning – capacitance variation, signal frequency fluctuation, or detuning caused by parasitic coupling with surrounding metal objects.
model of the tubular coil is presented in the dissertation that effectively quantifies the skin and proximity effects and their influence on current redistribution and equivalent resistance. An analytical model is tested through numerous FEM simulations and experimental measurements.
Inductive Power Transfer Systems for Charging of Electric Vehicles
by Zeljko Pantic
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for Degree of
Doctor of Philosophy
Electrical Engineering
Raleigh, North Carolina 2013
APPROVED BY:
________________________________ ________________________________
Dr. Srdjan M. Lukic Dr. Alex Q. Huang
Committee Chair
DEDICATION
BIOGRAPHY
ACKNOWLEDGMENTS
As this four-year journey comes to an end, it is time to reminiscence and to mention all of the great people who have turned these arduous days of work and study into bright memories. First of all, I would like to express my deep gratitude and respect to my advisor, Dr. Srdjan M. Lukic. It was a real pleasure for me to have such an exceptional scholar and a great person as an advisor. Although I was one of his first PhD students, he led me through the research as if he had had decades of experience. Strong but supportive, friendly yet firm, he knew perfectly well when to insist on previously determined plans and when to leave me to follow my own independent work. His office door was always open, and I will never forget the hours of constructive discussion we had throughout the past four years. His enthusiasm and visionary understanding of the position of engineering in the modern world is something I would like to inherit and to demonstrate in my future work.
The second blessing I had was to have the opportunity to be a part of and to work in such a great community as the FREEDM Systems Center at NC State. The perfect leadership of Dr. Alex Q. Huang, the exceptional equipment and organization, as well as the working environment, have been an inexhaustible source of motivation for my scientific work. Witnessing the growth of the Center during the past four years from a small laboratory to one of the best power research centers in the U.S., has been a lively learning experience about how powerful clear vision, enthusiasm, and hard work can be.
Furthermore, I would like to thank my committee members Dr. Alex Q. Huang, Dr. Gregory D. Buckner, Dr. Daniel Stancil, and Dr. Subhashish Bhattacharya for their review of my dissertation and their numerous constructive comments and feedback.
I have also been exceptionally blessed to cross paths with many other outstanding people at the FREEDM Research Center during these four years. At the risk of not mentioning some of them, I would like to specially thank my colleagues Karen Autry, Sanzhong Bai, Siddharth Ballal, Edward Van Brunt, Shashank Bodhankar, Yu Do, Arvind Govindaraj, Shane Hutchinson, Josh Lawrence, Kibok Lee, Hesam Mirzaee, Urvir Singh, and Rui Wang for their friendship, support, and deep intellectual conversations that influenced my ideas and contributed to my creativity.
In addition, I am thankful to all of my friends for bringing comfort and happiness to my life and for helping me overcome the challenges of adapting to a new culture. Thank you Lisa and Ivan Andjelkovic, Shraddha and Amit Aweker, Pam and Steve Cook, Tanja and Milan Dukic, Jorge Pinto Ferreira, Prabhat and Pallavi Kumar, Gina and Robert Lee, and Beverly and Greg Mueffelmann.
However, there is someone who always stood by me, who always celebrated my victories and encouraged me through tough times, someone whose encouragement, love, and sacrifice were endless. Thank you, Katice, from the bottom of my heart!
TABLE OF CONTENTS
LIST OF TABLES….…….………………...x
LIST OF FIGURES……….……………xi
1 Introduction ... 1
1.1 Radiative Wireless Power Transfer ... 2
1.2 Capacitive Power Transfer Systems ... 3
1.3 Inductive Power Transfer Systems ... 6
1.3.1 Primary Converter and Compensation Circuit ... 8
1.3.2 Inductively Coupled Coils ... 9
1.3.3 Secondary Compensation Circuit and Power Conditioner... 10
1.4 Strongly Coupled Operation Regime of the IPT System ... 11
1.5 Brief Overview of the IPT History ... 13
1.6 IPT Systems for Electric Vehicle Charging ... 17
1.6.1 Stationary Wireless Charger for EVs ... 19
1.6.2 Dynamic Charging of EVs ... 21
1.6.3 Challenges in Designing a Wireless Charger for EVs ... 25
1.7 Health and Safety Concerns Related to the Leaking Magnetic Flux ... 26
1.8 The Scope of the Dissertation ... 27
2 System Level Analysis of Dynamic Charging Combined with Batteries or Ultracapacitors ... 29
2.1 Introduction ... 29
2.2 Optimization Assumptions and Constraints ... 30
2.3 Optimization Procedure for a Vehicle with Battery Energy Storage ... 34
2.4 Results of the Optimization Procedure for the Battery-IPT Supply Method ... 39
2.5 Optimization Procedure for a Vehicle with Ultracapacitors ... 43
2.6 Results of the Optimization Procedure for the Ultracapacitors-IPT Supply Method 45 2.7 An Overview of Some Recent Studies of Dynamic Charging for EVs ... 48
2.8 Conclusion ... 50
3 ZCS LCC Compensated Resonant Inverter for Inductive Transfer Applications ... 51
3.1 Introduction ... …51
3.2 Modeling of an IPT System Primary ... 54
3.2.2 Load Modeling ... 64
3.2.3 Model of the Primary of a Voltage-fed IPT System ... 65
3.3 Compensation Circuit ... 67
3.3.1 Series Compensation with a Matching Transformer... 67
3.3.2 Series-Parallel LC Compensation Circuit ... 68
3.3.3 Series-Parallel LCC Compensation Circuit ... 70
3.4 Design of a LCC Compensation Circuit ... 71
3.4.1 Design Procedure for an LCC Compensation Circuit Resulting in ZPA ... 72
3.4.2 Design Procedure for a LCC Compensation Circuit Resulting in ZCS ... 74
3.5 Comparison of the Inverter VA Ratings and Reactive-Power Distribution for ZPA and ZCS Design Procedures ... 78
3.6 Bifurcation Capabilities of the LCC Compensation Scheme ... 81
3.7 Numerical Simulations ... 86
3.8 Experimental Results ... 91
3.9 Conclusion ... 93
4 Framework and Topology for Active Tuning of Parallel Compensated Receivers .. 99
4.1 Introduction ... 99
4.2 Pick-up Topologies and Control Methods – an Overview ... 101
4.3 The Effects of the Pick-up Resonant Circuit Detuning on Power Transfer ... 106
4.1.1 Derivation of the Pick-up Equivalent Resonant Circuit and Resonant Frequencies ... 107
4.1.2 Resonant Circuit Detuning Mechanisms ... 112
4.1.3 Quantitative Analysis of the Detuning Effect on the Pick-up Power Flow... 116
4.4 Overview of Selected Tuning Methods Presented in Research Papers ... 121
4.2.1 Self-Tuning Pick-ups for Inductive Power Transfer [99] ... 122
4.2.2 Phase-Controlled Variable Inductor Based Tuning Method [97], [98] ... 123
4.2.3 A Wireless Power Pickup Based on Directional Tuning Control of a Magnetic Amplifier [101]-[104] ... 126
4.5 Tri-State Boost dc-dc Converter – Main Features ... 127
4.6 A Novel Parallel Compensated Pick-up with a Tri-State Boost... 132
4.7 Design of the Tri-State Boost Controller ... 138
4.5.1 Reactive Power Flow Control ... 139
4.5.2 Real Power Flow Control ... 140
4.8 Simulation Results... 144
4.6.1 Simulation Results for the Detuning Test ... 145
4.6.2 Simulation Results for the Load Test ... 146
4.7.1 Operation of the Tri-State Boost ... 150
4.7.2 Response to Detuning ... 151
4.7.3 Experimental Validation of the Tuning Theory ... 158
4.7.4 Efficiency Comparison ... 163
4.10 Conclusions ... 164
5 Modeling Multi-layer Hollow Tube Based Resonators for Wireless Power Transfer Systems ... 167
5.1 Introduction ... 167
5.1.1 Modeling of WPT Resonators – an Overview ... 168
5.2 Problem Statement ... 174
5.3 Skin Effect Analysis ... 178
5.3.1 Methods for Skin-Effect Resistance Calculation – an Overview and Comparison ... 179
5.3.2 Optimal Wall Thickness for Minimum Skin-Effect Resistance ... 184
5.4 Proximity Effect Analysis ... 194
5.4.1 Derivation of a New Fourier-Series-Based Expression for Proximity-Effect-Caused Current Density Redistribution ... 196
5.4.2 Correction of the Filament Position ... 203
5.4.3 Derivation of an Expression for Proximity-Effect Resistance ... 206
5.4.4 Effect of a Coil Curvature to Proximity-Effect ac Resistance ... 208
5.4.5 Simulation Results ... 210
5.5 Experimental Verification ... 222
5.6 Optimal Tubular Coil Design ... 226
5.6.1 Mutual Inductance ... 226
5.6.2 Self-inductance ... 228
5.6.3 Self-capacitance ... 228
5.6.4 Turn Length Approximation ... 229
5.6.5 Derivation of the Optimization Criterion ... 231
5.7 Conclusion ... 233
6 Multi-Resonant IPT Systems ... 234
6.1 Introduction ... 234
6.2 Design of a Multi-Resonance Receiver ... 236
6.2.1 Design of Receiver’s Compensation Tank ... 238
6.2.2 Impedance Reflected to Transmitter Coil ... 242
6.2.3 Receiver Operating Modes ... 243
6.3 Design of a Multi-Resonance Receiver – a Case Study ... 255
6.4 Design of a Multi-Resonant Transmitter ... 258
6.4.1 Design of Transmitter’s Compensation Tank ... 261
6.5 Design of a Multi-Resonance Transmitter – a Case Study ... 266
6.6 Experimental Verification ... 269
6.7 Conclusions ... 273
7 Conclusions and Plans for Future Work ... 275
7.1 Chapter 2: System Level Analysis of Dynamic Charging Combined with Batteries or Ultracapacitors ... 276
7.2 Chapter 3: ZCS LCC Compensated Resonant Inverter for Inductive Transfer Applications ... 278
7.3 Chapter 4: Framework and Topology for Active Tuning of Parallel Compensated Receivers ... 279
7.4 Chapter 5: Modeling Multi-layer Hollow Tube Based Resonators for Wireless Power Transfer Systems ... 281
7.5 Chapter 6: Multi-Resonant IPT Systems ... 282
REFERENCES ... 285
APPENDICES ... 300
Appendix A: Derivation of the Bifurcation Boundary for ZCS LCC Compensated Primary and Parallel Compensated Secondary ... 301
Appendix B: Derivation of Rac and Cac ... 306
Appendix C: Derivation of the Steady-State Model, Small-Signal Model, and Control-to-Output Transfer Function for a Pick-Up Equipped with a Tri-State Boost ... 310
Appendix D: Optimal Wall Thickness Derivation for Tubular Coil ... 317
LIST OF TABLES
Table 2.1: Vehicle specifications ... 31
Table 2.2: Required energies for 300 miles range covering in [kWh] ... 34
Table 2.3: Characteristics of the energy sources [59]-[61]... 35
Table 2.4: The parameters of the chosen battery module ... 35
Table 2.5: Driving range without IPT (in miles) ... 35
Table 2.6: Optimization results (PIPT=40kW, α=0) ... 40
Table 2.7: Optimization results (PIPT=40kW, α=0.5) ... 40
Table 2.8: Optimization results (PIPT=40kW, α=1) ... 41
Table 2.9: Specification of an ultracapacitor module ... 44
Table 2.10: Methods for skin-effect resistance calculation – an overview and comparison ... 45
Table 3.1: The secondary impedance reflected into the track [85]... 65
Table 3.2: Inverter, track, and compensation circuit parameters for the ZCS and ZPA designs ... 86
Table 3.3: Voltages, currents and apparent power for reactive elements in the compensation circuit . 90 Table 3.4: Experimental currents measurements ... 93
Table 4.1: Normalization of the relevant parameters ... 117
Table 4.2: Expressions for normalized parameters of unregulated and standard-boost equipped receivers... 119
Table 4.3: Normalized voltage and power parameters for tri-state boost based receiver topology.... 135
Table 4.4: Pick-up specifications and design parameters ... 143
Table 5.1: Parameters of the experimental setups that use solid circular wire for their coil design ... 171
Table 5.2: Comparison of maximum relative errors between skin-effect calculation methods ... 184
Table 5.3: Specifications of test tubular coil configurations ... 211
Table 5.4: Comparisons between an FEM and an analytical solution ... 211
Table 5.5: Resistance measured for different meshes ... 220
Table 5.6: Designing specifications for prototypes ... 222
Table 5.7: Specification of coil geometry ... 228
Table 6.1: Receiver - a comparative presentation of the analytical and simulation results ... 257
Table 6.2: Transmitter - a comparative presentation of the analytical and simulation results ... 268
Table 6.3: Parameters of the experimental setup (calculated) ... 270
LIST OF FIGURES
Fig. 1.1: An illustration of radiative power transfer. ... 4
Fig. 1.2. Capacitive power transfer – a typical topology [8]. ... 5
Fig. 1.3: Typical topology of a high power IPT system. ... 8
Fig. 1.4: Tesla coil in Colorado Springs, USA laboratory around 1899. Author: Dickenson V. Alley, photographer at the Century Magazines, Image is Public Domain; {{PD-US}} ... 14
Fig. 1.5: Simplified equivalent diagram of Tesla coil. ... 14
Fig. 1.6: Illustration of stationary wireless chargers. ... 20
Fig. 1.7: Illustration of dynamic charging concept. ... 23
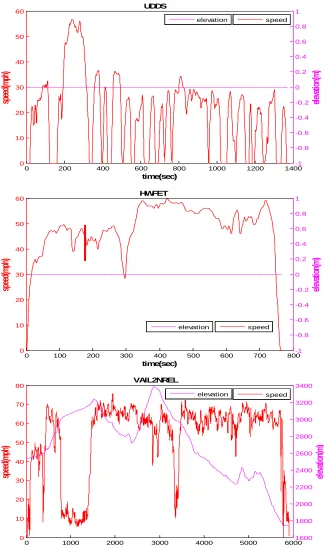
Fig. 2.1: Drive cycles considered in the study: UDDS, HWFET and VAIL2NREL – Speed and elevation are given as the function of time ... 32
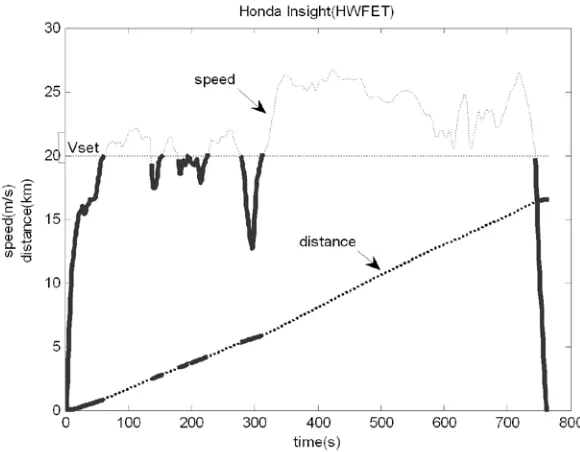
Fig. 2.2: Illustration of the procedure for LIPT,min calculation. ... 38
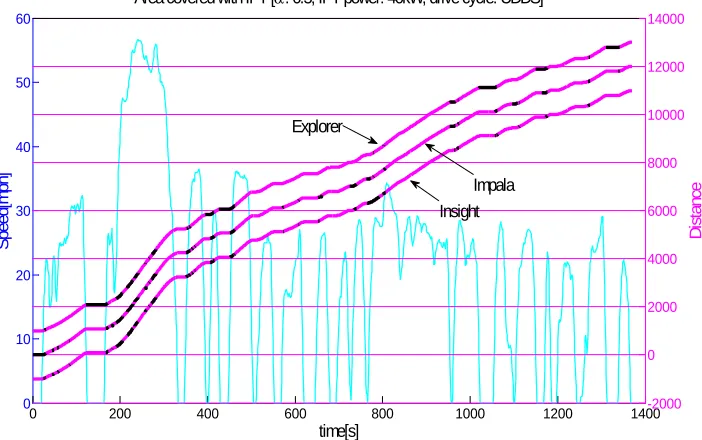
Fig. 2.3: Area covered with IPT system - optimization for different cars. ... 41
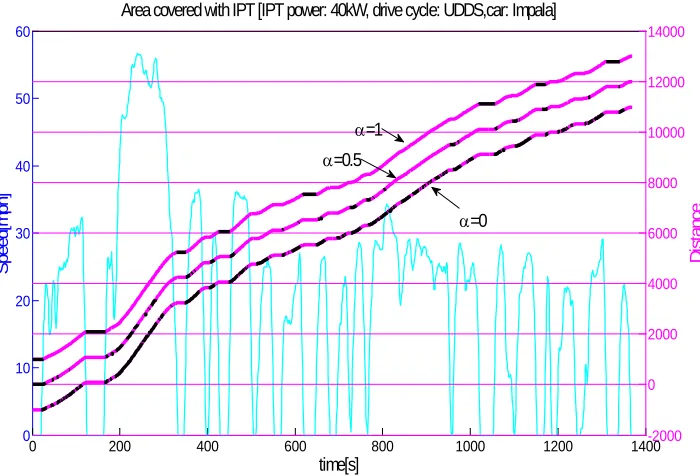
Fig. 2.4: Area covered with IPT system - optimization for different values of parameter α. ... 42
Fig. 2.5: Area covered with IPT system - optimization for different values of converter rated power. ... 42
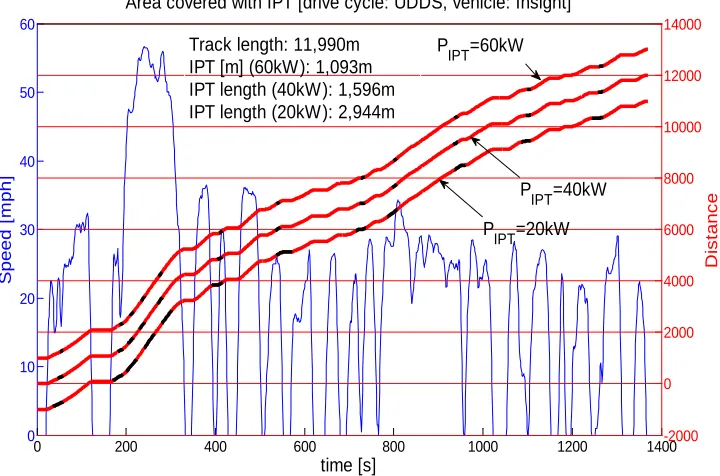
Fig. 2.6: IPT track placement for the UDDS driving cycle, Honda Insight vehicle, and different converter power ratings. ... 46
Fig. 2.7: IPT track placement for the 40kW power transfer, UDDS driving cycle, and different vehicles. ... 46
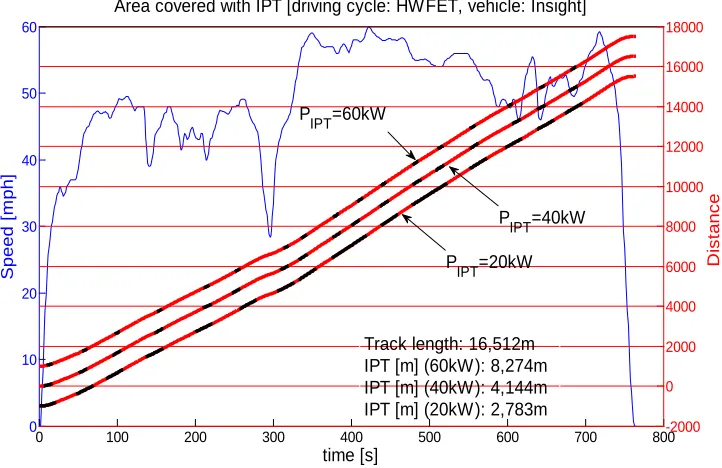
Fig. 2.8: IPT track placement for the HWFET driving cycle, Honda Insight vehicle, and different converter power ratings. ... 47
Fig. 2.9: IPT track placement for the 40kW power transfer, HWFET driving cycle, and different vehicles. ... 47
Fig. 3.1: Structure of a typical IPT system. ... 52
Fig. 3.2: A voltage-fed H-bridge. ... 56
Fig. 3.3: MOSFET switches with parasitic output capacitance. ... 57
Fig. 3.4: Switching diagrams of the resonant inverter: (a) and (b) gate pulses, (c) inverter output voltage Vinv, (d) inverter current Iinv, and (e) switches that actually conduct the current. ... 57
Fig. 3.6: Models of (a) a series compensated pick-up, (b) a parallel compensated pick-up. ... 64
Fig. 3.7: (a) and (b) gate pulses, (c) inverter output voltage for a maximum fundamental of the output voltage operational condition. ... 66
Fig. 3.8: Model of the primary of a voltage-fed IPT system. ... 66
Fig. 3.9: Series compensation with a matching transformer. ... 67
Fig. 3.10: Series-parallel LC compensation circuit. ... 69
Fig. 3.11: LC compensated primary transformed by using Norton’s theorem. ... 69
Fig. 3.12: Series-parallel LCC compensation circuit. ... 70
Fig. 3.13: Model of a voltage-fed LCC compensated primary of an IPT system. ... 71
Fig. 3.14: Simplified model of the IPT primary for the high-order harmonics. ... 76
Fig. 3.15: Demonstration of the supercritical pitchfork bifurcation for an IPT system. ... 82
Fig. 3.16: Bifurcation boundary as the function of Ls/Lt ratio and secondary quality factor Qs0 for parallel compensated secondary. ... 85
Fig. 3.17: Bifurcation boundary as the function of Ls/Lt ratio and secondary quality factor Qs0 for series compensated secondary. ... 85
Fig. 3.18: The magnitude response of transconductance G(f)=It(f)/Vinv(f)... 87
Fig. 3.19: Phase angle of admittance seen by the inverter Yinv(f) – comparison in the area around f0 for ZCS and ZPA LCC compensation. ... 87
Fig. 3.20: Trans-conductance and phase of admittance seen by the inverter at f=f0 as the function of variable coupling and load for ZCS and ZPA LCC compensations ... 89
Fig. 3.21: LCC topology inverter current (a) for ZCS compensation and (b) for ZPA compensation at the moment of switching. ... 89
Fig. 3.22: Bifurcation phenomenon demonstration for the ZCS LCC compensated resonant inverter 92 Fig. 3.23: Dynamic behavior of ZCS LCC compensated track: Power transferred to the primary (top trace), dc link current (trace in the middle), and track current (bottom trace)... 92
zoom-in showing switching instant inverter output voltage (purple trace 100V/div) and current (yellow trace 5A/div) (timescale 2μs/div); (c, f)Track voltage (upper trace 200V/div) and track
current (lower trace 20A/div) (timescale 10μs/div)... 95
Fig. 3.26: Full coupling performances for (a-c) ZSC LCC and (d-f) ZPA LCC for three different loads: (a,d) Rload=1.34 Ω, (b,e) Rload=0.72 Ω, (b,e) Rload=0 Ω; Inverter output voltage (upper trace 100V/div) and current (lower trace 10A/div or 5A/div) (timescale 10μs/div) ... 96
Fig. 3.27: Calculated and measured magnitude response of track transconductance G. ... 97
Fig. 4.1: An unregulated parallel compensated receiver. ... 104
Fig. 4.2: A regulated parallel compensated receiver (a standard boost applied for power conditioning). ... 104
Fig. 4.3: Boost controllers: (a) hysteretic controller, (b) linear controller. ... 106
Fig. 4.4: A simplified model of the parallel compensated receiver. ... 107
Fig. 4.5: Vac and Voc signals for compensated, overcompensated and undercompensated cases. ... 112
Fig. 4.8: Normalized parameters of an unregulated receiver vs detuning coefficient. ... 119
Fig. 4.9: Normalized parameters and duty cycle of a standard boost equipped pick-up vs detuning factor. ... 121
Fig. 4.10: Schematic of the automatic tuning circuit [99] - © [2008] IEEE – reused with permission. ... 122
Fig. 4.11: Power pickup with a phase-controlled variable detuning inductor [97] - © [2004] IEEE – reused with permission. ... 124
Fig. 4.12: Proposed LCL power pick-up with dSPACE-based DTC [101] - © [2009] IEEE – reused with permission. ... 127
Fig. 4.13: A tri-state boost converter - circuit diagram. ... 128
Fig. 4.14: Tri-state boost equivalent circuits for (a) "freewheeling" interval, (b) "boost" interval and (c) capacitor-charging interval. ... 129
Fig. 4.15: Tri-state boost steady state waveforms for inductor current (upper trace) and voltage (lower trace) for ideal lossless case. ... 129
Fig. 4.16: The proposed parallel compensated pick-up with a tri-state boost. ... 133
Fig. 4.17: Operation of the tri-state boost in a pick-up – signal time diagrams. ... 133
Fig. 4.19: Normalized parameters and duty cycles of a tri-state boost equipped pick-up vs detuning
factor. ... 136
Fig. 4.20: A pick-up equipped with a single phase full-bridge boost converter. ... 137
Fig. 4.21: Block diagram of the real and reactive power flow control. ... 138
Fig. 4.22: Equivalent dc circuit of the pickup with modeled inductor and capacitor losses. ... 141
Fig. 4.23: The Bode diagrams of the control-to-output transfer function for nominal load and supply conditions. ... 143
Fig. 4.24: The Bode plots of the loop gain T(s) (Phase Margin: 61.40, Cutoff Frequency: 206 Hz). . 144
Fig. 4.25: Detuning simulation test: variation of Cs and injected correction capacitance Cac. ... 146
Fig. 4.26: Detuning simulation test: output voltage Vo and rms value of the resonant voltage Vac,rms. ... 147
Fig. 4.27: Detuning simulation test: the resonant circuit voltage Vac and current Iac relative position for an overcompensated case. ... 147
Fig. 4.28: Detuning simulation test: the resonant circuit voltage Vac and current Iac relative position for an undercompensated case. ... 148
Fig. 4.29: Detuning simulation test: the switch Sb duty ratio Db and the freewheeling parameter Df,sgn. ... 148
Fig. 4.30: Load simulation test: output (load) current Io and output voltage Vo. ... 149
Fig. 4.31: Load simulation test: rms of the resonant circuit voltage Vac and current Iac . ... 149
Fig. 4.32: Load simulation test: the switch Sb duty ratio Db and the freewheeling parameter Df,sgn... 150
Fig. 4.33: Experimental setup; the distance between source and receiving coils does not correspond to the actual measurements. ... 152
Fig. 4.34: Undercompensated operational conditions (Cs<Cs0): top trace – output voltage Vo [50V/div], trace in the middle – gate signal Gf [10V/div], lower traces - Vac [20V/div] and Iac [5A/div]; time scale [4us/div]. ... 152
Fig. 4.35: Overcompensated operational conditions (Cs>Cs0): top trace – output voltage Vo [50V/div], trace in the middle – gate signal Gf [10V/div], lower traces - Vac [20V/div] and Iac [5A/div]; time scale [4us/div]... 153
Fig. 4.36: Load test - reduction of the output load from 115W to 75W: top trace – output voltage Vo [20V/div], lower traces – output current Io [0.5A/div]; time scale [100ms/div]. ... 153
Fig. 4.38: Output voltage response on reference voltage variation from 50V to 30V: top trace – output
voltage Vo [20V/div], lower traces – reference output voltage Vo,ref [20V/div]; time scale [100ms/div].
... 154
Fig. 4.39: Output voltage response on reference voltage variation from 30V to 50V: top trace – output voltage Vo [20V/div], lower traces – reference output voltage Vo,ref [20V/div]; time scale [100ms/div]. ... 155
Fig. 4.40: Transition from an undercompensated to an overcompensated resonant tank: top trace – output voltage Vo [20V/div], trace in the middle – Db [25%/div], lower traces – Df,sgn [25%/div]; time scale [100ms/div]. ... 155
Fig. 4.41: Transition from an overcompensated to an undercompensated resonant tank : top trace – output voltage Vo [20V/div], trace in the middle – Db [25%/div], lower traces – Df,sgn [25%/div]; time scale [100ms/div]. ... 156
Fig. 4.42: Pick-up response on primary signal frequency variations: : top trace – Db [25%/div], trace in the middle – Df,sgn [25%/div], lower traces – output voltage Vo [50V/div]; time scale [2s/div]. .... 156
Fig. 4.43: A demonstration of the shielding effect on the pick-up operation (the standard boost applied): upper trace – Db [25%/div], lower traces – output voltage Vo [50V/div]; time scale [1s/div]. ... 157
Fig. 4.44: A demonstration of the shielding effect on the pick-up operation (the tri-state boost applied): top trace – Db [25%/div], trace in the middle – Df,sgn [25%/div], lower traces – output voltage Vo [50V/div]; time scale [1s/div]. ... 157
Fig. 4.45: Duty cycles for the standard and tri-state boost vs detuning factor. ... 161
Fig. 4.46: Normalized power Pac, resonant voltage Vac, and resistance Rac vs detuning factor for a pick-up equipped with a standard boost. ... 161
Fig. 4.47: Normalized power Pac, resonant voltage Vac, and resistance Rac vs detuning factor for a pick-up equipped with a tri-state boost... 162
Fig. 4.48: Boost efficiency as a function of the detuning factor. ... 162
Fig. 4.49: Boost efficiencies vs output power. ... 164
Fig. 5.1: Lumped model of the resonator coil. ... 172
Fig. 5.2: Layout of transmitter and receiver coils. ... 175
Fig. 5.3: Turns numeration in a winding. ... 175
Fig. 5.4: Uniform proximity field over a conductor cross section... 177
Fig. 5.6: a) COMSOL model of a tubular conductor, b) mesh detail with boundary layer property. 182
Fig. 5.7: Resistance factor k calculated by using Rayleigh’s formula for four different values of
parameter β and t/δ as an independent variable. ... 185
Fig. 5.8: Resistance factor k calculated by using Arnold’s formula for four different values of parameter β and t/δ as an independent variable. ... 185
Fig. 5.9: Resistance factor k calculated by using Bessel functions for four different values of parameter β and t/δ as an independent variable. ... 186
Fig. 5.10: Resistance factor k calculated by using Rayleigh’s formula for four different values of parameter β and frequency as an independent variable. ... 186
Fig. 5.11: Resistance factor k calculated by using Arnold’s formula for four different values of parameter β and frequency as an independent variable. ... 187
Fig. 5.12: Resistance factor k calculated by using Bessel functions for four different values of parameter β and frequency as an independent variable. ... 187
Fig. 5.13: Current density distribution (fs=200 kHz, b=3 mm); r – distance from the center of the tube. ... 188
Fig. 5.14: AC resistance per conductor length of a single tubular conductor vs. wall thickness. ... 189
Fig. 5.15: Ratio of optimal wall thickness and skin depth for two different conductor outer radii. ... 192
Fig. 5.16: Optimal resistance factor k. ... 193
Fig. 5.17: Conductive tube and current filament [181]. ... 196
Fig. 5.18: A conductive tube and a filament in an arbitrary position. ... 199
Fig. 5.19: A tubular conductor replaced by an equivalent current filament. ... 203
Fig. 5.20: Modification of the "return" set of conductors... 210
Fig. 5.21: FEM model - current density magnitude - Configuration 1. ... 212
Fig. 5.22: FEM model - current density magnitude - Configuration 2. ... 212
Fig. 5.23: FEM model - current density magnitude - Configuration 3. ... 213
Fig. 5.24: A comparison of the analytical and FEM results of current distribution for Configuration 1. ... 213
Fig. 5.25: A comparison of the analytical and FEM results of current distribution for Configuration 2. ... 214
Fig. 5.26: A comparison of the analytical and FEM results of current distribution for Configuration 3. ... 214
Fig. 5.28: Total ac resistance for Configuration 1. ... 216
Fig. 5.29: Total ac resistance for Configuration 2. ... 217
Fig. 5.30: Total ac resistance for Configuration 3. ... 217
Fig. 5.31: A comparison of the analytical and FEM results of current distribution for Configuration 2 when the correction of the filament position is not applied. ... 218
Fig. 5.32: Current distribution for planar coil (only half of the coil is presented). ... 219
Fig. 5.33: Ac resistance of a coil with and without modification for the coil curvature - comparison with FEM results. ... 219
Fig. 5.34: Error vs number of degrees of freedom. ... 221
Fig. 5.35: Prototype coil I. ... 223
Fig. 5.36: Prototype coil II. ... 223
Fig. 5.37: A snapshot of measured values for Prototype I. ... 224
Fig. 5.38: A snapshot of measured values for Prototype II. ... 224
Fig. 5.39: Measured and analytical values – a comparative preview for Prototype I. ... 224
Fig. 5.40: Measured and analytical values – a comparative preview for Prototype II. ... 225
Fig. 5.41: Relative error between mutual inductances calculated by (5.74), (5.73) and (5.76), (5.78).. 229
Fig. 5.42: Relative error of turn length after it was approximated with a circle circumference. ... 231
Fig. 6.1: The structure of a multi-resonant receiver with an LC filter at the output. ... 236
Fig. 6.2: The structure of a multi-resonant receiver with the LC filter and the load replaced with an ideal current source. ... 238
Fig. 6.3: Receiver equivalent circuit – the rectifier, filter, and load are replaced with equivalent resistances Rac,n and Rac,k. ... 239
Fig. 6.4: Fourier expansion of the current Iac for a) mI,ac=1/3, b) mI,ac>1/3 and c) mI,ac<1/3. ... 246
Fig. 6.5: Zero-crossing angle θz, and voltage harmonic ratio mV,ac vs. current harmonic ratio mI,ac. .. 248
Fig. 6.6: Time diagrams of Iac,1 and Iac,3 for current ratio mI,ac=0.2 (Zone 2). ... 248
Fig. 6.7: Time diagrams of Voc,1, Voc,3, Vac,1, and Vac,3 for current ratio mI,ac=0.2 (Zone 2). ... 249
Fig. 6.8: Time diagrams of Iac,1 and Iac,3 for current ratio mI,ac=1 (Zone 1). ... 249
Fig. 6.9: Time diagrams of Voc,1, Voc,3, Vac,1, and Vac,3 for current ratio mI,ac=1 (Zone 1)... 250
Fig. 6.10: Time diagrams of Iac,1 and Iac,3 for current ratio mI,ac=−0.5 (Zone 3). ... 250
Fig. 6.11: Time diagrams of Voc,1, Voc,3, Vac,1, and Vac,3 for current ratio mI,ac=−0.5 (Zone 3). ... 251
Fig. 6.12: Simulation and analytical results of normalized equivalent resistances Rac,1 and Rac,3. ... 253
Fig. 6.14: Voltage harmonics vs. duty ratio D of a phase controlled inverter. ... 259
Fig. 6.15: Model of the primary (transmitter) of an IPT system. ... 260
Fig. 6.16: Detailed model of a primary with L-C-L-C compensation circuit in the form of a Cauer 1 ladder network. ... 260
Fig. 6.17: Structure of the compensation block Xcomp. ... 260
Fig. 6.18: Time diagrams of the transmitter’s signals. ... 269
Fig. 6.19: Inverter output voltage Vinv (green, 50V/div), inverter output current Iinv (purple, 5A/div), spectrum of the inverter output current Ip (orange, 1A/div). ... 271
Fig. 6.20: Inverter output voltage Vinv (green, 50V/div), primary coil current Ip (purple, 5A/div), spectrum of the inverter output current Ip (orange, 1A/div). ... 271
Fig. 6.21: Rectifier input voltage Vac (brown, 100V/div), rectifier input current Iac (purple, 2A/div), spectrum of the rectifier input current (orange, 0.5A/div), spectrum of the rectifier input voltage (purple, 25V/div),. ... 272
Fig. B.1: Illustration of the signals at the ac side of the rectifier. ... 307
Fig. B.2: Illustration of signals at dc side of rectifier. ... 307
Fig. C.1: An equivalent “dc” circuit of the pickup with the modeled inductor and capacitor losses. 310 Fig. C.2: A simplified “dc” equivalent model of the pick-up. ... 311
Fig. C.3: The equivalent circuit for the "freewheeling" conduction mode and its signal-flow graph.312 Fig. C.4: The equivalent circuit for the "boost" conduction mode and its signal-flow graph. ... 312
Fig. C.5: The equivalent circuit for the "capacitor-charging" conduction mode and its signal-flow graph. ... 313
Fig. C.6: The unified large-signal model of the pick-up. ... 313
Fig. C.7: The steady-state model of the pick-up. ... 313
Fig. C.8: The small-signal graph model of the pick-up (df=const). ... 315
Fig. C.9: A simplified small-signal graph model of the pick-up with two nested loops (df=const). . 315
Fig. C.10: A simplified small-signal graph model of the pick-up with one loops (df=const). ... 316
Fig. E.1: Time diagram of the voltages for Zone 1 operation with emphasis on zero-voltage crossings of Vac (t). ... 321
1
Introduction
The progress of technology through history does not follow one path. Instead, it is an endless collection of small contributions that push mankind forward. However, each historic period has had its own unique achievement that is slightly more notable than others. For example, the fifties were distinguished by the expansion of space research, while the end of the 20th century was distinguished by the development of personal computers and the beginning of the information age. Obviously, one of the symbols of the beginning of the 21st century is the rapid growth of wireless communication and mobility. One cannot imagine life today without cell phones, laptops, global positioning systems, and so on. Although all of these devices exchange data wirelessly over large or short distances, they are not wireless devices in a general sense, considering the fact that when you buy a new device you will find at least one set of wires in the box - the power cord cable.
A question that arises at this point is if we can apply the principles used for the wireless delivery of communication signals in order to transfer power and energy as well, since the electromagnetic waves that carry information also carry a certain amount of energy. However, there are some unique features of the systems for signal transmission that make them especially suitable for wireless delivery:
• As long as the original information is extractable from a sent signal, the attenuation of the signal is not important. It might be attenuated many thousands of times while still preserving the correct information. In this sense, digital modulation techniques are particularly robust, the same way that digital signals enhance the robustness of signals delivered through wires.
• Since the power and energy of the signals are relatively low, the efficiency of the power transfer is of secondary importance.
large as several hundreds) for signal extraction, which significantly increases acceptable signal-to-noise ratio. In addition, in this frequency range, direct physiological effects on the human body are minimal [1]. Since the penetration depth of the electromagnetic signal decreases with the square root of frequency, it is 7 cm at 100MHz, but only a couple of millimeters in the 100 GHz range [1].
In contrast to wireless information exchange, excluding very low power applications, wireless power transfer does not contain any of the features listed above: high attenuation usually means a small amount of transferred power; losses are of crucial importance and are the key parameter for wider acceptance of technology; practical frequency range is typically limited to below 200 kHz, although there are some low power prototypes that operate in the MHz range.
In the text that follows, a brief overview of the three possible methods (radiative, capacitive, and inductive) for wireless power transfer is given. At the end of the discussion, it will be clear that only inductive power transfer (IPT) has the potential to be applied for medium and high power applications, and particularly for electric vehicle charging.
1.1 Radiative Wireless Power Transfer
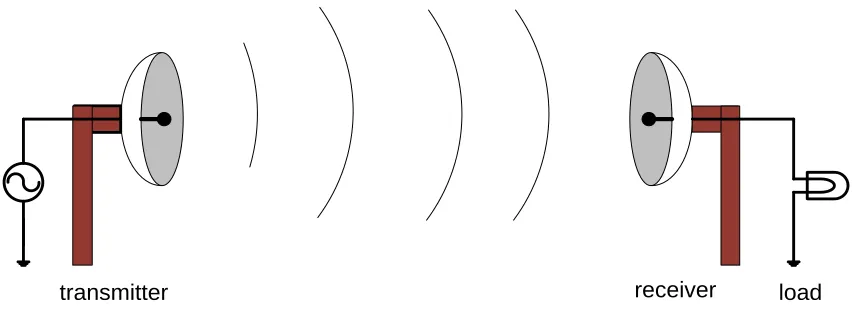
own, overwhelming the primary magnetic and electric field responsible for its origination [1]. The principles of radiative power transfer are illustrated in Fig. 1.1. The transmitter radiates electromagnetic waves, some of which are captured by the receiving antenna. Although half-wave, monopole, and loop antennas are suggested in [1] for some special applications, omni-directional radiation is highly inefficient in delivering power. It is not difficult to draw the conclusion that high directivity of the transmitting antenna is necessary, or otherwise, significant amount of energy will “miss” the receiver and efficiency will be very low. High directivity can be achieved by using high-frequency signals in the microwave range, or even higher frequencies closer to the visible spectrum by using microwave transmitters or laser beams. Microwave power transfer was proposed in the late seventies [3] and was demonstrated later [4] as a very promising way of transferring large amounts of power. However, due to the health risks associated with direct exposure to high energy microwaves, the use of this technology is limited to applications where there is no danger of human exposure [5]. Laser beams also have limited potential for wireless power transfer. The reason for this limitation is low power efficiency, mainly caused by inefficient photovoltaic cells (PVs) for light-to-electric energy conversion, and potentially high absorption of the medium between the transmitter and the receiver [6]. In order to achieve and maintain unblocked line-to-sight, complex and expensive equipment is needed. Therefore, it is especially difficult to apply this technology in a dynamic environment such as electric vehicle charging.
1.2 Capacitive Power Transfer Systems
Capacitive wireless power transfer was analyzed and demonstrated for the first time in 1891 by the famous scientist Nikola Tesla, the father of the general concept of wireless power transfer. He proved that the electrostatic field produced by two conductive sheets at a certain distance is able to deliver enough energy to illuminate an exhausted tube inserted somewhere between the sheets [7].
transmitter receiver load
Fig. 1.1: An illustration of radiative power transfer.
that, conceptually, capacitive wireless systems are very similar to conductive wired systems, except that the conductive medium that connects transmitter and receiver is replaced with a non-conductive one. Although true in general, this statement might also be misleading, since this modification significantly changes the system features.
A block diagram of a capacitively coupled contactless power transfer system is given in Fig. 1.2 [8]. In this case, power is accumulated between the capacitor plates in the form of an electric field. The capacitors are parts of an electric circuit the same way that connecting wires are parts of a wired system, and this fact makes these systems seemingly similar. The energy stored in the space between the plates can be described by the formula:
2
1 2
E= CV (1.1)
Compensation
Capacitive
coupling
Compensation
Resonant
converter
Load
Fig. 1.2. Capacitive power transfer – a typical topology [8].
systems. This differential explains the complete lack of capacitive wireless solutions on the market or in research for high power applications.
Although at first glance the capacitive coupling has lost the competition in comparison to magnetic coupling for wireless power transfer applications, some usually less highlighted features of the former might be found interesting, at least for low power systems with limited displacement between the plates:
• It is well-known that a magnetic field is unable to penetrate metal objects. Furthermore, a metal object in close vicinity to a magnetically coupled wireless power system can reduce the power transfer significantly by detuning the resonant circuits. On the other hand, capacitively coupled systems can overcome these difficulties [9].
• The leakage field of capacitively coupled systems is relatively small since the field is mostly concentrated between the plates. Therefore, electromagnetic interference (EMI) and health-related concerns are significantly reduced.
• At high frequencies (MHz range), the efficiency of capacitively coupled systems is higher than the efficiency of inductively coupled systems [10].
1.3 Inductive Power Transfer Systems
Magnetic (inductive) coupling offers significant opportunities for wireless power transfer. Inductive coupling will be the main subject of this dissertation. The word “magnetic” refers to the field that is responsible for transferring power (magnetic field), while the term “inductive coupling” suggests that power is exchanged between two inductively coupled resonators (coils). The widely used name for these systems is Inductive Power Transfer (IPT) systems. Even though it is not an entirely correct name, the same system is sometimes called a Wireless Power Transfer (WPT) system, emphasizing the prevalence of the inductive method over all other approaches. In this dissertation, we will use these terms interchangeably.
Even though the idea of the IPT system dates from the 19th century when Nikola Tesla presented his well-known Tesla coil [12], the research in this area achieved full momentum at the beginning of this century. In the last four years, manufacturers have paid more attention to this area, and they have initiated developing the new IPT standards: J2954 Standard for wireless charging of the electric vehicle [13], and the so-called Qi specification developed by the Wireless Power Consortium for low power applications (less than 5W) [14].
It is not difficult to see that terms “wireless” and “inductively coupled coils” are too general and that a refined definition of these kinds of systems is necessary. Indeed, even transformers, which process almost all electrical power in the world, comply with the definition of wireless power transfer, since they use galvanically isolated coils to couple two electric circuits. A refined definition would incorporate the following features of these systems:
may be re-applied to enhance the power transfer, but solely as the part of the primary and secondary, preserving the separation between the coils.
• Since air has much higher magnetic reluctance than ferromagnetic materials, the coupling coefficient between coils is lower than for transformers. The value of the coupling coefficient may vary from 0.7 for monorail trolley applications [15] to 0.1-0.2 for stationary charging of electric vehicles [16] and much less than 0.1 for mid-range resonant applications [17]. Therefore, these systems are usually referred to as loosely coupled systems in order to distinguish them from tightly coupled transformer coils. The theory of inductive power transfer relies on Ampere and Faraday laws. According to Ampere’s law, for the case when the displacement current is neglected:
1 1
C S
⋅ = ⋅
∫
H dl∫
J dS
, (1.2)an alternating current through the primary coils will create an alternating magnetic field over any closed contour C that encloses the primary conductors. Since the currents through all primary turns are equal, (1.2) can be simplified as:
1
1 1
C
N I
⋅ =
∫
H dl
, (1.3)which indicates that field intensity directly depends on the number of turns and the primary current. Faraday’s law states that if the secondary coil is exposed to a time varying field, an induced voltage will appear at the coil terminals:
2 2
C tS
∂
⋅ = − ⋅
∂
∫
E dl∫
B dS
, (1.4)and power will be delivered to the load.
difficult. Even though the internal structure of diagram’s blocks may vary, the topology of the most practical IPT systems comply with the block diagram given in Fig. 1.3. In the text below, the roles, the internal structure, and the characteristics of each block will be discussed. 1.3.1 Primary Converter and Compensation Circuit
Since the rate of change of the magnetic field is equal to the primary current frequency f, higher signal frequency enhances the power transfer capabilities of the system. The function of the power converter on the primary is to electronically synthesize the high frequency current and voltage at its output by using modern switching elements and converter topologies. Although there have been some attempts to achieve direct ac-ac conversion from the grid to the high frequency output [18], most topologies are based on the well-known two-stage ac-dc-ac conversion. A unity power factor stage or 3-phase line filters might be considered at the input to reduce the reactive power exchange and harmonic “pollution” of the grid. Modern IPT systems make use of voltage-fed, full-bridge resonant topologies, taking advantage of modern MOSFET and IGBT switches. Although IGBTs are more suitable for high power systems, some designers prefer to preserve the advantages of the low high-frequency losses of MOSFETs by applying modular parallel design of the primary converter [19]. The primary resonant topologies and control are discussed in Chapter 3 in much more detail.
Since the primary coil is dominantly inductive, the increase in the signal frequency will proportionally affect the total impedance of the primary coil. If the coil was connected directly to the output of the primary converter, it would require the total reactive current to be
Compensation tank HF power
supply
Compensation tank
Power conditioner
Load
Ferromagnetic
Ferromagnetic
I1
I2
supplied by the converter, increasing the VA rating of the converter several times. To alleviate this problem, a compensation circuit is regularly applied between the resonant converter and the primary coil. The compensation circuit consists of one or more reactive elements (inductors and capacitors) that are arranged in a particular formation to achieve different design goals. The proper design of the primary compensation circuit is the central topic of Chapter 3.
1.3.2 Inductively Coupled Coils
The design of the coupled coils is a critical component of the IPT system, since a non-optimal design may reduce efficiency and power transfer capabilities, and result in high leakage flux. Litz wires are typically used as the coil conductors due to their small resistance at high frequencies [20]. Some recent research promotes tubular conductors as a potential replacement for Litz wires [20]. Ferromagnetic material is used for the pads of a stationary charger to partially reroute the flux lines and reduce the total magnetic reluctance [21]. For coils at high distance, the contribution of the ferromagnetic material is negligible [22], while for the elongated primary track it might be too expensive.
1.3.3 Secondary Compensation Circuit and Power Conditioner
It is easy to derive [22] that the power transfer capability of the IPT system is directly proportional to the product of the open-circuit voltage Voc,2, and the short-circuit current Isc,2 of the secondary coil (2 in subscript refers to secondary coil):
1 2 oc,2 sc,2
S→ V I . (1.5)
Since Voc,2~N2 and Isc,2~1/N2, where N2 represents the number of turns of the secondary coil, it is easy to conclude that a variation of N2 is not able to change the power range of the system significantly. By using the compensation circuit and the resonance phenomenon at the secondary, the power capability and efficiency can be improved dramatically [23]:
1 2 oc,2 sc,2 2
S→ V I Q (1.6)
where Q2 represents the quality factor of the secondary. Typical configuration of the secondary compensation circuit (resonant tank) is similar to the primary compensation, but the criteria that lead to an optimal structure and design are different. Non-resonant, loosely coupled solutions also exist, but only for a very low power range. The argument for not using resonance at the secondary might be the elimination of tuning issues and the interaction among multiple receivers. The design of the secondary resonant tank is thoroughly discussed in Chapter 4.
novel tri-state boost-based power conditioner is the central topic of the Chapter 4.
Apart from these three main entities, the primary and the secondary are equipped with all necessary sensors and control circuits to generate the firing signals for switches and to control transferred power. Additionally, communication modules might be installed, which add a further level of intelligence and controllability to the system.
1.4 Strongly Coupled Operation Regime of the IPT System
As a figure of merit for the IPT system coupled coils design, we use the well-established parameter named magnetic link potential, which represents the product of the coil’s quality factors Qc1=L1ω/Rc1 and Qc2=L2ω/Rc2 and coupling coefficient k:
2 1 2
c c
X =k Q Q . (1.7)
Where L1 and L2 are the coil’s inductances, and Rc1 and Rc2 are their equivalent series resistances at specified signal frequency ω. A pair of resonator coils that has higher X may transfer more power more efficiently [1]. The coupled coils that have higher link potential operate in a so-called strongly coupled regime [17], [17], [25], although they have a low coupling coefficient. After recognizing this fact, scholars tried to find ways to maximize X in the design. As a result, two distinctive approaches are observed.
quality factor and efficiency. On the other hand, low frequency ensures low switching losses and efficient power conversion both on the primary and on the secondary side. A frequency range below 150 kHz is particularly attractive, since it is useful for short range inductive loop communication systems [2], and can be used for IPT as well. Due to relatively high overall efficiency and low operation frequency, this design is very common when a high amount of power should be delivered in a controllable manner. Because of the small distance between the coils, this method is usually called the short-range, near-field IPT method, and it is exclusively used for wireless charging of electric vehicles.
From (1.7) one can see that a strong coupled regime can be achieved even when the coils are very loosely coupled and k is very low (k<0.01) if the quality factors Qc1 and Qc2 are high enough. In this case, the distance between the coils is usually larger than the coil radius, and the operating frequency is far into the MHz range. This method gained enormous popularity after it had been presented and promoted by researchers from MIT in 2007 [17], [17], [25]. In terms of efficiency and range, this method represents a compromise between the far-field radiative approach and the short-range, near-field approach discussed above.
issues, and so on.
The classical near-field, near-range IPT approach offers high power capabilities, acceptable efficiency, and the possibility of tuning and power flow control. Therefore, it is recognized as the most suitable for wireless electric vehicle chargers, and the rest of the analysis in this dissertation will be based upon it.
1.5 Brief Overview of the IPT History
An overview of the most important scientific and technological achievements that shaped the history of the IPT evolution will be presented in this section. Besides the eight events selected below, there are many other unmentioned contributions that have made the IPT what it is today: a promising and fast growing technology.
The history of wireless power transfer began in 1891 when Nikola Tesla invented his famous “Tesla coil” (Fig. 1.4) that was later advanced as a “Magnifying Transmitter” [26]. Tesla coil was originally intended to be used as a generator of high amplitude, high frequency ac
voltage, while the magnifying transmitter was primarily designed for wireless power transfer. A simplified schematic of the Tesla coil is given in Fig. 1.5 [12]. As one can see, the circuit contains two loosely coupled and tuned resonant circuits: a primary and a secondary. The secondary was built by using a large single-layer solenoid. The single-layer structure significantly reduces coil resistance and increases the quality factor. An external capacitor is used to tune the primary, while the self-capacitance of the solenoid is applied to the secondary. The operation frequency used by Tesla was in the range between 20-100 kHz. Periodic spark gap discharges were used to shorten the primary resonant circuit and initiate power transfer. Even with significant spark losses, Tesla coil was able to transfer power with efficiency up to 85% [12].
Fig. 1.4: Tesla coil in Colorado Springs, USA laboratory around 1899. Author: Dickenson V. Alley, photographer at the Century Magazines, Image is Public Domain; {{PD-US}}
HV
transformer
C
1C
selfgap
Primary
res.
circuit
V
acFig. 1.5: Simplified equivalent diagram of Tesla coil.
• Tesla applied the strongly coupled resonant circuit to enhance the power transfer capability of the system,
• He used the self-capacitance to tune the secondary and to obtain a high quality factor, and
the modern resonant converters do today by using electronic switches. At the same time, it results in an effective frequency transformation from the mains frequency to high frequency of the resonant circuit.
In 1894, Hutin and LeBlanc submitted a patent [27] that describes a transformer system for electric railways. Although they named their system – a transformer, it basically represents an IPT system for street cars supplying. It contains a single-wire (unipolar) elongated primary track with 2 kHz alternating current and multiple resonant pick-ups at the secondary side. Ferromagnetic material and a suspension system that lowers pick-ups were proposed to increase mutual coupling between the track and the pick-up. Although the proposed topology has some similarities to modern solutions, its practical application was not successful.
The temporarily suspended research in the area of electric vehicles and inductive power supply has been reinstated after the energy crisis of the late seventies, when the world realized that reserves of petroleum are not unlimited. An extensive, long-term project called PATH (Partners for Advance Transit and Highways) was conducted at the University of California, Berkeley in the early nineties [28]. The goal of the project was a proof-of-concept of a roadway powered electric vehicle. For the test vehicle, a 60kW, 35-passanger bus was selected. The complete infrastructure was built for a 213 m long test track with two powered sections with total length of 120 m. A bipolar primary track was used, and it was supplied with 1200A, 400 Hz ac current. The pick-up had an area of 4.3 m2, and a 7.6 cm distance from the primary track was used. The attained efficiency was around 60%. The results of the project have proved the substantial potential of roadway powered vehicles, but the very low frequency applied has been recognized as a serious limiting factor.
At the same time, researchers at Auckland University, NZ led by Dr. John Boys and Dr. Grant Covic have focused their attention on high power applications, particularly on the inductive power supply of movable objects. They have investigated various aspects of the IPT: topologies of the primary resonant converter, compensations of the primary and pick-up circuits, the optimal control of the pick-up, the multi-phase design of the elongated primary track, the bifurcation phenomenon, and many others. It is especially worth noting their recent achievement in designing an optimal pad for the stationary charging of electric vehicles. One of the designs is a 766 mm x 578 mm pad that delivers 7 kW of power with efficiency greater than 90% for all distances that are less than 20cm, and lateral and longitudinal misalignment less than 25cm and 15cm, respectively [19], [21].
Another breakthrough in the IPT design, especially in the area of roadway powered vehicles, were results and knowledge gained from the On-Line Electric Vehicle (OLEV) project conducted at the KAIST (Korea Advanced Institute of Science and Technology) in South Korea [31], [32]. The high price, high weight, and limited range of electric batteries for electric vehicles motivated researchers to develop a roadway powered system that can reduce the required amount of batteries by 80%. Three generations of OLEV systems have been developed and three different vehicles have been tested: a light golf cart for the first generation, a bus for the second, and an SUV for the third. In each generation, a different structure of ferromagnetic material and a different track layout have been designed. Finally, preliminary goals have been achieved, at least for the second and third generation: 60 kW power transfer for the buses and 20 kW for the SUVs with efficiency of 70% and 83%, respectively; allowable vertical distance and lateral misalignment up to 16 cm and up to 20 cm, respectively; the price of the infrastructure with the inverter included was less than $400,000/km [31], [32].
theory-based proof that an efficient power transfer at these distances is possible if a strong coupling regime is provided. Particularly spectacular was the experimental part of their research which demonstrated power transfer of 60W across a 2 m distance, which is eight times larger than the coil radius. They measured coil quality factors of 950 at the operation frequency of 10.56 MHZ, and achieved 50% efficiency. Recent research proved that mid-range power transfer can be analyzed and designed by using standard lumped models of the resonators [33]. A very important step toward wider acceptance of any new technology is the standardization of topologies, design methods, and verification procedures. Recognizing the necessity of IPT systems standards for consumer low power chargers, interested companies formed a consortium named the Wireless Power Consortium to develop an international standard for interoperable wireless charging [14]. Their interest is limited to charging applications below 5W. In addition, numerous car and bus manufacturers, governmental organizations, IPT suppliers, and infrastructure companies have agreed recently to develop a new standard SAE-J2945 for standardization of IPT-based chargers for electric vehicles. This standardization will involve the following: magnetic field interoperability, alignment, communication, frequency determination, testing, validation, and so on [13].
1.6 IPT Systems for Electric Vehicle Charging
electric vehicles have an issue with the range that can be covered with state-of-the-art energy storage without the need for a recharge.
Contrary to expectations, the appearance of new and more sophisticated models of the EVs on the market did not bring a larger use of electrical energy, since still only 0.1% of the total energy consumed on U.S. highways comes from electricity [35]. According to a survey conducted by Ernst & Young in 2010 and presented in [37], the two most important factors for wider acceptance of EVs are the problem of accessing a charging station, and the battery’s short-distance driving range. This issue, termed “range anxiety,” is even more important than the higher price of EVs in comparison to conventional gasoline vehicles. The bottle-neck for further development of EVs is the price and limited characteristics of modern traction batteries. Although great improvements have been made in these areas, EVs are still very expensive. According to [38], the approximate cost of batteries of $300-650/kWh results in a total battery cost of $7500-16,250 for a 25kWh battery set. While larger, on-board battery modules may increase the range of EVs, they would also increase the price and weight of the vehicle, so a trade-off is inevitable. Even state-of-the-art Lithium Ion (Li-Ion) batteries with an energy density of more than 200 Wh/kg, would require a substantial number of battery modules per vehicle.
On the other hand, the level 1 on-board chargers cost approximately $500, and may charge with a moderate 15A current, but it takes 6-8 hours to fully charge batteries this way [39]. Although manufacturing companies do their best to simplify the charging process, full automation is not possible as driver participation is necessary, at least to connect the charging cable in the evening and disconnect it in the morning. In terms of safety, as with any other electrical device, there are some hazards related to electro shocks, loose contacts, tripping over the cable, and so on.
Based on this short overview of IPT systems, one may conclude that wireless inductive power chargers may solve or alleviate some of the issues listed above. Among IPT applications, the inductive wireless charging of electric vehicles has the greatest economic and environmental potential. In the past ten years, research of wireless inductive chargers for EVs has been developing in two directions. The first direction assumes the development of wireless substitution for the classical conductive chargers. The second direction includes research to develop a new concept of continuous, so-called, dynamic charging [19] of EVs. This approach, sometimes also called the move-and-charge (MAC) [40] concept, assumes that at least one lane in each direction of highways and local roads is equipped entirely or sporadically with an IPT system that can charge vehicle batteries continuously. In the text that follows, the main features of these two concepts will be discussed.
1.6.1 Stationary Wireless Charger for EVs
A stationary charger consists of a primary pad buried in the ground and a pick-up pad mounted underneath the vehicle, as illustrated in Fig. 1.6. The primary pad is typically sealed in rubber or covered with plastic to prevent the coil from flooding and/or other hazardous situations. It frequently contains ferromagnetic materials to shape the magnetic field, and metal rings or plates that reduce the leakage of the magnetic field [21]. The same or very similar pad structure is attached under the vehicle. The primary pad may sometimes be elevated by several centimeters to reduce the vertical distance between the coils.
vehicle directly under the primary pad. The charging station and the vehicle exchange data by using inductive or short-range communication modules [41]. This feature allows the charging station to adjust the charging procedure according to the condition of the battery or the driver’s preferences. Although initial practical applications utilized an electrical or hydraulic mechanism to lower the receiver’s pad during the charging process [28], this approach is no longer commonly used.
Power transmission varies depending on the vehicle. For example, manufacturer Conductix Wampfler proposes charging pads that transmit 3 kW at a 15 cm distance for charging automobiles and 60-100 kW for buses [41]. At the same time, the researchers from Utah State University [42] have developed a wireless charging system that transfers 5 kW power through a maximum gap of 26.6 cm for pads misalignment up to 20 cm with a grid-to-battery efficiency greater than 90%. These systems approach the efficiency of conductive charging systems.
HF POWER SUPPLY
HF POWER SUPPLY
Resonant
Tank + Power
Converter
+ +
-
-Parking Slot 2
Parking Slot 1
Guiding line
Primary coil Secondary coil
Although the lower efficiency of wireless stationary inductive charging systems might be a significant drawback, there are many characteristics that favor this approach with respect to plug-in chargers, particularly in terms of convenience and safety:
• Stationary wireless charging systems offer an automatized charging process, with no or very little action expected from the driver. This is a significant improvement in terms of convenience.
• Since the cords and cables are eliminated, the safety of the charging process is significantly improved. The chargers are vandal-proof and have almost no risk of electric sparks. Low maintenance requirements increase reliability of the charger.
• This type of charger is particularly convenient for bus applications, since they can be installed at each bus stop. Consequently, the bus would be able to recharge itself while it boards new passengers. The same would be practically impossible with conductive stationary chargers. This charging principle was applied successfully for two lanes of public transportation in Turin, Italy [43] and many other cities.
1.6.2 Dynamic Charging of EVs
Stationary wireless chargers represent a wireless equivalent for stationary conductive chargers. They offer improvements in terms of safety and convenience, but they are not able to solve or alleviate the main limitations of EVs: range anxiety and high total price of the vehicle batteries. The recently proposed dynamic charging (move-and-charge) method might be a step in the right direction. The basic idea is to charge the vehicle while it is moving by using a continuous or sporadic elongated or spotted primary track. The implementation of this concept by KAIST in Seoul, Korea and the test lane built for the PATH project (see Section 1.5) use a continuous lane to power the vehicle.
It is not difficult to see what the potential benefits of this approach would be:
reliability of EVs.
• According to the analysis in [44], the reduction of battery price by 66% of today’s value would make the price of EVs competitive to conventional gasoline-based vehicles. It is easy to see that dynamic charging can help lower the price of a vehicle by reducing the required amount of batteries. Indeed, if recharging energy is readily available, batteries do not have to support the whole driving range, but only supply power when an IPT system is not available. The authors in [45] state that, depending on power capability, the usage of dynamic charging may increase driving range by 50% and reduce the size of the battery pack by 39%.
• It is well-known that a high-charging or discharging current significantly reduces battery life [39]. Dynamic charging can extend battery life by supplying part of the motor current when it exceeds the nominal value of the battery current.
An example of an elongated track is illustrated in Fig. 1.7. As one can see, the pick-up pad is almost the same as the one used for stationary chargers. For higher power ratings, more than one pick-up is used. For example, the KAIST’s Generation 2 IPT-supplied bus carries ten 6 kW pick-ups. On the other hand, lumped coil used for stationary wireless chargers is replaced with an elongated conductive cable buried into the road. Some implementations, including the ones mentioned above, make use of ferromagnetic material at the primary to direct magnetic flux and reduce magnetic reluctance. Since misalignment for real-time driving is much higher than that of a parked car, the topology of the pick-up might be slightly redesigned to compensate for this new challenge.
Besides the unipolar and bipolar layouts of the primary track, some multi-phase systems are proposed [46] which may offer higher tolerance to misalignment. Due to unequal coupling between phases, the multi-phase bipolar system suggested in [46] requires one resonant converter per phase.
Vehicle
Pick-up
Pick-up core
Pick-up coil
Primary core
Primary coil
Roadway
Fig. 1.7: Illustration of dynamic charging concept.
loops, sectioned wire loops (car-sized sections), and small spaced loops. The authors presented a comparative case study of these layouts for five traffic intensity scenarios, including power demand and vehicle speed, and concluded that small spaced loops are optimal in terms of total conductor (copper) mass and VA rating of the supplying converter. For designs with short primary loops, the well-developed and tested pads from stationary charging can be used.
efficiency, and reducing the stray field.
The second important concern is the cost of the infrastructure for dynamic charging systems. In order for 18.5% of the road to be equipped with charging systems, the capital cost is estimated to be $1.1 M/lane mile in [38], while the additional cost of the utility power converter is projected to $185,600 for 1MW of power. However, a much lower cost of infrastructure is reported as the outcome of the KAIST project: $0.4M/lane kilometer with inverter and power rails included [32].