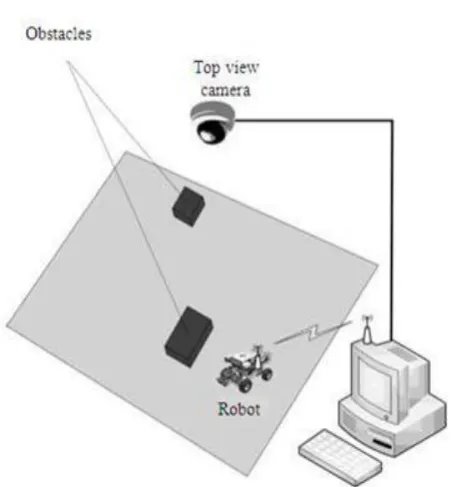
Obstacle Detection and Collision Avoidance System
Full text
Figure


Related documents
The antithesis appears in the second half of the verse in the source text: I bow down to the holy humus, / In this virgin land something is chewing, / Hey, sky-high weeds, / So
Pyloroduodenal Atresia (Diaphragm Type): An Autosomal Recessive
(a) Black circles represent original CME data (CME_raw); the red line shows an interpolated profile of the CME data into 28 GOSAT/TANSO-FTS TIR CO 2 retrieval grid layers (CME_obs);
years 1961 to 1965 no congenital syphilis was seen at the Children’s Hospital Medical. Center in Boston; in 1966
The main findings of this work are: (1) the development of fintech clusters to classify core services, business infrastructures and underlying component technologies,
In this study, we examined the therapeutic potential of localized release of diclofenac from electrospun nanofibers generated from poly( d , l -lactide-co-glycolide)
Linking Forests to markets: chain of custody certification under the Forest Stewardship
In the process, we obtain a threshold rate (as a function of data-block length, channel memory, and number of antennas) below which the full spatial-temporal diversity is
