II. TINJAUAN PUSTAKA
A.Unmanned Aerial Vehicle (UAV)
Unmanned Aerial Vehcle (UAV) atau disebut wahana udara tak berawak merupakan sebuah wahana terbang yang mempunyai kemampuan dapat beroperasi tanpa adanya
pilot didalam wahana tersebut.
UAV merupakan wahana udara tak berawak yang salah satu pengoperasiannya
dengan cara dikendalikan dari jarak jauh. UAV dapat berupa, pesawat atau helikopter
yang menggunakan sistem navigasi mandiri. Pada dasarnya pesawat, atau helikopter
dapat dipertimbangkan untuk menjadi kendaraan udara yang dapat melakukan misi
yang berguna dan dapat dikendalikan dari jauh atau memiliki kemampuan terbang
secara automatis.[1]
Departmen Pertahanan Amerika Serikat mendefinisikan UAV sebagai wahana udara
yang tidak membawa pilot, menggunakan sifat aerodinamis sebagai daya angkat,
Gambar 2.1 Perahu boat Nikola Tesla [http://www.tfcbooks.com]
Demonstrasi perahu boat (Gambar 2.1) yang dikendalikan dari jauh oleh Nikola Tesla pada tahun 1898 merupakan awal dari diciptakannya RC (Radio Control) yang menjadi perintis berkembangnya teknologi UAV sampai saat ini. Dalam beberapa
abad terakhir, UAV telah digunakan diberbagai bidang antara lain, bidang pertanian,
meteorologi, hingga riset untuk kepentingan militer.
1. Manfaat UAV
Hingga saat ini UAV umumnya digunakan untuk kepentingan militer. namun
demikian UAV juga dapat digunakan untuk kepentingan manusia seperti survei udara
dan sipil yang sangat diperlukan oleh pemerintah maupun pihak swasta di Indonesia.
Biaya survei udara dengan pesawat tanpa awak jauh lebih hemat dibandingkan
dengan pesawat berawak. Tingkat resiko yang dimiliki juga sangat rendah, terutama
apabila diperlukan pengamatan atau pengintaian daerah konflik dan berbahaya.
dapat menghasilkan foto udara yang sangat teliti hingga skala 1:1000.[2] Berikut ini
adalah beberapa contoh manfaat UAV untuk kepentingan kemanusiaan :
a. Pengawasan hutan dapat dilakukan secara berlanjut dan terus menerus, sehingga
dapat mengurangi kegiatan pembalakan liar.
b. Dapat mengawasi lalu lintas jalan yang rawan akan kemacetan, sehingga
antisipasi kemacetan dapat dilakukan lebih dini.
c. Dapat melakukan pencarian maupun penyelamatan didaerah-daerah yang sedang
terjadi bencana, terutama yang sulit dijangkau oleh manusia, seperti kebakaran
hutan, banjir, gempa bumi, dan tanah longsor.
d. Pengawasan dan pemeliharaan jalur pipa yang memiliki jarak beratus-ratus mil
dengan melewati daerah-daerah yang terisolir membutuhkan biaya yang besar dan
tenaga manusia yang banyak. Kerusakan yang tidak terdeteksi atau sabotase katup
dapat menimbulkan bencana lingkungan dan kerugian dalam hal biaya. Hal ini
dapat dilakukan dengan menggunakan UAV sebagai pipeline patrol.[3]
e. Pengambilan gambar dari udara untuk menganalisis keadaan tanah menggunakan
pencitraan mutispectral. September 2002, UAV Pathfinder-Plus digunakan untuk mengumpulkan pencitraan multispectral resolusi tinggi mengenai suatu tempat dari perkebunan kopi Kauai, perkebunan kopi terbesar di Amerika. Sistem
pencitraan dari dua kamera digital akan dianalisa untuk pemetaan ladang kopi
yang telah masak, untuk identifikasi masalah pengairan dan perkembangan
Begitu besarnya peran UAV untuk kepentingan kemanusiaan, sehingga UAV dapat
digunakan untuk membantu pekerjaan-pekerjaan yang membutuhkan pengawasan
dan memiliki resiko yang besar untuk dilakukan.
2. Bagian-bagian penyusun UAV [3]
Secara umum sistem UAV dibentuk oleh beberapa bagian yang saling berinteraksi,
seperti pesawat, dan stasiun kontrol bumi.
Gambar 2.2 Sistem UAV secara umum
Pesawat merupakan bagian terpenting dari UAV itu sendiri. Adapun bagian penyusun
Gambar 2.3 Bagian-bagian dari wahana udara tak berawak
A = Autopilot kontrol
B = Baterai
D = Datalink radio modem dan antena G = Penerima GPS
I = Sensor IR
M = Motor dan kontrol
R = Penerima RC dan antena
S = Servo
P = Payload, kamera dan pemancar video
3. UAV berdasarkan konfigurasi Airframe
Jika dilihat dari konfigurasi airframe, UAV dapat dibedakan menjadi 2 jenis yaitu
fixed-wing dan rotary-wing. Fixed-wing merupakan UAV yang bentuk sayapnya merupakan sudah tetap dan merupakan komponen gerak dari pesawat tersebut, untuk
jenis Rotary-wing merupakan UAV yang komponen geraknya berupa baling-baling yang berputar (rotor). Berikut adalah contoh fixed-wing dan rotary-wing:
Gambar 2.4 Rotary wing (atas) dan fixed-wing (bawah)
B. Multirotor/Multicopter UAV
Multirotor merupakan salah satu UAV yang dengan konfigurasi rotary-wing. Pada multirotor sistem penggerak menggunakan 2 rotor atau lebih. Kontrol gerak
dihasilkan dengan mengatur kecepatan rotor untuk mengubah torsi dan gaya dorong
Dalam perkembangannya hingga saat ini, UAV dengan jenis multirotor memiliki
perbedaan dalam banyaknya penggunaan rotor. Adapun jenis-jenis tersebut adalah
sebagai berikut:
1. Bicopter
Adalah salah satu jenis multirotor dengan jumlah rotor yang digunakan adalah 2 buah
dengan tambahan 2 buah motor servo sebagai kontrol gerakan pada wahana ini. Berikut adalah konfigurasi pada bicopter:
Gambar 2.5 Konfigurasi pada Bicopter
Sistem kendali pada bicopter yakni dengan mengatur arah kedua buah motor dengan
motor servo dan mengatur kecepatan kedua buah motor tersebut, dengan pengaturan sebagai berikut:
a. Forward : kedua buah servo digerakan kearah depan b. Back : kedua buah servo digerakan kearah belakang c. Turn left : M1 dikurangi kecepatannya, dan M2 ditambah
M2 direction M1 direction Forward
d. Turn right : M2 dikurangi kecepatannya, dan M1 ditambah
2. Tricopter
Adalah salah satu jenis multirotor dengan jumlah rotor yang digunakan adalah 3 buah
dengan tambahan 1 buah motor servo sebagai kontrol gerakan pada wahana ini. Berikut adalah konfigurasi pada tricopter:
Gambar 2.6 Konfigurasi pada Tricopter
Sistem kendali pada tricopter yakni dengan mengatur arah motor M3 dengan motor
servo dan mengatur kecepatan kedua buah motor tersebut, dengan pengaturan sebagai berikut:
a. Forward : M1 dan M2 dikurangi kecepatannya, M3 ditambah b. Back : M1 dan M2 dikurangi kecepatannya, M3 ditambah
M1 M2
c. Turn left : M1, M2, dan M3 berputar pada kecepatan yang sama, dan
servo diarahkan kekanan
d. Turn right : M1, M2, dan M3 berputar pada kecepatan yang sama, dan
servo diarahkan kekiri
3. Quadcopter/Quadrotor
Adalah salah satu jenis multirotor dengan jumlah rotor yang digunakan adalah 4 buah
sebagai kontrol gerakan pada wahana ini. Quadcopter atau quadrotor, berdasarkan
sistem konfigurasinya dibedakan atas quadcopter P dan quadcopter X, dapat dilihat
pada berikut:
Gambar 2.7 Konfigurasi pada quadcopter P
M1
M2
Sistem kendali pada quadcopter P yakni dengan mengatur kecepatan masing-masing
motor sehingga menimbulkan torsi yang berbeda, dengan pengaturan sebagai berikut:
a. Forward : M2 dan M4 berputar pada kecepatan yang sama, M1 dengan kecepatan lebih rendah dibanding M3
b. Back : M2 dan M4 berputar pada kecepatan yang sama, M3 dengan kecepatan lebih rendah dibanding M1
c. Turn left : M1 dan M3 berputar pada kecepatan yang sama, M4 dengan kecepatan lebih rendah dibanding M3
d. Turn right : M1 dan M3 berputar pada kecepatan yang sama, M3 dengan kecepatan lebih rendah dibanding M4
[image:10.612.215.417.384.596.2]Pada quacopter X konfigurasi dapat dilihat pada gambar berikut:
Gambar 2.8 Konfigurasi pada quadcopter X
Sistem kendali pada quadcopter X yakni dengan mengatur kecepatan masing-masing
motor sehingga menimbulkan torsi yang berbeda, dengan pengaturan sebagai berikut:
M2 M1
a. Forward : M1 dan M2 berputar kecepatan lebih rendah dibanding M3 dan M4
b. Back : M3 dan M4 berputar kecepatan lebih rendah dibanding M1 dan M2
c. Turn left : M1 dan M3 berputar kecepatan lebih rendah dibanding M2 dan M4
d. Turn right : M2 dan M4 berputar kecepatan lebih rendah dibanding M1 dan M3
4. Heksacopter
Adalah salah satu jenis multirotor dengan jumlah rotor yang digunakan adalah 6 buah
sebagai kontrol gerakan pada wahana ini. Adapun konfigurasi pada hexacopter adalah
sebagai berikut:
M5
M3 M4
M6 M2
Gambar 2.9 Konfigurasi pada heksacopter
Sistem kendali pada heksacopter yakni dengan mengatur kecepatan masing-masing
motor sehingga menimbulkan torsi yang berbeda, dengan pengaturan sebagai berikut:
a. Forward : M1, M2, M6 berputar dengan kecepatan yang lebih rendah dibandingkan dengan kecepatan M3, M4, dan M5.
b. Back : M3, M4, M5 berputar dengan kecepatan yang lebih rendah dibandingkan dengan kecepatan M1, M2, dan M6.
c. Turn left : M1, M2, M3, dan M4 berputar kecepatan lebih rendah dibanding M5 dan M6.
d. Turn right : M1, M6, M5, dan M4 berputar kecepatan lebih rendah dibanding M2 dan M3.
Pada penelitian ini, menggunakan multirotor quadcopter , dikarenakan quadcopter
memiliki beberapa keunggulan sebagai berikut:
1. Biaya lebih murah dibandingkan dengan hexacopter.
2. Memiliki efisiensi yang lebih lama dibandingkan hexacopter.
3. Memiliki daya angkut payload lebih besar dibandingkan bicopter, dan tricopter.
4. Mudah dioperasikan.
5. Memiliki kestabilan yang lebih baik dibanding bicopter dan tricopter.
C. Quadrotor/Quadcopter [5]
Quadrotor memiliki 4 buah motor yang masing-masing dapat bergerak bersamaan
(satu tempat ke tempat lain) dibutuhkan diferensial kecepatan pada motor quadrotor.
Karena prinsip kerja dari pergerakan quadrotor bertitik pada kecepatan motor
masing-masing sisi.
Gambar 2.10 Quadrotor helikopter dikontrol dengan memvariasikan . (a) Pitch dan roll sehingga
torsi yang dihasilkan secara independen dengan mengontrol kecepatan relatif dari rotor pada sisi
berlawanan helikopter. (b) torsi yaw dihasilkan dengan mengendalikan kecepatan relatif motor, yang
berputar terbalik untuk menghasilkan reaksi torsi total yang berbeda-beda pada tiap motor.
Percepatan vertikal dikendalikan oleh kecepatan total dari semua rotor, dan
percepatan lateral dikendalikan melalui pitch dan roll pesawat.[5] Torsi dihasilkan oleh rotor dengan persamaan berikut:
Q = Kq.I (2.1)
V = RaI+Keω (2.2)
Dimana Q adalah torsi yang dihasilkan dari rotor, V adalah tegangan yang melewati rotor, I adalah arus yang berada di rotor, dan ω adalah sudut yang dihasilkan ketika rotor berputar. Kq, Ke,dan Ra merupakan konstanta dari spesifikasi motor yang
digunakan, dimana Kq adalah torsi motor, Ke adalah kecepatan motor yang berkaitan
dengan EMF, dan Ra adalah resistansi total dari rotor.
Konversi dari tegangan kedalam bentuk daya, menghasilkan:
(2.3)
Dimana torsi dapat disamakan dengan daya yang dihasilkan oleh motor dengan daya
yang ideal untuk menghasilkan daya dorong dan meningkatkan momentum diudara.
Daya ideal adalah torsi motor yang dikalikan dengan kecepatan motor tersebut. Pada
saat hover atau mengudara, daya didapat dengan:
P = Tvh (2.4)
Dimana vh, merupakan kecepatan induksi motor pada saat hover, yaitu perubahan
kecepatan udara yang disebabkan oleh baling-baling. Pada penerbangan umum
dilambangkan dengan vi.
(2.5)
Dimana T merupakan gaya dorong yang dihasilkan untuk tetap hover, A=ᴫR2 adalah daerah yang terkena turbulensi oleh rotor, ρ adalah massa jenis udara, dan R adalah jari-jari quadrotor. Hubungan antara tegangan dan gaya dorong didapatkan dengan
menyamakan daya yang dihasilkan dengan daya ideal ketika hover, sehingga menghasilkan: (2.6) Sehingga, (2.7)
Sama seperti helikopter konvensional, sebagian besar sifat aerodinamis dari
quadcopter dipengaruhi oleh rotor, keadaan alam dan efisiensi daya. Riset di
Australian National University menunjukkan bahwa kinerja rotor pada helikopter dapat diperoleh dari teori momentum rotor. Kinerja ini sangat penting bahwa wahana
rotary-wing harus mampu menghasilkan gaya dorong yang cukup mampu melawan setiap hembusan eksternal pada rangka untuk menstabilkan wahana, serta mampu
membwa payload peralatan seperti kamera, sensor, dan kontroler. Ada lima variabel yang mempengaruhi aerodinamis pada rotor, yaitu:
1. FIGE yaitu variasi dari koefisien thrust saat rotor berada dekat dengan
permukaan tanah (ground).
2. H yaitu gaya horizontal yang timbul karena propeller.
3. RM yaitu rolling moment, kombinasi dari kondisi ketika gabungan lift
sepanjang radius rotor.
4. T yaitu thrust atau gaya dorong.
[image:15.612.218.414.532.648.2]5. Q yaitu moment perpindahan atau pergeseran. Kelima variabel tersebut dapat di lihat pada gambar berikut:
E. Lift Force Pada Rotor
Lift atau daya angkat biasanya berhubungan dengan sayap dari sebuah model airfoil fixed-wing, namun lift juga dapat dihasilkan oleh propellers, laying-layang, helikopter, perahu layar bahkan pada bentuk dari sebuah mobil. Lift pada dasarnya berarti usaha angkat untuk melawan gravitasi. Ada beberapa teori untuk menjelaskan
lift, antara lain Prinsip Bernoulli yang menjelaskan bahwa aliran udara merupakan energi yang konstan, ketika udara mengalir pada bagian yang memiliki tekanan udara
rendah, maka aliran udara tersebut akan semakin cepat.[7]
Dari Prinsip Bernoulli, tekanan udara pada bagian atas bergerak lebih cepat dengan
demikian tekanan menjadi rendah dibandingkan dengan bagian bawah yang aliran
udaranya bergerak lebih lambat. Perbedaan tekanan udara tersebut menghasilkan
gaya aerodinamik.
Pada Hukum Newton tentang Lift and deflection of the flow, lift dihasilkan karena adanya tekanan udara dan gaya tekan dari area wing, bahwa tekanan dari luas wing
tidak menghasilkan gaya yang murni, akan tetapi dibutuhkan perbedaan tekanan
untuk menghasilkan lift.[8]
(2.8)
Keterangan:
ρ = massa jenis udara (1.225 Kg/m3)
v = kecepatan (m/s)
A = luas sayap (m2)
CL = koefisien lift didapat dari angle of attack Mach number dan Reynolds
number[10]
Pada rotary-wing lift tidak dihasilkan oleh wing tapi dari propeller yang berputar. Sehingga rotary-wing mampu hover, sehingga A merupakan luas lingkaran yang dihasilkan dari propeller dimana A=2ᴫr2, r merupakan jari-jari propeller. Dan untuk
CL saat hover memiliki angle of attack dengan sudut 0º, sehingga CL pada saat hover
adalah 0.1.[11]Pada rotaty wing v yang dihasilkan adalah kecepatan putar motor per detik pada pitchpropeller:[12]
(2.9)
Keterangan:
n = kecepatan rotasi motor (rev/sec)
pitch = propeller pitch (meter)
F. Brushless Motor [12]
Brushless Motor adalah jenis motor yang memiliki konstruksi magnet permanen dan sebuah stator berkutub yang dililit kawat. Energi listrik diubah menjadi energi
stator berkutub yang dililit kawat tembaga. Bagian-bagian brushless motor adalah sebagai berikut:
a. Stator
Dasar dari stator brushless motor adalah sebuah stator dengan memiliki tiga buah gulungan.
b. Rotor
Rotor pada brushless motor terdiri dari beberapa magnet permanen. Jumlah kutub magnet di rotor juga mempengaruhi ukuran langkah dan riak torsi dari
motor. Jumlah kutub yang banyak akan memberikan gerakan presisi dan riak
torsi yang kecil. Magnet permanen terdiri dari 1 sampai 5 pasang kutub.
Dalam kasus tertentu bisa 8 pasang kutub.
Gambar 2.12 Tiga Kumparan Stator Tiga Fasa Dan Rotor Motor DC Brushless.[12]
Rotor dari motor DC brushless lebih ringan dari pada rotor dari motor DC konvensional yang universal di mana kumparan ditempatkan pada rotor. Untuk
mengontrol kecepatan brushless motor maka dibutuhkan Electrical Speed Control
(ESC). ESC merupakan perangkat penting dalam bidang RC aeromodelling, dikarenakan ESC adalah perangkat yang mengatur jumlah daya yang masuk ke motor
sinyal dari receiver dan bekerja untuk memberikan variasi dalam kecepatan motor dan arah dan dapat bertindak sebagai mekanisme pengereman. Berikut adalah
diagram dari ESC dan brushless motor:
Gambar 2. 13 Diagram sederhana brushless motor, ESC, receiver dan baterai
Sinyal pada ESC berupa sinyal Pulse Width Modulation (PWM), yang berarti untuk mengontrol kecepatan motor (RPM) maka ESC memvariasikan sinyal PWM sesuai
dengan RC transmitter. Berikut adalah bentuk sinyal PWM pada ESC dalam mengontrol kecepatan motor:
Gambar 2. 14 Sinyal PWM pada ESC
Pada brushless motor tegangan yang dikontrol oleh ESC berjumlah 3 fasa AC motor sinkron. Tiga tegangan berganti-ganti diterapkan pada stator kumparan berurutan
oleh rotor. Maka dibutuhkan ESC khusus untuk mengubah tegangan DC pada baterai
menjadi tiga pulsa tegangan dengan frekuensi 120º. Berikut adalah 3 pulsa tegangan
[image:20.612.248.393.509.648.2]dengan beda frekuensi tiap fasa 120º:
Gambar 2. 15 Sinyal pulsa dari ESC Brushless Motor
G. Global Positioning System (GPS)
Global Positioing System (GPS) adalah jaringan satelit yang terdiri dari sekitar 24 satelit yang mengelilingi bumi sebanyak dua kali sehari pada ketinggian 11.000
mil.[13]
GPS dikembangkan oleh United States Department of Defense (DOD) untuk kepentingan militer. Setelah beberapa tahun berlalu GPS telah terbukti dapat berguna
untuk kepentingan umum yang bukan militer.[14]
Gambar 2. 21 Pembacaan posisi pada bumi menggunakan GPS.[15]
1. Tiga bagian dari GPS [13]
Sistem NAVSTAR (Navigation Satelit Timing and Ranging, nama resmi departemen pertahanan amerika untuk GPS) terdiri dari bagian luar angkasa (satelit), bagian
Gambar 2.22 Tiga bagian dari GPS[13]
a. Bagian luar angkasa
Bagian luar angkasa terdiri dari 24 satelit yang merupakan jantung dari sistem.
Dengan mengorbit sekitar 11,000 mil di atas permukaan bumi, sinyal dari satelit
dapat mencakup daerah yang lebih luas. Satelit disusun pada masing-masing orbitnya,
sehingga penerima GPS di bumi dapat selalu menerima setidaknya empat satelit pada
setiap waktu.
Satelit bergerak pada kecepatan 7000 mil/jam, yang menjadikan satelit dapat
mengelilingi bumi dalam waktu 12 jam. Sumber tenaga berasal dari energi matahari
dan dapat tahan hingga 10 tahun. Jika energi matahari gagal, satelit memiliki baterai
cadangan untuk menjaga satelit tetap bergerak. Satelit juga memiliki roket pendorong
Setiap satelit memancarkan sinyal radio berkekuatan rendah pada beberapa frekuensi
(ditandai dengan L1, L2, dan lainnya). Penerima GPS untuk sipil menerima frekuensi
L1 pada 1575,42 MHz (UHF). Sinyal akan menjalar seperti pandangan yang artinya
sinyal akan dapat melewati awan, kaca, dan plastik, tetapi tidak dapat melewati objek
[image:23.612.223.420.249.456.2]padat seperti bangunan dan pegunungan.
Gambar 2. 23 Satelit NAVSTAR[13]
L1 berisi dua sinyal pseudorandom, kode pelindung (P) dan kode coarse/acquisition
(C/A). Masing-masing satelit mengirimkan kode yang unik, yang menjadikan
penerima GPS dapat mengidentifikasikan sinyal.
Fungsi utama dari pengkodean sinyal ini adalah untuk perhitungan waktu tempuh dari
satelit ke penerima GPS di bumi. Waktu tempuh ini juga dapat dikatakan waktu
satelit (jarak antara satelit dengan penerima GPS). Pesan navigasi berisi orbit satelit,
informasi waktu, dan status dari sistem umum lainnya.
b. Bagian kontrol
Sesuai dengan namanya, bagian ini befungsi untuk mengendalikan satelit GPS
dengan cara mengawasinya dan memberikan informasi orbit dan waktu. Terdapat
lima stasiun kendali yang berlokasi di seluruh dunia, empat stasiun pengawas tanpa
awak dan satu stasiun kontrol utama. Empat stasiun penerima tanpa awak
terus-menerus menerima data dari satelit yang kemudian mengirimnya ke stasiun kendali
utama. Stasiun kendali utama mengkoreksi data satelit dan bersama-sama dengan dua
antena lainnya mengirim (uplink) informasi data ke satelit GPS.
c. Bagian pengguna
Bagian ini yang akan mendapatkan informasi koordinat posisi pada bola bumi
melalui penerima GPS.
2. Penerima GPS [16]
Setiap pengguna yang memiliki penerima GPS dapat menerima sinyal satelit untuk
menetukan dimana posisinya berada. Penerima GPS menerima dua data dari satelit
NAVSTAR, yaitu data almanac dan ephemeris.
satelit dengan penerima. Penerima GPS menghitung jarak ke satelit dengan
menggunakan sinyal dari satelit.
Dengan menggunakan rumus :
c
S (2.10)
Di mana:
S = jarak (m)
τ = waktu sinyal yang diterima oleh penerima (s)
c = kecepatan cahaya (m/s)
Penerima GPS dapat menghitung jarak satelit. Sinyal radio bergerak pada kecepatan
cahaya (186.000 mil perdetik). Penerima GPS harus mengetahui berapa lama waktu
yang dibutuhkan sinyal radio untuk bergerak dari satelit ke penerima. Baik satelit dan
penerima GPS, keduanya menghasilkan rangkaian kode pseudo-random yang sama. Ketika penerima menerima kode yang dikirimkan, ini akan menentukan berapa
banyak kode yang harus digeser untuk dua rangkaian kode menjadi sesuai.
Pergeseran dikalikan dengan kecepatan cahaya untuk menentukan jarak dari satelit ke
penerima.
Penerima GPS memerlukan beberapa data untuk mendapatkan informasi posisi.
Minimal tiga sinyal satelit yang dibutuhkan untuk mendapatkan posisi. Empat sinyal
Terdapat bermacam-macam tipe penerima GPS, secara umum dibagi menjadi 5,
yaitu:
a. Model kosumen
Penerima GPS yang dijual bebas, mudah untuk digunakan, lebih banyak
digunakan untuk rekreasi dan penggunaan lainnya yang tidak membutuhkan
posisi dengan presisi tinggi.
b. Model militer U.S./pemerintah
Unit GPS yang dapat menerima kode-P dan kode-Y yang tersedia hanya
untuk pemerintah. Unit GPS portabel ini adalah PLGRs (Precision Lightweight GPS Receivers). Generasi pertama dari PLGRs berukuran besar berbentuk kotak dan memberikan akurasi dalam empat meter. DAGRs
(Defense Advanced Global Positioning System Receivers) merupakan penerima GPS yang baru, ukuran lebih kecil, lebih akurat, dan memiliki fitur
pemetaan seperti unit GPS konsumen.
c. Model pemetaan
Penerima portabel ini mengumpulkan data lokasi titik, garis, dan area yang
akan dimasukkan ke SIG (sitem infomasi geografis). Unit ini lebih presisi
dibandingkan dengan model konsumen, dapat menyimpan data lebih banyak,
dan lebih mahal.
d. Model survei
Unit ini banyak digunakan untuk survei tanah, dimana tingkat akurasi hingga
dengan jumlah yang besar. Berukuran besar, rumit dalam penggunaan dan
sangat mahal.
e. Model tranportasi komersil
Penerima ini tidak dirancang untuk dibawa-bawa, tetapi dipasang pada
pesawat, kapal, dan mobil. Unit ini memberikan informasi navigasi yang tepat
untuk mode tranportasi. Penerima ini dapat merupakan bagian APRS
(Automated Position Reporting System) yang mengirimkan lokasi kendaraan ke fasilitas pengawas.
3. Cara kerja GPS[17]
Setiap satelit GPS mengirimkan dua sinyal, Precise Positioning System (PPS) dan
Standar Positioning System (SPS). Sinyal PPS dienskripsi dengan kode akses militer, sedangkan SPS tidak dienskripsi. Pengrirman kode informasi menggunakan
gelombang mikro dengan frekuensi 1575,42 MHz. Tidak seperti sinyal yang berasal
dari bumi, sinyal SPS lebih tahan dari interferensi waktu malam, dan tidak
dipengaruhi oleh cuaca dan noise elektris.
Sinyal SPS terdiri dari dua tipe data orbit, almanac, dan epheremis. Data almanac
berisi kekuatan sinyal dan perkiraan lokasi dari setiap satelit pada sistem. Penerima
GPS mengumpulkan data almanac dari satelit yang ada, yang kemudian menggunakannya untuk menentukan lokasi satelit yang seharusnya dapat dilihat dari
Penerima GPS menerima sinyal dari tiga atau empat satelit pada saat yang sama dan
menentukan posisi fix dengan menggunakan interval antara pengiriman dan
penerimaan dari sinyal satelit. Tiga satelit dibutuhkan untuk posisi dua dimensi.
Posisi dua dimensi hanya menunjukkan posisi. Empat satelit dibutuhkan untuk posisi
tiga dimensi, yang menunjukkan posisi dan elevasi.
Gambar 2. 24 Pengiriman dan penerimaan sinyal GPS. [17]
4. Menetukan posisi pada bidang datar [15]
Dua satelit jauh di atas bumi berputar mengelilingi bumi mengririmkan data posisi
dan waktunya masing-masing. Dengan menggunakan waktu yang dibutuhkan sinyal
untuk sampai ke penerima, kita dapat menggambarkan dua lingkaran dengan radius
S1 dan S2 disekitar satelit. Posisi dapat ditentukan dari perpotongan kedua lingkaran
Gambar 2.25 Posisi penerima pada perpotongan dua lingkaran[15]
Pada kenyataannya, posisi harus ditentukan dalam bidang tiga dimensi, daripada
bidang datar. Perbedaan antara tiga dimensi dengan bidang datar adalah bidang tiga
dimensi terdiri dari dimensi tambahan, yaitu tinggi (Z), satelit tambahan ketiga
dibutuhkan untuk menentukan posisi yang benar. Jika jarak satelit ketiga diketahui,
semua kemungkinan posisi terletak pada ketiga permukaan dari bola lingkaran. Posisi
Gambar 2.26 Posisi yang ditentukan dari perpotongan tiga bola lingkaran[15]
5. Menetukan posisi pada bidang tiga dimensi [15]
Untuk dapat memperoleh posisi dalam bentuk tiga dimensi, maka setidaknya
dibutuhkan empat satelit yang berbeda. Semua satelit GPS beredar pada orbitnya
[image:30.612.231.409.233.418.2]masing-masing sehingga, setidaknya empat satelit dapat terlihat oleh penerima GPS.
Gambar 2.27 Empat satelit dibutuhkan untuk menentukan posisi dalam tiga dimensi[15]
Untuk dapat mengetahui posisi, penerima GPS harus menerima waktu sinyal dari
empat satelit yang berbeda untuk menghitung waktu perjalanan sinyal (Δt1 – Δt4)dari
Gambar 2.28 Perbedaan waktu antara pengiriman dan penerimaan sinyal[15]
Perhitungan dilakukan pada kartesian, sistem koordinat tiga dimensi dengan origin
titik pusat bumi (gambar 35). Jarak pengguna dari empat satelit R1, R2, R3, dan R4
dapat ditentukan dengan bantuan waktu perjalanan sinyal Δt1, Δt2, Δt3, dan Δt4 antara
empat satelit dan pengguna. Selama lokasi Xsat, Ysat, dan Zsat dari empat satelit
diketahui, koordinat pengguna dapat dihitung.
Gambar 2.29 Sistem koordinat tiga dimensi[15]
disinkronisasikan dengan satelit lainnya dan koordinat waktu universal. Clock
penerima tidak disinkronisasikan dengan Universal Time Co-ordinated (UTC) dan akan menjadi lebih lambat atau lebih cepat dengan Δt0. Tanda Δt0 positif pada saat
clock pengguna lebih cepat. Resultan kesalahan waktu Δt0 menyebabkan ketidakakurasian pada pengukuran waktu perjalanan sinyal dan jarak R. Sebagai
hasilnya, kesalahan jarak yang diukur diketahui sebagai jarak pseudo atau PSR (pseudo-range).
0 t t tmeasured
(2.11)
t t
c ct
PSR measured 0 (2.12)
c
t
R
PSR
0
(2.25) R : jarak satelit dari penggunac : kecepatan cahaya
Δt : waktu perjalanan sinyal dari satelit ke pengguna
Δt0 : perbedaan clock satelit dengan clock pengguna
PSR : pseudo-range
Jarak R dari satelit ke pengguna dapat dihitung pada sistem kartesian sebagai berikut :
2
2
2user Sat user
Sat user
Sat X Y Y Z Z
X
R (2.13)
Kemudian masukkan persamaan 2.11 ke persamaan 2.10
t cPSR XSatXuser 2 YSatYuser 2 ZSatZuser 2 0
Untuk menentukan empat variable yang tidak diketahui (Δt0, Xanw, Yanw, Zanw), empat
persamaan dibutuhkan untuk masing-masing satelit. Persamaan berikut dapat
digunakan untuk keempat satelit (i = 1 – 4).
t cPSR 0 2 _ 2 _ 2 _
i XSat i Xuser YSat i Yuser ZSat i Zuser . (2.15)
6. Format data GPS [10]
Untuk memperoleh variabel seperti posisi, kecepatan, dan lainnya, modul GPS
memiliki antarmuka serial (TTL atau level RS-232). Elemen paling penting dari
informasi penerima dikirim melalui antarmuka ini dalam format data khusus. Format
ini distandarisasikan oleh National Marine Electronics Association (NMEA) untuk meyakinkan jika ada perubahan data tidak menimbulkan suatu masalah. NMEA telah
menetukan tipe data untuk bermacam-macam aplikasi, contohnya Global Navigation Satellite System (GNSS), GPS, Loran, Omega, Transit, dan juga untuk beberapa manufaktur. Tujuh tipe data berikut secara luas digunakan pada GPS modul untuk
memberikan informasi GPS:
a. GGA (GPS data fix, data fix untuk Global Positioning System) b. GGL (Posisi geografi-Latitude/Longitude)
c. GSA (GNSS DOP dan satelit aktif, penurunan akurasi dan jumlah satelit pada
Global Satellite Navigation System) d. GSV (Satelite GNSS yang terlihat)
g. ZDA (tanggal dan waktu)
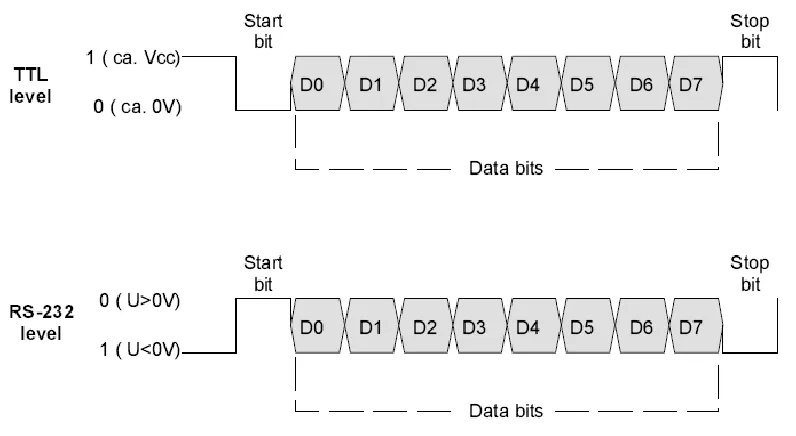
Data yang dikirimkan dengan kecepatan 4800 bit per detik menggunakan 8-bit
[image:34.612.123.521.233.451.2]printable karakter ASCII. Transmisi dimulai dengan start bit (logika nol), diikuti dengan delapan bit data dan stop bit (logika 1) yang ditambahkan pada akhir data, dan tidak menggunakan parity bit.
Gambar 2.30 Format NMEA (level TTL dan RS-232)
Setiap set data GPS dibentuk dengan cara yang sama dan memiliki struktur seperti
ini:
$GPDTS,Inf_1,Inf_2,_Inf_3,Inf_4,Inf_5,Inf_6,Inf_n*CS<CR><LF>
Fungsi dari masing-masing karakter atau set karakter dijelaskan pada tabel di bawah
ini.
Tabel 2.1. Penjelasan fungsi dari masing-masing karakter pada set data NMEA
Karakter Deskripsi
GP Informasi yang menunjukkan penggunaan GPS DTS Identitas set data
Inf_1 , Inf_n Informasi dengan nomor 1 hingga nomor ke n
, Koma digunakan untuk pemisah informasi yang berbeda * Bintang digunakan untuk pemisah checksum
CS Checksum untuk memeriksa seluruh set data <CR><LF> Akhir dari set data: carriage return dan line feed
Jumlah maksimum karakter yang digunakan tidak boleh melebihi 79. Untuk
kepentingan menentukan jumlah ini, tanda mulai $ dan tanda akhir <CR><LF> tidak
dihitung.
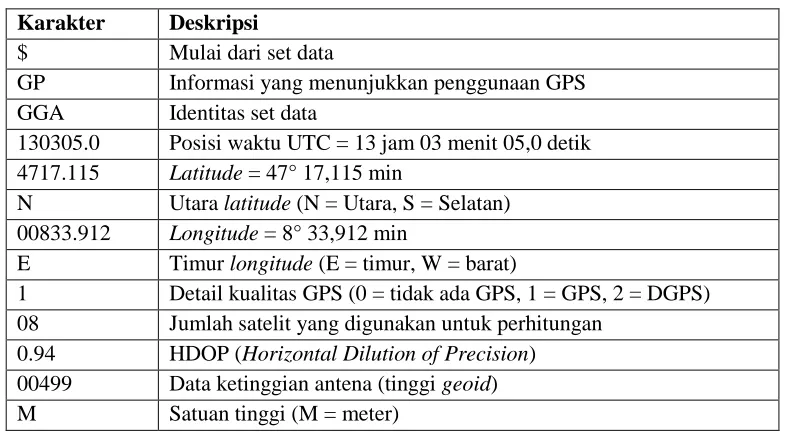
Salah satu contoh tipe set data adalah GGA. Set data GGA berisi informasi waktu,
longitude dan latitude, kualitas dari sistem, jumlah satelit yang digunakan, dan ketinggian. Contoh set data GGA adalah:
[image:35.612.124.518.488.704.2]$GPGGA,130305.0,4717.115,N,00833.912,E,1,08,0.94,00499,M,047,M,,*58<CR> <LF>
Tabel 2.2 Penjelasan dari masing-masing karakter set data GGA
Karakter Deskripsi
$ Mulai dari set data
GP Informasi yang menunjukkan penggunaan GPS GGA Identitas set data
130305.0 Posisi waktu UTC = 13 jam 03 menit 05,0 detik 4717.115 Latitude = 47° 17,115 min
N Utara latitude (N = Utara, S = Selatan) 00833.912 Longitude = 8° 33,912 min
E Timur longitude (E = timur, W = barat)
1 Detail kualitas GPS (0 = tidak ada GPS, 1 = GPS, 2 = DGPS) 08 Jumlah satelit yang digunakan untuk perhitungan
047 Perbedaan tinggi antara ellipsoid dan geoid
M Satuan perbedaan tinggi (M = meter)
,, Umur dari data DGPS (pada kasus ini tidak ada DGPS ) 0000 Indentitas dari stasiun referensi DGPS
* Bintang digunakan untuk pemisah checksum
58 Checksum untuk memeriksa seluruh set data <CR><LF> Akhir dari set data: carriage return dan line feed
H. Penerima GPS Ublox Neo-6M[18]
Penerima GPS Ublox Neo-6M merupakan penerima GPS yang berdiri sendiri (stand alone) dengan kemampuan kinerja yang tinggi dalam memberikan informasi posisi. Penerima ini fleksibel dan biaya yang rendah dengan ukuran 16 x 12,2 x 2,4 mm.
Dengan kapasitas maksimal 50 satelit dan fitur Time To First Fix (TTFF) dibawah satu detik. Ublox Neo-6M digunakan untuk mengakuisisi koordinat dengan
kemampuan menemukan satelit dengan singkat. Berikut adalah spesifikasi dari GPS
Gambar 2.31 Spesifikasi penerima GPS Ublox Neo-6M [18]
I. Accelerometer [19]
Accelerometer adalah sebuah tranduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan akibat
gravitasi bumi. Accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada kendaraan, bangunan, mesin, dan juga bisa digunakan untuk mengukur
getaran yang terjadi di dalam bumi, getaran mesin, jarak yang dinamis, dan kecepatan
1. Prinsip kerja accelerometer
Ketika berpikir tentang accelerometer maka membayangkan sesuatu yang lain seperti membayangkan bola.
Gambar 2.32 Accelerometer [19]
Jika mengambil kotak ini di tempat tanpa gravitasi bidang atau dalam hal ini dengan
tidak ada bidang lain yang mungkin mempengaruhi posisi bola, hanya akan
mengapung di tengah kotak. Dapat membayangkan kotak adalah di luar angkasa atau
jika tempat seperti itu sulit ditemukan membayangkan setidaknya pesawat ruang
angkasa yang mengorbit di sekitar planet di mana segala sesuatu dalam keadaan tanpa
bobot. Dari gambar di atas, bayangkan bahwa setiap dinding sensitif tekanan. Jika
bergerak tiba-tiba kotak ke kiri (mempercepatnya dengan percepatan 1G = 9.8m/s2
),
bola akan memukul dinding -X. Sehingga kekuatan tekanan bola berlaku untuk
[image:38.612.213.446.167.336.2]Gambar 2.33 Accelerometer dengan percepatan 1g [19]
Accelerometer akan mendeteksi kekuatan yang diarahkan ke arah yang berlawanan dari vektor percepatan. Gaya ini sering disebut Angkatan Inertial atau Angkatan fiktif
. Satu hal yang harus dipelajari adalah bahwa accelerometer mengukur percepatan tidak langsung melalui kekuatan yang diterapkan pada salah satu dinding. Gaya ini
bisa disebabkan oleh percepatan, tetapi seperti yang akan di lihat dalam contoh
berikut ini tidak selalu disebabkan oleh percepatan.
Jika meletakkannya di Bumi bola akan jatuh pada dinding Z- dan akan menerapkan
[image:39.612.149.483.97.279.2]Gambar 2.34 Accelerometer dengan percepatan 1g bumi [19]
Dalam hal ini kotak tidak bergerak tapi masih mendapatkan pembacaan 1G pada
sumbu Z. Tekanan bahwa bola telah diterapkan di dinding disebabkan oleh kekuatan
gravitasi. Secara teori bisa menjadi berbagai jenis kekuatan, misalnya, jika
membayangkan bahwa bola adalah logam, menempatkan magnet di sebelah kotak
bisa bergerak bola sehingga menyentuh dinding lain. Hal tersebut hanya untuk
membuktikan bahwa dalam tindakan accelerometer esensi memaksa tidak ada percepatan. Hanya saja terjadi percepatan yang menyebabkan kekuatan inersia yang
ditangkap oleh mekanisme deteksi kekuatan accelerometer.
[image:40.612.167.444.96.305.2]Bola akan menyentuh 2 dinding yaitu Z-dan-X seperti yang ditunjukkan pada
gambar di berikut ini:
Gambar 2.35 Accelerometer dengan percepatan 1g bumi dengan sensor dimiringkan 45⁰ [19]
2. Accelerometer Microelectro Mechanical System (MEMS)
Accelerometer merupakan salah satu produk dari Micro Electro Mechanical System
(MEMS) Technology yang banyak digunakan pada berbagai aplikasi. MEMS (Micro-electro Mechanical System) adalah sebuah sensor mekanik yang dikemas ke dalam
bentuk Integrated Circuit (IC). Karena merupakan sebuah microelectronic maka komponen utama penyusunnya adalah silicon dan dalam ukuran Micron. Dan biasa digunakan untuk mengukur percepatan, posisi, atau kejutan. Karena material yang
digunakan adalah jenis Silicon, maka MEMS dapat dibuat dalam ukuran hingga
Untuk menentukan Zero G setiap sumbu maka setiap sumbu accelerometer harus diarahkan searah gravitasi bumi yang kemudian keluaran dari sensor diukur dengan
voltmeter. Tegangan yang dihasilkan kemudian disimbolkan dengan X, Y dan Z
untuk setiap sumbu. Kemudian setiap sumbu accelerometer diarahkan berlawanan arah dengan gravitasi bumi dan diukur tegangan yang keluar. Tegangan yang
[image:42.612.171.517.276.567.2]dihasilkan kemudian disimbolkan dengan X, Y dan Z untuk masing-masing sumbu.
Gambar 26 menunjukkan struktur MEMS.
Gambar 2.36 Struktur MEMS [19]
Prinsip dasar dari sensor MEMS adalah capasitive sensor dimana dengan percepatan getaran tertentu akan mengakibatkan perubahan kapasitansi dan pada akhirnya akan
mengakibatkan perubahan tegangan output dari sensor MEMS seperti persamaan di
a =
(2.16)
dimana output tegangan sensor kapasitif dari sensor MEMS ditentukan oleh persamaan:
=
(2.17)
Dari sini dapat disimpulkan bahwa perubahan kapasitansi mengakibatkan perubahan
tegangan pada sensor output, sedang perubahan kapasitansi berbanding lurus dengan
percepatan getaran ( ) dimana 9.8( ) = 1G.
J. Gyroscope
Gyroscope adalah alat yang digunakan untuk mengukur atau mempertahankan orientasi berdasarkan prinsip momentum angular. Pada prinsipnya mechanical gyroscope adalah sebuah piringan (rotor) yang berputar pada sumbu (axis) yang mampu bergerak ke beberapa arah.
Bagian dari gyroscope terdiri dari sebuah piringan (rotor) yang berputar pada sumbu putar (spin axis). Sumbu putar ini terpasang pada suatu kerangka yang disebut gimbal
Gambar 2.37 Sistem mekanikal pada gyroscope [www.robot.gmc.ulaval.ca]
Dengan memiliki tiga gimbal maka gyroscope mempunyai kemampuan untuk berputar pada tiga sumbu putar (3 degree of rotational freedom). Walaupun
gyroscope mempunyai 3 degree of rotational freedom, namun rotor akan selalu tetap berada pada posisinya, selama gimbal berputar. Saat ketiga kerangka gimbal berputar,
rotor tidak mengikuti putarannya.
Perputaran gimbal (kerangka luar) tidak merubah posisi dari rotor. Prinsip inilah yang kemudian dimanfaatkan dalam instrumen pesawat terbang untuk mendeteksi
gerak yaw, roll dan pitch pesawat.
K. Sensor Inertia Measuring Unit (IMU) MPU6050
Sensor MPU6050 adalah sensor pertama di dunia yang terintegrasi dengan 6 sumbu
MotionTracking dengan penggabungan perangkat 3 sumbu gyroscope, 3 sumbu
komunikasi tersebut maka komunikasi ke semua register dapat dilakukan dengan baik
pada kecepatan 400KHz. Sensor IMU MPU6050 memiliki beberapa fitur, yaitu:
a. Gyroscope
Sensor MEMS 3 sumbu gyroscope MPU6050 memiliki fitur sebagai berikut: 1. Digital output X-, Y-, dan Z- sumbu sudut sensor dengan tingkat
full-programmable berkisar pada ± 250, ±500, ±1000, dan ±2000º/s 2. Terintegrasi 16-bit ADC
3. Peningkatan bias dan sensitivitas suhu dapat distabilkan saat kalibrasi
4. Memiliki kemampuan untuk meredam noise pada frekuensi rendah 5. Digital-Programmable Low Past Filter
6. Standby current = 5μA
b. Accelerometer
Sensor MEMS 3 sumbu accelerometer MPU6050 memiliki fitur sebagai berikut:
1. Digital – output 3 sumbu accelerometer dengan programmable full scale
berkisar dari ±2g, ±4g, dan ±16g
2. Terintergrasi 16-bit ADC
3. Mampu mendeketesi orentasi dan pensinyalan
4. Mampu mendeteksi sentuhan
Gambar 2.38 Sensor IMU MPU6050 [20]
L. Sensor Barometer (Digital Pressure Sensor)
Sebuah sensor tekanan berufungsi untuk mengukur tekanan , biasanya dari gas atau
cairan. Tekanan adalah ekspresi dari gaya yang dibutuhkan untuk menghentikan
cairan dari perluasan, dan biasanya dinyatakan dalam hal gaya per satuan luas.
Sebuah sensor tekanan biasanya bertindak sebagai transduser, yaitu menghasilkan sinyal sebagai fungsi dari tekanan yang dikenakan.
Sensor tekanan udara (barometer) digunakan dalam aplikasi untuk mengetahui
ketinggian dari permukaan bumi. Aplikasi ini digunakan biasanya dalam pesawat,
balon udara, roket dan satelit. Dalam dunia penerbangan sensor barometer digunakan
permukaan tanah. Untuk mengetahui ketinggian tersebut digunakanlah persamaan
dibawah ini[21]:
(2.18)
Dimana h adalah ketinggian, dimana Pref adalah nilai tekanan pada saat kalibrasi, dan P adalah nilai tekanan yang terukur. Persamaan diatas digunakan pada ketinggian maksimum 36090 kaki (11000 meter), diluar jarak itu maka perhitungan akan error
dan diganti dengan sensor yang mampu mendukung pada ketinggian tersebut dengan
perhitungan yang berbeda. Sebuah sensor barometer dapat memilik akurasi 1 meter,
[image:47.612.258.377.437.546.2]jauh lebih baik dibandingkan dengan menggunakan altitude pada GPS yang akurasinya mencapai 20 meter.
Gambar 2.39 Sensor barometer BMP085 [21]
M. Sensor Magnetometer
berbagai bidang seperti kapal selam, pesawat terbang, bahkan dalam bidang
arkeologi. Teknologi sensor magnetometer yang pertama kali diciptakan oleh PNI, Inc. untuk kepentingan militer Amerika Serikat. Kemampuan sensor sangat
[image:48.612.238.407.221.393.2]tergantung dengan pengenalan lokasi. Sensor magnetometer mengacu pada magnetik bumi, pergeseran arah dari magnet bumi.
Gambar 2.40 Sensor magnetometer HMC5883L [22]
N. Mikrontroler ATmega 328P[23]
ATmega 328P adalah mikrokontroler CMOS 8-bit berarsitektur AVR RISC yang
memiliki 32K Bytes memori Flash. Mikrokontroler dengan konsumsi daya rendah ini mampu mengeksekusi instruksi dengan kecepatan maksimum 20 MIPS pada
frekuensi 20MHz. Berikut adalah fitur selengkapnya dari AVR ATmega 328P.
High-Performance, Low-Power AVR 8-bit RISC Microcontroller Advanced RISC Architecture
a. 131 Instruksi penuh b. 32 x 8 Register memori
Segmen High-Endurance Non-Volatile Memory
a. 32K Bytes In-System Self-programmable Flash Program Memory
b. 1K BytesIn-System Programmable EEPROM c. 2K Bytes Internal SRAM
d. Write/Erase Cycles: 10,000 Flash / 100,000 EEPROM e. Programming Lock untuk Software Security
Fitur Antarmuka
a. Dua buah 8-bit Timer/Counter dengan Prescaler, dan Compare Mode
b. Satu 16-bit Timer/Counter dengan Prescaler, Compare Mode, dan Capture Mode
c. Enam buah kanal PWM d. Delapan kanal 10-bit ADC e. On-chip Analog Comparator f. USI – Universal Serial Interface g. Programmable Serial USART
h. Programmable Watchdog Timer dengan On-Chip Oscillator terpisah
Fitur Khusus
a. Power-On Reset and Programmable Brown-out Detection b. Internal Terkalibrasi RC Oscillator
c. External and Internal Sumber Interrupt
d. Low-power Idle, Power-down, dan mode Standby
I/O dan Paket
a. 23 Jalur I/O terprogram
b. 28-pin PDIP, 32-lead TQFP, 28-pad QFN/MLF
Tegangan Operasi
a. 1.8 – 5.5V
Tingkat Kecepatan
b. 0 -10MHz @ 2.7 – 5.5V c. 0– 20MHz @ 4.5 – 5.5V
Konsumsi Daya pada 1MHz, 1.8V, 25`C
a. Active: @ 1MHz, 1.8V = 230 uA; @ 32KHz, 1.8V = 20 uA ( Termasuk Oscilator)
[image:50.612.186.455.223.508.2]b. Mode Daya Turun: < 0.1 uA @ 1.8V
Gambar 2.41 Pin mikrontroler ATmega 328P [23]
O. Inter Integrated Circuit (I2C)[24]
Inter Integrated Circuit (I2C) adalah standar jalur komunikasi pada IC yang dikembangkan oleh Philips Inc. Dasar dari I2C adalah sebagai berikut:
a. Master
a. Mengontrol serial clock line (SCL).
b. Mengatur kondisi START dan STOP pada saat pengiriman data.
c. Mengontrol pengalamatan dari perangkat lain.
b. Slave
Perangkat yang dialamatkan oleh master
2. Memiliki kecepatan 100 kbps (standard mode), 400 kbps (fast mode), dan 3.4 Mbps (high-speed mode).
3. Pengalamatan 7 bit atau 10 bit unik.
4. Master dapat dioperasikan sebagai transmitter ataupun receiver.
I2C memiliki dua tipe jalur komunikasi dalam pengiriman data, yaitu:
a. Master sebagai pengirim data dan slave sebagai penerima data b. Master sebagai penerima data dan slave sebagai pengirim data
[image:51.612.119.509.536.681.2]Untuk lebih jelasnya dalam tipe jalur komunikasi pada I2C, diilustrasikan pada
gambar berikut:
I2C memiliki dua jalur komunikasi, yakni serial data line (SDA) dan serial clock line
(SCL). Pentransferan data dilakukan setelah kondisi START terpenuhi, berikut
[image:52.612.237.389.177.288.2]adalah keadaan START:
Gambar 2.43 Kondisi START pada I2C[24]
Dari gambar diatas kondisi START terjadi dengan syarat SDA dari kondisi 1 menjadi
0, dan SCL tetap dalam kondisi 1. Pentransferan data dilakukan dalam byte dimana 1
byte adalah 8 bits dan sebuah ACK. Pentransferan data dilakukan dengan kondisi SCL menjadi 0, dan mengeluarkan sinyal pulsa tiap bit. Delapan bit pulsa data selalu
diikuti ACK, setelah ACK maka master akan pentransferan data byte selanjutnya. Prosese ini dapat dilihat pada gambar berikut:
[image:52.612.123.510.512.646.2]P. Proportional Integrative Derivative (PID)[26]
Proportional Integrative Derivative (PID) merupakan sistem pengendalian untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan
balik pada sistem tersebut.
Komponen kontrol PID ini terdiri dari tiga jenis yaitu Proportional,
Integratif dan Derivatif. Ketiganya dapat dipakai bersamaan maupun sendiri-sendiri
tergantung dari respon yang kita inginkan terhadap suatu plant. 1. Kontrol Proporsional
Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e maka u = Kp •
e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja
tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontrol P
memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun
demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu
untuk memperbaiki respon transien khususnya rise time dan settling time.
2. Kontrol Integratif
Jika G(s) adalah kontrol I maka u dapat dinyatakan sebagai
u(t) = (2.19)
Dengan Ki adalah konstanta Integral, dan dari persamaan di atas, G(s) dapat
dinyatakan sebagai
Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar
sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek
kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan
respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon
transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan
Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah
orde sistem
3. Kontrol Derivatif
Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai:
G(s) = s.Kd (2.21) Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini dalam konteks
"kecepatan" atau rate dari error. Dengan sifat ini ia dapat digunakan untuk
memperbaiki respon transien dengan memprediksi error yang akan terjadi. Kontrol Derivative hanya berubah saat ada perubahan error sehingga saat error statis kontrol
ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler Derivative tidak
dapat dipakai sendiri.
Sistem kendali holding position adalah sistem kendali untuk mempertahankan posisi koordinat quadcopter secara autonomous dengan memanfaatkan data valid GPS dan
[image:55.612.239.461.168.289.2]accelerometer.
Gambar 2.45 Sistem holding position pada quadcopter
Dari gambar diatas x merupakan koordinat longitude, y adalah koordinat latitude, dan
ϒ adalah sudut sempit longitude dari latitude terhadap kutub bumi. Untuk
menghitung ϒ maka persamaan yang digunakan adalah sebagai berikut[27]:
(2.22)
GPSlatitude merupakan data yang didapat dari NMEA, kemudian dikonversikan
kedalam bentuk satuan sudut (rad). Sehingga didapatkanlah persamaan berikut untuk
mengukur error pada holding positon[27]:
(2.23)
Error pada kedua parameter tersebut digunakan sebagai inputan pengendali PID. Pengendali PID digunakan sebagai kontrol (navigasi) quadcopter untuk mencapai koordinat holding position. Untuk mengetahui simpangan terjauh dalam bentuk jarak antara dua titik latitude dan longitude, maka digunakan persamaan teorema Pythagoras sebagai berikut[28]:
(2.25)
(2.26)
(2.27)
(2.28)
Dimana latitude dan longitude harus dikonversikan dalam bentuk radians dengan persamaan berikut[28]
:
(2.29)
= selisih latitude (rad) Δ = selisih longitude (rad)
D = jarak (Km)
R = jari-jari bumi (6.371km)
R. Microsoft Visual Studio 2010[29]
Software Ground Station yang dibuat menggunakan Microsoft visual Studio dengan bahasa pemrograman Microsoft C# .net merupakan sebuah bahasa pemrograman yang memiliki fungsi untuk membuat atau mengembangkan aplikasi, baik itu aplikasi
Ada beberapa kompiler yang sudah tersedia di Microsoft Visual Studio 2010. seperti
Visual Studio antara lain Visual C++, Visual C#, Visual Basic, Visual Basic .NET,
Visual InterDev, Visual J++, Visual J#, Visual FoxPro, dan Visual SourceSafe.
Microsoft Visual Studio ini membutuhkan .Net Framework untuk menjalankan
[image:57.612.121.523.276.500.2]Aplikasinya . Untuk microsoft Visual Studio 2010. .net Framework yang dibutuhkan ialah .NET Versi 4.0.
Gambar 2.46 Tampilan Microsoft Visual Studio 2010
NET Framework. Adalah lingkungan multi-bahasa untuk membangun, menyebarkan,
dan menjalankan layanan Web XML dan aplikasi. Ini terdiri dari tiga bagian utama:
1. Common Language Runtime runtime ini sebenarnya memiliki peran dalam kedua runtime komponen dan pengalaman waktu pengembangan. Sementara
komponen ini berjalan, runtime bertanggung jawab untuk mengelola alokasi
kebijakan keamanan, serta memenuhi dependensi komponen tersebut terhadap
komponen lainnya. Pada saat pembangunan, peran runtime yang berubah
sedikit, karena secara otomatis begitu banyak (misalnya, manajemen memori),
runtime membuat pengalaman pengembang sangat sederhana, terutama bila
dibandingkan dengan COM seperti saat ini. Secara khusus, fitur seperti
refleksi secara dramatis mengurangi jumlah kode pengembang harus menulis
untuk mengolah logika bisnis menjadi komponen dapat digunakan kembali.
2. Unified programming classes Kerangka kerja ini menyediakan pengembang dengan satu set, terpadu berorientasi obyek, hirarki, dan extensible
perpustakaan kelas (API). Saat ini, C + + pengembang menggunakan
Microsoft Foundation Classes dan Jawa pengembang menggunakan Windows
Foundation Classes. Kerangka kerja ini menyatukan model-model yang
berbeda dan memberi Visual Basic dan JScript akses programmer untuk
perpustakaan kelas juga. Dengan membuat seperangkat API di semua bahasa
pemrograman, bahasa umum runtime memungkinkan lintas bahasa warisan,
penanganan error, dan debugging. Semua bahasa pemrograman, dari JScript
ke C + +, memiliki akses yang mirip dengan kerangka kerja dan pengembang
bebas memilih bahasa yang ingin mereka gunakan.
3. ASP.NET ASP.NET dibangun di atas kelas pemrograman NET Framework., Menyediakan model aplikasi Web dengan satu set kontrol dan infrastruktur
mencakup seperangkat kontrol yang merangkum elemen umum user interface
HTML, seperti kotak teks dan menu drop-down. Kontrol ini dijalankan di
server Web, bagaimanapun, dan mendorong user interface mereka sebagai
HTML ke browser. Pada server, kontrol mengekspos model pemrograman
berorientasi objek yang membawa kekayaan berorientasi objek pemrograman
untuk pengembang Web. ASP.NET juga menyediakan jasa infrastruktur,
seperti manajemen sesi negara dan daur ulang proses, yang mengurangi
jumlah kode pengembang harus menulis dan meningkatkan keandalan
aplikasi. Selain itu, ASP.NET menggunakan konsep-konsep yang sama untuk
memungkinkan pengembang untuk menyediakan perangkat lunak sebagai
layanan. Menggunakan layanan Web XML fitur, pengembang ASP.NET
dapat menulis logika bisnis mereka dan menggunakan infrastruktur ASP.NET
untuk memberikan layanan yang melalui SOAP
S. Modul 9XTend™ OEM RF[30]
9XTend™ OEM RF Module ialah sebuah modul elektronik yang digunakan sebagai
pengirim data digital yang menggunakan komunikasi serial dengan spesifikasi
sebagai berikut :
1. Bit rate yang dapat diatur dari 1200 - 230400 bps,
2. Jarak jangkauan 22km
3. Frekuensi 902-928 Mhz
Gambar 2.47 Xtend OEM dalam bentuk USB [30]
Gambar 2.48 Xtend dalam bentuk modul [30]
Modul Xtend ini memiliki 3 jenis pengiriman yaitu :
Tabel 2.3 Tabel jenis pengiriman
Point To Point Definisi
Data RF dikirimkan melaui dua modul secara bergantian
Point To Multi- Point
[image:60.612.113.484.512.704.2]Peer To Peer
Setiap modul mengirimkan ke berbagai modul yang lain dengan syarat modul memiliki saluran kanal yang sama.
(9XTend™ OEM RF Module Product Manual , 2012)
[image:61.612.114.484.85.187.2]Sedangkan keterangan untuk masing-masing pin dapat dilihat pada tabel berikut ini:
Tabel 2.4 Deskripsi Pin out MaxStream 9XTend
Modul ini menggunakan teknik Frequency Hopping spread spectrum (FHSS).
Transmiter dan Receiver melakukan singkronisasi pada hop yang sama. FHSS dapat digunakan untuk meningkatkan keamanan dan juga mengatasi masalah kemacetan
sinyal serta pemudaran sinyal. Contoh dari FHSS ini ialah Wireless Local Area Network ( WLAN) dan komunikasi GSM pada mobile phone.
[image:61.612.223.434.540.681.2]Transmisi GSM menggunakan kombinasi Frequency Division Multiple Accses (FDMA) dan Time Division Multiple Accses. Panggilan pada HP tidak terikat pada satu kanal saja pada saat durasi waktu panggilan. GSM menggunakan Frequncy Hopping yang lambat untuk mengganti saluran panggilan pada interval yang teratur.
Gambar 2.50 Fast Hopping Channel dan Slow Hopping Channel. [30]
[image:62.612.214.467.220.398.2]
![Gambar 2.11 Gaya aerodimanis dan moments pada sebuah rotor[6]](https://thumb-us.123doks.com/thumbv2/123dok_us/8806763.916677/15.612.218.414.532.648/gambar-gaya-aerodimanis-moments-rotor.webp)

![Gambar 2.22 Tiga bagian dari GPS[13]](https://thumb-us.123doks.com/thumbv2/123dok_us/8806763.916677/22.612.169.472.83.307/gambar-tiga-bagian-dari-gps.webp)
![Gambar 2. 23 Satelit NAVSTAR[13]](https://thumb-us.123doks.com/thumbv2/123dok_us/8806763.916677/23.612.223.420.249.456/gambar-satelit-navstar.webp)
![Gambar 2.27 Empat satelit dibutuhkan untuk menentukan posisi dalam tiga dimensi[15]](https://thumb-us.123doks.com/thumbv2/123dok_us/8806763.916677/30.612.231.409.233.418/gambar-empat-satelit-dibutuhkan-untuk-menentukan-posisi-dimensi.webp)
![Gambar 2.31 Spesifikasi penerima GPS Ublox Neo-6M [18]](https://thumb-us.123doks.com/thumbv2/123dok_us/8806763.916677/37.612.114.513.84.369/gambar-spesifikasi-penerima-gps-ublox-neo-m.webp)
![Gambar 2.32 Accelerometer [19]](https://thumb-us.123doks.com/thumbv2/123dok_us/8806763.916677/38.612.213.446.167.336/gambar-accelerometer.webp)
