2019 International Conference on Information Technology, Electrical and Electronic Engineering (ITEEE 2019) ISBN: 978-1-60595-606-0
Output Feedback
H
Control Method of Quadrotor UAV
Based on Parameter Uncertainty
Xiao-lu REN
1,*and Jin-hua GUO
2 1College of Engineering, Harbin University, Harbin, China
2Research and Development Center, China Academy of Launch Vehicle Technology, Beijing, China *Corresponding author
Keywords: Quadrotor, Output feedback, Uncertainty, LMI.
Abstract. Quadrotor UAV is a kind of aircraft which is widely used in both military and civil fields. The research on its control method is a hot topic in current research. This paper presents an output feedback H control method based on parameter uncertainty. The feasible solutions of the controllers satisfying the performance requirements are obtained in the form of linear matrix inequalities (LMIs). This method can also suppress the interference of external environment when the parameters change, and the system also has good performance.
Introduction
The mechanical structure of quadrotor UAV is relatively simple. It can take off and land vertically, hover stably, fly forward quickly, and maneuver at large angles. Therefore, quadrotor UAV is widely used in military and civil fields. Firstly, in military field, quadrotor UAV can achieve the functions of military reconnaissance, supply and sample collection. In the civil field, quadrotor UAV can realize the functions of photography, environmental monitoring, delivery and acceptance of express delivery, sampling of agricultural, forestry and animal husbandry insurance subject matter and so on. With the deepening of the research on quadrotor UAV, it will undertake more and more tasks.
The research on control methods of quadrotor UAV mainly focuses on two aspects. The first aspect is linear control [1,2], including PID control, linear quadratic optimal control, control and others. These methods are to linearize the non-linear system model and control it. It can adapt to complex non-linear conditions by improving the robustness of the system. The second aspect is non-linear control [3,4,5], including back-stepping, sliding mode control, adaptive control and others. These methods are to control the nonlinear system directly, but depending on the accuracy of the system parameters and these methods are usually complex. In this paper, an output feedback H control method based on parameter uncertainty is proposed to solve the stability problem of an quadrotor UAV, when its parameters change and it is disturbed by uncertainties such as crosswind.
Modeling
Figure 1. Quadrotor UAV.
The dynamics and kinematics models of quadrotor UAV can be expressed as follows:
2 2 2 2
1 1 2 3 4 1 2 3 4
2 2
2 4 2 4 2
2 2
3 3 1 3 1
2 2 2 2
4 4 2 1 3 4 2 1 3
t
t
t
g
U F F F F k
U F F k
U F F k
U F F F F k
(1)
1 1 1 1cos sin cos sin sin
sin sin cos sin cos
cos cos x U m U y m U z g m (2)
2 3 4 1 1 1 y z x z x y x y zLU I I
I
LU I I
I
U I I
I (3)
where L is the distance between the aircraft axis and the rotor axis, , , are the roll angle, pitch angle and yaw angle of the aircraft respectively. F F F F1, 2, 3, 4 represent the lift provided by the four
rotor, 1, 2, 3, 4 represents the angular velocity of the four rotor, kt and kg represent the lift coefficient and drag coefficient respectively. U U U U1, 2, 3, 4 are the four control variables of the aircraft,
, ,
x y z
I I I represent the three-axis rotational inertia respectively.
According to reference [6], the small perturbation linearization of aircraft is carried out, and the state variable is selected as z z T , The control variable is selected as
1 2 3 4
T
Control Design
In practical engineering, the state is not easy to be completely measurable. At the same time, the introduction of too many sensitive elements increases the probability of failure and brings more unstable factors to the system. Therefore, the observable output variables are used as the feedback variables of the system. The output feedback controller [7] is also designed, and the closed-loop system meets the control index requirements. Since output feedback is incomplete in principle, a dynamic output feedback Hsystem is constructed by introducing a dynamic compensator.
The linear model of a quadrotor UAV is expressed as
1 2
1
2
( ) ( ) ( ) ( ) ( ) ( ) ( )
( )
t t t
t t
t
x A A x B w B B u
z C x Du
y C x
(4)
where is x( )t Rn the state vector of generalized object, u( )t Rm is the control variable, w( )t Rp is the interference input, z( )t Rq is the output, y( )t Rf is the measurement output, A, B1, B2, C1,
2
C and D are the matrix of corresponding dimensions, A, B are used to represent the real parameter uncertainties that may exist in the system state matrix and input matrix.
1 2
(A B) HF E( E ), H、 、E1 E2 are the matrix of corresponding dimensions, and F is an
unknown matrix, which meets F FT I.
Given scalar 0, the feedback controller (5) is called dynamic output feedback H controller, if the the closed-loop transfer function Tzw( )s from w( )t to z( )t is minimized, meanwhile, for the given
0
, Tzw( )s satisfies Tzw( )s ∞ . At this time, the uncertainty of the system satisfies
1 2
(A B) HF E( E ) and T
F F≤I, and the closed-loop system is internally stable.
c c c c
c c c
x A x B y
u C x D y
(5) The augmented closed-loop system is
cl cl cl cl
cl cl
x A x B w z C x
(6)
where
2 c 2 2 c
cl
c 2 c
( ) ( )
A A B B D C B B C A
B C A
(7)
1 cl
0
B B
(8)
cl[ 1 c 2 c]
Given scalar 0, 0, if real symmetric matrix R and S with corresponding dimensions and matrix Ac、 、 、Bc Cc Dc exist, and make inequality 10 hold, the closed-loop system is internally stable and Tzw( )s
∞
T
11 12 1 14 1 16
T T T
12 22 1 24 1 26
T T
1 1
T T
14 24
1 1
T T
16 26
T T
T T
0 0 0 0 0
0 0 0 0 0
0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
B RE H H
SB E SH SH
B B S I
I
E R E I
I
H H S I
H H S I
(10)
where T T T
11ARRA B C2 cC Bc 2
, T
12 A Ac B D C2 c 2
, T T T
22SAA SB Cc 2C B2 c
,
T T T
14RC1 C Dc
, T T T T
24C1 C D D2 c
, T T
16C Ec 2
, T T T
26C D E2 c 2
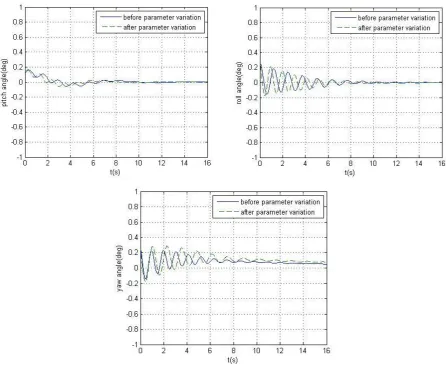
[image:4.595.68.515.339.711.2] .Through the above design of output feedback control law, the simulation is carried out when the parameters of the aircraft are changed, as shown in figure 2.
Figure 2. Attitude responses when parameters change.
Summary
This paper presents a design method of output feedback controller for uncertainties. This control method can suppress the uncertainties and external disturbances of the system, and make the aircraft still have good performance in the presence of modeling uncertainties and external disturbances. Conditions for the existence of controllers satisfying performance requirements are obtained in the form of linear matrix inequalities, and feasible solutions for the existence of controllers are obtained through LMI toolbox. This control method is applied to the attitude control system of quadrotor UAV. The simulation results show that the control method has good robustness to model uncertainty and controller uncertainty, and can effectively suppress interference to the control system.
Acknowledgement
This research was financially supported by Youth Doctoral Research Foundation of Harbin University (HUDF2016202).
References
[1] Alejandro J Malo Tamayo, Cesar A. Villaseñor Ríos, etc. Quadrotor Input-Output Linearization and Cascade Control[J]. IFAC-PapersOnLine, 2018, 51(13): 437-442.
[2] M. A. Lotufo, L. Colangelo, C. Perez-Montenegro, C. Novara, E. Canuto. Embedded Model Control for UAV Quadrotor via Feedback Linearization[J]. IFAC-PapersOnLine. 2016, 49(17): 266-271.
[3] Hai-Nguyen Nguyen, ChangSu Ha, Dongjun Lee. Mechanics, control and internal dynamics of quadrotor tool operation[J]. Automatica. 2015(11): 289-301.
[4] Yao Zou, Bing Zhu. Adaptive trajectory tracking controller for quadrotor systems subject to parametric uncertainties[J]. Journal of the Franklin Institute. 2017(10): 6724-6746.
[5] M. Elena Antonio-Toledo, Edgar N. Sanchez, etc. Real-Time Integral Back-stepping with Sliding Mode Control for a Quadrotor UAV[J]. IFAC-Papers OnLine. 2018, 51(13): 549-554.
[6] Xiao-lu Ren. Research on Ducted Fan Unmanned Vehicle Modeling and Control Strategies[D]. Harbin: Harbin Institute of Technology, 2014:31-35.