2017 2nd International Conference on Information Technology and Management Engineering (ITME 2017) ISBN: 978-1-60595-415-8
Design of the Position Controller for the Leaves of MLC Based on
Cross-Coupled Control
Xin ZHANG
1,*, Jia-xin LI
1and Min LIU
2 1School of Automation & Electrical Engineering, Lanzhou Jiaotong University, Lanzhou 730070, China
2
Mechatronic Engineering Department, Lanzhou Vocational Technical College, Lanzhou, China, 730070
*Corresponding author
Keywords: Multi-leaf collimator, Radiation therapy, Fractional order Anti-windup, Cross-coupled Control.
Abstract. According to requirements of the leaves position precision control of multi-leaf collimator (MLC) in the process of radiotherapy, the structure and working principle of the multi-leaf collimator of conformal radiation therapy apparatus was described. Firstly, the position controller of single leaf has been established, and then t fractional order Anti-windup controller was used to ensure the position accuracy of the MLC leaves and meet the requirements of conformal therapy. Finally, the position-loop cross-coupled controller is proposed to reduce the position error. The experimental results show that this method can meet the needs of the control precision of the leaves’ position of the multi-leaf collimator.
Introduction
With the deeply research on radiotherapy, the development of equipment for radiotherapy has made great progress. Then it is very important to precisely locate on the tumor and adjust the radiation dose. The purpose of the Multi-leaf Collimator( MLC) is to realize the conformal radiotherapy[1,2] So, the research of the position [3]of the leaves of the MLC has much more practical significance[4].
In the motor speed control system, there is a phenomenon of windup. Scholars proposed some anti-windup control technology[5], which is divided into two categories: the conditional integral method and the trace back calculation method, in order to overcome the phenomenon of windup.
The main idea of cross-coupled control is to build a real time contouring error control model and feedback correction signal to the individual axes velocity loop. The control parameters of cross-coupled control are easy to adjust and the dynamic equations of the system are not essential. However, traditional CCC scheme is based on velocity loop, it is not suitable for the system which has already set up for position loop. To solve this problem [6].
Control System Model of the Multi-Leaf Collimator for Single Leaf
[image:1.612.192.430.658.730.2]The multi-leaf collimator is mainly composed by a plurality of leaves, which are arranged in pairs. In radiation therapy system, the position of MLC leaves will be determined based on the shape of the tumor, and the shape of the rays that pass through the MLC is similar to the projection on the irradiated surface of the tumor. The working principle diagram of MLC is shown in Figure 1.
In practical applications, each leaf of MLC is driven by an micro electric motor, and the rotational movement of the motor is converted to a linear motion of the leaf by screw rod. Each leaf has a set of independent controller. The electric motor that has been used in this system includes stepping motor, DC servo motor, and brushless DC motor. The brushless DC motor (BLDC motor) is widely used in MLC control system with many unique advantages[7]. The structure diagram of the close-loop position control system is shown in Figure 2.
Figure 2. Structure diagram of the close-loop position control system.
Design of FOAnti-Windup Controller for Single Leaf
The paper has made much research only on the control of the motor. The BLDC motor can be controlled precisely by the drive file of MLC outputted from the radiation treatment planning system.
The transfer function of speed model is obtained as Eq.1.
2
t b ( )
( )
( ) ( )
t K Y s
G s
R s LJs LD RJ s K K
= =
+ + + (1) where vapp is the applied voltage,
ω
( )t is the motor speed, Lis the inductance of the stator, i t( ) is the current of the circuit, Ris the resistance of the stator, vemf is the back electromotive force,T is the torque of motor, Dis the viscous coefficient, J is the moment of inertia, Kt is the motor torque constant, and Kb is the back electromotive force constant.
The parameters of the motor used for simulation are as follows: Kb is the motor torque
constant: 3.08 10× −3N m A⋅ / ;Kb is the back electromotive force constant: 0.0294;L is the
inductance of the stator: 0.035mH;J is the moment of inertia: 0.75gcm2;Ris the resistance of the stator: 1.26Ω;Dis the viscous coefficient: 7.14 10× −5.
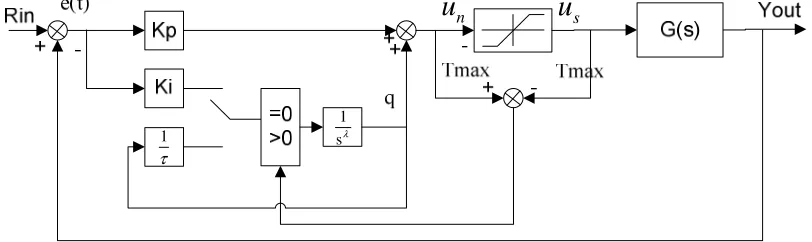
In this paper, combined with anti-windup and fractional order PID as the controller of the controlled object, the state transition condition of the controller is realized by the judgment of the integral state q. It can be represented as Eq.2, the Structure diagram of FOAnti-windup control system is shown in Figure 3.
1 τ
1 sλ
n
u
u
s [image:2.612.106.512.589.710.2]( ) 1
i n s
n s
K e t u u
q
q u u
τ
=
′ =
− >
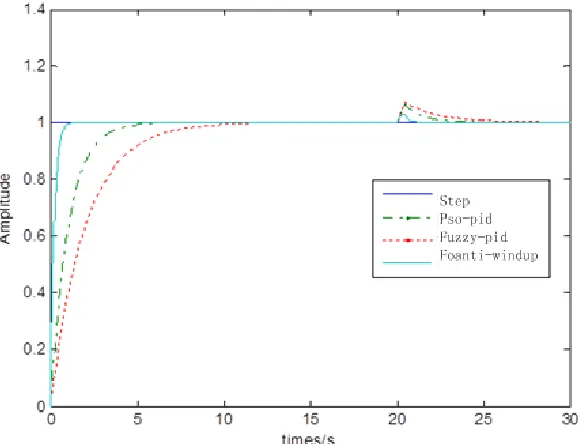
[image:3.612.160.450.188.410.2] (2) The design takes the step signal as input signal to achieve the step response of the control system. Another two examples of the fuzzy adaptive PID and PSO-PID controller is given to illustrate the proposed design is effective. The results of the three methods are shown in Figure 4. The results of the simulation show that the performance index of the proposed method is better than that by using the fuzzy adaptive PID algorithm and the PSO-PID.
Figure 4. Step response curve of output with the three control strategies.
Design the Position Controller for MLCbased on CCC
As shown in Figure 5, cross-coupled control[8] contains two main parts: one is the real-time positon error estimation algorithm, the another one is cross-coupled control law. CCC consider about the position error of the adjacent axis. Then the synchronization error can be defined as Eq.3.
[image:3.612.126.493.514.711.2]1 1 1 2 2
2 2 2 3 3
1 1
1 1 1
1 1
i i i i i
n n n n n
n n n
C e C e
C e C e
C e C e
C e C e
C e C e
ε ε ε ε ε + + − − − = − = − = − = − = − (3) i
ε
is the synchronization for the iaxis, Ciis the synchronization coefficient.Simulation and Results
The leaf position error variation curves are shown in Fig.6, the results can meet the system requirements, rapid convergence. With the control strategy, the change of the position error is smaller, and the time required to eliminate the position error is shorter.
Conclusion
For multi-motor control system, the cross-coupled control strategy can reduce the position error of each leaves of MLC. The control effect of the system with CCC control strategy is better than the system that without the CCC control strategy.
[image:4.612.119.497.369.528.2](a) with the control strategy (b) without the control strategy Figure 6. The leaves’ position error variation curves.
Acknowledgements
The Lanzhou Jiaotong University Youth Foundation (No. 2013041)
References
[1]J.W. Dang, Y.P. Wang, S. Li, and Z.P. Zhu. Heavy-ion Radiotherapy Treatment Planning System and Medical Image Processing Algorithm Used in It. 4th IEEE Conference on Automation Science and Engineering. Key Bridge Marriott, Washington DC. (2008)726-731.
[2]Y.P. Wang: Research on Key Technology of Image Processing for Heavy-ion 3D Conformal
Radiotherapy. Ph.D., Lanzhou: Lanzhou Jiaotong University,China 2010.
[3]I. Podlubny, I. Petras, B.M. Vinagre, Y.Q. Chen, P. O’Leary, L. Dorcak.Realization of fractional order controllers . Acta Montanistica Slovaca (S1335-1788), 8(2003) 233-240.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 -0.1 -0.08 -0.06 -0.04 -0.02 0 0.02 0.04 0.06 0.08 0.1 time/s p o s it io n e rr o r
with control strategy
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 time/s p o s it io n e rr o r
[4]Z.J. Ju, Y.L. Wang, L. Ma, S.P. Xu, X.K. Dai, L.Y. Wang. Verification of accuracy of multileaf collimator leaf position using a two- dimensional ion chamber array. Chinese Journal of Radiation Oncology. 15(2006) 335-342.
[5]Y.J. Yu, F. Chai, H.W. Gao, S,K. Cheng. Design of PMSM System Based on Anti-Windup Controller. Transactions of China Electrotechnical Society. 24(2009) 66-71.
[6]J. Yang and Z. Li. A novel contouring error estimation for position loop-based cross-coupled control. IEEE/ASME Transactions on Mechatronics. 16(2011)643–655.
[7]G.X. Zhu: Research on Several Key Techniques of Clinic of Multi-leaf Collimator Radiation Therapy System.Ph.D., Shenyang University of Technology, China 2008.