ABSTRACT
DENNIS, BRENT MOORMAN. Integrating Preference Elicitation into Visualizations. (Un-der the direction of Dr. Christopher G. Healey.)
Modern technology has enabled researchers to collect large amounts of information in an
expanding scope of research fields. At the same time, these new datasets are becoming more
complex as evidenced in their increasing size and dimensionality. Managing and understanding
these datasets has become a challenging problem. Visualizations attempt to address these
con-cerns by creating meaningful graphical representations of data that can rapidly and accurately
convey important information and interesting properties about the data to a researcher.
How-ever, many existing visualization algorithms are overwhelmed by the size of today’s datasets.
As a result, information is often forced off-screen due to a lack of visual resources. In previous
work, we developed a navigation assistant to aid users with finding interesting data elements
located off-screen. The assistant used a graph framework to provide way-finding cues and
gen-erate informative animated tours of the visualization. In order to identify which elements to
include in this framework, the navigation assistant needs to model users’ interests; i.e., their
preferences.
The efficient collection and modeling of a user’s preference information is a fundamental
goal of preference elicitation. Many of these techniques have yet to be applied to real-world
practical problems. We address the challenges of integrating a preference model and
corre-sponding elicitation techniques into an environment not especially suited for collecting
pref-erence information, specifically, a visualization environment. Using combinations of explicit
and implicit techniques, the navigation assistant collects preference information from users
both before and during their interaction with a visualization. These techniques provide input to
an underlying preference model used by the navigation assistant to dynamically add or remove
elements from the graph framework. Using the preference model, the assistant attempts to
INTEGRATING PREFERENCE ELICITATION INTO VISUALIZATIONS
by
BRENT M. DENNIS
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
COMPUTER SCIENCE
Raleigh, North Carolina
2006
BIOGRAPHY
Brent Moorman Dennis was born July 4, 1976 in Atlanta, Georgia. In 1998, he received
his Bachelor of Science degree in Mathematics with a concentration in Computer Science
from Davidson College, Davidson, North Carolina. After spending a year at the University
of North Carolina at Charlotte furthering his education in computer science, he entered the
Computer Science graduate program at North Carolina State University. In October of 2002,
he successfully completed his oral preliminary exam for a Master of Science degree, graduating
in December 2003. Mr. Dennis then entered the Computer Science doctoral program at North
Carolina State University. In December of 2006, he completed the final oral exam for his Ph.D.,
ACKNOWLEDGEMENTS
I would like to especially thank my advisor, Dr. Christopher G. Healey, for his unwavering
support during my graduate studies. His insightful criticism and helpful advice were
invalu-able to the completion of this dissertation. I would also like to thank the other members of
my committee, Dr. Jon Doyle, Dr. Carla Savage, and Dr. R. Michael Young, who made their
expertise available to me and assisted with the development of my research.
Also, thanks go to my peers in the Knowledge Discovery Lab, both past and present. My
fellow doctoral students Sarat Kocherlakota, Amit Sawant, and Laura Tateosian deserve a
spe-cial thanks. We were always willing to share ideas, time, and resources with one another and
I believe that team-mentality was a very positive component of my graduate experience. Also,
particular thanks go to Lloyd Williams and Thomas Horton who have always been supportive!
Lastly, I wish to thank my family: Anna, Lauren, Drew, Jane, and Ron Dennis. They have
never doubted my abilities and have been a constant source of support and encouragement.
Contents
List of Figures vii
List of Tables ix
1 Introduction 1
1.1 Visualization and Navigation . . . 1
1.2 Preference Elicitation . . . 5
1.3 Data Exploration . . . 6
1.4 Research Goals . . . 7
2 Visualization 9 2.1 General Overview . . . 9
2.2 Large N . . . 12
2.3 Large M . . . 13
3 Preferences 17 3.1 Decision Theory . . . 17
3.2 Challenges of Elicitation . . . 20
3.3 Types of Queries . . . 21
3.4 Preference Structure . . . 23
3.5 Preference Representation . . . 27
3.5.1 Vector Models . . . 28
3.5.2 Graph-based Models . . . 29
3.6 Selecting the Next Query . . . 31
3.6.1 Metric Techniques . . . 31
3.6.2 Providing Examples . . . 33
3.7 Preference Elicitation: Explicit versus Implicit . . . 35
3.7.1 Explicit Elicitation . . . 35
3.7.2 Implicit Collection . . . 37
4 Data Exploration System 39 4.1 Visualization System . . . 42
4.3 Preference System . . . 47
4.3.1 Discretizing the Dataset . . . 47
4.3.2 Preference Model and Elicitation . . . 50
5 User Model 53 5.1 Bayesian Networks . . . 55
5.2 Bayesian Classifiers . . . 57
5.3 Learning Bayesian Structure . . . 60
5.4 Boosting . . . 62
5.5 Navigation Assistant’s Bayesian User Model . . . 64
5.6 Application of Bayesian Classifier . . . 69
5.7 Interest Rules . . . 70
6 User Input 75 6.1 Updating the Preference Model . . . 76
6.2 Implicit Input . . . 81
6.2.1 Fine Focus Events . . . 81
6.2.2 Broad Focus Events . . . 83
6.3 Explicit User Input . . . 88
6.3.1 Model Critiquing in the Navigation Assistant . . . 88
6.3.2 Initial Preference Statements . . . 92
7 Application and Examples 98 7.1 Environment . . . 98
7.2 Example A Description . . . 100
7.2.1 User Input for Example A: Set 1 . . . 100
7.2.2 User Input for Example A: Set 2 . . . 101
7.2.3 User Input for Example A: Set 3 . . . 102
7.2.4 User Input for Example A: Set 4 . . . 103
7.2.5 User Input for Example A: Set 5 . . . 104
7.3 Example B Description . . . 106
7.3.1 User Input for Example B: Set 1 . . . 106
7.3.2 User Input for Example B: Set 2 . . . 107
7.3.3 User Input for Example B: Set 3 . . . 108
7.3.4 User Input for Example B: Set 4 . . . 109
8 Conclusion 111 8.1 Summary . . . 111
8.2 Future Work . . . 113
8.3 Final Remarks . . . 115
Appendices 126
List of Figures
1.1 Problem for Visualization . . . 3
1.2 Mental Map Example . . . 4
2.1 Information and Scientific Visualization . . . 10
2.2 Perception Visualization . . . 11
2.3 Examples of multidimensional visualizations . . . 12
2.4 Multi-dimensional Weather Visualization . . . 15
2.5 Multi-dimensional Flow Visualization . . . 16
4.1 Old Data Exploration Framework . . . 40
4.2 Data Exploration Framework . . . 40
4.3 Pexel Dimensions . . . 43
4.4 Example of a Pexel Visualization . . . 44
4.5 Navigation Assistance . . . 46
4.6 Discretizing Attribute Ranges . . . 51
4.7 Discretized Attribute Ranges . . . 52
5.1 Example of a Bayesian Network . . . 56
5.2 Types of Bayesian Networks . . . 60
5.3 Graphical Interest Rules . . . 73
6.1 Total Focus Event . . . 82
6.2 Capturing Elements . . . 85
6.3 View Wearing . . . 86
6.4 The Broad Focus View Volume . . . 87
6.5 Critique Interface . . . 90
6.6 Dataset Clustering . . . 94
6.7 Initial View Selections Before Adjustment . . . 96
6.8 Final Initial View Selections . . . 97
7.1 Pexel Visualization of the World . . . 99
7.2 Example A: Sequences 1 and 2 . . . 101
7.3 Example A: Sequences 3 and 4 . . . 102
7.4 Example A: Sequences 5 and 6 . . . 103
7.6 Example A: Final . . . 105
7.7 Example B: Sequences 1 and 2 . . . 106
7.8 Example B: Sequences 3 and 4 . . . 107
7.9 Example B: Sequences 5 and 6 . . . 109
7.10 Example B: Sequences 7 and 8 . . . 110
A.1 Model Transformation . . . 127
A.2 Viewing Transformation and Clipping . . . 128
List of Tables
5.1 Simple Training Set . . . 65
5.2 Training Set with Uncertainty . . . 68
5.3 Weight Performances . . . 69
5.4 Interest Rules . . . 71
6.1 Weight Insertion . . . 80
Chapter 1
Introduction
1.1
Visualization and Navigation
Modern technology facilitates the collection and storage of large amounts of information.
To-day, the management of large datasets is both productive and profitable for a multitude of areas
such as e-commerce, library sciences, network security, natural sciences research, and
engi-neering. However, the ability to efficiently analyze and process data has struggled to keep
pace with the recent growth rates of datasets. It is difficult for humans to navigate or
under-stand the structure of large modern datasets. Consequently, locating interesting elements and
phenomenon is more challenging than ever.
Computers are a critical tool for the management and analysis of information. In computer
graphics, the area of visualization focuses on creating graphical representations of data to help
users acquire a more thorough understanding of a dataset. As opposed to raw data, humans
can process larger amounts of visual information at greater speeds. Visualizations support
analysis tasks such as determining relationships between data elements, detecting global or
local structure, and navigating within an information space.
amounts of information. Visualizations are built and organized with consideration towards
how the human visual system interprets an image. For example, psychology has identified
pre-attentive visual processing: the human ability to rapidly and accurately identify variations
in certain visual features such as color or shape from its background. By controlling these
same features, visualizations can quickly indicate outliers, boundaries, or clusters of elements
within a dataset. Visualizations rely on effective visual metaphors to display relationships and
structure. For example, high values are often associated with brighter colors, while low values
are associated with darker colors. Visualizations attempt to intelligently choose the best way
to render information depending on the user’s tasks and goals.
Visualizations address the increasing scale of data in a variety of ways. Some techniques
attempt to create effective contextual overviews for representing an entire dataset while
selec-tively displaying detailed information only about local regions. Other techniques try to reduce
or summarize the data while preserving its important features. Other techniques ignore the
scale issue and defer the management of large amounts of data to the user; i.e., they rely on
users performing navigation to explore select areas of the dataset.
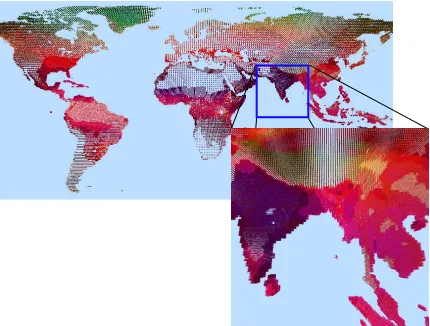
However, the effectiveness of most current visualization techniques remains susceptible to
datasets that exceed a maximum number of elements (see Figure 1.1). The resulting visual
representations are so large and complex that they become incomprehensible to the user and
prohibitive to simple navigation. To compensate, visualizations often place large portions of
information outside the user’s current view (i.e., off-screen). This further complicates
naviga-tion and inhibits user orientanaviga-tion by removing wayfinding cues from the user’s view. It also
hampers a primary goal of visualization: locating interesting data elements. Therefore, a
criti-cal problem for any visualization technique is efficiently locating and exploring this off-screen
information.
One alternative to creating new visualization techniques is to supplement existing ones with
en-Figure 1.1: A glyph-based visualization of global weather conditions. In the overview, details are occluded because of the dataset’s size, while the local view has relocated the majority of the dataset to outside the user’s view.
vironments. Mental maps allow users to accurately determine positions and perform efficient
wayfinding within a virtual world. Unfortunately, even with appropriate navigation support,
building accurate mental maps of large datasets can be a difficult, time-consuming task for
users. This is due to a number of reasons. First, a single view is often inadequate for showing
sufficient detail about a large environment. To build a proper mental map, large environments
must often be examined from multiple locations. By acquiring multiple perspectives, users will
better understand important positional relationships between distinctive features of the
visual-ization. Second, dense environments may contain significant amounts of noise that interfere
Centennial Parkway Western Boulevard A v ent F erry R o a d Centennial Campus Belk Tower Hillsborough Street State Fairgrounds Downtown Library Gym Main Campus Computer Science Building
Figure 1.2: The author’s mental map of North Carolina State University. There are three districts (Main Campus, Centennial Campus, and downtown), two landmarks (Belk Tower and State Fairgrounds), numerous nodes, major paths, and minor edges.
Lastly, dynamic environments complicate navigation, since important features and landmarks
potentially change their locations or appearances. As a result, existing mental maps become
obsolete and must be rebuilt.
Lynch claimed people form mental maps using environmental components such as edges,
paths, districts, nodes, and landmarks (see Figure 1.2) [76]. One way to construct a useful
navigation framework for a visualization is to build virtual equivalents of Lynch’s components.
These components should be based on data elements important to the user. For example,
elements of interest (nodes) can be clustered together into areas of interest (districts). Areas
of interest can then be connected to one another with a graph (edges and paths) to provide a
framework for building mental maps.
A critical issue of this scheme is identifying what parts of a dataset should act as the
compo-nents of this framework. Users are concerned with locating data elements exhibiting interesting
ele-ments. Thus, learning a user’s interests and reasoning with that information is a fundamental
problem for building effective navigation frameworks. This is a challenging problem because
interests are often user dependent, ephemeral, and unknown apriori.
One solution is requesting users to provide detailed descriptions of important properties
[27]. Any element matching these descriptions is automatically included in the framework.
However, this approach produces a static framework that only changes when users revise their
descriptions. Providing these descriptions can be an onerous task when a user’s preferences
are complex, extensive, or numerous. Thus, such a specification process will occupy time and
effort that could be better spent on exploring the data. A better framework would learn users’
interests as they explore a visualization and update the navigation framework based on their
interactions.
1.2
Preference Elicitation
Learning a user’s interests involves understanding how properties and data elements are
impor-tant to the user; i.e., identifying the user’s preferences. Preference elicitation is the process of
collecting preference information from users in efficient and non-influential ways. Preference
elicitation provides necessary information for developing accurate and beneficial user
prefer-ence models. These models are able to discriminate interesting elements from the rest of the
dataset. Research in areas such as artificial intelligence has developed many techniques for
representing user preferences and conducting efficient reasoning with these representations.
Preference elicitation techniques are focused on other aspects besides efficiently collecting
information about a user’s interest. They work to resolve conflicting preferences and address
how to make tradeoffs between competing user goals. They attempt to discover hidden
prefer-ences or erroneous user preference statements. Unlike other algorithms such as collaborative
an initial body of preference information.
Many preference elicitation techniques work in theory, but are unproven in real-world,
prac-tical applications. These algorithms have been implemented in environments especially suited
for the collection of preference information. These elicitation engines operate by repetitively
querying a user until they have acquired an adequate amount of preference data. It is unknown
how difficult it will be to modify these techniques to operate within an application not solely
focused on collecting preference information. In our case, we look specifically at visualization.
Visualizations are not designed to explicitly collect information about user preferences.
However, visualizations do share a similar goal with preference elicitation: locating interesting
and useful knowledge about a particular environment. This common goal provides important
connections for communicating preference information. An important issue is determining
how to modify these two techniques to co-exist effectively within the same environment. It is
unclear how a user’s behavior and interactions within a visualization context can provide the
information needed to construct a preference model.
1.3
Data Exploration
Integrating navigation techniques can improve visualizations designed for data exploration.
Data exploration is the process of analyzing a dataset in search of previously unknown and
interesting properties or elements within the data. When scientists create visualizations, they
often have general expectations about their data, but lack specific ideas of what they will find.
Rather, scientists explore visualizations hoping to find interesting phenomenon which might
not be easy to detect through standard mathematical or statistical analysis. Scientists often
arrive with broad interests about expected relationships and then proceed to look for unknown
specific values within their data. Such initial interests may change during the exploration
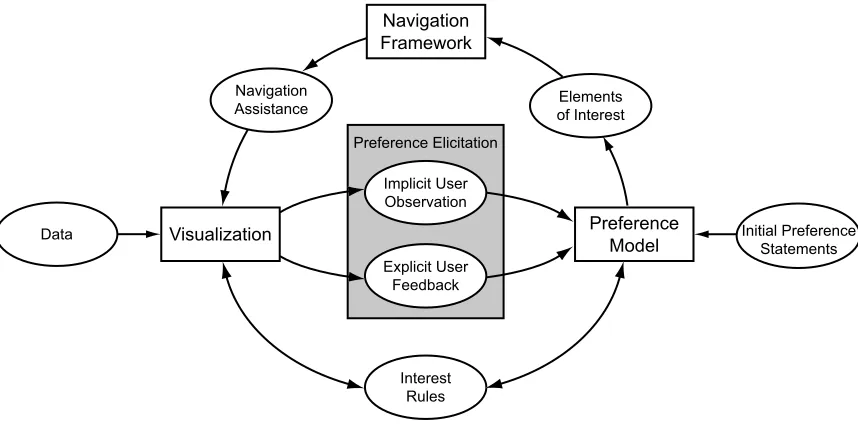
This thesis describes the creation of a more effective exploration system. This system is
composed of three primary parts: a visualization for exploring the dataset, a navigation
frame-work for wayfinding assistance to interesting areas, and a preference engine for identifying
in-teresting elements. The latter component dynamically identifies important areas in the dataset
while users interact with a visualization. Then, the system updates any existing navigation
sup-port and enables users to quickly locate any recently discovered off-screen regions of interest.
To accomplish this, the system must learn and model a user’s interests. This process involves
analyzing explicit feedback and interpreting user behavior.
There are many advantages to using such an exploration system. Automatically inferring
interest allows users to remain focused on exploring the dataset. Such systems can analyze
the state of a user model and generate the descriptions of what it believes is interesting even
when users cannot themselves explicitly describe their interests. Also, a computer can scan
and manage large data sets more efficiently than a human. It can quickly evaluate thousands or
millions of data elements within a visualization, while humans can examine only a few.
1.4
Research Goals
The overall goal of this work is integrating preference elicitation algorithms into visualizations
to create a more effective data exploration system. These elicitation techniques will provide the
necessary input for building a user preference model. This model will be used to automatically
and dynamically identify areas of interest within a visualization. In order to achieve this goal,
our system will implement the following components:
1. Create a revisable and iterative model of a user’s preferences that can be updated as new
preference information is collected. At any point in visualizing data, the model exists in
a state where it can attempt to determine if an element is interesting. Even with minimal
input is incorporated, the model will converge to a more accurate representation of the
user’s preferences.
2. Create or modify existing preference elicitation techniques and interfaces to collect
infor-mation from a user in parallel with visualizing the data. These tools and techniques will
minimize interference with the visualization process. The system can collect information
via explicit and implicit styles of elicitation.
3. Modify and format input collected by these mechanisms such that it is compatible with
the underlying user preference model. The types of preference input that can be collected
from a visualization often prevent a simple translation.
4. Integrate these components into an existing visualization and navigation system. This
new preference model and its complimentary techniques will improve an existing system
by making it a more dynamic and powerful tool for data exploration.
The remainder of this thesis is organized as follows. Chapter 2 provides a general
back-ground on visualization techniques and some of the challenges they face. Chapter 3 explores
the existing research on modeling and eliciting user preferences. Chapter 4 gives an overview
of the augmented visualization and navigation system. Chapter 5 describes the motivation and
selection of the chosen user preference model. Chapter 6 discusses how user input is collected
from a visualization and integrated into the underlying preference model. Chapter 7 provides
examples demonstrating how these techniques and the user model perform. Chapter 8
Chapter 2
Visualization
2.1
General Overview
A datasetDis a collection of data elements,D={e1, . . . , eN},whereN is known as the size ofD. Every elementeiis an assignment of scalar values to an attribute setA ={A1, . . . , AM},
where M is known as the dimensionality of D. Thus, ei = (ai,1, . . . , ai,M). These attribute variables may assume discrete or continuous values from either a bounded or unbounded range.
A visualization is the construction of a function mapping attribute values to visual features. The
challenge of visualization is finding good mappings to accurately represent the data.
Visualizations are often categorized as either information visualization or scientific
visu-alization. Information visualization is typically used to manage abstract data, or data lacking
any associated physical properties. Examples of abstract data include electronic documents,
network traffic, demographic information, user profiles, and e-commerce transactions. Often
information visualizations try to impose a meaningful geometry that emphasizes important
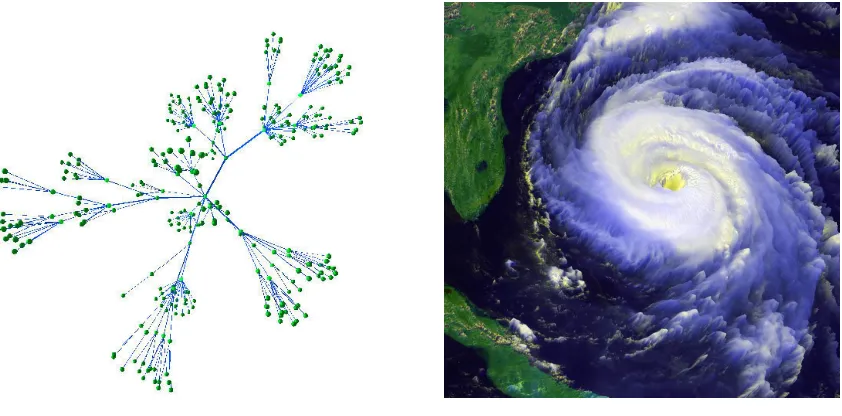
relationships within a dataset (see Figure 2.1a). Scientific visualization focuses on data
pos-sessing some inherent geometric structure (see Figure 2.1b). Examples of physically-based
(a) 3D Graph Visualization (b) Hurricane Fran Visualization
Figure 2.1: (a) is an example of an information visualization showing a hierarchy graph laid out in a radial manner within 3 dimensional space (courtesy of Steve Benford, University of Nottingham, UK). (b) is an example of a scientific visualization of Hurricane Fran. The image was built from data collected with a satellite (courtesy of NASA).
visualization are not mutually exclusive. Techniques from either area are used for representing
both abstract and physically-based datasets.
Visualizations rely on the strengths of the human visual system and common visual metaphors
for creating effective images. Visualizations incorporates research from areas outside of
com-puter graphics; for example, psychology, art design, and human comcom-puter interaction. By
studying how the human visual system interprets visual information, visualization researchers
can develop non-intuitive, effective representations of data (see Figure 2.2) [111, 101]. Also,
they maximize the use of other common visual properties such as color and texture [109, 110,
49, 50, 52]. By studying techniques used by artists and designers, visualizations can become
both effective and engaging representations of data (see Figure 2.5) [75, 53, 68].
While many visualization techniques succeed in creating graphical images that effectively
Figure 2.2: This visualization is based on a cognitive model that describes how the human visual system perceives orientations from a local configuration of dots [101]. Here, the model is used to visualize flow in simulated supernova data. Color corresponds to magnitude.
commonly found in modern datasets. Visualization must address the fundamental problem
of how to represent large amounts of information within a limited display. Consider how a
standard display device supports a 1280× 1024 pixel resolution, approximately 1.3 million
pixels, to represent datasets regularly containing many more data elements. Moreover, data
elements may be composed of multiple attributes, further increasing the demand on available
display resources. This forces information to be re-located “off-screen,” usually by way of
filtering or clipping mechanisms. Visualization techniques are designed to intelligently choose
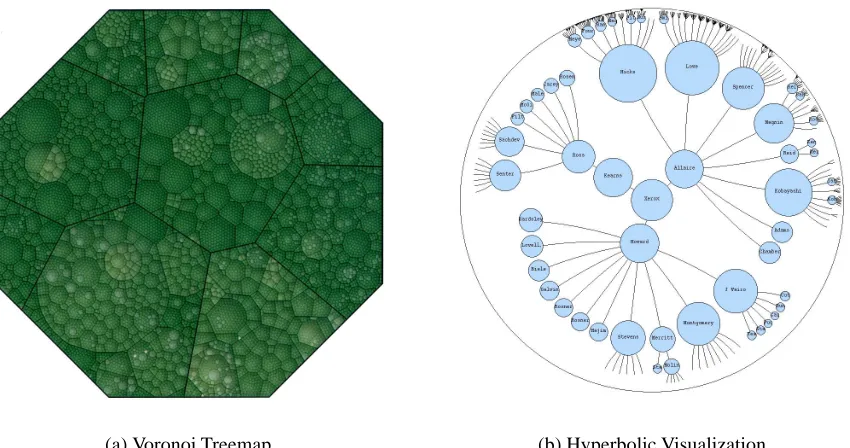
(a) Voronoi Treemap (b) Hyperbolic Visualization
Figure 2.3: (a) is a overview+detail visualization technique: a voronoi treemap visualizing a hierarchical structure with 16288 nodes and 7 levels. [5]. (b) is a focus+context visualization technique, the hyperbolic browser, displaying another hierarchical structure [72].
2.2
Large N
When visualizing a dataset with a large N, individual or groups of data elements must either be warped or removed from the user’s view in order to encapsulate the entire dataset within the
display. focus+context and overview+detail are two families of visualization techniques that
attempt to fit large numbers of data elements within a single screen. These techniques try to
balance displaying global structure with local detail in the user’s view.
overview+detail techniques create a global overview of the dataset while providing users
with interactive tools for accessing local, detailed information. Overviews are used to
effi-ciently search the dataset for interesting areas and to identify global structure. Meanwhile local
views provide more detail about individual data elements. These two views often compete over
screen time or display space. Therefore, multiple views are provided either at different times
multiplex-ing) [18]. For example, Lifelines contains an overview window of a patient’s medical history
and supporting local windows for accessing more details about particular aspects of the patient
medical history [89]. Semantic zooming enables users to transform their current view from a
general overview into a more detailed view [9, 10]. The treemap (see Figure 2.3a) lays out
local information to concurrently display the global structure of the data [99].
focus+context techniques present local information (focus) simultaneously with global
in-formation (overview), often in a single unified image. Many focus+context techniques warp
or filter data elements from the display. Elements close to a focal point are represented with
more detail than those further from the focus [39, 72, 77, 93, 94]. The fish-eye technique uses
a value function coupled with an element’s distance from the focal point to determine how,
if at all, to display a data element [38, 39]. The hyperbolic browser (see Figure 2.3b) maps
elements to a tree-structure in hyperbolic space. This space is projected onto a Euclidean disk
for exploration. The projection produces a warping effect similar to a fish-eye lens [72, 71].
These techniques provide effective ways of representing larger numbers of data elements.
However, they are still ineffective for very large datasets. Once their thresholds are reached,
the introduction of additional data elements create cluttered visual representations.
Visual-izations of large datasets may be thought of as large virtual worlds. Unfortunately, most of
these techniques do not provide any navigation support for exploring these worlds. As a
re-sult, users may become “lost” and unable to successfully traverse from one location to another.
Moreover, these techniques do not account for the complications associated with visualizing
multidimensional data elements.
2.3
Large M
Multidimensional datasets pose related, but somewhat different, problems. Data elements
rep-resented at the same spatial location. Multidimensional visualization techniques have been
categorized into five types [112]:
1. Brushing techniques allow users to reveal additional information about multidimensional
data elements when they are highlighted with a “brush” [8, 108].
2. Panel Matrix representations, such as the HyperSlice and hyperbox, create two
dimen-sional plots of different attribute values [3, 105]. These plots are presented alongside
each another for the user to analyze.
3. Hierarchical displays organize multidimensional data into a hierarchical structure
pos-sessing different levels of display [32, 31, 80, 81].
4. Non-Cartesian displays construct new axes on which to plot data attribute values [57, 65,
64]. These displays provide representations that simplify the detection of relationships
between data attributes.
5. Iconography uses collections of icons or glyphs to represent multidimensional data [43,
51, 50, 88, 110]. These glyphs often use texture properties to represent multiple data
attributes at the same location.
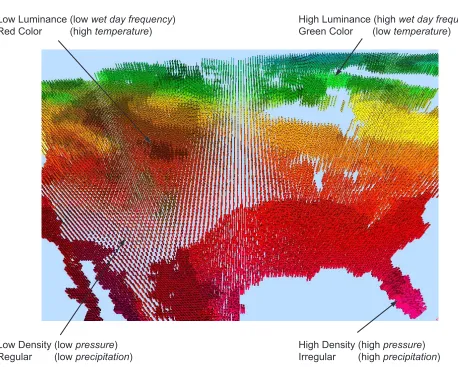
Iconographic visualization techniques map data attributes to visual features. Attribute
val-ues stored in a data element can then be used to vary the visual appearance of an elements’s
glyph. Examples of common visual features include color, density, height, regularity, and
ori-entation, etc (see Figure 2.4). The human visual system can perceive and process different
degrees of variance among these visual features. For example, there are seven different color
values and three different densities that the human visual system can rapidly and accurately
identify [49, 51]. Visual features sometimes interfere with one another. Therefore, effective
Figure 2.4: (b) shows the use of texture to represent the weather conditions of the United States [50]. Height, color, regularity, and luminance visual features are mapped to the weather attributes wind speed, mean temperature,
precipitation, and wet day frequency, respectively.
As the number of dimensions of a dataset increases, the number of visual resources required
to render each data element also increases. Multidimensional visualization techniques focus on
how to best represent multidimensional data. They are not as concerned with the total number
of elements to be displayed and assume there will be an adequate amount of screen space for
the resulting image. As elements compete for display resources, information becomes clipped,
Figure 2.5: This image shows properties of two dimensional flow about a cylinder [69]. Arrow size and direction correspond to the magnitude and direction of the flow, vorticity corresponds to the background color, and ellipsoid properties correspond to divergence and shear. Additional rectangular glyphs correspond to turbulent charge and
Chapter 3
Preferences
3.1
Decision Theory
The goal of preference elicitation is to facilitate the construction of an accurate user model.
This model is used by a decision support system to assist a user with the completion of a task.
Preference elicitation is designed to provide the necessary data for the relevant decision support
framework. The theoretical foundation forming the basis of these models is found in decision
and utility theory [63, 34]. Decision and multi-attribute utility theory focus on the evaluation
of choices and outcomes for a decision problem or scenario.
Outcomes are defined by the assignment of values to a set of attribute variables, X =
{X1, ..., Xn}. Attribute variables are either discrete,xi ∈ {xi,1, ..., xi,m}, or continuous,xi ∈
[a, b]. The set of outcomes O considered for a decision problem is contained by the outcome
space Ω. Typically, Ωis defined by the Cartesian product of X. Thus, O ⊆ Ωwhere Ω = {X1×X2×...×Xn}. Consequently, it is common forO to be very large. Even an outcome space composed of discrete attribute variables has the potential to be combinatorially large.
For many scenarios, Ω contains outcomes infeasible in the context of the current decision
{Xα, Xβ}, each variable corresponding to one of two separate auction agents, αand β. The value ofXαorXβ is a possible assignment of goods from the set{A, B}to the corresponding agent. Therefore, xα, xβ ∈ {∅, A, B, AB}. An outcome o ∈ Ω has the form o = {xα, xβ}. One potential value iso = {∅, AB}, corresponding to agent α receiving nothing and agentβ
receiving everything. Obviously, any allocation where both agents acquire the same good is
infeasible (e.g.,o ={A, AB}) and should not be considered by a decision maker. However, in practice,Ωwill remain very large, even with the removal of infeasible outcomes.
In order to make decisions based on a set of outcomesO, a decision maker often simply needs an ordering of the outcomes determined by the user’s preferences. This is called a
preference relation and is denoted by . Given oi, oj ∈ O, if oi oj, oi dominates or is preferred tooj. Typically, the preference relation is induced by a value function,v(o) :O →R. For a given value functionv and its induced preference relation,, the following is true,
∀oa, ob ∈O, oa ob ⇐⇒ v(oa)≥v(ob).
Value functions operate on the set of outcomes or subsets of the attribute variables
them-selves. The value for a given attribute variable dominates another value if the following holds
true,
∀a, b∈ Xi, a b ⇐⇒ v(a)≥v(b).
Value functions reflect how much acquiring a particular outcome is worth to the user.
How-ever, in many decision scenarios there may exist a degree of uncertainty. Choosing one action
may result in receiving outcomeo1with probabilityp1or outcomeo2with probabilityp2. Since any one action no longer guarantees a particular outcome, the value function alone is
insuffi-cient for modeling a user’s decisions in scenarios with uncertainty. Users need a more complex
incorporate a user’s attitudes about risk along with their valuations of outcomes [63].
A main contribution of utility theory is a theorem proving the existence of a utility function,
u(x) :O →R. This function induces a unique preference relation,, overO. Unfortunately, a preference relation does not necessarily induce a utility function over the set of outcomes
because the utility function must also account for the user’s attitudes about risk. It is common
for the utility function to be equivalent to the user’s value function, especially in scenarios
without uncertainty. However, this is not a guaranteed condition. Utility functions also induce
a preference ordering on the probability distributions (or lotteries) over the outcome space. Let
P ri andP rj be two probability distributions over the outcomes caused by invoking either of two actionsaiandaj. Then,
ai aj ⇐⇒ X
o∈O
P ri(o)u(o)≥X
o∈O
P rj(o)u(o)
for the utility functionu. When assigning values for an outcomeo, the utility functionumust consider the uncertainty of attainingoand the user’s attitudes toward risk to correctly preserve the user’s preference relation for actions. The above relation implies that a user will prefer
the action resulting with the maximum expected utility (MEU). Elicitation systems assume the
user is rational; i.e., the user prefers the outcome with the maximum expected utility over all
other outcomes. For some decision problems, there exists a single utility function for a group
of users, while other problems mandate a unique utility function for each user.
Because the utility function for the user is frequently unknown apriori, constructing the
utility function is often the first step in building a decision support system. However, this is
a difficult task because building a complete utility function may require a full description of a
user’s preferences. Such a specification may be unavailable and difficult to acquire. The main
goal of preference elicitation is retrieving this information to build a user’s utility function and
3.2
Challenges of Elicitation
Despite the challenges of building an accurate and effective user model, eliciting preference
information alone is a non-trivial task. Many considerations need to be made by a system,
or elicitor, during the elicitation of preference information. Otherwise, systems may
inaccu-rately model the user, collect erroneous information, or unintentionally influence the user’s
preferences [12].
Having a user fully specify his preference order ab ovo is typically impractical for a number
of reasons. First, the potential number of outcome pairs the user must examine is a function
of the size of the outcome space. In the best case, an outcome space with discrete variables,
the outcome space grows combinatorially with respect to the number of attribute variables and
values. However, outcome spaces composed of even a small number of variables can generate
far too many comparisons for the user. Spaces with the infeasible outcomes removed still
may require prohibitive amounts of time and effort on a user’s behalf. Research has shown
that acquiring the right partial preference information can be as effective as having a user’s
complete utility function [47, 56].
Second, preferences are sometimes dynamic and ephemeral. It is common for different
users to have varying preferences. Often, users share some common preferences that can be
used as a reference or starting point for the elicitation process. Elictors must be prepared
to deal with each user on an individual basis, while maximizing the use of known common
preferences. Another important factor is users may change their preferences while they interact
with a system. As the user performs a task, old preferences may give way to new ones. Elicitors
need to be able to detect this change and make the appropriate adjustments.
Pu et al describe another important issue that preference elicitation techniques should
ad-dress [90]. Given the elicitation scheme, a particular choice of attributes may force users to
consider a traveler who is looking to take a long weekend trip to New York. He wishes to
restrict the amount of money he spends on airline tickets to only 300 dollars (his fundamental
objective). If an elicitation scheme asks him how much he is willing to spend on his departure
ticket, the traveler is forced to form a means objective. If he estimates to spend equal amounts
of money on both departure and return flights, specifying 150 dollars would exclude a
poten-tially optimal outcome of a 200 dollar flight into New York on Thursday afternoon paired with
a 75 dollar red-eye return flight on Sunday night. Elicitors must provide users with ways to
state their fundamental objectives.
Furthermore, it has been shown that the method of elicitation can influence how users
re-spond to elicitation [12]. Users may accidentally misinform the system about their preferences.
Elicitors try to prompt the user as infrequently as possible to keep users focused on their
pri-mary tasks. Well-designed queries provide the highest yield of preference information while
simultaneously reducing any error in the model.
Incremental preference elicitation attempts to satisfy the above criteria by intelligently
de-ciding how to subsequently elicit the user based on information already collected. Incremental
elicitation techniques do not always have initial preference information about the user. This is
the case with many scenarios. Incremental elicitation allows users to revise their preferences
as they interact with a decision support system. Such functionality is not possible with systems
requiring full elicitation before the decision making process begins.
3.3
Types of Queries
The first step to eliciting preference information is determining the form of the questions
sub-mitted to the user. Elicitation queries provide an elicitor with appropriate information for
im-proving its understanding of a user’s preferences. Elicitation queries need to be simple enough
The simplest way to discover a user’s preference relation is requesting the user to compare
two possible outcomes. These are order queries and they often have the form of “Do you
preferoa orob?” Many models assume that preferences are transitive: ifoa ob andob oc
then oa oc. If transitivity holds across a user’s preferences then order queries can provide a great deal of information about preference. Otherwise, order queries become an inefficient
elicitation query because they only reveal local relationships about different outcomes. Another
disadvantage to order queries is that they only provide an ordering of the outcomes. There
is no quantitative result describing how much a user prefers one outcome to another. Order
queries only provide qualitative information about the user’s preference relation and can not
fully determine the user’s value function. However, it is often easier for users to choose the
preferred outcome when compared with another instead of specifying absolute numeric values
for each outcome.
Rank queries are a more specific type of order query. They request users to explicitly rank
an outcome among all other outcomes. Rank queries may have the form “What is the rank of
oa?” or “What outcome has rank r?” These queries are not always feasible since the set of outcomes is possibly too large for users to produce accurate rank values. Used in conjunction
with order queries, rank queries are good for quickly approximating where a given outcome
resides in the preference relation.
Value queries provide a quantitative measure of preference between outcomes. They
es-tablish how much a user prefers one outcome to another; i.e., a quantitative preference value.
They might be of the form “What is the value for outcomeoa?” The ability of a user to truth-fully answer a value query often depends on the size of the set of outcomes. It is difficult for
users to compute accurate values for individual outcomes when dealing with a large number of
outcomes.
A variation of the value query is the standard gamble query. The standard gamble query
willing to make in order to acquire this particular outcome [83]. The standard gamble query
is common among decision theory research because it provides exact information for very
accurate revisions to the preference model. The standard gamble query has the following form:
Consider three outcomesoa,ob, andoc, where it is known the user’s preference ordering exists such thatoa ob oc. A standard gamble query asks if the user prefers to definitely acquire
ob or accept a gamble (or lottery) where the user acquires oa with probabilityπ or oc with probability(1−π). Utility theory guarantees a value forπwhere the user is indifferent between acquiringoband accepting the gamble. The value ofπfor which the user is indifferent between the gamble and the outcomeobdetermines the normalized utility value ofob: u(ob) =πu(oa)+
(1−π)u(oc). Typically, the best and worst case outcomes are used foroaandob. Ifu(obest) = 1
andu(oworst) = 0, the aforementioned formula easily shows that π is the value of the utility function forob.
Potential outcomes or solutions are another form of queries used to determine the
prefer-ences of the user. This type of elicitation is often search-driven. Users move through a solution
space evaluating possible candidates chosen by the system. How the user responds to potential
candidates determines the selection of future candidate optimal outcomes. Search is driven by
having the user indicate the specific properties preferred or disliked from the given examples.
3.4
Preference Structure
Given that even the size of outcome spaces composed of only a few attributes is potentially
large, decision support systems must take advantage of any structure inherent to the user’s
preferences. Considering preference structure facilitates an efficient interaction between the
system and the user by reducing the amount of information the user must provide. Decision
theory describes various forms of structure found in preferences. Most of these forms are a
problem piecemeal [63, 4]. In other words, identifying independence reduces the number of
outcomes for the user’s examination by decreasing the number of independent combinations
of attributes for consideration. Independence also allows for the construction of less complex
and more structured utility functions.
The most basic form of independence is preferential independence. Preferential
indepen-dence considers only the preference ordering over the individual outcomes for a decision
prob-lem. A set of attributesY ⊂ X is preferentially independent ofX −Y when the preference order over outcomes with varying values of attributes inY does not change when the attributes ofX−Y are fixed to any value; i.e., the preference order of outcomes with attribute values in
Y does not depend on the values of attributes inX−Y. Letαbe an assignment of values to the attributes inY andγ be an assignment of values to attributes inX−Y. IfY andX−Y are preferentially independent then everyx ∈ X has the formx = (α, γ). Formally, preferential independence is defined as
∀γ, γ0 ∈(X−Y) : (α, γ)(β, γ) ⇐⇒ (α, γ0)(β, γ0)
withα, β ∈Y.
Utility independence is concerned with the utility function as well as the user’s preferences
among the outcomes. Not only must the induced preference relation stay unchanged, but the
user’s attitude about risk or the relative strength of preference between outcomes must also
remain the same. To understand utility independence, the notion of conditional preference
must be described. For a conditional preference relationwithY ⊂ X, letα andα0 be two assignments of values to the attributes inY. IfZ ⊆ X−Y, letγ be an assignment of values to the variables inZ. αis conditionally preferred toα0 with respect toγ if
Conditional preference can also be applied to probability distributions over outcomes. Using
the same assignments for Y and Z described above, consider a probability distribution Pr overX. There exists a unique distribution Prγ such that the marginal probability of Prγ (the
probability that the attributes ofZ take the values ofγregardless of the values of the attributes in Y) over Y is Pr and Prγ gives the probability of 1 to the values of γ. Given a utility
function with its associated preference order , the conditional preference over X given γ, γ, is defined as
Praγ Prb ⇐⇒ Prγa Prγb
for two probability distributions Praand PrboverX.
With the definition of conditional preference established for probability distributions over
the set of outcomes, it is possible to state a concrete description of utility independence. IfX =
(Y, Z),Y is said to be utility independent ofZ if the conditional preferences for distributions overY given an assignment of valuesγ to the attributes inZ are independent of the particular values ofγ. Moreover, it is known thatY is utility independent ofX −Y if and only if the induced preference structure’s utility function has the form,
u(X) =f(X−Y) +g(X−Y)h(Y)
for a positive functiong[4]. A utility function in this form is an improvement since the number of independent values to collect is fewer than the number required of preference structures with
dependent structure.
A stronger independence can be identified in a preference structure if the following
additive independent. A set of variables for an outcome space which is additive independent
has a utility function of the form
u(X) =
k
X
i=1
fi(Xi)
where fi is considered the utility function for the attribute Xi, also known as the subutility
functions.
Independence among attributes is important to preference elicitation because it allows the
creation of more efficient elicitation techniques and interfaces. Given the potentially large
number of outcomes a decision problem can create, independence among attributes allows
elicitors to refine the set of potential queries needed to build an accurate representation of the
user’s preferences. Also, elicitors can identify the important attributes and focus queries on
their values. For preference structures with additive independence, Keeney and Raiffa provide
a procedure for reducing the number of queries by creating scales for each of the components
of the utility function and querying the user about the behavior of each subutility function [63].
Then, variations of the standard gamble and value queries are used to construct the appropriate
scaling constants,ki.
Chajewska and Koller work to construct more generalized factorizations of a utility
func-tion. They treat utility functions as random variables and create a statistical model of the
expected utility function. Their model assumes the population of users can be segmented into
subpopulations. Members of the subpopulations typically have similar utility functions, thus
allowing the creation of a probability density function over a subset of the variables ofX. Let
C be a set of clusters formed with variables from X, C = {C1, . . . , Cm} where Ci and Cj
for every i and j are not necessarily disjoint. Then, a utility function is said to be factored
according to C if there exists a function ui : Dom(Ci) → R such that the utility value of
functions are the subutility functions. Note, that this “factorization” allows for multiple clusters
to share variables inX, a condition not permitted with additive independence. The statistical model creates a subutility function for each subpopulation and then uses this function for
guid-ing the elicitation process. Unfortunately, this work depends on the existence of a pre-existguid-ing
database of user utility functions.
Perhaps the most important contribution of independence from an intuitive aspect is it
al-lows the construction of simple and manageable utility functions. For additive independent
attributes, the user’s utility for any given outcome can be broken down to the sum of values
for individual attributes. Instead of a utility function withn parameters, the system now has
nutility functions with one parameter. Revision of the utility function takes place at the most atomic level: the attributes. It can be accomplished by manipulating scaling constants and the
value of the utility function for each attribute value. Here, changing the utility function with
respect to one attribute has no impact on the other attributes’ utility functions. Thus, systems
can revise one attribute at a time. This simplifies interface design and allows users to more
easily evaluate outcomes.
3.5
Preference Representation
The elicitation process often depends on how a user’s preferences are represented in the
sys-tem. The representation structure determines what information the elicitor retrieves and the
sequence in which it is collected. The representation of a user’s preferences is typically
asso-ciated with modeling the user’s utility function. Since many decision scenarios manage
multi-attribute problems, most representations are capable of expressing the user’s preferences over
multidimensional datasets. These representations tend to be either vector-based, graph-based,
3.5.1
Vector Models
Vectors are fundamentally simple representations for preferences. The content of vector
rep-resentations depends on the particular elicitor. Some systems create a vector of length|O|and store the values or utilities of every potential outcome. Evaluating the utility of a particular
out-come involves referencing the corresponding index of the vector. In order to adjust the value of
the utility function, the vector’s values are updated accordingly. These vectors explicitly model
the entire domain and range of the utility function [14, 21, 19, 46]. Vectors provide a
deter-minate representation of the utility function, offering little information about how the utility
value was computed for any given outcome. Consequently, vectors do not explicitly represent
any inherent structure within the preference relation. However, there do exists algorithms for
vector representations that detect preference structure [20].
Sometimes vectors store components of a decision problem; i.e., attribute values or
con-straints. The utility value for an outcome is computed with a subset of the vector’s entries.
The Automated Travel Assistant maintains a vector of constraints and a vector of weights [74].
Each constraint is a function Ci(x) : dom(Xi) → [0,1], where Ci(x) = 0 implies the con-straint is fully satisfied andCi(x) = 1means the constraint is fully unsatisfied. ATA assumes the preference structure’s attributes are additive independent. The authors use these
defini-tions to construct an error function. This function provides an antipodal utility function and
measures how unimportant a given outcome is for a user,
error(|x1, . . . , xn|) =
n
X
i=1
wiCi(vi)
where wi is a weight ranging from[0,1]forCi. As the user provides additional information about the values ofCi andwi, the vector is updated and the error function begins to approach zero; i.e., the constraints more accurately represent the user’s preferences. ATA allows for
ATA models user preferences as a Constraint Solving Problem (CSP). CSP preference
rep-resentations have been used in a variety of systems [15, 17, 74, 97, 103]. Upon acquiring
an adequate set of constraints, C, constraint solving routines can determine any potentially optimal solutions. IfC is not tight enough to eliminate the majority of candidates, additional constraints are elicited from the user. In many traditional CSP solvers, constraints are hard; i.e.,
either fully satisfied or not. When no outcome satisfies the entire set of constraints, CSP solvers
relax some constraints to find an optimal solution. Hard constraints alone may be inadequate
for modeling preferences, since it is possible for users to have conflicting preferences. Ranking
a set of hard constraints helps with determining the order in which to relax constraints.
Rank-ing also implicitly creates an assignment of importance weights. These weights can model how
strongly an outcome satisfiesC. This is helpful in scenarios where a user’s utility for a few highly-ranked constraints may be surpassed by the utility of a larger number of lower-ranked
constraints. The use of soft constraints offers even greater flexibility because they model the
degree to which an outcome satisfies a set of constraints. This quantitative measurement is
typically the sum of the products of an importance weight with a satisfaction value for each
constraint. This technique is very similar to the error function of ATA.
3.5.2
Graph-based Models
Network-based and graph-based structures are another method for representing user
prefer-ences [4, 13, 24, 23, 48]. The topology of these structures assists with realizing preference
structure by contributing a visual representation of how outcomes are dominated by other
out-comes. Nodes of these structures are typically attribute values, but may be other appropriate
entries, such as outcomes. Thus, graph-based models can provide a more intuitive
representa-tion than vectors.
structure [25]. Preference structures tend to be transitive; i.e., if oa ob and ob oc then
oa oc. However, some decision scenarios allow for oc oa. It is difficult to construct a single, consistent utility function whose output can successfully represent an intransitive set of
preferences. Graph-based models can show this by creating cycles in the underlying graph.
Graph-based models can also reveal independence within a user’s preferences. Bacchus and
Grove explored a graph-based representation of utilities exhibiting a weaker form of additive
independence, called conditional additive independence [4]. This work helps decompose a
utility function into smaller subcomponents which are constructed with subsets of the attribute
space. These subsets are not necessarily mutually exclusive.
Boutilier et al created a network to capture and represent conditional preferential
inde-pendence [13]. A conditional preference network (or CP-network) creates a node for every
attribute Xi. For every attribute Xi, the user must identify a set of parent attributes whose values influence the preferences over the values ofXi. Each node,ni, has an associated table describing how the parents’ values affect the preference for the value of Xi. Using a set of initial conditional preference statements, a CP-network can rapidly determine which of two
outcomes dominates the other, or if there is insufficient information to determine the dominant
outcome. In the latter situation, the CP-network will identify an outcome whose preference
information will fill the necessary gap in the CP-network’s logic.
Conen and Sandholm make use of graph-based structures to store preference information
for a combinatorial auction setting [24, 23]. They build an augmented order graph which
is composed of a node for every possible bidder and bundle; (i.e., a subset of the items up
for auction). A feasible allocation (an outcome) is a set of nodes from the augmented order
graph where no two nodes represent the same agent and no two nodes have bundles containing
the same item. Algorithms use the augmented order graph to determine the set of
Pareto-optimal allocations. An allocationAis Pareto efficient if there is no other allocationB where
represents the bundle allocated to agentibyA). The graph can also be used to collect welfare-maximizing allocations: an allocation A where Pni=1vi(Ai) is maximized among all other allocations. Using the set of welfare-maximized allocations, value information can be elicited
from the user to reduce the set of candidate allocations and find the optimal solution.
3.6
Selecting the Next Query
Elicitation queries are designed to reveal relevant information about preferences of the user.
Intelligently building a proper sequence of questions makes elicitation an efficient process.
Elicitors try to collect the largest amount of preference information with the least number of
questions. Therefore, elicitors choose the sequence of preference queries with consideration.
3.6.1
Metric Techniques
The most intuitive technique is creating a metric that evaluates the usefulness of potential
ques-tions. Various research projects have adopted a value of information metric which measures
the expected improvement in preference information after incorporating the answer to a given
query. The form of the value of information function depends on the decision support system.
Given a potential query, Chajewska et al compute the expected utility of the corresponding
outcome when each possible answer is factored into the utility function [21]. The new utility
values are also weighted by the likelihood of a particular answer from the user. This likelihood
is specified by a statistical model of the user. The average of the potential utilities minus the
current expected utility defines the value of information for any query. Unfortunately, this
func-tion only computes a myopic value of informafunc-tion; i.e., it does not consider the consequences
of future queries. Computing the full value of information is intractable and requires the
look-ahead consideration of all possible future combinations of questions and answers. [14] extends
the elicitation process. This approach analyzes the value of sequences of questions before
recommending the next query.
Boutilier et al adopt a similar metric technique for their decision scenarios [13]. For a given
decision scenario with potential actionsai, they examine the amount of regret a given action might receive. Factoring uncertainty into their model, the expected value of a given actionai
(for the elicitation context an action issuing a query to the user) is defined as
EV(ai, w) =X
o∈O
P ri(o)u(o, w)
for a given a distribution of tradeoff weightswfor the utility function. Definea∗w as the action with the highest expected value; i.e., a∗w is currently the best action to take for this decision problem. The regret ofaiwith respect towis defined as,
R(ai, w) =EV(aw∗, w)−EV(ai, w)
which is a measurement for the loss incurred by performing ai instead of the optimal action
a∗w. UCP-networks are used to form a set of linear constraints for the possible tradeoff weight values. These constraints define a subset of the distributions over outcomesOdenoted asC.
For a given set of constraintsC, the maximum regret of actionaiwith respect toCis defined as
M R(ai, C) = maxw∈CR(ai, w)
The set of constraints are modified using queries with a finite number of responses to minimize
the regret-based query selection process.
Ha and Haddawy use a metric in their work called the rank correlation coefficient [45].
They needed a technique to measure the difference in the importance rankings of attributes
between two different strategies. Considering permutations of the forma=a1, a2, . . . , anand
b=b1, b2, . . . , bn, the rank correlation coefficient is defined as
ρ(a, b) = 1− 6
Pn
i=1(ai−bi)2
n3−n
where the range of ρ is −1 ≤ ρ(a, b) ≤ 1. A value of 1 corresponds to two permutations being identical, while a value of -1 corresponds to a complete reversal of rankings. The rank
correlation coefficient is used to identify the two potential strategies whose rankings differ the
most from one another. Then, the system elicits the user for information on how to merge the
preferences of these two strategies into a single new strategy. By merging strategies, the system
reduces the number of candidate strategies for the user’s consideration.
3.6.2
Providing Examples
A major disadvantage of some valuation techniques is how they force users to examine and
make statements about attribute values out of context. Moreover, making such detailed
state-ments can be difficult for a user with underdeveloped or generalized preferences. One solution
is using general preferences to isolate a set of candidate examples from the outcome space.
Users modify the preference model by examining and providing feedback about these
exam-ples.
Providing examples to the user, or exampling, is perhaps the most intuitive way for users
to provide preference information. Users have the ability to rapidly return accurate feedback
about candidate solutions. They inform the system about which attribute values they like or

![Figure 2.2: This visualization is based on a cognitive model that describes how the human visual system perceivesorientations from a local configuration of dots [101]](https://thumb-us.123doks.com/thumbv2/123dok_us/1521542.1186495/21.612.99.534.67.340/figure-visualization-based-cognitive-describes-visual-perceivesorientations-conguration.webp)
![Figure 2.5: This image shows properties of two dimensional flow about a cylinder [69]. Arrow size and directioncorrespond to theproperties correspond to magnitude and direction of the flow, vorticity corresponds to the background color, and ellipsoid diverge](https://thumb-us.123doks.com/thumbv2/123dok_us/1521542.1186495/26.612.98.533.224.474/properties-dimensional-directioncorrespond-theproperties-correspond-magnitude-corresponds-background.webp)