2017 2nd International Conference on Wireless Communication and Network Engineering (WCNE 2017) ISBN: 978-1-60595-531-5
An Efficient Energy Conservation Dynamic Consistency
Algorithm for SDN Control Plane
Jia-qi LI
1,2,3, En-chang SUN
1,2,3,*, Dong-ying ZHANG
4and Yan-hua ZHANG
1,2,3 1Beijing Advanced Innovation Center for Future Internet Technology. Beijing University of Technology, Beijing, 100124 China
2
Beijing Laboratory of Advanced Information Networks, Beijing, 100124 China
3
Faculty of Information Technology. Beijing University of Technology, Beijing, 100124 China
4
Information construction and Management Center. Beijing University of Technology, Beijing, 100124 China
*Corresponding author
Keywords: SDN, Control plane, Consistency, Dynamic.
Abstract. Centralized control, the main idea of SDN (Software-Defined Networking) to simplify the control flow, may make SDN suffer from performance bottlenecks. Therefore, we need to use a distributed control plane to overcome the problem. But there are also consistency problem in distributed control plane of SDN. In this paper, we first quantize the consistency, communication costs and availability with relevant research of SDN distributed control plane. Secondly, by normalized calculation, we find the relationship between them. Then we propose a dynamic consistency algorithm for the control plane of SDN. Finally, we corroborate the validity of the algorithm by some experiments. The experimental results show that the proposed algorithm can effectively improve the plane consistency of SDN control.
Introduction
With the popularization of SDN network, centralized control[1] not only brings innovation and convenience for network applications[2] but also brings some problems such as reliability, scalability and availability. How to deploy in the WAN instead of how to deploy in the virtual machine and LAN has become a critical issue in the development of SDN. In the face of the growing demand for data and the expansion of SDN networks the most important aspect is the expansion of the control plane.
Controller who play a very important role in SDN. is the convergence place of information of the whole network and starting point of the whole network instruction. It plays a very important role in grasping the resource view of the whole network and improving the delivery of network resources. Centralized of control ability means the safety and performance of the controller becomes the bottleneck of the whole network[3]. Once the controller is not guaranteed in terms of performance or security, the speed of individual controller performance cannot meet the requirements of the controller to improve the speed. followed by the whole network of service capacity degradation or even paralyzed. In addition, a single controller cannot cope with multiple regional SDN network problems. Therefore, we need to use multiple SDN controller composed of distributed clusters. In order to avoid the reliability, scalability, performance issues in a single controller node.
Research Status
Literature[5] proposed a method of working with multiple distributed controllers to solve the scalability of SDN networks in view of the growing size of SDN networks and the limited performance of individual controllers. With the deepening of the research of distributed controller plane, how to synchronize the information between the controllers and make the network more consistent is the fundamental problem that the above research needs to be solved.
The main purpose of maintaining the SDN controller consistency is to ensure that the network events acquired by the host controller (or local controller) can be shared to the other controller. So that multiple controllers can agree on the view of the whole network. In the distributed control plane composed of SDN multi-controller, the relationship between the consistency and availability of the whole system is very close[6]. Strong consistency facilitates a more consistent view of the network between multiple controllers, making the upper layer application based on centralized control even better. However, this will also lead to more communication overhead and latency affecting performance at the control level and reducing its availability. However, if the system wants to get a higher availability. you need a reasonable allocation and resource mobilization of the entire control plane. So there is also a certain degree of requirements of the consistency.
At present, the consistency of SDN controller is mainly achieving through the distributed data storage system[7]. The choice of consistency agreement, data interaction and synchronization method is limited. so it is difficult to meet the upper application of diversified deployment and traffic optimization needs[8]. Literature[9] adds control algorithms to the infrastructure to enhance the consistency of the SDN control plane in order to improve the consistency of the SDN network. However this approach is contrary to the core idea of SDN. Literature[10] uses a replicated transactional database schema and a DHT (Distributed Hash Table) schema to solve the problem of consistency. In literature[11], a hierarchical strategy scheme is adopted to solve the problem of concurrency strategy consistency.
In the literature[12], an extended scheme and the consistency update algorithm of the control plane are proposed based on the idea of distributed cluster technology. The algorithm not only updates the control node according to the specific event that triggers the change of the network state. but also solves the problem that SDN centralized control architecture cannot adapt to large-scale network, poor network expansion and possible logical consistency.
The availability of the system is the key to ensuring the user experience while ensuring consistency[13]. In order to ensure the usability of the system, the literature [14] sacrifice a certain degree of consistency. so that the system should be more able to deal with the failure. The literature [15] divides the entire network topology into multiple partitions. Each partition is managed by a separate controller so that the controllers of multiple partitions share the management of the entire network topology and thus the network partitioning algorithm is designed and implemented. Improve the availability of control planes.
At present. researchers mainly focus on the SDN distributed control plane esign and implementation and the qualitative research on the consistency of different intensity is lack of further quantification and optimization. Literature[16] research the quantitative relationship of consistency, performance and usability. Based on this, the author calculate the cooperative optimization and the condition of obtaining the optimal value of the consistency of SDN multi-controller. The research has important practical application value for improving the overall performance of SDN control level. However, there is a little rough of the quantization of usability, and in the optimizing problem only a single condition is restricted rather than comprehensive optimization.
Quantification and Relationship Derivation
Consistency
The SDN controller node has local cache or communication delay. so the network events in the control area may not be shared in time to the rest controller in the system. resulting in the inconsistencies of the network views. Therefore, we use the degree of difference between the network events of the controller as a measure of consistency, the greater the degree means that the weaker system consistency.
Define the consistency of the controller node CNi as ci.
i
i E
c =∆ (1)
i
E is the number of network events on controller nodeCNi. and∆Eiis the maximum number of
network eventsEithat have been updated on the controller node but are not yet synchronized. The
larger the value ofci, the weaker the consistency of the node CNi.
The consistency of the whole system can be defined as:
n E
n c C
n i
i n
i i ∑
∑
= =
∆ =
= 1 1 (2)
n is the number of controllers in the network. IfC≤1. it means that each node has at most one
event which need to synchronize. corresponding to a strong consistency of the distributed multi-controller network.
Communication Overhead
When a controller node CNi synchronizes a network eventEi, the resulting data packet is usually
smaller. averaging about 1 KB. and no more than 4KB[17]. So the number of communication times
per unit time can be used as a measure of communication overhead[18]. The minimum cost of a single node CNi is
i i i
c h n
v = (3)
i
h is the occurrence rate of the eventEi on the nodeCNi. The formula indicates that the controller
nodeCNi can achieve the minimum communication overhead by performing a consistent
synchronization between the nodes each time the consistency limit Cireached. There are N nodes in the system. If an event occurs, the controller first sends messages to the main controller, resulting in a communication overhead. and then the main controller synchronize the information to the other controller, resulting in n-1 communication overhead. So the communication times is a total of n. The communication overhead of the whole system can be written as
∑
∑
= =
= =
n
i i i n
i i
c h n v V
1 1
(4)
Availability
In a highly consistent multi-controller network when a node or link fails resulting in the different network views between the controllers. Because the control plane cannot reach a strong consistency of the network view the control plane will no longer be able to continue to work and loss the availability. If the controller nodes are allowed to tolerate short-term failures when the consistency strength is reduced and the network events that are partially updated in the local cache are allowed.
As mentioned in the literature[19] the system availability can be defined as
MTTR MTTF
MTTF
+ .
the system fails. The MTTR indicates the point at which the system failed to complete the average time of repair and re-use. In both cases the MTTR depends on the hardware design of the system. regardless of the configuration of the consistency parameters. The stronger consistency the system is more likely to fail due to frequent communication. Therefore, the relevant research on consistency will focus on MTTF. This paper use all the number of events as a measure of quantitative units of the system for the unit unity. The MTTF value in the controller nodeCNi should be the smaller
value of the upper limit of the node consistencyCiand the number of events that occurred when a node failure occurred mhi.
{
ci mhi}
MinMTTF = , (5)
Furthermore. the availability of the entire control layer can be measured as:
{
}
∑
∑
= = = = n i i i n i mh c Min MTTF A 1 1, (6)
We have quantified the three main attributes of SDN distribution control plane. then we will study the relationship between them in order to set the appropriate parameters for the above attributes to reduce the communication overhead of the entire control layer.
Interrelationships
After we measure the consistency communication overhead. and availability of the control plane separately this paper examine the relationship between them to determine how to configure the
parameters in the system to get the optimal system. If
i i i
c e
x = ,
i i c
y = . We decide to use the
Cauchy-Schwarz inequality by some observation:
(
)(
) (
1 1)
22 2
1 2 2
1 xn y yn xy xnyn
x ++ ++ ≥ ++ (7)
2 1 ≥
∑
= n i i h C n V (8)If∀i≠ j .
j j i i y x y x
= . C is the consistency of the upper limit Cmax . get the minimum
communication overhead: =
∑
= n i i h C n MinV 1 max (9)∑
= = n i i i i h h C c 1max (10)
It can be seen that the upper bound of the consistency of each node is proportional to the square root of the network event occurrence rate. Therefore, under the given global constraints. the minimum consistency of each node can be allocated according to the rate at which each node generates network events to obtain the minimum communication overhead.
For the availability and the consistency,
{
}
≤ ≤∑
∑
∑
∑
= = = = n i i n i n i i i i i n i h m C Min h m c Min mh c Min 1 max 1 1 1 , ,If
∑
=
= n
i i i i
h h C c
1 max
. the above inequality is given an equal sign:
=
∑
= n
i i h m C Min MaxA
1
max, (12)
It can be seen that the value of consistency depends on the rate at which the node generates network events. When the relationship between the two is proportional the availability of the entire control plane is maximized.
In summary, when the consistency parameter is proportional to the rate of occurrence of the event. the whole system can produce the minimum communication overhead while maximizing the availability.
Experimental Verification
In order to test the quantization model this paper uses C language to implement an emulator to simulate the consistency between multiple controllers. The experiment is based on the Internet 2 OS3E network topology. OS3E is an all over the United States for advanced scientific research
SDN network[20]. OS3E has 34 nodes and 42 links, each node represents an independent university
or organization, usually need to deploy an SDN controller. Thus, in this emulator this article assumes that a controller is deployed on each node of the OS3E. and that a consistent interaction is required between the controllers.
For the occurrence rate of the events in each node in OS3E this paper is based on the statistical data from the Stanford University campus network[21]. This paper records the relationship between the velocity and the time of the flow. We simulate each data stream as an event. In addition, taking into account the possibility of two events on a single controller interval is too long. resulting in the previous event cannot be synchronized in time. The simulation each method will be 5 minutes every additional synchronization.
This paper default OS3E network is heterogeneous. each time the node network event update rate in the average update rate up and down 30% random value.
There are three conformance strategies implemented in the emulator:
Strong mode: Ensures that each event in the SDN network can be globally shared in a timely
manner. i. e. . C≤1. corresponding to a strong consistency system.
Weak mode: Under the premise of satisfying the consistency constraint. the weakest consistency
agreement is selected among the nodes and the consistency configuration of each node is the same. I. e. . ∀i. ci =Cmax. corresponds to a weak consistency system.
Dynamic mode: Based on the analysis results of the above quantitative model. we design a
flexible consistency agreement to coordinate the consistency of each node with the update rate of its network events.
By analyzing the simulation results of the above three strategies the advantage of the quantization model is compared with the common consistency model in SDN network. Assume that its global consistency constraint Cmax=2 (for Weak and Dynamic). and in the above experimental
environment for its simulation test.
Figure 1 chooses the time for horizontal coordinates and the communication overhead vertical coordinates. The figure shows the simulation results of the global communication overhead under this constraint. It can be seen from the simulation results that the Dynamic mode has the minimum
communication overhead in three consistency strategies. The communication overhead of Strong mode is the largest. and the trend of the three mode is roughly the same over time. It is worth
Weak mode in each architecture where the event rate is different. and Dynamic mode is more
[image:6.612.213.401.95.218.2]suitable
Figure 1. Communication overhead simulation.
for the actual network. So Dynamic mode can achieve better performance than the usual consistency
[image:6.612.214.399.258.382.2]strategy.
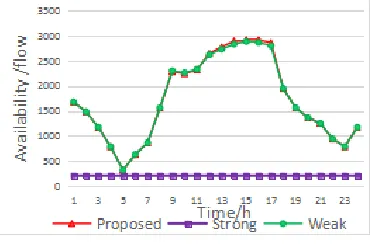
Figure 2. Availability simulation
Figure 2 chooses the time for the horizontal coordinates and the availability for the vertical coordinates. The figure shows the comparison of the availability of the three modes. Since the rate of network events generated by each node is very fast in order not to exceed the upper limit of the local consistency constraint after the fault the fault repair time m is 0. 01s. Strong mode has a
consistency factor of 1. its availability is much lower than the other two modes. It can be seen that the availability of Dynamic mode and Weak mode is approximately equal. and the availability of Weak mode is higher in the 12 to 18-point range.
Conclusion
This paper mainly discusses the consistency of SDN control plane. Firstly, we have related work and research about some introduction for SDN control plane distributed system. Then based on the characteristics of SDN. we quantize consistency communication overhead and availability. a quantitative analysis and establish a model. Then we study the relationship between them and we obtain the relationship which provides guidance for the configuration of consistency parameters between them. Finally, the consistency method based on the above quantitative model is compared with the traditional consistency method. The experimental results show that the method can effectively improve the performance and usability of the control level. In the future work, we will further refine the numerical relationship between them to find a better solution. At the same time, in order to run the algorithm better we will collect the data of the distributed system for more days to process. Then, we will calculate the average event rate for the algorithm to use and be more scientific determine the value of C or other parameters. At the same time, we will test its effect in the SDN simulation environment so that the algorithm has been more widely used.
Acknowledgement
Grant 61571021 and 61671029, the Science and Technology Development Project of Beijing Municipal Education Commission under Grant KM201610005007.
References
[1]Zong ZF, Wu S, Core network architecture for future mobile communications[J], ZTE
Technology Journal, 2016, 03:56-58.
[2]Open Networking Foundation, Software-defined networking: The new norm for
networks[EB/OL], 2015, https://www. opennetworking. org.
[3]Handigol N, Seetharaman S, Flajslik M, et al. Plugin-serve: load-balancing Web traffic using OpenFlow[J]. ACM SIGCOMM Demo, 2009, 4(5): 6.
[4]Li H, Li P, Guo S, et al. Byzantine-resilient secure software-defined networks with multiple controllers in cloud[J]. IEEE Transactions on Cloud Computing, 2014, 2(4): 436-447.
[5]Dixit A, Hao F, Mukherjee S, et al. Towards an elastic distributed SDN controller[C]//ACM SIGCOMM Computer Communication Review, 2013, 43(4): 7-12.
[6]Fox A, Brewer. E. A, Harvest, Yield and Scalable Tolerant Systems[C]//Proc. 7th Workshop Hot
Topics in Operating Systems (HotOS 99), IEEE CS, 1999:174-178.
[7]Koponen T, Casado M, Gude N, et al. Onix: a distributed control platform for large-scale production networks[C]//OSDI. c2010: 1-6.
[8]Levin D, Wundsam A, Heller B, et al. Logically centralized: state distribution trade-offs in software defined networks[C]//The First Workshop on Hot Topics in Software Defined Networks. ACM, c2012: 1-6.
[9]Yu M, Rexford J, Freedman MJ, et al, Scalable flow-based networking with DIFANE[J], ACM
SIGCOMM 2010 Conference, 2010,41(4):351-362.
[10] Koponen T, Casado M, Gude N, et al, Onix:a distributed control platform for large-scale production networks[C], Usenix Symposium on Operating Systems Design & Implementation, Vancouver, Canada, 2010: 351-364.
[11]Ferguson AD, Guha A, Chen L , Hierarchical policies for software defined networks[C], Workshop on Hot Topics in Software Defined Networks, Helsinki, Finland, 2012:37-42.
[12]Chen SQ, Research of Consistency Mechanism based on Multi-Controllers in Software-defined
Network[D], Beijing:Beijing Institute of Technology, 2016.
[13]Liu L, Zhou JT, Review for Research of Control Plane in Software-Defined Network[J], COMPU -TER SCIENCE, 2017, 2, 44(2):75-81.
[14]Tian XN, Design and Implementation of Multiple SDN Controllers via Zookeeper[D], Gansu:
University of Lanzhou, 2016.
[15]Li Z, Research on Availability and reliability of SDN Control Plane[D], Beijing: Beijing University of Technology, 2015.
[16]Li JF, Lan JL, Hu YX, et al. Quantitative approach of multi-controller’s consensus in SDN[J], Journal on Communications , 2016, 6, 37(6):86-93.
[17]Botelho F, Ramos V, Manuel F, et al. On the feasibility of a consistent and fault-tolerant data store for SDNs[C]. Software Defined Networks (EWSDN), 2013 Second European Workshop. IEEE, c2013: 38-43
Device-to-Device Communications[J], IEEE Transactions on Vehicular Technology, 2016, 65(11):9319-9329.
[19]Chen W, Quantitative Analysis Method in High Availability System Design[D], Zhejiang: Zhejiang University
[20]Internet2 open science, scholarship and services exchange[EB/OL]. http://www. internet2. edu/network/ose/.
[21]Shalimov A, Zuikov D, Zimarina D, et al. Advanced study of SDN/OpenFlow