2017 International Conference on Computer, Electronics and Communication Engineering (CECE 2017) ISBN: 978-1-60595-476-9
Research on the Robot Wrist Sensor Dynamic Characteristics Based on
Improved Genetic Wavelet Neural Networks
A-long YU, Jin-qiao DAI and Hua-jun SUN
School of Physics and Electronic Electrical Engineering, Huaiyin Normal University, Huaian, Jiangsu 223300, PR China
Keywords: Robot wrist force sensor, Dynamic characteristics, Dynamic modeling, Dynamic compensation wavelet neural networks, Genetic algorithm.
Abstract. The multi-dimensional wrist force sensor applied to Motomam V3X robot is introduced. The characteristics of genetic algorithm (GA) and artificial neural networks (ANN) are compared. A novel improved genetic algorithm (IGA) is proposed to train wavelet neural networks (WNN). A kind of new dynamic modeling and dynamic compensation methods are presented based on improved genetic algorithm and wavelet neural networks (IGAWNN) and the principle of algorithm is introduced for the multi-dimensional wrist force sensor. The dynamic model and dynamic compensation model of the robot wrist force sensor are set up according to data of the dynamic calibration, where the structure and parameters of wavelet neural networks of the dynamic model and dynamic compensation are optimized by the improved genetic algorithm. The results show that the proposed methods can overcome the shortcomings of easy convergence to the local minimum points of BP algorithm, and the network complexity, the convergence and the generalization ability are well compromised and the training speed and precision of the new dynamic modeling and dynamic compensation are increased.
Introduction
Robot wrist force sensor is a force sensor which both ends are respectively connected with the robot wrist and gripper. When the robot clips the workpiece operating, it can measure the contact force of robot and the external environment, namely through the wrist force sensor can output 6 dimensional force (3 axis force component and the 3 dimensional moment component) and feedback to the robot control system to control or regulate the movement of the manipulator and complete the required work. Therefore, the wrist force sensor is one of the most important robot sensors. The sensor usually consists of two parts the sensor head and signal processing. The sensing head is composed of elastic body, measuring bridge and preamplifier. The signal processing part includes amplifier, filter, signal sampling, A/D conversion and computer. The system structure is different for different applications.
With the development of the robot measurement and control technique, the performance to wrist force sensor brings up more and more high request: adopting measurement and control not only have the good static state characteristic, but also should have the good dynamic characteristic. Now, the construction of the wrist force sensors makes its natural frequency and the damping ratio low. So the dynamic characteristic is difficult to meet some situation of measurement and control. The research on the dynamic characteristic of wrist force sensor is necessary. The research on the dynamic model and dynamic compensation of the wrist force sensor is important method on the dynamic characteristic research of robot wrist force sensor.[1-4].
Artificial neural network (ANN) has been widely applied in science and engineering [3-5]. The majorities of these applications are the gradient technique and back propagation (BP) for optimizing the networks. BP has unquestionably been a major technique, but it is plagued with long practicing and unpredictable performance [6-17].
Recently, wavelet neural networks (WNN) have become a popular tool for functional approximation. Wavelet neural networks, which basis functions are orthonormal scaling functions, are more suitable in approximating to function [11-19].
Genetic algorithm (GA) based on natural selection and genetic mechanism is a global search that grabbles from one population of points to another. As the algorithm continuously samples the parameter space, the search is directed toward the area of the best solution. So it can be used to train WNN [12-21].
In this paper, a novel improved genetic algorithm (IGA) is proposed to train wavelet neural networks(WNN). In this method, the dynamic model and dynamic compensation of the robot wrist force sensor can be set up according to measurement data of the dynamic calibration, where the structure and parameters of WNN of the dynamic model and dynamic compensation are optimized by GA. The results show that the proposed is effective.
A New Mechanical Structure of the Force Wrist Sensor
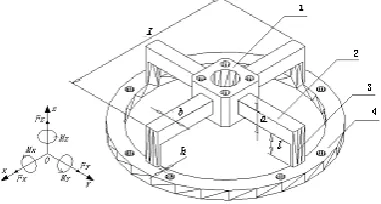
Figure 1-2 depicts the new mechanical structure and appearance of wrist force sensor. Its elastic body consists of center support of the elastic body, cross elastic beam, compliant beams and the base of the elastic body. Where the cross elastic beam is composed of four symmetric horizontal beams. And four vertical compliant beams connect the four corresponding horizontal beams to the base, respectively.
[image:2.595.199.390.431.533.2]The whole elastic body is designed to be monolithic and symmetric. And the mechanical structure of the wrist force sensor is light and simple.
Figure 1. Mechanical structure of wrist force sensor.
1. Center support of the elastic body, 2. Cross elastic beam, 3. Compliant beam, 4. Base of the elastic body
Figure 2. Appearance of wrist force sensor.
Genetic Wavelet Neural Networks
Wavelet Neural Networks
Let (t)∈L2(R) be the mother wavelet that satisfies the admissibility condition, i.e.
2 ^
( )
R d
where ()
is the Fourier transform of (t). The corresponding wavelet basis function are defined by
1 2
, ( ) ( )
a b
t b
t a
a
where a and b are the dilation and translation parameters respectively[10-16].
The structure of WNN is similar to that of multi-layer perceptron, except that here the activation function of hidden nodes is replaced by a wavelet function.
The outstanding characteristic of the wavelet transform is that wavelet transform has good
localization in both time and frequency space. The width of the time-window of (t) can be changed with the variation of the frequency. This property is very useful for the analysis of non-stationary signals and the learning of the nonlinear function.
According to the theory of multi-resolution analysis, an orthogonal wavelet basis can be constructed. The orthonormal wavelet basis function neural networks can be defined by using the orthonormal bases. The advantage of this network is that the computational expense is greatly reduced.
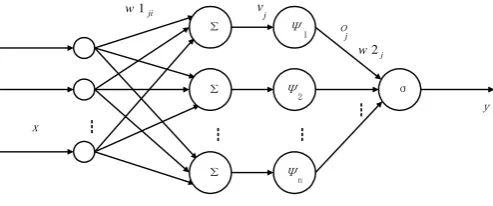
[image:3.595.165.412.523.626.2]The structure of WNN is depicted in Figure 3.And X is the input vector, (t) is the mother wavelet function is the weight matrix, σ is activation function and y is the output vector of the network.
Figure 3. Structure of wavelet neural networks.
Based on the previous discussion, WNN can be defined as follows:
0 0
( ) 2 (( 1 ) / )
n m
j ji i j j
j i
y t w w x b a
(3)Optimizing Wavelet Neural Networks by Improved Genetic Algorithm
Genetic algorithm combines Darwinian’s survival of the fittest and the crossover operation and accelerates the optimizing speed and capability. It starts with the initial population by randomly
┇
x
┇ ┇
┇ Σ
Σ
Σ
Ψ
1
Ψ
2
Ψ
n
y
σ
v
j
o
j w1ji
choosing, and each answer is expressed as a string. These candidates go along for better answer by the combination of strings. The general GA is composed of reproduction, crossover and mutation, which simulate propagating, mating and gene mutation of natural selecting and inheritance course. The description of details of the improved genetic algorithm is as follows:
(1) Encoding
In order to represent WNN structure in one chromosome, the chromosome is divided into connection genes and parameter genes. Connection genes are of binary type and indicate whether the nod exists, a "1" denotes an existed node and a "0"denotes no node exits. Weight, dilation and translation genes are real-valued and indicate the actual connection weight, dilation and translation factors.
(2) Fitness function
Selection of fitness function is very important because of its direct relation to GAWNN convergence rate. Usually the fitness function is translated from the objective function. Based on these considerations the fitness function is defined as follows:
1 1 1 2 1 1 ( ( ) ( )) 2 m i
F E y i y i
(4)(3) Crossover and Mutation
The crossover and mutation formula can be described as:
avg c avg c c c avg c avg c c c F F F F P P F F F F A P P P max min max min ]] 1 ) ( 2 [ exp[ 1 c avg m avg m m m avg m avg m m m m F F F F P P F F F F A P P P max min max min ]] 1 ) ( 2 [ exp[ 1 (4) Selection
Selection operation is a process of generating new population through choosing and reproducing better individual from the old generation. Fine individuals have high selection probability which have more chance to be reproduced. The fine genes can be handed down generation by generation. Normal selection methods include roulette wheel ranking selection elitist selection, league matches, etc.. The selection function is defined as follows:
K i i i i F KF N 1 IGA-based WNN for Wrist Force Sensor Dynamic Modeling
Mechanism OF GA-Based WNN for Wrist Force Sensor Dynamic Modeling
(1) According to the performance of the sensor, determine the desired performance of it.
(2) According to measurement data of the dynamic calibration, apply GA to train WNN until the result of the output meet the demand of the evaluating function.
(3) Link the WNN to the wrist force sensor to realize its dynamic modeling.
Figure 4 shows the framework of dynamic modeling of the wrist force sensor, in which y(k) is the sensor output and u(k) is the sensor input. The determination of the structure and parameters can be achieved by using GA.
wavelet neural networks
WNN model
_
┇
delay unit y(k)
B
y(k)
y'(k)
+
e(t)
u(k)
┇
GA
[image:5.595.174.422.177.322.2]delay unit
Figure 4. The framework of the dynamic modeling of the wrist force sensor.
Robot Wrist Force Sensor Dynamic Modeling
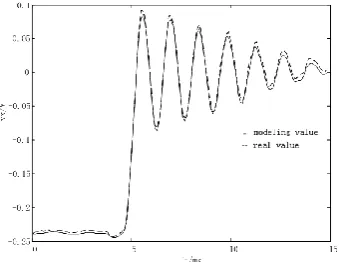
In experimental the training data is step response of the wrist force sensor. The Mexica hat wavelet function is selected as hidden neuron’s transform function of WNN. When the iterations evolution is 45 the error function is 0.001.The step response results are shown in Figure 5-7 in the “x” axis
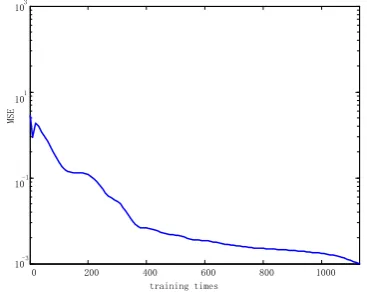
force Fx, “y” axis Fy and “z” axis Fz. The results indicate that the dynamic modeling is precision. However, when the t training times is 1000 the error function is 0.001 by using BP algorithm. The curve of training in BP-Based WNN is showed in Fig.8 in “x” axis force direction. These results
[image:5.595.217.387.477.608.2]show that the training speed and precision of model are increased by using GAWNN than BPWNN.
[image:5.595.214.381.639.770.2]Figure 5. Step response model of sensor in “x” axis force direction.
Figure 7. Step response model of sensor in “z” axis force direction.
0 200 400 600 800 1000
10-3 10-1 101 103
training times
MS
E
Figure 8. Curve of training by using BPWNN in “x” axis force direction.
Dynamic Compensation Principle of Robot Wrist Force Sensor
From the dynamic model of the robot wrist force sensor can be seen, its inherent frequency is not high, the damping ratio is very small, which is decided by the inherent characteristics of the elastic body structure by itself. In order to improve the speed of dynamic response, to accurately reproduce the measured signal, the dynamic characteristics of the sensor’s compensation are needed.
To improve dynamic performance of the sensor generally has two ways, one is to change the structure and parameters of the sensor, but it involves both the static performance, and by the process and material constraints. Two is the dynamic compensation which the method is more flexible. Especially the development of a variety of programmable chip (microprocessor, complex programmable logic device (CPLD) and field programmable gate array (FPGA) etc.) provides favorable conditions for its application. The dynamic compensation of robot wrist force sensor is mainly based on the principle of the basic link as shown in Figure 8. Taking The robot wrist sensor
measured signal u(k) into y(k). By cascade of dynamic compensation link which u(k)is the output signal. After compensation, u(k) should be as close to the u(k).
sensor
u(k) y(k) compensation u′(k)
network
Figure 9. Dynamic compensation principle of sensors.
As shown in Figure 1, the input-output behavior of the sensor is described as:
[image:6.595.204.388.241.387.2]A(q-1)=1+a1q-1+……+anq-n B(q-1)=b1q-1+…+bnq-n
{u(t)},{y(t)} are the input and output of the sensor respectively, ai, bi(i=1,2,…n) are constant parameters of the sensor model.n is the order of the sensor. q-1 represents the unit delay operator. In order to correct dynamic measurement error of the sensor, a compensation segment is connected in cascad with output y(t).Assume the input-output behavior of the compensation network is:
In which
C(q-1)=1+c1q-1+…+cmq-m D(q-1)=d1q-1+…+dmq-m
cj, dj(j=1,2…m) are the unknown parameters is the order of the compensation segment. So the performance of the sensor after compensation becomes:
1 1
'
1 1
( ) ( )
( ) ( )
( ) ( )
B q D q
u t u t
A q C q
It can be seen that polynomials A(q-1) and B(q-1) are fixed and C(q-1),D(q-1) are changeable. By selecting proper C(q-1) and D(q-1),the sensor can acquire the desired dynamic performance u′(t).
IGA-Based WNN for Robot Wrist Force Sensor Dynamic Compensation
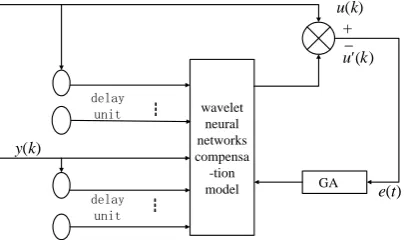
Figure 10 shows the framework of dynamic compensation of the wrist force sensor, in which y(k) is
the sensor output and u(k) is the sensor input and u'(k) is the desired output of the sensor. The determination of the structure and parameters can be achieved by using IGA.
wavelet neural networks compensa -tion model
_
┇
delay unit
u(k)
B
u(k)u'(k)
+
e(t)
y(k)
┇
GA
[image:7.595.197.400.418.538.2]delay unit
Figure 10. The framework of the dynamic compensation of the wrist force sensor.
From above analysis, the process of applying GA-Based WNN to the dynamic compensation of wrist force sensor can be summarized as follows:
(1) According to the performance of the sensor, determine the desired performance of it.
(2) According to measurement data of the dynamic calibration, apply GA to train WNN until the result of the output meet the demand of the evaluating function.
(3) Link the WNN to the wrist force sensor to realize its dynamic compensation.
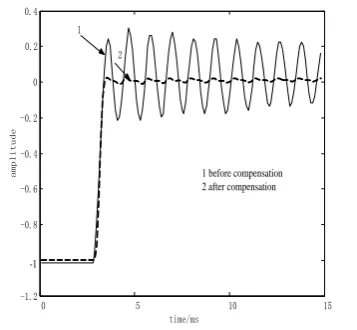
training speed and precision of compensation model are increased by using IGAWNN than BPWNN.
0 5 10 15
-1.2 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4
time/ms 1
2
1 before compensation 2 after compensation
am
p
li
tu
d
e
[image:8.595.201.384.108.246.2]-1
Figure 11. Step response of sensor before and after compensation in “x” axis force direction.
0 5 10 15
-1.2 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6
time/ms 1
2
am
p
li
tu
d
e
1 before compensation 2 after compensation
[image:8.595.224.416.312.456.2]-1
Figure 12. Step response of sensor before and after compensation in “y” axis force direction.
0 5 10 15
-1.2 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4
time/ms
a
m
p
l
i
t
u
d
e
1 2
-1
1 before compensation 2 after compensation
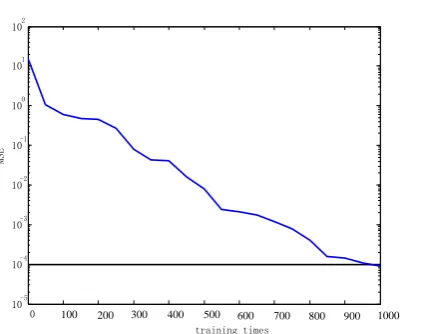
[image:8.595.200.379.510.675.2]0 10-5 10-4 10-3 10-2 10-1 100 101 102
training times
MS
E
[image:9.595.199.410.71.238.2]1000 900 800 100 200 300 400 500 600 700
Figure 14. Curve of training by using BPWNN in “x” axis force direction.
Conclusions
According to above analysis, IGAWNN possesses the ability of dynamic mapping. IGA not only optimizes the parameters of wavelet neural networks of the dynamic model and dynamic compensation, but also optimizes its network structure. Compared with other methods, the proposed method has better precision and performance. From the experimental results, we learn the Research methods of the robot wrist sensor dynamic characteristics based on improved genetic wavelet neural networks is effective.
Acknowledgment
The research work was supported by Scientific Research Significant Projects of Universities and Colleges in Jiangsu Province No16KJA460003
References
[1] Song Aiguo, Wu Jun, Qin Gang, “A novel self-decoupled four degree-of-freedom wrist force/torque sensor,” Measurement. vol. 40(3), pp. 883-891, 2007.
[2] Yin Ming, Xu Kejun, Dai Xianzhong, “FLANN Based Dynamic Characteristic Investigations of Sensor,” Journal of Southeast University. vol. 29(4), pp. 103-108, 1999.
[3] “Xu Kejun, Yin Ming, “A dynamic compensating method based on FLANN for wrist force sensor,” Chinese Journal of Scientific Instrument. vol. 20(5), pp. 511- 514, 1999.
[4] Yu Dongchuan, “Analysis and calibration for dynamic characteristic of the pressure sensor,” China Instrumentation. vol. 18(3), pp.9-11, 2003.
[5] Cai Hainan, Zhou Zhaoying, Li Yong, et al, “A study on software compensation method of accelerometerps dynamic characteristics,” Chinese Journal of Scientific Instrument. vol. 19(2), pp. 263 -267, 1998.
[6] Chen Junjie, Lu Jun, Huang Weiyi, “Non-linearity rectification of sensor systems based on genetic neural network,” Chinese Journal of Scientific Instrument. vol., 24(2), pp. 201-204, 2003.
[7] Prtra J.C., Pal R.N., “A functional link artificial neural network for adaptive channel equalization,” Signal Processing. vol. 43(2), pp. 18-1 195, 1995.
[9] Prtra J.C., Panda G., Baliarsingh R., “Artificial neural network base d non-linearity estimation of pressure sensors,” IEEE Trans Instru Meas. vol., 63(6), pp. 874-881, 1994.
[10]Zhong Ying, Wang Bingwen, “BP network sequence prediction based on genetic algorithm’” Systems Engineering and Electronics. vol. 24(8), pp. 9- 11, 2002.
[11] Li Wei, He Pengju, Yang Heng, Chen Ming, “Improved algorithm based on rough set and BP neural network algorithm,” Journal of Northwestern Polytechnical University. vol. 30(40), pp. 602-604, 2012.
[12]Zhang Jing, Xue Leng, Rong Hui, Wang Jianping, Fu Xiaodong, “Research of Data Fusion Technology Based on WSN of GA Optimizing BPNeural Network,” Journal of Shanxi University (natural science Edition). vol. 38 (2), 185-188, 2015.
[13]Kuang Hang-Yu, Jin Jing, Su Yong, “Adaptive genetic algorithm for improvement of crossover and mutation,” Computer engineering and applications. vol. 52 (12), pp. 95-97, 2016.
[14]Yu Along, “Numeral eddy current sensormodelling based on genetic neural network,” Chinese Physics B. vol. 17(3)pp. 878-882, 2008.
[15] Liu Qing, “Linearization of sensorps non-linearity by using genetic algorithm and neural network,” Journal of Nanjing Normal University. Vol. 2(8), pp. 11-15, 2002.
[16]Blanco A., Delgado M., Pegalajar M.C., “A Genetic Algorithm to Obtain the Optimal Recurrent Neural Network,” International Journal of Approximate Reasoning. vol. 23(5), pp. 67-83, 2000.
[17]Maniezzo V., “Genetic Evolution of the Topology and Weight Distribution of Neural Networks,” IEEE Trans on Neural Network. vol. 5(1), pp. 39-53, 1994.
[18]Donoho D.L., Johnstone I.M., “Adapting to unknown smoothness via wavelet shrinkage,” Journal of the American Statistical Association. vol. 90(9), pp. 1200-1224, 1995.
[19]X.-G. Xia, “A new prefilter design for discrete multi-wavelet transforms,” IEEE Trans Signal Processing. vol. 46(5), pp. 1558-1570, 1998.
[20]Bui Tien D., Chen Guangyi, “Translation-invariant denoising using multiwavelet,” IEEE Transactions on Signal Processing. 46(8), pp. 3414- 3420, 1998.