International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)192
The Motor Cycle and Rider-Modeling and Analysis of the
Control System
Raghupati Goswami
1, Dr. Sourish Sanyal
2, Prof. Amar Nath Sanyal
3 1Chairman of the Trust Ideal Institute of Engineering, Kalyani Shilpanchal, Kalyani, Nadia, West Bengal, India
2Dept. of Electronics & Communication Engg. College of Engineering & Management, Kolaghat Purba Midnapur,
West Bengal, India
3
Professor of Electrical Engg. Academy of Technology Adisaptagram, Hooghly, West Bengal, India
Abstract −A motorcycle and a rider may be modeled as an automatic control system. The eyes of the rider act as the sensor to gather information about the world map around him. This information is carried by the sensory nerves to the brain acting as the central processing unit. The signal is processed here and fed back to the hands and legs which exercise the steering, starting, braking and other control functions. In this paper, a motor cycle and a rider combination has been mathematically modeled. The experience of the rider has been taken into consideration by inserting a zero of variable location in the transfer function. The system gain has been adjusted with reference to the root locus to get acceptably good performance in steering control. Both time-domain and frequency-domain analysis have been made using MATLAB7.1 and the results have been displayed.
Keywords − Motorcycle, Rider, Modeling, Control system, Stability margin.
I. INTRODUCTION
A motorcycle is a single-track, engine-powered, two-wheeled motor vehicle. Their designs vary considerably depending on the task they have to perform e.g. long distance travel, navigating in congested urban traffic, cruising, sport and racing, or off-road conditions. These are the most affordable forms of motorized transport in many parts of the world particularly in developing countries like China and India. With some exceptions, modern motorcycles has standardized on a steel or aluminum frame, telescopic forks holding the front wheel, and disc brakes. Some other body parts may be added for either aesthetic or some other desired performance. It has a petrol powered engine typically consisting of one to four cylinders coupled to a manual five- or six-speed sequential transmission drives having swingarm-mounted rear wheel connected by a chain, driveshaft or belt. [6,7].
II. THE DYNAMICS OF MOTORCYCLE
Different types of motorcycles have different dynamics which influences their performance in given condition. A longer wheelbase provides the feeling of more stability by responding less to disturbances. The tyres have a large influence over handling a motorcycle.
Motorcycles must be leaned in order to make turns. This is induced by counter-steering, in which the rider steers the handlebars in the direction opposite of the desired turn. Because it is counter-intuitive this practice is often very confusing to novices—and even to many experienced motorcyclists.
Short wheelbase motorcycles, such as sport bikes, can generate enough torque at the rear wheel, and enough stopping force at the front wheel, to lift the opposite wheel off the road [5].
III. SAFETY AND TRAINING
Motorcycles have a higher rate of fatal accidents than automobiles, about four times higher than for cars. The two major causes of motorcycle accidents: motorists pulling out or turning in front of motorcyclists and violating their rights-of-way and motorcyclists running wide through turns. Motorcyclists can anticipate and avoid some of these crashes with proper training, increasing their conspicuousness to other traffic. There are several organizations dedicated to improving motorcycle safety by providing advanced rider training. This increases personal safety as well as reduces the insurance costs. The training improves the visual sensing and the anticipation factor. This is taken into consideration while modelling the motorcycle and the rider [9][10].
IV. RIDING POSTURES
The motorcyclist's riding position depends on rider body-geometry (anthropometry) combined with the geometry of the motorcycle itself [8][10]. These factors create a set of three basic postures-
a. Sport: The rider leans forwards into the wind and the weight of the upper torso is supported by air pressure as long as the motorcycle is travelling at speed, typically above 50 mph (80 km/h). The footpegs are below the rider or to the rear. The reduced frontal area cuts wind resistance and allow higher speeds.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012)193
The standard posture is straightforward and is usedfor touring and commuting. It is good for the beginner or the novice who are as yet unable to anticipate the changes in environment.
c. Cruiser: The rider sits at a lower seat height with the upper torso upright or leaning slightly rearwards. Legs are extended forwards, sometimes out of reach of the regular controls on cruiser pegs. The low seat height is good for new or short riders. Handlebars tend to be high, and wide. The emphasis is on comfort. But there is greater likelihood of scraping foot pegs, floor boards, or other parts if turns are taken at a relatively high speed.
Factors of a motorcycle's ergonomic geometry that determine the seating posture include the height, angle and location of foot pegs, seat and handlebars. Factors in a rider's physical geometry that contribute to seating posture include torso, arm, thigh and leg length, and overall rider height.
The modeling also depends on the position and posture. In this work, modeling has been made only for the standard.
V. MODELLING OF THE MOTOR CYCLE AND RIDER
The motor cycle and rider problem is, in essence, a closed loop system. The eyes (and ears) of the rider act like sensors and the control is excercised by his hands (steering) and legs (starting/braking). The communication link is through the sensory nerves, the brain and the motor nerves. Therefore, the human element is an element in the forward path which has to be modeled [1][3][4].
From the principles of physiology [14], the human transfer function of the rider may be given as:
(
)
( )
(
0.1)(
10)
K s
A
GH s
s
s
(1)Where,
K = forward path gain; A = Anticipation factor. Considering inertia and damping only, the transfer function of the motor-cycle may be given as:
( )
1
(
1)
GM s
s s
[image:2.595.329.537.602.745.2]
(2) The block diagram of the system is given in fig. 1.Fig 1 Motorcycle and rider problem: block diagram.
VI. THE LINE OF APPROACH TO SOLUTION
We shall consider the control problem in three phases [2]. A new rider is unable to anticipate the changes in his environment. So the anticipation factor: A = 0 while the rider is new i.e. the zero may be neglected. After gaining full experience, he is capable of anticipating the environmental changes. So the anticipation factor may be taken as: A= 1. While he is half-experienced, the anticipation factor may be taken as 0.5.
A.The new rider problem
The closed loop T.F. of the new rider and the motor cycle is given as:
( )
(
0.1)(
1)(
10)
K
M s
s
s
s
(3) The characteristic equation for this transfer function is given as:s3 + 11.1 s2 +11.1 s +1 + K = 0 (4) The allowable range of gain K is being found out by Routh’s array given below:
3 2
1 0
1
11.1
11.1
1
11.1 (1
)
11.1
1
s
s
K
K
s
s
K
From this array we conclude that:
-1 ≤ K ≤ 122.21 and it is the stable range for K.
a. Time domain analysis
The time-domain and frequency-domain analysis is being made by using MATLAB [11][12][13]. It is desired that the response of the composite system to step input be slightly underdamped. The gain is fixed up at: K = 3.3, with reference to the root locus given in fig. 2.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012) [image:3.595.59.274.185.447.2] [image:3.595.315.537.229.404.2]194
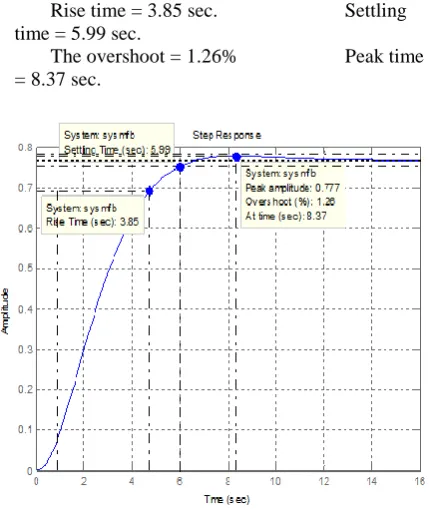
The corresponding t-domain response is given in fig. 3.We obtain the following information from t-domain analysis:
Rise time = 3.85 sec. Settling time = 5.99 sec.
The overshoot = 1.26% Peak time = 8.37 sec.
Fig 3 t-domain response for the inexperienced rider The results are satisfactory. Now we shall find out the stability margin by using Bode plot. The Bode plot is given in fig. 4.
Fig 4 Bode plot for the inexperienced rider
It reveals that the phase crossover occurs at 3.33 r/s and the gain margin is 31.4 db. The gain crossover occurs at 0.3 r/s and the phase margin is 90.1 o. These are acceptably good margins.
B.The half-experienced rider
For the half-experienced rider we shall take the anticipation factor as A = 0.5. Now the transfer function is given as:
(
0.5)
( )
(
0.1)(
1)(
10)
K s
M s
s s
s
s
(5)The characteristic equation is given as:
s4 + 11.1 s3 + 11.1 s2 + (1 + K) s +0.5 K = 0 (6)
The allowable range of gain K is being found out by Routh’s array:
4
3
2
2 1
0
1
11.1
0.5
11.1
1
122.21
0.5
11.1
122.21 59.605
122.21
0.5
s
K
s
K
K
s
K
K
K
s
K
s
K
From the array we get that for stable operation: 0< K <
61.59. Now the appropriate value of gain has to be found
out.
i. The time domain analysis
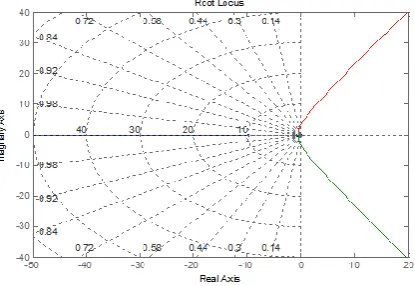
This time for getting the desired response the forward path gain has been fixed up at: K= 0.08 with reference to the root locus given in fig. 5
Fig 5 Root locus of the half-experienced rider
[image:3.595.59.271.509.662.2] [image:3.595.325.539.523.687.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012) [image:4.595.57.269.141.311.2]195
Fig 6 t-domain response for the half Experienced riderWe obtain the following information from t-domain analysis:
Rise time = 40 sec. Settling time = 60.9 sec.
The overshoot = 1.1% Peak time = 85.5 sec.
In this case, the gain chosen for the composite system is much smaller to keep the overshoot within specified limit, but the rise time, settling time and peak time have considerably increased. It indicates that the control excercised has become slower.
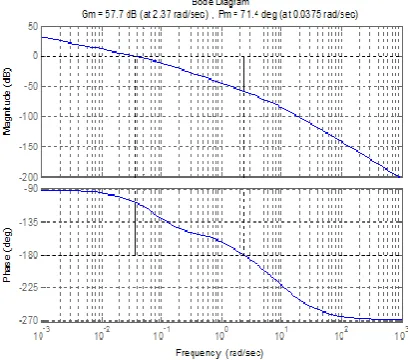
[image:4.595.62.267.552.732.2]The Bode plot is given in fig. 7. From this plot, we find that the phase crossover occurs at 2.37 r/s and the corresponding gain margin is 57.4 db. The gain crossover occurs at 0.0375 r/s and the phase margin is 71.4o. The phase margin has slightly reduced but the gain margin has much improved.
Fig 7 Bode plot for the half-experience rider
VII. THE EXPERIENCED RIDER
For the fully experienced rider, we shall take the anticipation factor as: A = 1. The closed loop transfer function for this system reduces to:
( )
(
0.1)(
10)
K
M s
s s
s
(7)The characteristic equation is given as: s3 + 10.1 s2 + s + K = 0 (8)
The allowable range of gain K is being found out by Routh’s array:
3
2
1
0
1
1
10.1
1
10.1
s
s
K
K
s
s
K
From the array we get that for stable operation: 0 < K
< 10.1 .
A.The time domain analysis
This time for getting the desired response the forward path gain has been fixed up at: K= 0.08 with reference to the root locus given in fig. 8. The time domain analysis has been made by MATLAB and the results are given in fig.9. Following information are obtained from the t-domain response:
Rise time = 38.3 sec. Settling time = 58 sec.
% overshoot = 1.81 Peak time = 80.9 sec
[image:4.595.326.536.572.740.2]It is observed that the changes that have occurred from half experience to full experience are negligibly small.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 10, October 2012) [image:5.595.59.269.377.566.2]196
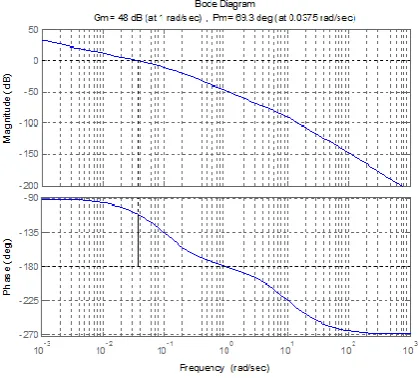
Fig 9 t-domain response for the experienced riderFig 10 Bode plot for the experienced rider
The Bode plot for the experienced rider is given in fig. 10. It reveals that the phase crossover occurs at 1 r/s and the gain margin is 48 db. The gain crossover occurs at 0.0375 r/s and the phase margin is 69.3o. The stability margins are almost same as for the half-experienced rider.
VIII. CONCLUSION
A standard motor-cycle and a rider have been modeled in this paper. The motor-cyclist has been modeled from the principle of physiology and the motorcycle has been mdelled from the principle of mechanics. The composite model has been treated as unity feedback system. The rider starts as a novice and he gradually gains experience.
While a novice, he is unable to anticipate the dynamical features around him in his world map. Hence the anticipation factor A (included as a zero) has been omitted. While he becomes fully experienced, the anticipation factor becomes one. While half-experienced it is only 0.5. The tree different cases have been treated separately. The value of forward path gain for stable operation has been found out by Routh’s array and the appropriate value of the gain in this stable range has been identified from the root locus. The analysis has been made both in the time domain and in the frequency domain. Some interesting observations have been made. While the rider is novice, the gain required is more but the rise, peak and settling times are small. But while he gains experience, the gain required is much smaller. However, the rise, peak and settling times are much larger. The difference in the performance variables are not much different for the half and the full-experienced. Hence, with gaining experience, the control is much leisurely made. The system gain for the steering control has to be adjusted with growth in experience so that every time a slightly damped response is obtained. The stability margins in each case are quite satisfactory. There is little chance of instability if the gain is properly adjusted to get a robust design.
REFERENCES
[1 ] M. Gopal, Modern control system theory, 2nd Ed., New Age
International
[2 ] S.M. Shinners, Modern control system theory and design, John Wiley and Sons.
[3 ] A.N. Sanyal and S. Sanyal, A generalized overview of control systems, Conf. Proc. of Modern Trends in Instrumentation and Control (MTIC10), CIEM, Kolkata, March 11-12, 2010. [4 ] Patranabis, Sensors and Transducers, PHI, 2008.
[5 ] Cossalter, Vittore (2006), Motorcycle Dynamics, Lulu. ISBN 978-1-4303-0861-4.
[6 ] Setright, L.J.K. (1979), The Guinness book of motorcycling facts and feats, Guinness Superlatives. pp. 8–18. ISBN 978-0-85112-200-7.
[7 ] de Cet, Mirco (2002), The illustrated directory of motorcycles, MotorBooks/MBI Publishing Company. p. 128. ISBN 978-0-7603-1417-3.
[8 ] Gaetano, Cocco (2004). Motorcycle Design and Technology, Minneapolis: MotorBooks/MBI Publishing Company. pp. 34– 35. ISBN 978-0-7603-1990-1.
[9 ] Motorcycle Safety Foundation, A Three Dimensional Analysis of Riding Posture in Three Different Styles of Motorcycle (PDF), March 2006.
[10 ]Maher, Kevin; Greisler, Ben (1998), Chilton's Motorcycle Handbook, Haynes North America, pp. 2.2–2.18, ISBN 0-8019-9099-8
[11 ]A.J. Grace, N. Laub, J.N. Little and C. Thomson, Control system tool box for use with MATLAB, User Guide, Mathworks, 1990. [12 ]Rudra Pratap, Getting started with MATLAB&, Oxfor Indian Ed, [13 ]J.J. D’Azzo , C.H. Houpis and S.N. Sheldon, Linear control system analysis and design with MATLAB, 5e, Marcel Dekker Inc. New York, BASEL