Contents lists available at
ScienceDirect
Journal of Computational and Applied
Mathematics
journal homepage:
www.elsevier.com/locate/cam
The operational matrices of Bernstein polynomials for solving the
parabolic equation subject to specification of the mass
S.A. Yousefi
a
, M. Behroozifar
b
, Mehdi Dehghan
c
,
∗
aDepartment of Mathematics, Shahid Beheshti University, G.C., Tehran, Iran bFaculty of Basic Sciences, Babol University of Technology, Babol, Mazandaran, IrancDepartment of Applied Mathematics, Faculty of Mathematics and Computer Sciences, Amirkabir University of Technology, No. 424 Hafez Avenue, Tehran, Iran
a r t i c l e
i n f o
Article history:
Received 19 November 2009
Received in revised form 17 March 2011
Keywords:
One-dimensional parabolic equation Nonlocal boundary conditions Bernstein basis
Operational matrices Specification of mass Integral condition
a b s t r a c t
Some physical problems in science and engineering are modelled by the parabolic partial
differential equations with nonlocal boundary specifications. In this paper, a numerical
method which employs the Bernstein polynomials basis is implemented to give the
approximate solution of a parabolic partial differential equation with boundary integral
conditions. The properties of Bernstein polynomials, and the operational matrices for
integration, differentiation and the product are introduced and are utilized to reduce the
solution of the given parabolic partial differential equation to the solution of algebraic
equations. Illustrative examples are included to demonstrate the validity and applicability
of the new technique.
©
2011 Elsevier B.V. All rights reserved.
1. Introduction
Parabolic partial differential equations with nonlocal boundary conditions feature in the mathematical modelling of
many phenomena. Therefore, recently much attention has been paid in the literature to the development, analysis and
implementation of accurate methods [
1–4
] for the numerical solution of time-dependent partial differential equations with
nonlocal boundary conditions. In this paper we consider the following one-dimensional time-dependent diffusion equation:
∂
u
∂
t
=
∂
2u
∂
x
2+
Q
(
x
,
t
),
0
<
x
<
1
,
0
<
t
≤
T
,
(1)
with the initial condition
u
(
x
,
0
)
=
f
(
x
),
0
<
x
<
1
,
(2)
and the nonlocal boundary conditions
u
(
0
,
t
)
=
∫
1 0ρ(
x
)
u
(
x
,
t
)
d
x
,
0
<
t
≤
T
,
(3)
u
(
1
,
t
)
=
∫
1 0ψ(
x
)
u
(
x
,
t
)
d
x
,
0
<
t
≤
T
,
(4)
∗
Corresponding author. Fax: +98 21 66497930.E-mail addresses:[email protected](S.A. Yousefi),[email protected](M. Behroozifar),[email protected],[email protected] (M. Dehghan).
0377-0427/$ – see front matter©2011 Elsevier B.V. All rights reserved. doi:10.1016/j.cam.2011.05.038
where
Q
,
f
, ρ
and
ψ
are known functions, while the function
u
is to be determined (for convenience the function notation
A
(
t
)
=
u
(
0
,
t
)
and
B
(
t
)
=
u
(
1
,
t
)
is used). The existence, uniqueness and continuous dependence on data of the solution of
this nonlocal boundary value problem and some other similar problems have been studied in [
5–7
]. The interested reader
can also see [
8–15
]. We also refer the reader to [
3
,
4
,
1
] for more numerical works and the theoretical discussion and some
applications.
In recent years the development of computational techniques for solving the nonlocal boundary value problems has been
an important research topic in many areas of applied science and engineering. There are several authors who have used
the well-known finite difference methods [
16
], Galerkin technique, finite element methods, spectral techniques, boundary
element procedures, and so on (see [
3
,
4
,
1
,
17–20
] and the references therein) for the solution of some kinds of nonlocal
boundary value problems. Very recently the authors of [
21
] developed a method based on the radial basis functions method
[
22
]. The authors of [
23
] presented a method based on the Galerkin technique. A more extensive list of references and a
survey on the progress made on the nonlocal boundary value problems are given in [
3
]. More works can be found in [
24
,
17
,
25–34
]. Some theoretical works and applications and numerical methods can be seen in [
35–41
]. The subject of the current
paper is the one-dimensional parabolic equation with an integral condition; however we refer the interested reader to [
42
,
43
] for the solution of the one-dimensional wave equation subject to an integral condition [
42
].
This paper is divided to the following sections. The properties of Bernstein polynomials are presented in Section
2
. The
numerical schemes for the solution of
(1)–(4)
are also described in Section
3
. The results of numerical experiments are given
in Section
4
. Section
5
consists of a brief conclusion.
2. The properties of Bernstein polynomials
The Bernstein polynomials of the
m
th degree are defined on the interval
[
a
,
b
]
as [
44
]
B
i,m(
x
)
=
m
i
(
x
−
a
)
i(
b
−
x
)
m−i(
b
−
a
)
m,
0
≤
i
≤
m
,
where
m
i
=
m
!
i
!
(
m
−
i
)
!
.
These Bernstein polynomials form a basis on
[
a
,
b
]
. There are
m
+
1
m
th-degree polynomials. For convenience, we set
B
i,m(
x
)
=
0 if
i
<
0 or
i
>
m
. A recursive definition can also be used to generate the Bernstein polynomials over
[
a
,
b
]
such that the
i
th
m
th-degree Bernstein polynomials can be written as
B
i,m(
x
)
=
(
b
−
x
)
b
−
a
B
i,m−1(
x
)
+
x
−
a
b
−
a
B
i−1,m−1(
x
).
It can easily be shown that each Bernstein polynomial is positive and the sum of all the Bernstein polynomials is unity for
all real
x
∈ [
a
,
b
]
, i.e.,
∑
mi=0
B
i,m(
x
)
=
1
.
It is easy to show that any given polynomial of degree
m
can be expanded in terms
of these basis functions.
2.1. The approximation of functions
Suppose that
H
=
L
2[
t
0,
t
f]
where
t
0,
t
f∈
R
, let
{
B
0,m,
B
1,m, . . . ,
B
m,m} ⊂
H
be the set of Bernstein polynomials of
m
th
degree, and suppose that
Y
=
Span
{
B
0,m,
B
1,m, . . . ,
B
m,m}
,
and let
f
be an arbitrary element in
H
. Since
Y
is a finite dimensional vector space,
f
has a unique best approximation from
Y
, say
y
0∈
Y
, that is
∃
y
0∈
Y
; ∀
y
∈
Y
‖
f
−
y
0‖
2≤ ‖
f
−
y
‖
2,
where
‖
f
‖
2=
√
⟨
f
,
f
⟩
.
Since
y
0∈
Y
, there exist unique coefficients
c
0,
c
1, . . . ,
c
msuch that
f
≃
y
0=
m
−
i=0
c
iB
i,m=
c
Tφ,
where
φ
T= [
B
0,m,
B
1,m, . . . ,
B
m,m]
and
c
T= [
c
0,
c
1, . . . ,
c
m]
, and
c
Tcan be obtained from
c
T⟨
φ, φ
⟩ = ⟨
f
, φ
⟩
,
where
⟨
f
, φ
⟩ =
∫
tf t0f
(
x
)φ(
x
)
Td
x
= [⟨
f
,
B
0,m⟩
,
⟨
f
,
B
1,m⟩
, . . . ,
⟨
f
,
B
m,m⟩]
,
and
⟨
φ, φ
⟩
is an
(
m
+
1
)
×
(
m
+
1
)
matrix which is said to be the dual matrix of
φ
, and is denoted by
Q
, and will be introduced
in the following. Therefore
Q
= ⟨
φ, φ
⟩ =
∫
tf t0φ(
x
)φ(
x
)
Td
x
,
and then
c
T=
∫
tf t0f
(
x
)φ(
x
)
Td
x
Q
−1.
(5)
Theorem 1.
Suppose that H is a Hilbert space and Y a closed subspace of H such that dim
Y
<
∞
and
{
y
1,
y
2,
· · ·
,
y
n}
is any
basis for Y . Let x be an arbitrary element in H and y
0be the unique best approximation to x from Y . Then
‖
x
−
y
0‖
22=
G
(
x
,
y
1,
y
2, . . . ,
y
n)
G
(
y
1,
y
2, . . . ,
y
n)
,
where
G
(
x
,
y
1,
y
2, . . . ,
y
n)
=
⟨
x
,
x
⟩
⟨
x
,
y
1⟩
· · ·
⟨
x
,
y
n⟩
⟨
y
1,
x
⟩
⟨
y
1,
y
1⟩
· · ·
⟨
y
1,
y
n⟩
...
...
...
⟨
y
n,
x
⟩
⟨
y
n,
y
1⟩
· · ·
⟨
y
n,
y
n⟩
.
Proof.
See [
45
].
We define the inner product in
L
2[
t
0
,
t
f]
by
⟨
f
,
g
⟩ =
tft0
f
(t)g
(t)d
t
and the subspace
Y
=
Span
{
B
0,m,
B
1,m, . . . ,
B
m,m}
, so
the absolute error presented in
Theorem 1
can be written as
‖
x
−
y
0‖ =
det
tf t0ψ
(t)ψ
T (t)d
t
det
tf t0φ
(t)φ
T (t)d
t
,
where
φ
T= [
B
0,m
,
B
1,m, . . . ,
B
m,m]
and
ψ
T= [
x
,
B
0,m,
B
1,m, . . . ,
B
m,m]
. The exact value of the approximation error is
presented by the above theorem, but in the following lemma we present an upper bound for estimating the error.
Lemma 2.
Suppose that the function g
: [
t
0,
t
f] →
R
is m
+
1
times continuously differentiable, g
∈
C
m+1[
t
0,
t
f]
,
and
Y
=
Span
{
B
0,m,
B
1,m, . . . ,
B
m,m}
. If c
Tφ
is the best approximation to g from Y then the mean error bound is presented as follows:
‖
g
−
c
Tφ
‖
2≤
M
(
t
f−
t
0)
2m+3 2(
m
+
1
)
!
√
2
m
+
3
,
where M
=
max
x∈[t0,tf]|
g
(m+1)(
x
)
|
.
Proof.
We consider the Taylor polynomial
y
1(
x
)
=
g
(
t
0)
+
g
′(
t
0)(
x
−
t
0)
+ · · · +
g
(m)(
t
0)
(x−t0)m
m!
for which we know that
|
g
(
x
)
−
y
1(
x
)
| ≤ |
g
(m+1)(η)
|
(
x
−
t
0)
m+1(
m
+
1
)
!
,
(6)
where
η
∈
(
t
0,
t
f)
. Since
c
Tφ
is the best approximation to
g
from
Y
, and
y
1∈
Y
, using
(6)
we have
‖
g
−
c
Tφ
‖
22≤ ‖
g
−
y
1‖
22=
∫
tf t0|
g
(
x
)
−
y
1(
x
)
|
2d
x
≤
∫
tf t0[
g
(m+1)(η)
(
x
−
t
0)
m+1(
m
+
1
)
!
]
2d
x
≤
M
2(
m
+
1
)
!
2∫
tf t0(
x
−
t
0)
2m+2d
x
=
M
2(
t
f−
t
0)
2m+3[
(
m
+
1
)
!
2]
(
2
m
+
3
)
,
and by taking the square roots we have the above bound.
Now, we want to show this approximation converges to
f
only with the continuity condition of
f
when
m
→ ∞
.
Definition.
We define the modulus of continuity
ω(
f
, δ)
of a general function
f
on
[
t
0,
t
f]
by
ω(
f
, δ)
=
sup
x,y∈[t0,tf]|x−y|≤δ
Lemma 3.
f
(
x
)
is uniformly continuous on
[
t
0,
t
f]
if and only if
lim
δ→0ω(
f
, δ)
=
0
.
Proof.
See [
46
].
Theorem 2.
If f
(
x
)
be bounded on
[
0
,
1
]
then
‖
f
−
p
(
f
,
m
)
‖
∞≤
3
2
ω
f
,
√
1
m
,
where p
(
f
,
m
)
=
∑
m k=0f
(
km
)
B
k,mand
‖
f
‖
∞=
sup
{|
f
(
x
)
| :
x
∈
domain of f
}
; also if f satisfies a Lipschitz condition of order
α
on
[
0
,
1
]
then
‖
f
−
p
(
f
,
m
)
‖
∞≤
3
2
km
−α2
,
where k is the Lipschitz constant.
Proof.
See [
46
].
Lemma 4.
If f
(
x
)
is bounded on
[
0
,
1
]
and Y
=
Span
{
B
0,m,
B
1,m, . . . ,
B
m,m}
then
‖
f
−
c
Tφ
‖
2≤
3
2
ω
f
,
√
1
m
,
where c
Tφ
is the best approximation to f from Y .
Proof.
Since
c
Tφ
is the best approximation to
f
from
Y
and
p
(
f
,
m
)
∈
Y
, using
‖
f
‖
2
≤ ‖
f
‖
∞we have
‖
f
−
c
Tφ
‖
2≤ ‖
f
−
p
(
t
,
f
)φ
‖
2≤ ‖
f
−
p
(
t
,
f
)φ
‖
∞≤
3
2
ω
f
,
√
1
m
.
Note that if
f
is defined on
[
t
0,
t
f]
, we can transfer
[
t
0,
t
f]
to
[
0
,
1
]
and if
f
is uniformly continuous on
[
0
,
1
]
, by using
Lemmas 3
and
4
, we have lim
m→∞ω(
f
,
√1m)
=
0.
2.2. The operational matrices of the Bernstein polynomials
The operational matrices for the integration
P
m, differentiation
D
m, dual
Q
mand product
C
ˆ
mare respectively given by
∫
x 0φ
m(
t
)
d
t
≃
P
mφ
m(
x
),
d
d
x
φ
m(
x
)
≃
D
mφ
m(
x
),
Q
m=
∫
b aφ
m(
x
)φ
mT(
x
)
d
x
,
c
Tφ
m(
x
)φ
m(
x
)
T≃
φ
m(
x
)
T
C
m.
The details of the obtaining of these matrices are given in [
47
].
3. Solution of the problem
In this section we want to convert the main problem to an equivalent integro-differential equation which includes
conditions
(1)–(4)
using a technique which can be generalized to equations in higher dimensions. From Eq.
(1)
we can
write
u
xx(
x
,
t
)
=
u
t(
x
,
t
)
−
Q
(
x
,
t
),
so
u
x(
x
,
t
)
=
u
x(
0
,
t
)
+
∫
x 0u
xx(
s
,
t
)
d
s
=
u
x(
0
,
t
)
+
∫
x 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
,
and then
u
(
x
,
t
)
=
A
(
t
)
+
∫
x 0u
x(
s
,
t
)
d
s
.
Therefore
u
(
x
,
t
)
=
A
(
t
)
+
xu
x(
0
,
t
)
+
∫
x 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
.
(7)
From
(4)
and
(7)
we obtain
B
(
t
)
=
u
(
1
,
t
)
=
A
(
t
)
+
u
x(
0
,
t
)
+
∫
1 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
,
so
u
x(
0
,
t
)
=
B
(
t
)
−
(
A
(
t
)
+
∫
1 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
).
(8)
Replacing
(8)
in
(7)
yields
u
(
x
,
t
)
=
(
1
−
x
)
A
(
t
)
+
xB
(
t
)
−
x
∫
1 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
+
∫
x 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
.
(9)
For applying
(2)
we differentiate both sides of
(9)
with respect to
t
:
∂
u
(
x
,
t
)
∂
t
=
∂
∂
t
[
(
1
−
x
)
A
(
t
)
+
xB
(
t
)
−
x
∫
1 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
+
∫
x 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
]
,
(10)
and then integrating both sides of
(10)
with respect to
t
gives
u
(
x
,
t
)
−
u
(
x
,
0
)
=
∫
t 0∂
∂
t
[
(
1
−
x
)
A
(
t
)
+
xB
(
t
)
−
x
∫
1 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
+
∫
x 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
]
d
t
,
and therefore we can write
u
(
x
,
t
)
=
f
(
x
)
+
∫
t 0∂
∂
t
[
(
1
−
x
)
A
(
t
)
+
xB
(
t
)
−
x
∫
1 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
+
∫
x 0∫
s 0[
u
t(
s
,
t
)
−
Q
(
s
,
t
)
]
d
s
d
s
]
d
t
.
(11)
Now, we approximate the functions that satisfy
(11)
using the Bernstein polynomials given by
(5)
:
u
(
x
,
t
)
=
φ
T(
x
)
C
φ(
t
),
f
(
x
)
=
φ
T(
x
)
F
φ(
t
),
Q
(
x
,
t
)
=
φ
T(
x
)
K
φ(
t
),
(12)
ρ(
x
)
=
ρ
Tφ(
x
),
ψ(
x
)
=
ψ
Tφ(
x
),
1
−
x
=
φ(
x
)
Te
1,
x
=
φ(
x
)
Te
2,
where
C
,
F
, and
K
are
(
m
+
1
)
×
(
m
+
1
)
matrices and
ρ, ψ,
e
1and
e
2are
(
m
+
1
)
×
1 matrices; also
C
is the only unknown
matrix and the rest of the matrices are known. Using
(12)
we have
A
(
t
)
=
u
(
0
,
t
)
=
∫
1 0ρ(
x
)
u
(
x
,
t
)
=
∫
1 0ρ
Tφ(
x
)φ
T(
x
)
C
φ(
t
)
d
x
=
ρ
T∫
1 0φ(
x
)φ
T(
x
)
d
x
C
φ(
t
)
=
ρ
TQ
mC
φ(
t
),
(13)
B
(
t
)
=
u
(
1
,
t
)
=
∫
1 0ψ(
x
)
u
(
x
,
t
)
=
∫
1 0ψ
Tφ(
x
)φ
T(
x
)
C
φ(
t
)
d
x
=
ψ
T∫
1 0φ(
x
)φ
T(
x
)
d
x
C
φ(
t
)
=
ψ
TQ
mC
φ(
t
).
(14)
Substituting
(12)–(14)
in
(11)
and using the operational matrix of integration
P
m, the operational matrix of differentiation
D
mand the dual matrix
Q
myields
φ
T(
x
)
C
φ(
t
)
=
φ
T(
x
)
F
φ(
t
)
+
∫
t 0∂
∂
t
[
φ
T(
x
)
[
e
1ρ
TQ
mC
+
e
2ψ
TQ
mC
−
e
2φ
T(
1
)(
P
mT)
2(
CD
m−
K
)
+
(
P
mT)
2(
CD
m−
K
)
]
φ(
t
)
]
d
t
=
φ
T(
x
)
F
φ(
t
)
+
∫
t 0∂
∂
t
[
φ
T(
x
)
Y
φ(
t
)
]
d
t
,
where
Y
=
e
1ρ
TQ
mC
+
e
2ψ
TQ
mC
−
e
2φ
T(
1
)(
P
mT)
2(
CD
m−
K
)
+
(
P
mT)
2(
CD
m−
K
).
Using the operational matrices we have
φ
T(
x
)
C
φ
T(
t
)
=
φ
T(
x
)
[
F
+
YD
m
P
m]
φ(
t
),
and so the following set of algebraic equations is obtained:
C
=
F
+
YD
mP
m.
3.1. The extension to higher dimensional problems
This technique can be easily generalized to solve the two-dimensional heat equation with nonlocal boundary conditions.
Consider the two-dimensional time-dependent diffusion equation [
48–51
]
u
t=
u
xx+
u
yy,
with initial condition given by
u
(
x
,
y
,
0
)
=
f
1(
x
,
y
),
and the nonlocal boundary specifications [
48
]
u
(
0
,
y
,
t
)
=
∫
1 0∫
1 0κ(
0
,
y
, η, γ )
u
(η, γ ,
t
)
d
η
d
γ
=
f
2(
y
,
t
),
u
(
1
,
y
,
t
)
=
∫
1 0∫
1 0κ(
1
,
y
, η, γ )
u
(η, γ ,
t
)
d
η
d
γ
=
f
3(
y
,
t
),
u
(
x
,
0
,
t
)
=
∫
1 0∫
1 0κ(
x
,
0
, η, γ )
u
(η, γ ,
t
)
d
η
d
γ
=
f
4(
x
,
t
),
u
(
x
,
1
,
t
)
=
∫
1 0∫
1 0κ(
x
,
1
, η, γ )
u
(η, γ ,
t
)
d
η
d
γ
=
f
5(
x
,
t
).
This problem can be converted to an integro-differential equation using the presented technique as
u
(
x
,
y
,
t
)
=
f
1(
x
,
y
)
+
∫
t 0∂
∂
t
u
2(
x
,
y
,
k
)
d
k
,
where
u
2(
x
,
y
,
t
)
=
f
4(
x
,
t
)
+
y
f
5(
x
,
t
)
−
f
4(
x
,
t
)
−
∫
1 0∫
n 0∂
2∂
y
2[
u
3(
x
,
m
,
t
)
]
d
m
d
n
+
∫
y 0∫
n 0∂
2∂
y
2[
u
3(
x
,
m
,
t
)
]
d
m
d
n
,
u
3(
x
,
y
,
t
)
=
f
2(
y
,
t
)
+
x
f
3(
y
,
t
)
−
f
2(
y
,
t
)
−
∫
1 0∫
r 0∂
2∂
x
2[
u
4(
s
,
y
,
t
)
]
d
s
d
r
+
∫
x 0∫
r 0∂
2∂
x
2[
u
4(
s
,
y
,
t
)
]
d
s
d
r
,
∂
2∂
x
2[
u
4(
x
,
y
,
t
)
] =
∂
∂
t
[
u
(
x
,
y
,
t
)
] −
∂
2∂
y
2[
u
(
s
,
y
,
t
)
]
.
For the two-dimensional parabolic equation with nonlocal and Neumann boundary conditions, the interested reader can
see [
19
,
20
].
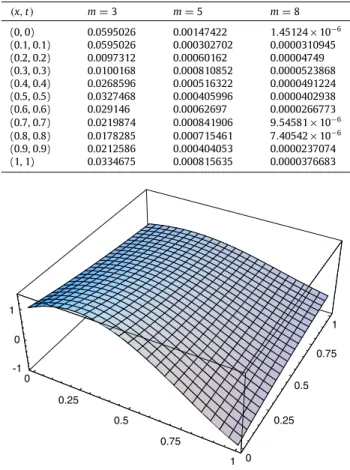
Table 1 Absolute error ofu
(
x,
t)
.(
x,
t)
m=
3 m=
5 m=
8 (0, 0) 0.0595026 0.00147422 1.
45124×
10−6 (0.1, 0.1) 0.0595026 0.000302702 0.0000310945 (0.2, 0.2) 0.0097312 0.00060162 0.00004749 (0.3, 0.3) 0.0100168 0.000810852 0.0000523868 (0.4, 0.4) 0.0268596 0.000516322 0.0000491224 (0.5, 0.5) 0.0327468 0.000405996 0.0000402938 (0.6, 0.6) 0.029146 0.00062697 0.0000266773 (0.7, 0.7) 0.0219874 0.000841906 9.
54581×
10−6 (0.8, 0.8) 0.0178285 0.000715461 7.
40542×
10−6 (0.9, 0.9) 0.0212586 0.000404053 0.0000237074 (1, 1) 0.0334675 0.000815635 0.0000376683Fig. 1. Estimated and exact solutions ofu
(
x,
t)
.4. Illustrative examples
To demonstrate the applications of the new method described in the current paper and its performance, the results
obtained for several examples [
3
,
4
,
1
,
17
,
18
] are presented in this section.
Example 1.
Consider Eqs.
(1)–(4)
with
ρ(
x
)
=
2 sin
(π
x
),
ψ(
x
)
= −
2 cos
(π
x
),
f
(
x
)
=
sin
(π
x
)
+
cos
(π
x
),
Q
(
x
,
t
)
=
(π
2−
1
)
e
−t(
sin
(π
x
)
+
cos
(π
x
)),
which has the exact solution
u
(
x
,
t
)
=
e
−t(
sin
(π
x
)
+
cos
(π
x
)).
We plot the estimated and exact solutions in
Fig. 1
and present the absolute error
u
(
x
,
t
)
for some points in
Table 1
.
Example 2.
Consider Eqs.
(1)–(4)
with
ρ(
x
)
=
0
,
ψ(
x
)
=
3
,
f
(
x
)
=
x
2,
Q
(
x
,
t
)
= −
(
2
+
x
2)
e
−t,
which has the exact solution
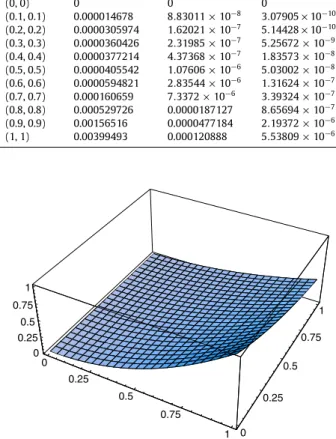
Table 2 Absolute error ofu
(
x,
t)
.(
x,
t)
m=
3 m=
5 m=
7 (0, 0) 0 0 0 (0.1, 0.1) 0.000014678 8.
83011×
10−8 3.
07905×
10−10 (0.2, 0.2) 0.0000305974 1.
62021×
10−7 5.
14428×
10−10 (0.3, 0.3) 0.0000360426 2.
31985×
10−7 5.
25672×
10−9 (0.4, 0.4) 0.0000377214 4.
37368×
10−7 1.
83573×
10−8 (0.5, 0.5) 0.0000405542 1.
07606×
10−6 5.
03002×
10−8 (0.6, 0.6) 0.0000594821 2.
83544×
10−6 1.
31624×
10−7 (0.7, 0.7) 0.000160659 7.
3372×
10−6 3.
39324×
10−7 (0.8, 0.8) 0.000529726 0.0000187127 8.
65694×
10−7 (0.9, 0.9) 0.00156516 0.0000477184 2.
19372×
10−6 (1, 1) 0.00399493 0.000120888 5.
53809×
10−6Fig. 2. Estimated and exact solutions ofu
(
x,
t)
.We plot the estimated and exact solutions in
Fig. 2
and present the absolute error
u
(
x
,
t
)
for some points in
Table 2
.
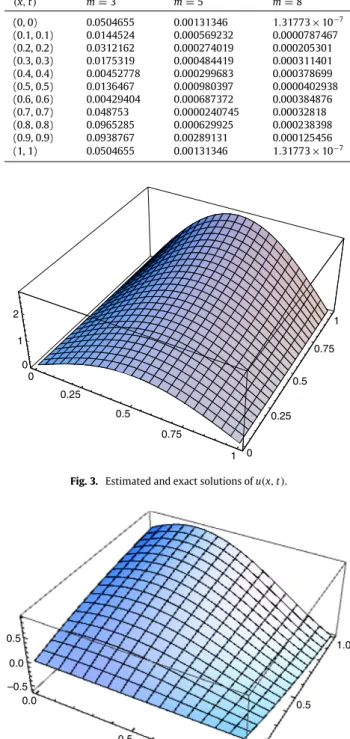
Example 3.
Consider the main partial differential equation such that
ρ(
x
)
=
0
,
ψ(
x
)
=
0
,
f
(
x
)
=
sin
(π
x
),
Q
(
x
,
t
)
=
(π
2+
1
)
e
tsin
(π
x
),
which has the exact solution
u
(
x
,
t
)
=
e
tsin
(π
x
).
We plot the estimated and exact solutions in
Fig. 3
and present the absolute error
u
(
x
,
t
)
for some points in
Table 3
.
Example 4.
Consider Eqs.
(1)–(4)
with [
30
]
ρ(
x
)
=
2 cos
(π
x
),
ψ(
x
)
= −
sin
(π
x
),
f
(
x
)
=
0
,
Q
(
x
,
t
)
=
(
sin
(π
x
)
+
cos
(π
x
))(
1
+
e
−t+
π
2(
1
−
e
−t)),
having the exact solution
u
(
x
,
t
)
=
(
sin
(π
x
)
+
cos
(π
x
))(
1
−
e
−t).
We plot the estimated and exact solutions in
Fig. 4
and present the absolute error
u
(
x
,
t
)
with
m
=
8 and the absolute error
Table 3 Absolute error ofu
(
x,
t)
.(
x,
t)
m=
3 m=
5 m=
8 (0, 0) 0.0504655 0.00131346 1.
31773×
10−7 (0.1, 0.1) 0.0144524 0.000569232 0.0000787467 (0.2, 0.2) 0.0312162 0.000274019 0.000205301 (0.3, 0.3) 0.0175319 0.000484419 0.000311401 (0.4, 0.4) 0.00452778 0.000299683 0.000378699 (0.5, 0.5) 0.0136467 0.000980397 0.0000402938 (0.6, 0.6) 0.00429404 0.000687372 0.000384876 (0.7, 0.7) 0.048753 0.0000240745 0.00032818 (0.8, 0.8) 0.0965285 0.000629925 0.000238398 (0.9, 0.9) 0.0938767 0.00289131 0.000125456 (1, 1) 0.0504655 0.00131346 1.
31773×
10−7Fig. 3. Estimated and exact solutions ofu
(
x,
t)
.Fig. 4. Estimated and exact solutions ofu
(
x,
t)
.Example 5.
Consider the parabolic partial differential equation [
52
] such that
ρ(
x
)
=
ψ(
x
)
= −
δ,
f
(
x
)
=
x
(
x
−
1
)
+
δ
6
(
1
+
δ)
,
Table 4
Absolute error ofu
(
x,
t)
.(
x,
t)
Presented method withm=
8 Method [30] (0.2, 0.1) 0.0000286444 6.
6929×
10−5 (0.5, 0.25) 0.0000300034 1.
61436×
10−4 (0.9, 0.45) 0.0000204942 2.
37638×
10−4 (0.1, 0.2) 0.0000354157 8.
887543×
10−5 (0.25, 0.25) 0.0000421702 1.
44744×
10−4 (0.45, 0.9) 0.0000377174 4.
60293×
10−5 (0.2, 0.2) 0.0000392584 1.
00066×
10−4 (0.4, 0.4) 0.0000405778 1.
77034×
10−4 (0.6, 0.6) 0.0000209623 1.
77352×
10−4 (0.8, 0.8) 6.
67387×
10−6 1.
00247×
10−4 (0.9, 0.9) 0.0000205537 6.
02934×
10−4Fig. 5. Estimated and exact solutions ofu
(
x,
t)
.Q
(
x
,
t
)
= −
e
−t[
x
(
x
−
1
)
+
2
+
δ
6
(
1
+
δ)
]
,
which has the exact solution
u
(
x
,
t
)
=
e
−t[
x
(
x
−
1
)
+
δ
6
(
1
+
δ)
]
, δ
=
0
.
0144
,
0
≤
x
≤
1
,
0
≤
t
≤
3
.
We first transfer 0
≤
t
≤
3 to
[
0
,
1
]
, so the equation is converted to
ρ(
x
)
=
ψ(
x
)
= −
δ,
f
(
x
)
=
x
(
x
−
1
)
+
δ
6
(
1
+
δ)
,
Q
(
x
,
t
)
= −
e
−3t[
2
+
3
x
(
x
−
1
)
+
δ
6
(
1
+
δ)
]
,
with the exact solution
u
(
x
,
t
)
=
e
−3t[
x
(
x
−
1
)
+
δ
6
(
1
+
δ)
]
, δ
=
0
.
0144
,
0
≤
x
≤
1
,
0
≤
t
≤
1
.
We plot the estimated and exact solutions of
u
(
x
,
t
)
in
Fig. 5
and present the absolute error for some points in
Table 5
.
5. Conclusion
In this paper the operational matrices for integration, differentiation, the product and the dual of Bernstein polynomials
basis are utilized to reduce solving the parabolic differential equation with nonlocal boundary conditions to the solution of
algebraic equations. The new method presented in the current paper can readily be extended to other appropriate parabolic
partial differential equations. The technique is general, easy to implement, and yields very accurate results. The numerical
Table 5
Absolute error ofu
(
x,
t)
.(
x,
t)
Presented method withm=
8(0, 0) 3
.
4386×
10−11 (0.1, 0.1) 0.0000171854 (0.2, 0.2) 0.0000454002 (0.3, 0.3) 0.0000690248 (0.4, 0.4) 0.0000840029 (0.5, 0.5) 0.0000894203 (0.6, 0.6) 0.0000853707 (0.7, 0.7) 0.0000725889 (0.8, 0.8) 0.0000525127 (0.9, 0.9) 0.0000272053 (1, 1) 8.
20626×
10−7tests obtained by using the method developed in this article show that the new method produces acceptable results. Also
the presented upper bound of the error suggests convergence to the exact solution when
m
→ ∞
. It is worth noting
that the new technique developed in the current paper can be extended to solve similar problems in higher dimensions
[
48–51
,
19
].
Acknowledgments
The authors are very grateful to both reviewers for carefully reading the paper and for their comments and suggestions
which have led to improvement of the paper. Also we would like to thank the principal editor Professor Taketomo Mitsui
for managing the review process for this paper.
Appendix
Here, we describe how the smallness of the integral kernel in the nonlocal boundary condition affects the numerical
method. Therefore, we express some points as follows:
Definition 1.
Let
A
= [
a
i,j]
(m+1)×(m+1)and
B
= [
b
i,j]
(m+1)×(m+1); we say that
A
≤
B
if only if
a
i,j≤
b
i,jfor
i
,
j
=
1
,
2
, . . . ,
m
+
1.
Definition 2.
Function
G
(
x
,
t
)
∈
L
2[
0
,
1
]
is called small whenever
1 0
1 0(
G
(
x
,
t
))
2
d
x
d
t
<
1
.
Proposition 1.
Let
φ
T= [
B
0,m,
B
1,m, . . . ,
B
m,m]
; then
1 0φ(
t
)
T
d
t
=
1m+1
[
1
,
1
, . . . ,
1
]
.
Also let Q be the operational matrix of
the dual; then the summation of elements of any column and any row of Q
−1is m
+
1
.
Proof.
See [
47
].
It is clear that if function
G
(
x
,
t
)
is small then
G
(
x
,
t
)
is bounded, i.e.
∃
k
; ∀
(
x
,
t
)
∈ [
0
,
1
] × [
0
,
1
]
|
G
(
x
,
t
)
|
<
k
,
so the coefficient matrix
G
¯
= [ ¯
G
i,j]
(m+1)×(m+1)in the approximation
G
(
x
,
t
)
≃
φ(
x
)
TG
¯
φ(
t
)
has bounded elements because
−
k
<
G
(
x
,
t
) <
k
H⇒ −
k
< φ(
x
)
TG
¯
φ(
t
) <
k
⇒
−
k
φ(
x
)φ(
t
)
T< φ(
x
)φ(
x
)
TG
¯
φ(
t
)φ(
t
)
T<
k
φ(
x
)φ(
t
)
T⇒
−
k
∫
1 0∫
1 0φ(
x
)φ(
t
)
Td
x
d
t
<
∫
1 0∫
1 0(φ(
x
)φ(
x
)
TG
¯
φ(
t
)φ(
t
)
T)
d
x
d
t
<
∫
1 0∫
1 0k
φ(
x
)φ(
t
)
Td
x
d
t
.
Using
Proposition 1
we obtain
−
k
(
m
+
1
)
21
<
Q
¯
GQ
<
k
(
m
+
1
)
21
,
in which
1
is an
(
m
+
1
)
×
(
m
+
1
)
matrix whose elements are all 1. By multiplying both sides of this inequality by
Q
−1and
employing
Proposition 1
we obtain
−
k1
<
G
¯
<
k1
,
so
−
k
<
G
¯
i,j<
k
for
i
,
j
=
1
,
2
, . . . ,
m
+
1.
In this paper, we finally obtain a system of nonlinear algebraic equations. If the integral kernels are small then the
elements of the coefficient matrix of their approximations will be bounded, so the existing coefficient matrices in the system
of algebraic equations shrink and can be effectively solved, and thus the accuracy of the method increases.
References
[1] M. Dehghan, Efficient techniques for the second-order parabolic equation subject to nonlocal specifications, Appl. Num. Math. 25 (2005) 39–62. [2] S. Wang, Y. Lin, A numerical method for the diffusion equation with nonlocal boundary specifications, Int. J. Eng. Sci. 28 (1990) 543–546.
[3] M. Dehghan, A computational study of the one-dimensional parabolic equation subject to nonclassical boundary specifications, Numer. Methods Partial. Diff. Eqs. 22 (2006) 220–257.
[4] M. Dehghan, The one-dimensional heat equation subject to a boundary integral specification, Chaos Solitons Fractals 32 (2007) 661–675. [5] A. Bouziani, On a class of parabolic equations with a nonlocal boundary condition, Acad. Roy. Belg. Bull. Cl. Sci. 10 (1999) 61–77.
[6] A. Bouziani, Strong solution for a mixed problem with nonlocal condition for a certain pluriparabolic equations, Hiroshima Math. J. 27 (1997) 373–390. [7] J.R. Cannon, H.M. Yin, On a class of non-classical parabolic problems, J. Differential Equations 79 (1989) 266–288.
[8] A. Ashyralyev, A. Yurtsever, On a nonlocal boundary value problem for semilinear hyperbolic–parabolic equations, Nonlinear Anal. TMA 47 (2001) 3585–3592.
[9] J.R. Cannon, The One-Dimensional Heat Equation, in: Encyclopedia of Mathematics and its Applications, vol. 23, Addison-Wesley Publishing, Reading, MA, 1984.
[10] Y.S. Choi, K.Y. Chan, A parabolic equation with nonlocal boundary condition arising from electrochemistry, Nonlinear Anal. TMA 18 (1992) 317–331. [11] W.A. Day, Parabolic equations and thermodynamics, Quart. Appl. Math. 50 (1992) 523–533.
[12] W.A. Day, A decreasing property of solutions of a parabolic equation with applications to thermoelasticity and other theories, Quart. Appl. Math. 41 (1983) 468–475.
[13] W.A. Day, Heat Conduction within Linear Thermoelasticity, Springer, New York, 1985.
[14] A. Friedman, Monotonic decay of solutions of parabolic equation with nonlocal boundary conditions, Quart. Appl. Math. XLIX (1986) 468–475. [15] S. Mesloub, On a singular two dimensional nonlinear evolution equation with nonlocal conditions, Nonlinear Anal. TMA 68 (2008) 2594–2607. [16] M. Dehghan, Finite difference procedures for solving a problem arising in modeling and design of certain optoelectronic devices, Math. Comput.
Simulat. 71 (2006) 16–30.
[17] M. Dehghan, Numerical solution of a parabolic equation with non-local boundary specifications, Appl. Math. Comput. 145 (2003) 185–194. [18] M. Dehghan, Numerical solution of a parabolic equation subject to specification of energy, Appl. Math. Comput. 149 (2004) 31–45.
[19] M. Dehghan, Second-order schemes for a boundary value problem with Neumann’s boundary conditions, J. Comput. Appl. Math. 138 (2002) 173–184. [20] M. Dehghan, Numerical solution of a non-local boundary value problem with Neumann’s boundary conditions, Communications in Numerical Methods
in Engineering 19 (2003) 1–12.
[21] M. Tatari, M. Dehghan, On the solution of the non-local parabolic partial differential equations via radial basis functions, Appl. Math. Modelling 33 (2009) 1729–1738.
[22] M. Dehghan, A. Shokri, A numerical method for solution of the two-dimensional sine-Gordon equation using the radial basis functions, Math. Comput. Simulat. 79 (2008) 700–715.
[23] A. Bouziani, N. Merazga, S. Benamira, Galerkin method applied to a parabolic evolution problem with nonlocal boundary conditions, Nonlinear Analysis: TMA 69 (2008) 1515–1524.
[24] W.T. Ang, A method of solution for the one-dimensional heat equation subject to nonlocal conditions, SEA Bull. Math. 26 (2002) 197–203. [25] M. Dehghan, M. Ramezani, Composite spectral method for solution of the diffusion equation with specification of energy, Numer. Methods Partial
Diff. Eqs. 24 (2008) 950–959.
[26] A. Golbabai, M. Javidi, A numerical solution for non-classical parabolic problem based on Chebyshev spectral collocation method, Appl. Math. Comput. 190 (2007) 179–185.
[27] A.B. Gumel, On the numerical solution of the diffusion equation subject to the specification of mass, J. Aust. Math. Soc. Ser. B 40 (1999) 475–483. [28] Y. Liu, Numerical solution of the heat equation with nonlocal boundary conditions, J. Comput. Appl. Math. 110 (1999) 115–127.
[29] J. Martin-Vaquero, Two-level fourth-order explicit schemes for diffusion equations subject to boundary integral specifications, Chaos Solitons Fractals 42 (2009) 2364–2372.
[30] L. Mu, H. Du, The solution of a parabolic differential equation with non-local boundary conditions in the reproducing kernel space, Appl. Math. Comput. 202 (2008) 708–714.
[31] J. Qin, The new alternating direction implicit difference methods for solving three-dimensional parabolic equations, Appl. Math. Modelling 34 (2010) 890–897.
[32] A. Saadatmandi, M. Razzaghi, A Tau method approximation for the diffusion equation with nonlocal boundary conditions, Int. J. Comput. Math. 81 (2004) 1427–1432.
[33] Z.Z. Sun, A second-order accurate finite difference scheme for a class of nonlocal parabolic equations with natural boundary conditions, J. Comput. Appl. Math. 76 (1996) 137–146.
[34] Y. Zhou, M. Cui, Yingzhen Lin, Numerical algorithm for parabolic problems with non-classical conditions, J. Comput. Appl. Math. 30 (2009) 770–780. [35] M.I.M. Copetti, A one-dimensional thermoelastic problem with unilateral constraint, Math. Comput. Simul. 59 (2002) 361–376.
[36] J.H. Cushman, On diffusion in fractal porous media, Water Resour. Res. 27 (1991) 643–644.
[37] G. Dagan, The significance of heterogeneity of evolving scales to transport in porous formations, Water Resour. Res. 30 (1994) 3327–3336. [38] G. Ekolin, Finite difference methods for a nonlocal value problem for the heat equation, BIT 31 (1991) 245–255.
[39] J. Marti’n-Vaquero, J. Vigo-Aguiar, On the numerical solution of the heat conduction equations subject to nonlocal conditions, Appl. Numer. Math. 59 (2009) 2507–2514.
[40] C.V. Pao, Reaction diffusion equations with nonlocal boundary and nonlocal initial conditions, J. Math. Anal. Appl. 195 (1995) 702–718. [41] C.V. Pao, Numerical methods for nonlinear integro-parabolic equations of Fredholm type, Comput. Math. Appl. 41 (2001) 857–877.
[42] M. Dehghan, On the solution of an initial–boundary value problem that combines Neumann and integral condition for the wave equation, Numerical Methods for Partial Differential Equations 21 (2005) 24–40.
[43] F. Shakeri, M. Dehghan, The method of lines for solution of the one-dimensional wave equation subject to an integral conservation condition, Comput. Math. Appl. 56 (2008) 2175–2188.
[44] M.I. Bhatti, P. Bracken, Solutions of differential equations in a Bernstein polynomial basis, J. Comput. Appl. Math. 205 (2007) 272–280. [45] E. Kreyszig, Introductory Functional Analysis with Applications, John Wiley and sons. Inc., 1978.
[46] T.J. Rivlin, An Introduction to the Approximation of Functions, Dover Publications, 1981.
[47] S.A. Yousefi, M. Behroozifar, Operational matrices of Bernstein polynomials and their applications, Int. J. Syst. Sci 41 (2010) 709–716.
[48] M. Dehghan, M. Shamsi, Numerical solution of two-dimensional parabolic equation subject to nonstandard boundary specifications using the pseudospectral Legendre method, Numer. Methods Partial. Diff. Eqs. 22 (2006) 1255–1266.
[49] M. Dehghan, Fully explicit finite difference methods for two-dimensional diffusion with an integral condition, Nonlinear Analysis, Theory, Methods and Applications 48 (2002) 637–650.
[50] M. Dehghan, A new AD1 technique for two-dimensional parabolic equation with an integral condition, Comput. Math. Appl. 43 (2002) 1477–1488. [51] M. Dehghan, Numerical solution of the three-dimensional parabolic equation with an integral condition, Numerical Methods for Partial Differential
Equations 18 (2002) 193–202.
![Fig. 5. Estimated and exact solutions of u ( x , t ) . Q ( x , t ) = − e − t [ x ( x − 1 ) + 2 + δ 6 ( 1 + δ) ] , which has the exact solution](https://thumb-us.123doks.com/thumbv2/123dok_us/473504.2555949/10.816.230.583.104.556/fig-estimated-exact-solutions-q-δ-exact-solution.webp)