Embedded
neural
network
for
real-time
animal
behavior
classification
D.
Gutierrez-Galan
,
Juan
P.
Dominguez-Morales,
E.
Cerezuela-Escudero,
A.
Rios-Navarro,
R.
Tapiador-Morales,
M.
Rivas-Perez,
M.
Dominguez-Morales,
A.
Jimenez-Fernandez,
A.
Linares-Barranco
RoboticandTechnologyofComputersLab,DepartmentofArchitectureandTechnologyofComputers,UniversityofSeville,Av.ReinaMercedess/n,41012 Sevilla,Spain
Keywords: Monitoringwildlife Wirelesssensornetwork Neuralnetwork Multilayerperceptron Sensorfusion Embeddeddevice
a
b
s
t
r
a
c
t
Recentbiologicalstudieshavefocusedonunderstandinganimalinteractionsandwelfare.Tohelp biolo-giststoobtainanimals’behaviorinformation,resourceslikewirelesssensornetworksareneeded. More-over,largeamountsofobtaineddatahavetobeprocessedoff-lineinordertoclassifydifferentbehaviors. Therearerecentresearchprojectsfocusedondesigningmonitoringsystemscapableofmeasuringsome animals’parametersinordertorecognizeandmonitortheirgaitsorbehaviors.However,network unre-liabilityandhighpowerconsumptionhavelimitedtheirapplicability.
Inthiswork,wepresentananimalbehaviorrecognition,classificationandmonitoringsystembasedon awirelesssensor networkand asmartcollardevice,provided withinertialsensorsandanembedded multi-layerperceptron-basedfeed-forward neural network,to classify the different gaits orbehaviors basedonthecollectedinformation.In similarworks, classificationmechanismsareimplementedina server(or basestation).Themain noveltyofthiswork isthe fullimplementation ofareconfigurable neuralnetworkembeddedintotheanimal’scollar,whichallowsareal-timebehaviorclassificationand enablesitslocalstorageinSDmemory.Moreover,thisapproachreducestheamountofdatatransmitted tothebasestation(anditsperiodicity),achievingasignificantlyimprovingbatterylife.Thesystemhas beensimulatedandtestedinarealscenarioforthreedifferenthorsegaits,usingdifferentheuristicsand sensorstoimprovetheaccuracyofbehaviorrecognition,achievingamaximumof81%.
1.Introduction
Thestudyandmonitoringofwildlifehasalwaysbeenasubject
ofgreatinterestsincethequantitativemeasurementofanimal
be-havior is an importanttool forunderstanding their reproduction,
survival, welfareandinteraction withother animals. It is
impor-tant to studythe motion patternsof wildanimals andhow they
maybeaffectedby changesinweather,floraorbythe
introduc-tionofnon-nativespecies.Learningsuchdetailsaboutwildlife
re-quireslong-termactivitylogsaswellasotherbiometricdatasuch
asheartrate,bodytemperature,movementspeedandfrequency
offeeding.Therefore,thedesignanddeploymentofamonitoring
systemcapableofobtainingbehavioralinformationfromanimals
hasbeenthefocusofseveralstudies[1–5].
Collectingandprocessingrelevantinformationfromwildlife is
ahard technologicaltask[6–8] duetoseveralfactors thatneedto
be solved:(1) the developmentof lightweight andlower
power-consumption devicesto attach to the animal, (2)the design and
implementation ofa wireless network to collect the information
fromthose devices,and (3)storingthe data andits further
pro-cessingmechanisms.
Thebehavioralparametersofananimalcanbemeasuredusing
differenttypesofsensors.Withthisdata,differentcommunication
strategiescanbe deployedtosendthe collectedinformation.The
traditionalVery High Frequency(VHF) radio-tracking system
col-lapsesassoonasitstartsusingmultiplecollarsduetothescarcity
offrequencies assigned.Using thiskindof radio-tracking,the
re-searchershavetomovethrough theexperimentalarea witha
re-ceiverantennalookingforcollaredanimals.Therefore,data
collec-tionisinfrequentandlimitedtodaylighthoursortoresearch
op-eratinghours [9].Satellite localizationmechanismsare so
expen-sivethat only migratoryanimals wereused, asin[10].There are
recentstudies that have aimed at designing wireless sensor
net-worksthatarecapableofmeasuringspecificbehavioralparameters
andtransmittingthem over a wireless network toa central base
Table1
Qualitativestudybetweenrelevantworksinthearea.
Usedsensor Collecteddata Recognitionmethod Outputclasses Real-timeclassification
Ref.[16] 2-axisaccel. Online MLPANN 5 No
Ref.[17] GPS&3-axisaccel. Online Decisiontree 5 No
Ref.[18] 3-axisaccel. Offline Decisiontree 3 No
Thiswork 3-axisaccel. Online EmbeddedMLPANN 3 Yes
Fig.1. Networktopologyarchitecture.
two previous ones. Global positioning systems (GPS) is the most
popularsensorusedinoutdoorenvironmentstoestimatethe
tem-poralandspatialdistributionofanimals[1–3,8,9,12].Someofthese
studiesalsoinferanimalactivityfromGPStrackingdata[1–3].In
[2], the positionand acceleration obtainedfromthe GPS isused
toinferdifferentactivitystatesfromcattle.Inthisstudy,
discrimi-nantanalysisclassification agreed withhumanobservation forat
least 74% of the data while regression tree classification agreed
withhuman observation forat least 84% of the data.In [1], the
authorscompared theclassificationresultsfromhumanobservers
withthose obtainedfrom discriminant analysis of GPS data and
foundthat thetwo were in agreement for71%of the data.Both
papersclassify betweenthreedifferentbehaviors:grazing,
travel-lingandresting.Intheresearchcarriedoutin[3],thebehaviorof
a herd ofdairy cowsis classified usingthe animal tracking data
obtainedfromtheGPSintotwoclasses(activeandinactive)using
ak-meansclassifier.
WhenusingtheGPS sensorforanimalmonitoring,high
capac-itymemorycardsto store theinformationandlong life-batteries
areneededbecauseofthepowerconsumption,whichusually are
not lightweight.Therefore,high-power consumption andfrequent
loss ofconnection with thesatellites in theareas ofa field
cov-eredbyobstacles(e.g.,trees)arethemaindrawbacksofGPS-based
monitoringsystems.Inaddition,currentstudieshaveidentifiedthe
difficulty of balancing data resolution with technical limitations,
particularly the powerand memory requirementsof the
animal-attacheddevice[3,8].
The use of inertial sensors, like the accelerometer, gyroscope
and magnetometer, overcomes the disadvantages of GPS and
al-lowstoobtaininformationabouttheentirerangeoftheanimal’s
body movements [4,5,13,14].In [13] a body attitude (orientation)
estimationforfreeranginganimalsusinganInertialMeasurement
Unit(IMU) isdescribed. In [14]the authors placed offline
pitch-rollsensorsaroundtheneckofeachsheepinaherd.Thedatawas
analyzedusing threeclassificationmethods: a lineardiscriminant
analysis, a classification tree method, and a manually developed
decision tree consisting of four “if then” loops. All three
90% accuracy, distinguishing between two activity categories:
ac-tiveandinactive.
Regardless of the type of sensors used to monitor animals,
large amountsofdataareneededwhenstudyingtheirbehavioral
patterns,implyingimportantanalyticalandinterpretative stepsto
processtheinformation.Algorithmsthatlookforparticular
behav-ioral patterns based on the input data usually conduct this kind
ofrecognitionorclassification.Someofthesealgorithmsare
Neu-ral Networks(NN), SupportVectorMachines(SVM)oreven
com-plex statisticalmethods,whichcan detectspecific behaviorssuch
assleeping,running,copulating,etc. Generally,thecomputational
costsofsomeofthesealgorithmsarehighenoughtorequire
spe-cificplatforms capableofparallelizingcomputations forthis
clas-sification. Supervised neural networks, such asfeed-forward
net-works,areparticularlywellsuitedformodelingandcontrolling
dy-namicsystems,classifyingnoisydata,andpredictingfutureevents
[15].
In[16],a2.4-GHzZigBee-basedmobilead hocwirelesssensor
network to collect informationfromsheep andsend it to a base
stationispresented;and,also,amultilayerperceptron(MLP)based
artificialneuralnetwork(ANN)toobtainthecorresponding
behav-iorfromthegathereddatainanonlinewayisdescribed.The
accu-racyrateofthenetworkis76.2%(classifyingbetweenfivedifferent
classes:grazing,lyingdown,walking,standingandothers).
Inthiswork,weproposeahierarchicalwirelesssensornetwork
tocollectinformationaboutanimalsactivityusinglow-power
con-sumptionintelligentdevicesplacedonthemwhichcontaina
neu-ral network implementation to classify their behavior based on
sensoryinformation. Therefore,we propose an onlinemonitoring
system capableof real-time classification ofthe animal behavior.
The NNisdesignedandtrainedoffline usinga softwaretool and
then all of its trainingparameters andconfiguration areused on
anembeddedversionoftheNN,whichisimplementedona
low-powermicrocontroller.Themainnoveltyofthisworkwithrespect
torelatedstudiesliesonthein-collarbehaviorclassification.
Table1summarizesaqualitativestudybetweenthemost
rele-vantworksinthisareaandthiswork,comparingtheusedsensor,
suchasmethodsandfeatures,asreal-timeclassificationcapability.
As canbe seen,all worksuseanaccelerometer assensor, and
mostofthemcollectthesamplesonline,i.e.,itisnotnecessaryto
takeoff thedevicefromtheanimal,sincetheyaresentbywireless
network.Asrecognitionmethod,decisiontreeandMLPbasedANN
are commonly used because both are able to achieve a good hit
average, classifying between three or five classes in thesecases.
Real-timeclassificationisonlyachievedbythiswork,anditisthe
mainnoveltyincomparisonwiththeothers.
MINERVA is a research project whose main aim is to study
and classify wildlife behavior inside Doñana National Park [19].
Nowadays, trackingandclassificationsystems forwildlifeusedin
Doñana National Park obtain positional information using a GPS
andtransmitit viaGSM(bySMS).However, toreduce thepower
consumption,thepositionisobtainedbetweentwoandfivetimes
aday.Thesesolutionsarenotenoughforbiologistsinterests:they
needmoreinformationtorecognizeanimalbehaviors.Tosolvethis
lack of information,two solutions can be implemented: the
sys-temcanbeadaptedtotransmitinformationmoreregularly (since
communicationsconsumeinaveragemorethan80%ofbatterylife,
which makes thisoption inefficient); or,on the other hand, this
information canbe processed locallyin orderto classify the
ani-malbehavior andtransmit onlythebehavior itself.Therefore,
in-steadofsendingtheinformationaftereverysensorread,the
com-municationtothenetworkonlyoccursafterseveralsensorreads;
this fact increases battery life butkeeps the information of
ani-malbehaviors. Viabilityandpowerconsumptionstudies forthese
twoapproacheshavebeencarriedoutbytheauthorsin[20].This
projecthas theadditionalaimofdeveloping aninfrastructure for
Fig.2. Motedevicewithoutbattery.
collectingthisinformationandmake itaccessiblethroughthe
in-ternet.Thepatternrecognitionofthesenseddataisperformedin
realtime by the microcontroller usinga low-power
implementa-tionofaNNthatclassifiesthreedifferenthorsegaits[21]
(motion-less,walkingandtrotting).Thisinformationistransmittedusinga
meshwirelessmultisensory networkdistributedoncollarsplaced
onsome animals.Thismultisensory network readsdatafromthe
sensors andsends them to a network ofmotes, which actsas a
router andretransmits thesepackets toa base station.This base
stationreceives theinformationthroughthenetworkanduploads
it toa remote server database usingDoñana National Park’s
Wi-Ficonnection.Researcherscanaccessthisdatausingaweb-based
userinterfaceandtracktheanimalactivityanditslocationinreal
timewithoutthenecessityofbeinginDoñanaNationalPark[19].
Thepaperisstructuredasfollows:Section2presentsthe
wire-lesssensor network and its architecture. Section 3 describes the
collar device. Then, Section 4 presents the Fast Artificial
Neu-ral Network library. Section 5 describes the experiments that
have been carried out, the testing scenario and their results. In
Section 6, the authors discussthe results obtainedand previous
studiesrelatedwiththisandfutureworksusingthecurrentstate
of the projectas a starting point. Finally, Section 7 presents the
conclusions.
2. Networktopology
Themain aimofthenetwork istoobtain behavioral
informa-tion fromwildlife and store it in a remote database server. This
way,researcherscanaccessthisinformationthroughawebsitefor
furtherresearch andstudies. Theclassificationinformationis
col-lected and sent through the network by collars that are placed
ontheanimals andthatconsist ofseveralsensors,whilea setof
motestransmitittothebasestation,whichislocatedinthepark.
Dueto the factthat capturing awild animalto replaceits collar
isveryexpensive, thewholesystemisdesignedtohavethe
low-estpowerconsumption possible.Thatiswhythebehavioral
clas-sification is done in an embedded neural network on the collar,
transmittingonly the classification resultinstead ofthe obtained
information from each of the sensors that the collars have.The
studythattheauthorshavecarriedoutin[20]showsthatthedata
transmissionis,byfar,theactionthatconsumesmorebatterylife.
Inthisstudy,a2.4-GHzZigBee-based[22,23]wirelesssensor
net-workisused.Fig.1showstheWSNtopologyarchitecture.
ZigBeedefinesthreedifferentdevicetypes:Coordinator,Router
andEnd Device whichcorrespond with the onesthat have been
used in this network: base station, motes and collars,
respec-tively.The main goal ofthe basestation is to receivedata
pack-ets from the collars and retransmit them to a remote database
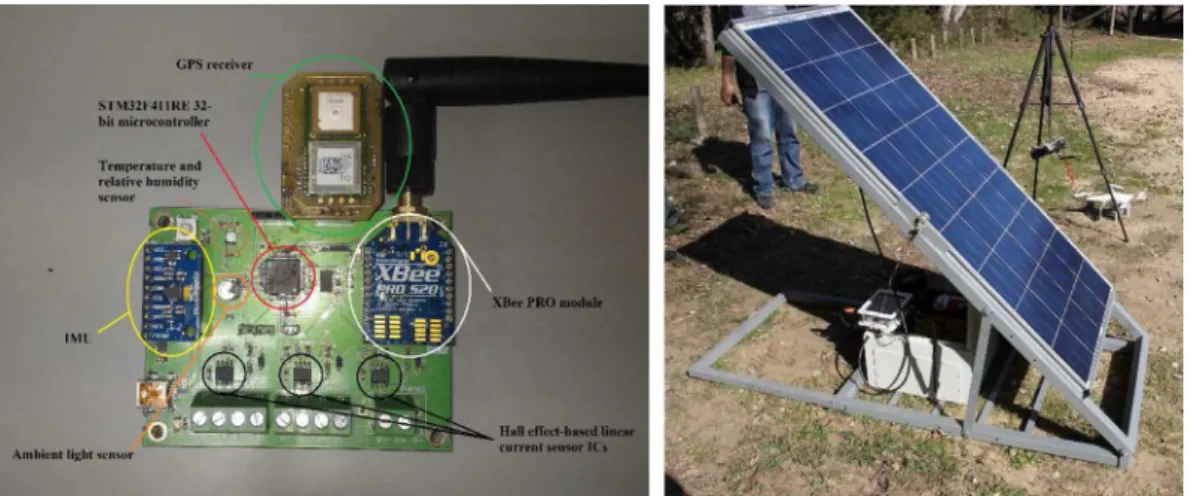
Fig.3. BridgeBoard(left)andbasestation(right).
the base station has other important functionalities, focused on
controllingparkenvironmentalconditions,liketemperatureor
hu-midity.This device consistsof severalelements, such asan Intel
NUCbarebone,1a 60Abatteryto powerthe system, a solarpanel
(1476×659×35mm)tochargethebatteryduringdaylightanda
printedcircuitboard(PCB)calledBridgeBoard whichcontains
dif-ferentsensors andtheXBee moduleto receivepackets from
col-lars andmotes. The battery, NUC and BridgeBoard are protected
byametallic waterproofbox,whichallowsto placethebase
sta-tionoutdoorswithoutanyrisk.Everythinghasbeenmountedona
dedicatedmetallicstructure designedtoavoidthe effectsofhard
weatherconditions.ThemotesareXBeedevicesconfiguredas
Zig-Beerouterswhich areplaced surrounding thebasestation. Their
maingoalis toexpand the coverage area andprovidea
commu-nicationspotbetweencollarsandthebasestationincasethatthe
collarsareoutofthecoveragerangeofthebasestation.Figs.2and
3show the mote device and the base station, respectively.
Althougheachdeviceinthisnetworkhasaveryimportantrole
intheMINERVAproject,inthisworkwewillfocusonthecollars,
whicharethemostrelevantonesintermsoftheclassification of
wildlifebehavior. More informationabout all theseelementscan
befoundin[20].
3. Collar
The collarcollects informationfromtheanimalon whichit is
placed by using different sensors. It has a MinIMU-9V2 inertial
measurementunit(IMU),whichconsistsofaLSM303DLHC3-axis
accelerometer, a L3GD20 3-axis gyroscope and a 3-axis
magne-tometer.An I2Cinterface accessesnine independent rotation,
ac-celeration,andmagneticmeasurementsthatcanbeusedto
calcu-latethesensor’sabsoluteorientation.Allofthesesensorshave
12-bitresolutionforamoreprecisedataacquisition.TheIMUisused
inadditiontoaGPS,whichprovideslocationandtimeinformation
inallweather conditions.Themainaimofthecollaris,usingthe
informationobtainedfromtheIMU,toclassifytheanimal’s
behav-ior(betweenthreedifferentgaitpatterns)usingthisdataasan
in-putforafeed-forwardneuralnetworkimplementedonthecollar’s
microcontrollerunit (MCU).The periodicalmeasures ofeach
sen-sorarecarriedoutusingalowpowermicrocontroller(STM32L152
[ref])withareal-time operatingsystem(RTOS)whichispowered
usingafourAAAbatterypack(1.5V,1155mAheach).
The collar prototype (see Fig. 4) has an XBee module (XBee
PRO S2B [6]) that can transmit data througha wireless network.
1http://www.intel.com/content/www/us/en/nuc/nuc-kit-d54250wykh.html.
Fig.4. Collardeviceprototype.
XBeemodules are integratedsolutions basedon ZigBee, whichis
anopenglobalstandardoftheIEEE802.15.4MAC/PHY[22,23].This
device family allows toimplement a meshnetwork of motes(or
routers)wherecollars(ordevices)sendinformation,andother
el-ements(coordinators) of the network redirectthese packets to a
web server.The mainobjective istotransmit sensedinformation
tothenearestrouterofthenetwork,sothatitcanreachthe
coor-dinatoranduploadthisinformationto thedatabaseserver.Ifthe
signalcannotreachavalidpointtotransmit,i.e.,theanimalisout
ofthenetwork coverage, thecollarcarriesa microSDcardwhere
the informationisstored, so that theanimal behavioral
informa-tioncanbe accessedlateroroffline,avoidingdataloss.Usingthe
XBee module the collarwill send the recognized gaits to a base
station that willupload this informationto a databaseserver on
theinternet.
Due tothe fact that capturinga semi-wild animalis very
ex-pensiveanddifficult,themicrocontrollerisabletoswitchtosleep
receivingthiscollar’sinformation,increasingbatterylife.Moreover,
themeasuresaretransmittedperiodicallyaccordingtoafrequency
value thatisestablishedandthat canbemodified,reducing radio
transmissionsandthus,reducingpowerconsumption.
4. FastArtificialNeuralNetworklibrary
ThemaingoalofprojectMINERVAistomonitorwildanimals,
getthe behaviorinformationbasedontheir activitylevels,which
are obtained fromthe sensors that are placed onthe collar that
wasdescribed inthe previous section, and then,send this
infor-mationtoadatabaseserverontheInternetforfurtherresearchby
Doñana’sbiologiststaff.Forthispurpose,aclassifiersystemneeds
tobeusedinordertopredictwhichoneofthestudiedbehaviors
(motionless,walkingandtrotting)istheanimalperformingbased
onthesensorinformation.Sinceneuralnetworksarepresently
of-feringbetteraccuraciesatsolvingtheseclassificationproblems,we
haveexplored their useinthisworkby embeddingthem intoan
embeddedsystem.
Theneuralnetworkhasbeendeployedinthecollar’s
microcon-troller usingtheFastArtificial NeuralNetworklibrary[24],which
isafreeopensourceneuralnetworklibrarythatimplements
mul-tilayerartificialneural networksinC programminglanguage. Itis
easy to use, well documented, versatile and allows to use both
floating point andfixedpoint numbers.It alsohas bindingswith
more than20 programminglanguages andseveralgraphicaluser
interfaces (GUIs), although in this paper the standard C library
withneitherwrappersnorGUIs isused.Fixedpoint numbersare
used in this work due to the microcontroller’s lack of Floating
PointUnit(FPU)becauseoflow-powerconsumptionrequirements.
Two different versions of the library are used in this work.
The first one is the full fixed point FANN library, which can be
downloaded from theGithub page ofthe project.This version is
used fortrainingthe neuralnetwork and,after thisstep, testthe
datasetwiththeconfigurationthathasbeenobtainedinthe
train-ingphase.ThiswholesimulationprocessisdoneinthePCjustfor
testinghowgoodtheclassificationresultswouldbebefore
deploy-ingtheneuralnetworkconfigurationonthemicrocontroller.
ThesecondversionoftheFANNlibrarythatwehaveused
cor-respondstoamodifiedversionwehaveperformed.Inthissecond
case,wehaveimprovedtheperformanceandremovedsomeparts
forpower saving,such as: training, floating pointoperations and
other non-necessary classesandfunctionalities when itcomes to
obtaining theclassification results.Thissecond version fitsinthe
collar’s microcontroller. The reasons why the training
functional-ityhasbeenremovedfromthevanillaversionoftheFANNlibrary
are:(1)themicrocontrollerhaslimitedprocessingcapabilitiesand
memory;(2)thecomputationalcostofthetrainingstep(which
re-ducesbatterylife);and(3)the trainingprocesswillstill be done
in thePCdueto thefact that, forthispurpose,thetrainingstep
doesnotneedtobedoneinthecollar.
In general, tests (which will be detailed in the next section)
wereperformedusingamulti-layerperceptronfeedforwardneural
network[15].ThiskindofNNisthestandardalgorithminpattern
recognitiontasks, trainedbya backpropagationalgorithm.It
con-sistsof threeormorelayers:an inputlayer, an outputlayer, and
oneormorehiddenlayers.Inthiswork,aninputlayerwiththree,
six ornine inputs (dependingon the data setused), one hidden
layerwithten,twentyorthirtyneurons(toseeifitimproves)and
an output layer withthree neurons(it always hasthree outputs,
oneper gait)wasimplemented,trainedandtestedusingthedata
collectedinDoñana.
TheFANNlibraryallowstochoosebetweendifferentactivation
functions: linear, threshold, threshold symmetric, sigmoid
step-wise, sigmoid symmetric stepwise, linear piece and linear
sym-metric piece [25].However, in thiswork, we haveused Sigmoid
SymmetricStepwiseduetothefactthatitisthesameastheone
that weused inthe experimentsthat were carriedout in [5], so
thattheresultscanbe comparedusingexactlythesamenetwork
architecture. This activation function gives an output that is
be-tween−1and1.Itisastepwiselinearapproximationtosymmetric
sigmoidandfasterthansymmetricsigmoid,buta bitlessprecise.
Fortraining, FANN supports a set of trainingalgorithms, but the
defaultandmostusedoneisthebackpropagationalgorithm[26].
Initialization algorithms, such as the Nguyen–Widrow [27], have
notbeenusedinthisworkduetotheinitializationprocessbeing
providedbytheFANNlibrary.However,goodresultswereobtained
inthefirsttests, sothisstepwillnotbeconsidered inthefuture.
Someparameterslikethemeansquarederror(MSE)andthe
num-berofepochscanbeconfiguredtoimprovetheresultingaccuracy,
andtheywillbesetexperimentallyastestswillbeperformed.
5. Experimentalresultsandcomparison
In this section, we present the experimental results obtained
from the classification system using the FANN library, varying
both the number of neurons in the hidden layer and the input
dataset between raw (unprocessed) and different filtered sensor
data.Thesetestswereperformedinthreedifferenttesting
scenar-ios:(1)trainingandtestingtheNNusingthefullFANNlibraryon
thePC,(2)trainingtheNNonthePCusingthesame libraryand
testingit on the embedded version of the FANN library running
insidethecollar,and(3)usingthesametrainingparametersthat
wereobtainedinpreviousexperimentsandtestingthenetworkon
adifferentrealscenario(thecollarsareplacedondifferenthorses
and, after the experiment is done, the average accuracy ratio is
calculated).Acomparative studyoftheperformance betweenthe
FANNlibraryandapreviousworkperformedbytheauthorsin[5],
inwhich we usedthe MatlabNeuralNetworkToolbox for
classi-fyingbetweenthesamethree horsegaitsthat areintentedtobe
classifiedin the presentstudy, was conductedin order to
deter-minewhichlibrarybehavesbetterusingthesameNNarchitecture,
traininganddatasets.
5.1. Simulationtests
Thefirst partofthisstudyis totrainthe classifiersystem
us-ingthe FANNlibraryandto performseveralsimulationtests,
us-ingbothaPCandacollar(whichisnotplacedinahorse),where
the same NN architectures are implemented. These architectures
areMPL-basedfeed-forwardNNswiththreelayers:theinputlayer,
onehiddenlayerandtheoutput layer.Theinputlayercontains3,
6or9neurons(dependingonwhichsensorsareusedfromthe
in-putdataset),andthenumberofneuronsinthehiddenlayerisset
to 10,20 or30 neurons.The output layerconsists of3 neurons,
corresponding tothethree behaviorstobe classified(motionless,
walking andtrotting). The transfer function used is the Sigmoid
SymmetricStepwise,assaidintheprevioussection.
Totrain theNN,thewidelyused backpropagationalgorithmis
used, as it is the default training mechanism that FANN
imple-ments,whichalso isthesamethat wasusedin theMatlab
Neu-ral Network Toolboxin the previous work [5]. The length of the
whole dataset for both the training andthe test is 30,000
sam-ples,whichwere obtainedduringdifferentvisitstoDoñana’s
Na-tionalPark fromthe IMU sensors inside thecollar whilea horse
performedthreedifferentbehaviors:motionless,walkingand
trot-ting.ThesensorsdescribedinSection3gathereddataevery33ms,
sothesamplingfrequencyis30Hz.Thedatawasobtainedat
dif-ferentseasonsoftheyearbetweenwhichtheweather conditions
weredefinitelynotthesame.Thehorsesusedforthecollectionof
datahadapproximatelythesamecharacteristicsintermsofheight,
Table2
HitratepercentagesusingthefullversionoftheFANNlibraryandunprocessed(raw)sensordataasinput. Neuronsinhiddenlayer Classes Sensorsused
Acceler.(%) Gyro.(%) Magnet.(%) A&G&M(%) A&G(%)
10 Trotting 75.58 49.6 55.74 77.04 74.62 Motionless 81.98 69.26 55.40 82.54 83.16 Walking 81.12 54.46 66.14 82.34 81.58 Average 79.56 57.79 59.12 80.64 79.79 20 Trotting 75.00 53.18 58.08 76.68 74.98 Motionless 81.34 69.62 58.50 86.44 86.62 Walking 80.38 56.12 67.70 82.36 81.98 Average 78.91 59.64 61.43 81.83 81.19 30 Trotting 75.84 53.48 58.42 76.32 74.74 Motionless 81.52 70.18 58.64 87.50 86.42 Walking 80.30 56.98 68.30 82.50 81.68 Average 79.22 60.21 61.79 82.11 80.95 Table3
HitratepercentagesusingthefullversionoftheFANNlibraryand fil-teredsensordataasinput.
Neuronsinhiddenlayer Classes Appliedfilter
Kalman(%) FreeIMU(%) 10 Trotting 88.84 61.54 Motionless 97.32 53.04 Walking 99.98 63.00 Average 95.38 59.19 20 Trotting 89.67 62.74 Motionless 96.59 57.90 Walking 99.99 66.92 Average 95.42 62.52
sets;the followingcross-correlationscheme isusedforevery
ex-perimentinthiswork:70%fortraining,15%forvalidationand15%
fortestingthenetwork.
5.1.1. UsingthefullversionoftheFANNlibrary
The first performance test used theraw sensordata, thusthe
NNhasthree,sixornineinputs(x,yandzforeach3-axissensor
oftheIMU).ToevaluatetheimportanceofeachIMUsensorwhen
itcomestorecognizinganimalbehaviors,theNNwastrainedand
testedwithdifferentcombinationsofthesesensors. Ontheother
hand,forthe second performance test,KalmanandFreeIMU
pre-processing algorithms were used. These samples were obtained
when applyingKalman and FreeIMUfilters to the accelerometer,
gyroscopeandmagnetometerrawdatainreal-timewhenthe
col-larMCUcollectedthisinformation[28].Inthiscase,threeneurons
areused intheinput layer oftheNN(these algorithms obtained
threevalues:pitch,rollandyawfromtheIMUsensors).10,20and
30neuronswereusedinthehiddenlayerinbothexperiments.
For each NN architecture that has been presented, several
training-testing steps were performed to calculate the results in
terms of average accuracy ratio. The results of these tests using
bothsensorrawdata (unprocessed)andKalman andFreeIMU
fil-tersarepresentedinTable2andTable3,respectively.
The results that can be seen in Table 2 show that the
ac-celerometeris thesensorthat has themostvaluable information
aboutthehorsemovement,whilethegyroscopeand
magnetome-terimprovethepatterndefinition.Theclassifiersystemhasan
ac-curacyof82.11%using30neuronsinthehiddenlayer.InTable3,
thehitrateofourclassificationsystemusingKalmanfiltereddata
isaround95.4%regardlessofthenumberofneuronsinthehidden
layer.
5.1.2. UsingtheembeddedversionoftheFANNlibrary
Theaimofthistestistodetermineiftheperformancefor
run-ningthe embeddedversion of the FANNlibrary inside thecollar
differsfromrunningthefullversionoftheFANNlibraryina
com-puter.Forthispurpose,thesameexperimentsthatwereperformed
inthe previous subsectionwere carriedout usingthislibrary
in-sidethecollar.
TheNNwastrainedinacomputer and,afterthat,theweights
oftheconnectionsandtherestofthetrainingparametersthatare
necessary to create the NN were generated and implemented in
thecollar.
Ascanbeseeninprevioustests,foreacharchitecturethathas
been presented, severaltraining-testing steps were performed to
calculatetheresultsintermsofaverageaccuracyratio.Thecollar
wasnotplacedontheanimal.Theresultsofthesetestsusingboth
raw sensor data (unprocessed) and Kalman andFreeIMU filtered
dataarepresentedinTable4andTable5,respectively.
FromTable4,theseresultsshowthat theaccelerometeristhe
sensorwithbetter informationaboutthehorsemovement, while
the gyroscopeand magnetometer improvethe patterndefinition.
Theclassifiersystemhasanaccuracyof82.41%with30neuronsin
the hiddenlayer.In Table5, thehit rateobtainedby the NN
us-ingKalmanfiltereddatais95.39%using20neuronsinthehidden
layer,which isalmostthe sameasthe oneobtainedwhentested
with10neurons.
5.2. Realtest
Afterthesimulationswereperformed,thenextstepwastotest
theembedded NNimplementationintothe collarplacing iton a
horseandobtainingclassificationresultsinreal-time.By
perform-ing this test,we can obtain thehit rateaccuracy ofthe NN and
comparetheseresultswiththe onesobtainedonthe simulations
thatwereperformedintheprevioussubsection.
Forthistest, thesameNNarchitecturesweretrainedand
em-bedded into a collar. These architectures were MPL-based
feed-forward NNs with also three layers: the input layer, one hidden
layerandtheoutputlayer.Theinputlayercontains3or9neurons
(depending onwhich sensors were usedfromthe input dataset),
and the number of neurons in the hidden layer is fixed to 10.
Theoutputlayerconsistsof3neurons,correspondingtothethree
horsegaitstobeclassified(motionless,walkingandtrotting).The
transferfunctionusedistheSigmoidSymmetricStepwise,assaid
intheprevioussection.
The resultsobtainedinsimulation testsshowthat there isno
greatdifference whenbetweenusing10,20or30neuronsinthe
hiddenlayer,intermsofaveragehitrate.Forthisreason,ahidden
Table4
HitratepercentagesusingtheembeddedversionoftheFANNlibraryandunprocessedsensordataasinput. Neuronsinhiddenlayer Classes Sensorsused
Acceler.(%) Gyro.(%) Magnet.(%) A&G&M(%) A&G(%)
10 Trotting 75.37 23.77 55.31 77.92 75.52 Motionless 88.70 58.72 59.40 87.76 86.70 Walking 76.62 81.71 68.03 77.52 79.15 Average 80.23 54.73 60.91 81.07 80.46 20 Trotting 74.01 34.86 58.23 79.48 77.40 Motionless 89.65 57.02 58.45 84.86 85.69 Walking 77.59 78.29 68.80 80.46 81.65 Average 80.42 56.72 61.83 81.72 81.58 30 Trotting 75.45 35.66 58.06 77.64 77.76 Motionless 89.31 57.23 59.13 86.80 87.70 Walking 77.55 78.04 68.38 82.81 80.48 Average 80.77 56.98 61.86 82.41 81.98 Table5
HitratepercentagesusingtheembeddedversionoftheFANNlibraryand filteredsensordataasinput.
Neuronsinhiddenlayer Classes Appliedfilter
Kalman(%) FreeIMU(%) 10 Trotting 98.56 58.01 Motionless 83.86 53.47 Walking 99.99 64.13 Average 94.14 58.54 20 Trotting 89.46 62.12 Motionless 96.72 57.80 Walking 100 67.81 Average 95.39 62.57
Fig.5. Horseusedforrealtests.
reduce calculations. The datasets collectedby the sensors, which
wereusedasinputtotheNN, wereaccelerometer,
accelerometer-gyroscope-magnetometerandtheoutputofareal-timeKalman
fil-ter.
To train the NN, datasets used in the previous section were
used, where the length of the whole dataset for both the
train-ing andthetestare 30,000samples.Thesamples wererandomly
dividedintothreesets;thefollowingcross-correlationschemewas
used forevery experimentinthiswork: 70%fortraining, 15%for
validationand15%fortestingthe network.Thecollarwasplaced
closetothejawofthehorse,ascanbeseeninFig.5.
Thehorsethatwasusedinthistestbelongstoadifferentbreed
from that of the horses used to collect data for performing the
simulationtestsandtrainingtheNN.
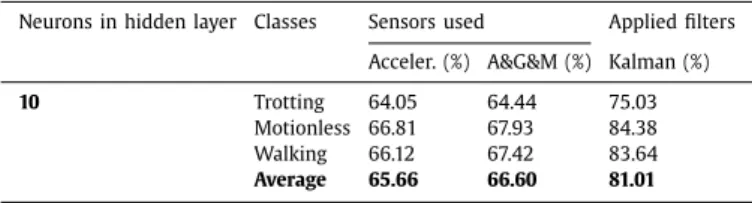
Table6
Hitratevaluesobtainedintherealscenario.
Neuronsinhiddenlayer Classes Sensorsused Appliedfilters Acceler.(%) A&G&M(%) Kalman(%)
10 Trotting 64.05 64.44 75.03
Motionless 66.81 67.93 84.38 Walking 66.12 67.42 83.64
Average 65.66 66.60 81.01
OncetheNNwastrainedinthePCbyusingtheFANNlibrary,
connections’weightswereobtainedandloadedintothecollar,
al-lowingto perform thetest, where thehorsewas performing the
three gaits to be classified (motionless, walking and trotting) in
real-time. The results of these tests using both raw sensor data
(unprocessed)andKalmanfiltereddataarepresentedinTable6.
Theresultsobtainedinthesetestsshowthatthehitratevalues
areabout15%lowerthantheonesachievedinthesimulation.The
bestaccuracyvalueobtainedbytheNNwasusingKalmanfiltered
dataasinput,witha hitratepercentageof81.01%, whereasusing
RAWdataonlyachieved66.60%inthebestcase.
5.3.Comparativestudyoftheobtainedresults
The results that were obtained from the NN simulation on
the PC using the full FANN library and fromthe NN simulation
on the collar using the embedded version of the FANN library
(Sections5.1.1and5.1.2)showthatthereisnodifferencebetween
thesetwo approachesintermsofaccuracyratio.Theresultsfrom
thesetwo simulations were compared by calculating the average
difference ofthe hit ratepercentagevaluesconsidering every
ar-chitectureandcasepresentedinthecorrespondingtables.The
cal-culatedaverageaccuracypercentagedifferenceis1.00473684%and
thetypical deviationis 1.03962797%,provingthat, withthe same
inputdataset,theresultsobtainedinthePCandinthecollarare
practicallythesame.
Comparingthesesimulations withtheonesthat weredone in
apreviousworkusingtheMatlabNeuralNetworkToolbox[5]and
the same input dataset, it can be seen that the results obtained
withFANNhardlydifferfromthem.Therefore,itcanbeconcluded
that FANN library can, at least, obtain the same performance as
theMatlabNeuralNetworkTookbox andthus itcould be a good
chance.
Since the real test was performed with a horse from a
dif-ferent breed than that of the ones that had been used to train
thenetwork,worseaccuracyresultswereexpected.However,even
inthiscase, the NNachieves81.01% hit ratewhenusing Kalman
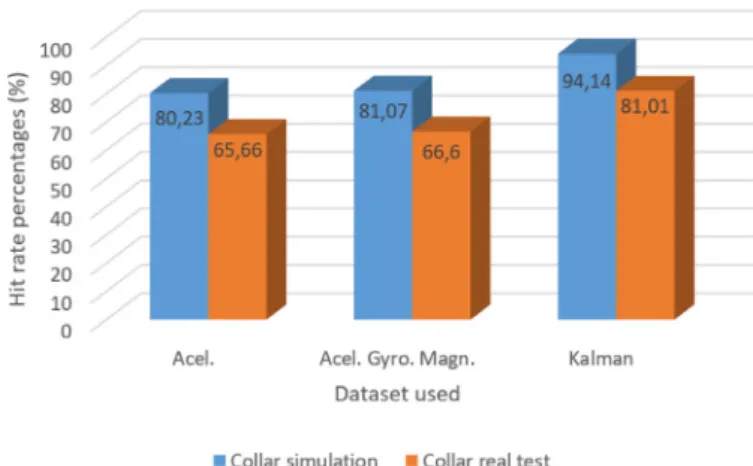
Fig.6. Hitratecomparisonbetweentherealtestandthesimulationsperformedin thecollar.
on the collar, but still a very decent accuracy ratio. Using the
accelerometerandall theIMU sensors asinput,the NNachieved
15%lessaccuracy but, inthesecases, 65.66%and 64.60%are not
considered to be good values when it comes to monitoring
ani-mals.Fig.6presentsabargraphdisplayingthehitratesfromthe
simulationsdoneinthecollarandtherealtestperformedwiththe
horse.
As isdescribedbefore,itmakessense thattherealtest
exper-imentsobtained worse classification results,due to the fact that
thehorseinwhichthesetestswereperformedisfromadifferent
breedthanthatoftheonesthatwereusedtotraintheNN.
6. Discussion
The comparison between the classification results obtained
fromthesimulationoftheembeddedversionoftheFANNlibrary
inthecollarandtheonesobtainedfromthesimulationofthefull
FANNlibraryonthePCshowsthatdeployingaNNinthedevices
that are pltor wildlife (capturing a wild or semi-wild animal to
changethebatteryfromitscollarisadifficultandexpensivetask).
Thisapproachisanoveltyanditisnotconsideredintheprevious
studiesthathavebeendiscussedinthismanuscript.Theseresults
areverysimilartotheonesobtainedin[5],inwhichtheauthors
carried out different simulations on a PC with the same NN
ar-chitecacedonanimalsisnotonlyviable,butalsothebestsolution
in terms of power consumption [20], which is a very important
factwhenitcomes tomonituringandpreprocessingstepsonthe
datainputastheonesthathavebeendoneinthismanuscriptbut
usingtheNeuralNetworkToolboxfromMatlab.Therefore,forthis
purpose,theperformance ofthe developedembedded version of
theFANN libraryproves tobe asgood interms ofresults asthe
MatlabToolbox or even the full version of the library, but
over-comingtwo main disadvantages: (1)it can be implemented and
deployedon a MCU and(2) it is optimized for low-power
con-sumption.
Theresultsobtainedfromtherealtestsinwhichthecollarwas
placedonahorsewerearound14%lessaccuratethantheones
ob-tainedinthesimulations.Thisisnotcausedbytheperformanceof
theNNbutby twofacts:(1)thehorseinwhichthesetestswere
performedisfroma completelydifferentbreed thanthatofused
to train the NN, and(2) a slightchange on the collar’s position
while placing it on the horse makes the inertial sensors gather
completelydifferentvalues,whichaffectstheclassificationresults.
In the near future, the authors will focus on solving these two
issues.The first one can be solved by trainingthe network with
more data from different horse breeds.We have already started
workingon solvingthesecond issue,studyingthebest placeand
Table7
Hitaverageobtained.
Recognitionmethod Classifiedclasses Hitaverage(%)
Ref.[16] MLPbasedANN 5 76.2
Ref.[17] Decisiontree 5 85.5
Ref.[18] Decisiontree 3 82.2
Thiswork MLPbasedembeddedANN 3 81.1
waytopositionthecollarandusingtimewindowstocalculatethe
differenceproducedinthesensorinformation.Usingthis
informa-tion instead of the raw data obtained by the inertial sensors as
inputtotheNNreducestheerrorsthatarecausedbytheposition
ofthecollar.
Even though several problems happened in the real test, the
classification system with an embedded ANN presented in this
worknotonlyimprovestheresultsobtainedinotherrelatedworks
quoted inSection1(introduction),ascanbe seeninTable 7,but
itperformstheclassificationinrealtime.
Focusingonthecommunicationsnetwork,previousworkshave
used wireless sensor networks [4,7,9,11,13,16], but none of them
have implemented the embedded sensor systems placed on the
animalsasenddevices.Withthisconfiguration,thesedevicesonly
communicatewiththerestofthenetworkwhentransmittingthe
gathered information instead of also working as routers
(receiv-ing information from other devices and retransmitting them to
thenexthopofthenetwork).Thissolutiondramaticallyincreases
batterylife [20],which isan importantfactorinanimal
monitor-ingsystemsthatprevious workshavenot takenintoaccount(not
usinglow-power consumption devicesorenergy-harvesting
tech-niques).
Classificationresultsareobtainedinreal-timeandstoredinan
onlinedatabaseserverwheretheinformationcan beaccessed by
researchers,biologistsandother staff members fromDoñana
Na-tionalPark.
In [4], over-the-air programming(OTAP) is used to adaptively
modifythenetworksamplingrate.Thismechanismhasagreat
po-tential and will be definitely considered in future works, where
it could be used to modify the ANN training configuration and
connection weights withnewparameters that improve the
accu-racyoftheclassificationorevenallowingtoclassifynewbehaviors
that arenot trainedyetin thecurrentdevelopmentstatusofthe
project. 7. Conclusions
Inthiswork,weproposeanembeddedMLP-basedANNsystem
placed on semi-wild animals to classify their behavior using the
informationcollectedby inertialsensors.Forthispurpose,several
experimentshavebeencarried outto testthe classification
accu-racy of three differenthorse gaits(motionless, walkingand
trot-ting) usingdifferentNNarchitectures, inputdata and
preprocess-ing algorithms.The resultshavebeenobtainedfroma simulation
onthePCusingtheFANNlibrary,froma simulationonthecollar
usinga lightandembeddedversion oftheFANN librarythathas
beendeveloped bythe authorsandfromrealexperimentswhere
the collar wasplaced in different horses. Deploying a NN on an
embeddeddevice foranimalmonitoring inrealtime isa novelty
and it had not been done so far for this purpose. The in-collar
classificationreducesthenumberoftransmissionsinthe
commu-nication,whichgreatlyincreasesbatterylife,ashasbeenstatedin
previousworksbytheauthors.Inaddition,theuseofANNsmakes
itpossibletohavemoreadaptableandconfigurablesystems,since
only the weight matrix should be changed for adapting the
col-lartobe used withother speciesordetecting newgaits.
problematicanddependanton thedataset), whilean ANNpicks
upthethresholdautomatically.
TheresultsobtainedinthesimulationtestsshowthattheFANN
library(boththefullandtheembeddedversions)achievedagreat
hit rate percentage, obtaining around 82% inthe best casewhen
the raw dataset was used, and 95% when filtered sensor data
was used. The hit rate difference of these two simulations was
calculated, obtaining an average of 1.0047% (typical deviation of
1.0396%). Theseresults were comparedwiththe simulations that
wereperformedbytheauthorsinapreviousworkusingthe
Mat-labNeuralNetworkToolbox,showingthat,intermsofaccuracy
ra-tio,thereisnodifferencebetweenusingthesetwoapproaches.
The results obtained from a real test where the collar with
the embedded NN implementation was placed on a horse show
a decreaseofapproximately15%inthehit ratefromwhat itwas
expected afterthe simulations.This decreasecould be caused by
the factthat the horseusedto performthistest wasfroma
dif-ferent breed than that of used to train the NN. Also, other
ex-ternal factors, like the collar’s position on the horse, could be
critical to the performance of the behavior classification system.
Verygoodresultswereobtainedwhensimulationstestswere
per-formed(82.41%usingaccelerometer,gyroscopeandmagnetometer
as input; and95.39% usingKalman filtered data asinput).These
resultswill betakenintoaccount asa referenceforfuture works
where the collarpositioning system andthe NN trainingwill be
improvedtoobtainbetterresultsinrealtimescenarios.
Acknowledgments
This work wassupported by the excellence project from
An-dalusia Council MINERVA (P12-TIC-1300). The authors wouldlike
to thank RocíoBenitez fromClub Hípico“La Alegría’’ for helping
usontheexperimentsthatweredonewithherhorsesandRamon
C. Soriguer,FranciscoCarro,FranciscoQuirósandtheEBD-CSICfor
theirsupportontheteststhatweredoneinDoñanaNationalPark.
References
[1]E.Schlecht,C.Hülsebusch,F.Mahler,K.Becker,Theuseofdifferentially cor-rectedglobalpositioningsystemtomonitoractivitiesofcattleatpasture,Appl. Anim.Behav.Sci.85(3)(2004)185–202.
[2]E.D.Ungar,Z.Henkin,M.Gutman,A.Dolev,A.Genizi,D.Ganskopp,Inference ofanimalactivityfromGPScollardataonfree-rangingcattle,Rangel.Ecol. Manag.58(3)(2005)256–266.
[3]M.Schwager,D.M.Anderson,Z.Butler,D.Rus,Robustclassificationofanimal trackingdata,Comput.Electr.Agric.56(1)(2007)46–59.
[4]E.S. Nadimi,R.N. Jørgensen,V.Blanes-Vidal, S.Christensen, Monitoringand classifyingthebehaviorofaherdofsheepusingadhocwirelesssensor net-worksandartificialintelligence,in:ProceedingoftheSeventhWorldCongress onComputersinAgriculture,AmericanSocietyofAgriculturalandBiological Engineers,Reno,Nevada,2009,p.1.
[5]E.Cerezuela-Escudero,A.Rios-Navarro,J.P.Dominguez-Morales,R.Tapiador– Morales,D.Gutierrez-Galan,C.Martín-Cañal,A.Linares-Barranco, Performance evaluationofneuralnetworksforanimalbehaviorsclassification:horsegaits casestudy,in:ProceedingoftheThirtiethInternationalConferenceDistributed ComputingandArtificialIntelligence,Springer,2016,pp.377–385.
[6]M. Dominguez-Morales, A. Jimenez-Fernandez, D. Cascado-Caballero, A. Linares-Barranco, R. Paz, G. Jimenez-Moreno, R. Soriguer, Technical vi-ability study for behavioral monitoring of wildlifeanimals inDoñana: an 802.15.4coveragestudyinanaturalpark,in:ProceedingsoftheInternational ConferenceonDataCommunicationNetworking(DCNET),IEEE,2011,pp.1–4.
[7] E.S.Nadimi,H.T.Søgaard,T.Bak,ZigBee-basedwirelesssensornetworksfor classifyingthebehaviourofaherdofanimalsusingclassificationtrees,Biosyst. Eng.100(2)(2008)167–176.
[8] D.Anderson, Virtualfencing– a conceptintoreality,in:G.J.Bishop-Hurley (Ed.),ProceedingsoftheSpatialGrazingBehaviorWorkshop,2006,pp.61–91. [9] P.Juang,H.Oki,Y.Wang,M.Martonosi,L.S.Peh,D.Rubenstein, Energy-effi-cientcomputingforwildlifetracking:designtradeoffsandearlyexperiences withZebraNet,in:ACMSigplanNotices,37,ACM,2002,pp.96–107. [10] L.D.Mech,S.M.Barber,ACritiqueofWildliferadio-TrackingandItsUsein
Na-tionalParks,COTechnicalReport,BiologicalResourcesManagementDivision, USNationalParkService,FortCollins,2002.
[11]E.S.Nadimi,H.Søgaard,T.Bak,F.W.Oudshoorn,ZigBee-basedwirelesssensor networksformonitoringanimalpresenceandpasturetimeinastripofnew grass,Comput.Electr.Agric.61(2)(2008)79–87.
[12] Z.Butler,P.Corke,R.Peterson,D.Rus,Virtualfencesforcontrollingcows,in: Proceedingsofthe 2004IEEEInternationalConferenceon Roboticsand Au-tomation,ICRA’04,5,IEEE,2004,pp.4429–4436.
[13] H.Fourati,N.Manamanni,L.Afilal,Y.Handrich,Postureandbodyacceleration trackingbyinertialandmagneticsensing:applicationinbehavioralanalysisof free-ranginganimals,Biomed.SignalProcess.Control6(1)(2011)94–104. [14] C.Umstatter,A.Waterhouse,J.Holland,Anautomatedmethodofsimple
be-haviorclassificationasatoolformanagementimprovementinextensive sys-tems,in:ProceedingoftheFourthInternationalWorkshoponSmartSensors inLivestockMonitoring,2006,pp.57–58.
[15] C.M.Bishop,NeuralNetworksforPatternRecognition,OxfordUniversityPress, 1995.
[16] E.S.Nadimi, R.N. Jørgensen, V.Blanes-Vidal,S. Christensen, Monitoringand classifyinganimalbehaviorusingZigBee-basedmobileadhocwireless sen-sornetworksandartificialneuralnetworks,Comput.Electr.Agric.82(2012) 44–54.
[17]L.González,G.Bishop-Hurley,R.N.Handcock,C. Crossman, Behavioral classifi-cationofdatafromcollarscontainingmotionsensorsingrazingcattle, Com-put.Electr.Agric.110(2015)91–102.
[18] J.A.V. Diosdado, Z.E. Barker, H.R. Hodges, J.R. Amory, D.P. Croft, N.J. Bell, E.A.Codling,Classification ofbehaviourinhouseddairycowsusingan ac-celerometer-basedactivitymonitoringsystem,Anim.Biotelem.3(1)(2015)15. [19] Doñana NationalPark,http://whc.unesco.org/en/list/685,(accessed:
2017-02-04).
[20]J.Dominguez-Morales,A.Rios-Navarro,M.Dominguez-Morales,R.Tapiador– Morales, D. Gutierrez-Galan, D. Cascado-Caballero, A. Jimenez-Fernandez, A. Linares-Barranco,Wirelesssensornetworkforwildlifetrackingand behav-iorclassification ofanimalsinDoñana,IEEE Commun.Lett.20 (12)(2016) 2534–2537.
[21]S.E.Harris,HorseGaits,BalanceandMovement,MaxwellMacmillanCanada, 1993.ISBN0-87605-955-8.
[22]IEEE802WorkingGroup,etal.,IEEEStandardforLocalandmetropolitanarea networks– Part15.4:Low-RateWirelessPersonalAreaNetworks.Amendment 1:MACsublayer,IEEEStd802,2011.4–2011.
[23]IEEE802WorkingGroup,etal.,IEEEStandardforLocalandmetropolitanarea networks-Part15.4:Low-RateWirelessPersonalAreaNetworks.Amendment 2:ActiveRadioFrequencyIdentification(RFID)SystemPhysicalLayer(PHY), in:IEEEStd,802,2011,pp.4–2011.
[24]S.Nissen,ImplementationofaFastArtificialNeuralNetworklibrary(FANN), in:Report, 31,Department ofComputerScience, UniversityofCopenhagen (DIKU),2003,p.29.
[25]P.Sibi,S.A.Jones,P.Siddarth,Analysisofdifferentactivationfunctionsusing backpropagationneuralnetworks,J.Theor.Appl.Inf.Technol.47(3)(2013) 1264–1268.
[26]M.K.S.Alsmadi,K.B.Omar,S.A.Noah,etal.,Backpropagationalgorithm:the bestalgorithmamongthemulti-layerperceptronalgorithm,Int.J.Comput.Sci. Netw.Secur.9(4)(2009)378–383.
[27]D.Nguyen,B.Widrow,Improvingthe learningspeedof2-layerneural net-worksbychoosinginitialvaluesoftheadaptiveweights,in:Proceedingof the1990IJCNNInternationalJointConferenceonNeuralNetworks,1990,IEEE, 1990,pp.21–26.
[28]R. Tapiador-Morales, A. Rios-Navarro, A.Jimenez-Fernandez, J. Dominguez– Morales,A.Linares-Barranco,Systembasedoninertialsensorsforbehavioral monitoringofwildlife,in:Proceedingofthe 2015 InternationalConference onComputer,InformationandTelecommunicationSystems(CITS),IEEE,2015, pp.1–4.