ABSTRACT
SHIN, SEUNG JUN. New Techniques for High-Dimensional and Complex Data Analysis Based on Weighted Learning. (Under the direction of Yichao Wu and Hao Helen Zhang.)
We develop new statistical tools for high-dimensional and complex data which have
been very common in many applications. The thesis consists of four topics and a common
thread which links all the inter-related topics is weighted learning.
In the first two chapters, we establish the joint piecewise linearity of two popular
kernel machines, the weighted support vector machine (WSVM) and the kernel quantile
regression (KQR), which possess additional parameters besides the regularization
param-eter, a weight parameter and a quantile paramparam-eter, respectively. In Chapter two, joint
piecewise linearity of the WSVM solution is established and then an associated algorithm which efficiently computes entire solution surfaces of the WSVM is proposed. In Chapter
three, a piecewise linear conditional survival function estimator is proposed based on the
two-dimensional solution surfaces of the censored kernel quantile regression which can be
viewed as a special case of the weighted KQR.
In the remaining two chapters, we study sufficient dimension reduction (SDR) in
bi-nary classification. While SDR has been extensively explored in the context of regression
with continuous response, SDR in binary classification where most of existing SDR
meth-ods suffer has not been thoroughly researched. We propose two novel SDR estimation
methods in the context of binary classification. In Chapter four, a probability-enhanced SDR scheme is proposed. The key idea is to slice data based on the conditional class
probability rather than the binary response. Such a probability-based slicing can be
con-veniently done by solving a sequence of WSVMs. In Chapter five, we develop a weighted
principal support vector machine (WPSVM) for SDR in binary classification by
extend-ing the idea of the principal support vector machine (PSVM) recently developed by Li
et al. (2011) in the context of regression. The proposed WPSVM successfully achieves
SDR with binary responses and can handle both linear and nonlinear SDR in a unified
©Copyright 2013 by Seung Jun Shin
New Techniques for High-Dimensional and Complex Data Analysis Based on Weighted Learning
by Seung Jun Shin
A dissertation submitted to the Graduate Faculty of North Carolina State University
in partial fulfillment of the requirements for the Degree of
Doctor of Philosophy
Statistics
Raleigh, North Carolina
2013
APPROVED BY:
Leonardo A. Stefanski Hua Zhou
Yichao Wu
Co-chair of Advisory Committee
Hao Helen Zhang
DEDICATION
BIOGRAPHY
Seung Jun Shin is from a beautiful city of Busan, the largest costal city in South Korea.
After graduate high school in 2000, he left his hometown to attend Korea University in
Seoul, the capital of South Korea where he earned a Bachelor degree in statistics with
economics.
He then joined Master program at Korea university and continued to study more
advanced topics in statistics. Under the direction of Dr. Myoungshic Jhun, Seung Jun was involved in three projects which mainly focussed on bootstrap and nonparametric
function estimation. After the completion of Master degree, he worked as a research
as-sociate at Institute of Statistics, Korea University and a part time lecturer at Sookmyung
Women’s University in South Korea.
In 2008, Seung Jun left Korea to pursue Ph.D. degree in statistics at North Carolina
State University in Raleigh, North Carolina. He has been motivated much of his research
in high-dimensional data analysis. His general research interest includes kernel machine,
dimension reduction, model selection, nonparametric function estimation and bootstrap.
Toward his PhD degree, he has been developed new techniques for high-dimensional and complex data analysis based on weighted learning under the direction of Drs. Yichao Wu
ACKNOWLEDGEMENTS
There are many people who have helped and guided me through my academic journey.
I would like to take this opportunity to express my gratitude to a few people while
acknowledging that many more people deserve praise.
I would like to express my deep and sincere appreciation to my advisors Drs. Yichao
Wu and Hao Helen Zhang for their generosity and patience for me. Thanks for their full
emotional and financial support, I could entirely focus on my academic work during my PhD research. Their profound insight into statistics and professionalism let me explore a
variety of areas in modern statistics which will be valuable asset for my future academic
achievement. It was my great fortune to have them as my academic mentors.
I wish to thank all the faculties and staffs in our department. My appreciation should
go to Drs. Len Stefanski and Hua Zhou for joining my committee and suggesting
con-structive comments and suggestions that led to significant improvement of my dissertation
research. I want to thank both current and previous directors of the graduate program
in the department during my years in North Carolina State University, Drs. Sujit Ghosh
and Jacqueline Hueghes-Oliver for generously answering all the questions that I had have. Especially, I would like to thank Dr. Sujit Ghosh for suggesting an excellent idea during
his course, Bayesian Biostatistics and spending additional time to write a paper with
me. I am also appreciated of all the enthusiastic teachers of the courses that I had taken
in graduate school. I particularly thank the two wonderful teachers for their excellence
in teaching, Dr. Subhashis Ghoshal of asymptotic statistics and Dr. Butch Tsiatis of
semiparametric inference and missing data.
I also want to express my gratitude to people who support me in my home country,
Korea. My deep appreciation should firstly go to Dr. Myuongshic Jhun who led me to
the world of statistics and has always given me full support in many ways. Although I cannot acknowledge individually by names, I am very thankful to all the faculty members
in statistics department at Korea University. It was great to start my academic life with
such great mentors. My special thanks also goes to my friends in Korea. Memory
of wonderful days with them has always refreshed me whenever I have had hard time
TABLE OF CONTENTS
LIST OF TABLES . . . ix
LIST OF FIGURES . . . xi
Chapter 1 Introduction . . . 1
1.1 Weighted Support Vector Machines . . . 1
1.1.1 Probability Estimation . . . 3
1.1.2 Solution paths of the WSVM . . . 3
1.1.3 Connection to Kernel Quantile Regressions . . . 4
1.2 Sufficient Dimension Reduction . . . 4
1.2.1 Existing SDR methods . . . 5
1.2.2 Difficulties in Binary Classification . . . 6
1.3 Outline of the Thesis . . . 6
Chapter 2 Two-Dimensional Solution Surface for Weighted Support Vec-tor Machines . . . 8
2.1 Introduction . . . 8
2.2 Problem Setup . . . 10
2.3 Joint piecewise-linearity . . . 14
2.4 Solution Surface Algorithm . . . 15
2.4.1 Initialization . . . 15
2.4.2 Update . . . 16
2.4.3 Resolving Empty Elbow . . . 19
2.4.4 Pseudo Algorithm . . . 21
2.5 Computational Complexity . . . 21
2.6 Illustration . . . 25
2.7 Applications to Probability Estimation . . . 26
2.8 Concluding Remarks . . . 29
Chapter 3 A Piecewise Conditional Survival Function Estimator . . . . 31
3.1 Introduction . . . 31
3.2 Censored Kernel Quantile Regression . . . 34
3.3 Piecewise Linear Conditional Survival Function . . . 35
3.3.1 Joint Piecewise Linearity of the CKQR solutions . . . 35
3.3.2 Conditional Survival Function Estimator . . . 38
3.3.3 Theoretical Results: Uniform Risk Bound . . . 38
3.5.2 Violation of Monotonicity . . . 42
3.6 Numerical Results . . . 43
3.7 Real Data Analysis . . . 46
3.8 Discussion . . . 47
Chapter 4 Probability-Enhanced Sufficient Dimension Reduction . . . . 49
4.1 Introduction . . . 49
4.2 Equivalency of SY|x and Sp(X)|X . . . 52
4.3 Probability-based slicing via WSVM . . . 52
4.4 Probability-Enhanced (PRE) Dimension Reduction Procedures . . . 54
4.4.1 PRE-SIR1 . . . 54
4.4.2 PRE-SIR2 . . . 55
4.4.3 PRE-CUME . . . 56
4.5 Estimation of Structure Dimensionality . . . 57
4.6 Simulated Examples . . . 58
4.7 Application to the Wisconsin Diagnosis Breast Cancer Data . . . 61
4.8 Concluding Remarks . . . 63
Chapter 5 Weighted Principal Support Vector Machines . . . 65
5.1 Introduction . . . 65
5.2 Principal Support Vector Machine . . . 66
5.3 Weighted PSVM for Linear SDR . . . 67
5.3.1 Finite Sample Estimation . . . 68
5.3.2 Large Sample Properties . . . 69
5.3.3 Determination of Structure Dimensionality . . . 72
5.4 Kernel WPSVM for Nonlinear SDR . . . 74
5.4.1 Sample Estimation . . . 75
5.4.2 How to choose Ω . . . 76
5.4.3 Summary of the Kernel WPSVM procedure . . . 77
5.5 Simulation Study . . . 77
5.5.1 Linear WPSVM . . . 77
5.5.2 kernel WPSVM . . . 81
5.6 Illustration to Wisconsin Breast Cancer Data . . . 83
5.7 Discussions . . . 86
References . . . 88
Appendices . . . 94
Appendix A Joint Piecewise Linearity . . . 95
A.1 Weighted Support Vector Machines . . . 95
Appendix B Uniform Risk Bound of the Piecewise Linear Survival Function
Estimator . . . 97
Appendix C Tow-dimensional Solution Surface Algorithm of Weighted Kernel Quantile Regressions . . . 100
C.1 Initialization . . . 100
C.2 UpdatingSℓ . . . 101
C.3 Empty Elbow . . . 102
Appendix D Unbiasedness of Weighted Principal Support Vector Machines for SDR . . . 104
D.1 Linear Weighted PSVM . . . 104
D.2 Kernel Weighted PSVM . . . 105
Appendix E Asymptotic Properties of Linear Weighted Principal Support Vec-tor Machines . . . 107
E.1 Consistency of the Linear WPSVM Solution . . . 107
E.2 A Bahadur Representation of the Linear WPSVM Solution . . . 108
E.3 Asymptotic Normalities of Candidate Matrix . . . 110
Appendix F Selection Consistency of BIC-CV procedure for Structure Dimen-sionally . . . 112
LIST OF TABLES
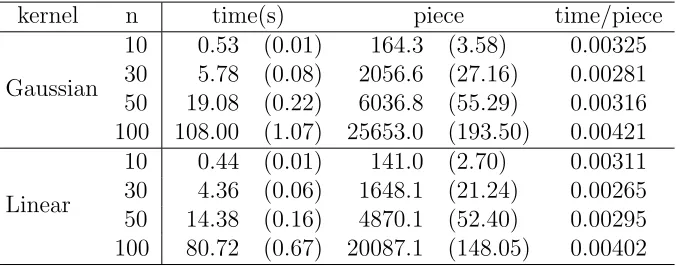
Table 2.1 Empirical computing time based on 100 independent repetitions:
the machine we used equips Intel Core (TM) i3 550 @ 3.20GHZ
CPU with 4GB memory. . . 26
Table 2.2 Sources for the microarray data used for illustrations: The numbers
of predictors (p) are all 7219 and much larger than the sample size
(n). . . 29
Table 2.3 Test CREs for Microarray data sets (p > n). . . 29
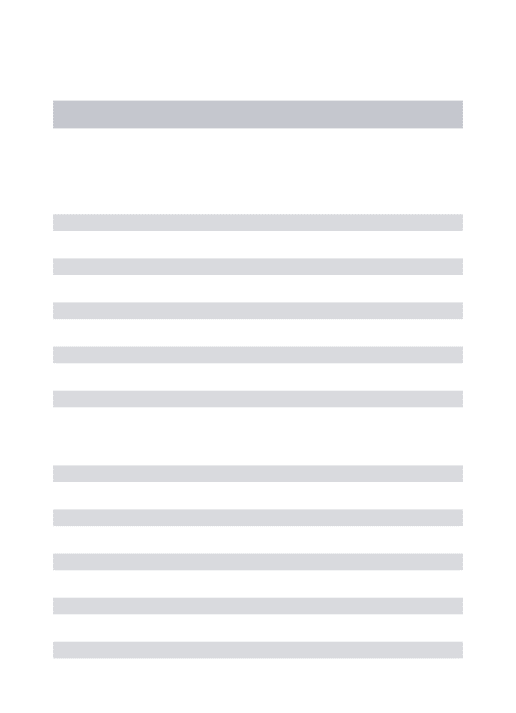
Table 3.1 The proposed PLE outperforms both standard and L2-penalized
Cox model if the PH assumption is violated. Bold case is used to
represent a winning estimator in terms of ¯DRISE in each scenario.
In some cases, two methods are marked in bold together since their differences are not statistically significant. Quartiles of the standard
errors of all the entries are Q1 =.118, Q2 =.174, and Q3 =.368. . 44
Table 4.1 Averaged Frobenius distances betweenPBandPBˆ over 100
indepen-dent repetitions are shown under various scenarios. Corresponding
standard deviations are given in parentheses. . . 60
Table 4.2 The first five leading eigenvalues (λ1,· · · , λ5) of the candidate
ma-trices estimated by different SDR methods for the WDBC data. Cumulative ratios of the values in percentage are given in parentheses. 61
Table 4.3 Averaged test error rates (in percentage) of thek-nearest neighbor
classifier (k = 3,5,7,9) over 100 random partitions for the WDBC
data with respect to the firstdsufficient predictors (d = 1,2,3,4,5),
which are estimated by SDR methods. Corresponding standard
de-viations are given in parentheses. . . 64
Table 5.1 Averaged distance measures defined in (5.23) over 100 independent
repetitions. The corresponding standard deviations are in parentheses 79
Table 5.2 Empirical probabilities (in percentage) of correctly estimating true
k based on 100 independent repetitions: The CVBIC procedure
for the linear WPSVM outperforms the permutation test for SAVE
estimator and shows promising result whenn = 1000. . . 80
Table 5.3 Averaged test error rates (in percentage) of theκ-NN classifier (κ =
3) over 100 random partitions for the WDBC data with respect to
the firstksufficient predictors (k = 1,2,3,4,5), which are estimated
by different SDR methods. Corresponding standard deviations are
Table 5.4 Averaged test error rates (in percentage) of theκ-NN classifier (κ = 3) over 100 random partitions for the WDBC data with respect to
the firstksufficient predictors (k = 1,2,3,4,5), which are estimated
by different SDR methods. Corresponding standard deviations are
LIST OF FIGURES
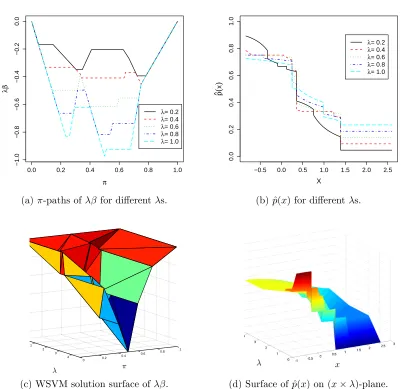
Figure 2.1 Simulated toy example: the top two panels depict the solution λβ
and the estimate ˆp(x) given by five marginalπ-solution paths, with
λ values fixed at 0.2,0.4,0.6,0.8,1.0. The bottom two panels plot
the joint solution surface of λβ and the corresponding surface of
ˆ
p(x). Notice that the horizontal axis of (b) is x. Similarly the
surface in (d) lies on the (x×λ) plane. . . 11
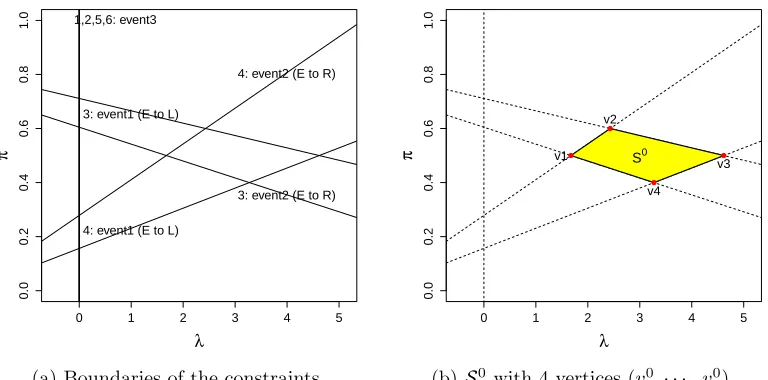
Figure 2.2 The illustration of defining S0 generated from the initial point
(λ0, π0) for the toy example in Section 2.1: Each line in the left
penal (a) represents a constraint boundary where an event occurs
as labeled. For example, the upper right label represents the event:
the fourth example moves from E to R on the boundary. The set
S0 obtained from the boundaries in (a) is depicted in (b). . . . . 18
Figure 2.3 The updated polygons S1
r, r = 1,· · · ,4 from the middle points
m1,· · · , m4 of the sides of S0 in Figure 2.2 (b): Dotted lines in each subfigure depict the boundaries of constrains for obtaining
the polygon. . . 20
Figure 2.4 Illustration of the refining step and its effect for simulated example:
The left penal (a) shows all the boundaries of constraints. Dashed
(red) lines represents boundaries of constraints with b < 0 and
only two constraints (bold) are used to definedSℓand the other two
excluded are chosen by comparingπvalues atλ= 0 andλ0. Dotted
(blue) lines are the ones withb >0 and we can exclude dominated
constraints in a similar manner. The right panel (b) shows dramatic saving in computation after use of the refining step by comparing
the numbers of intersection points of unrefined constraints (nc) and
refined ones (˜nc) as functions of sample size, n. . . 24
Figure 2.5 Real data illustration onkyphosis data. . . 27
Figure 3.1 Two-dimensional solution surfaces of CKQR for the Myeloma data:
The left penal (a) shows vertices of the Sℓs produced from the
proposed algorithm and the right panel (b) depicts the solution
surface of ˆθ48. . . 41
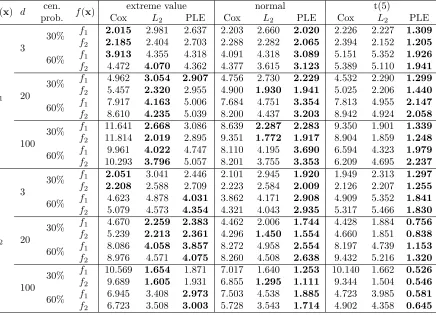
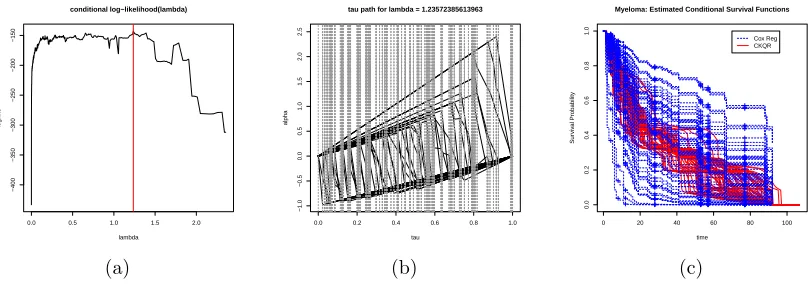
Figure 3.2 The piecewise linear conditional survival function estimator for
Myeloma Data: the left panel (a) shows cross-validated conditional
log-likelihood for different λ and the (red) vertical line represents
the optimalλopt which maximizes the conditional log-likelihood; in
the middle panel (b), solution paths of ˆθ1,· · · ,θˆ48 as a function τ
for the λopt are depicted; the right panel (c) shows estimated CSF
Figure 3.3 The piecewise linear conditional survival function estimator for
Lymphoma Data: the proposed piecewise linear CSF estimator and
theL2-penalized Cox regression give quite different shapes of
func-tions. . . 47
Figure 4.1 Results of classical SDR methods for WDBC data: panel (a) plots
the response versus the sufficient dimension reduction predictor estimated by SIR; panels (b) and (c) show the first two directions ˆ
b⊤1xvs. ˆb⊤2xestimated by SAVE and pHd, respectively. Here blue
circle denotes one class while red plus the other. . . 51
Figure 4.2 Solution path of ˆf(x) for simulated example: Vertical lines
repre-sent ˆπi, i= 1,· · ·, n using the average-type definition. . . 56
Figure 4.3 Probability-enhanced SDR for WDBC data: Scatter plots of the
first two sufficient predictors estimated by PRE-SIR1, PRE-SIR2,
and PRE-CUME are depicted, respectively. . . 62
Figure 5.1 π-path of the WPSVM solution ˆβn: The π-path algorithm
effi-ciently computes complete solutions of ˆβn for all π ∈ [0,1] by
taking advantage of the piecewise linearity property. Ten
piece-wise linear (red) paths are shown since p= 10. The (blue) dotted
vertical lines represent pre-specified gird ofπ = (1,· · · ,9)/10. . . 70
Figure 5.2 Surface plots of the last two functionsf4 and f5: the functionf4 is
almost symmetric about the origin to a certain degree and the last
f5 is exactly symmetric about the origin. . . 78
Figure 5.3 Nonlinear SDR results for a data set from f5: The top-right panel
(a) depicts original predictors on the (X1 ×X2) plane. The rest
of three panels (b), (c), and (d) show scatter plots of the first two sufficient predictors estimated by SAVE, linear WPSVM, and nonlinear WPSVM, respectively. It is clearly observed that the
kernel WPSVM performs very well while the linear WPSVM fails. 82
Figure 5.4 SDR results for WDBC data: The first panel (a) depicts a values
ofGn(k) for allk = 1,· · · ,30 withρ=.009 chosen by five-fold CV
and shows that the selected ˆk is 3. In the panel (b), 3D-scatter plot
(since ˆk = 3) of predictors on estimated SY|x. The last panel (c)
shows scatter plot of the first two sufficient predictors estimated by
Chapter 1
Introduction
High-dimensional data are frequently encountered in a variety of applications as related
techniques for collecting, storing, and processing data advance rapidly. In this thesis
which consists of four inter-related topics, we develop new statistical tools to analyze
such high-dimensional data based on weighted learning.
1.1
Weighted Support Vector Machines
In binary classification, we are given a set of data {(xi, yi), i= 1,· · · , n} of size n where
xi ∈ Rp and yi ∈ {−1,+1} denote a p-dimensional predictor and a binary response. Its
goal is to construct a reasonable classification rule. Among many others, the support
vector machine (SVM) (Vapnik, 1996) is one of the most well known classifiers. It has
gained much popularity since its introduction. It originates with the simple idea of finding
an optimal hyperplane to separate two classes. The hyperplane is optimal in the sense
that the geometric margin between these two classes is maximized. Later it was shown by Wahba (1999) that the SVM can be fit in the general regularization framework by
solving
min
f∈F n ∑
i=1
H1(yif(xi)) +
λ
2J(f), (1.1)
where H1(u) = max(1 − u,0) is the hinge loss function, J(f) denotes the roughness
penalty of a functionf(·) in a function spaceF, and the sign off(x) for a given predictor
x will be used for class prediction. Here λ > 0 is a regularization parameter which
roughness penalty. A common choice of the penalty is J(f) = ∥f∥2
F. Other choices
include the l1-norm penalty (Zhu et al., 2003; Wang and Shen, 2007) and the SCAD
penalty (Zhang et al., 2006). In general, we setF to be the Reproducing Kernel Hilbert
Space (RKHS, Wahba, 1990) HK, generated by a non-negative definite kernel K(·,·).
By the Representer Theorem (Kimeldorf and Wahba, 1971), the optimizer of (1.1) has a
finite dimensional representation given by
f(x) = b+
n ∑
i=1
θiK(x,xi). (1.2)
Due to (1.2),∥f∥2
F =
∑n i=1
∑n
j=1θiθjK(xi,xj). Then the SVM estimatesf(x) by solving
min
b,θ1,···,θn
n ∑
i=1
H1
(
yi [
b+
n ∑
j=1
θjK(xi,xj) ])
+λ
2
n ∑
i=1
n ∑
j=1
θiθjK(xi,xj). (1.3)
Note that, in the standard SVM, each observation is treated equally no matter which
class it belongs to. Yet this may not be always optimal. In some situations, it is desired
to assign different weights to the observations from different classes; one such example is when one type of misclassification induces a larger cost than the other type of
mis-classification. Motivated by this, Lin et al. (2004) considered a broader class of learning,
the so-called weighted SVM (WSVM) by incorporating a weight parameter to adjust the
imbalance between the two classes. The WSVM solves
min
b,θ1,···,θn
n ∑
i=1
πiH1
(
yi [
b+
n ∑
j=1
θjK(xi,xj) ])
+ λ
2
n ∑
i=1
n ∑
j=1
θiθjK(xi,xj), (1.4)
where the weight πi’s are given by
πi ≡π(yi) = {
1−π if yi = +1
π if yi =−1
with π∈(0,1). Each point (xi, yi) is associated with one weight parameterπi, the value
of which depends on the label yi. Advantages of the weighted SVM include flexibility
1.1.1
Probability Estimation
Besides learning a classification boundary, one important application of the WSVM is
estimating conditional probability proposed by Wang et al. (2008), which is motivated
by the Fisher consistency of the Hinge loss shown by Lin (2002). According to Lin et al.
(2004), the WSVM classifier provides a consistent estimate of sign(p(x)−π) for anyx,
where p(x) is the conditional class probability p(x) = P(Y = 1|X = x). Using this
fact, Wang et al. (2008) proposed the WSVM-based probability estimation. The basic
idea is to divide and conquer by converting a probability estimation problem into many
classification sub-problems. Each classification sub-problem is assigned with a different
weight parameter π, and these sub-problems are solved separately. Then the solutions
are assembled together to construct the final probability estimator. A more detailed
description is as follows. Consider a sequence of 0 < π(1) < · · · < π(M) < 1. For each
m = 1,· · · , M, solve the (1.4) associated with π(m) and denote the solution by ˆfm(·).
Finally, for anyx, construct the probability estimator as ˆp(x) = {π(m+)+π(m−)}/2, where
m+ = argmaxmfˆm(x) > 0 and m− = argminmfˆm(x) < 0. The proposed probability
estimator naturally enjoys the aforementioned advantages of the WSVM.
1.1.2
Solution paths of the WSVM
In a regularization framework, it is very common to study the regularization path of the
SVM solution in order to automate the selection procedure of the regularization
param-eter λ. Hastie et al. (2004) showed that the SVM solutions move in a piecewise linear
manner as a function ofλand proposed an efficient solution path algorithm. Its extension
to the WSVM is straightforward since the piecewise linearity of the regularization paths
comes from the combination of anL1-type loss and anL2-type penalty in (1.3) and
incor-porating a weight parameter does not break the particular structure down. We refer to
the regularization path as λ-paths in order to emphasize the solution paths as a function
of λ. On the other hand, the WSVM solutions can be regarded as a function ofπ for a
given λ and we can define π-paths analogous to the λ-paths. The piecewise linearity of
the π-path was established by Wang et al. (2008). Complete π-paths of the WSVM can
facilitate the implementation of the probability estimation procedure. However, unlike
marginal solution paths, it is largely unknown how the WSVM solutions move as the two
1.1.3
Connection to Kernel Quantile Regressions
The quantile regression is a very popular as an alternative of the mean regression and is
characterized by the check loss ρτ(u) defined by
ρτ(u) = {
τ u, if u≥0
−(1−τ)u, if u <0,
where τ ∈ [0,1] is referred to as a quantile parameter since it controls a target quantile
of interest. The kernel quantile regression (KQR, Takeuchi et al., 2006; Li et al., 2007)
solves the following optimization problem defined on the RKHS.
min
f∈HK
n ∑
i=1
ρτ(yi−f(xi)) +
λ
2∥f∥ 2
HK.
The only difference of the KQR from the SVM is that the hinge loss is replaced with
the check loss. Moreover these loss functions are very closely related as shown in the
following. For any a∈[−1,1] andy={−1,1}, the check loss with a quantile parameter
τ given is
ρτ(y−a) =ρτ(y(1−ya)) = {
τ|1−ya|, if y = 1
−(1−τ)|1−ya|, if y =−1.
That is, the KQR is theoretically equivalent to the WSVM if the response is binary.
1.2
Sufficient Dimension Reduction
High dimensional data become more popular as related data acquisition and storage techniques advance. In modern statistics, it is not optional but essential to reduce
di-mensionality of the data without loss of information.
In this context, sufficient dimension reduction (SDR) has been developed under less
stringent model assumption as follows. SDR assumes
notes statistical independence, and B is a p×k-dimensional matrix. In other words,
the dependent structure between Y and X is only through B⊤X. The model (1.5) is
very flexible and covers a lot of statistical models since it does not assume any specific
relation betweenX andY but the conditional independence. Under model (1.5), SDR is
achieved by estimating B and hence the matrix B or more precisely the space spanned
by it, which is referred to as dimension-reduction subspace, is a target of interest in the
SDR. However, B itself is not identifiable since any full-rank linear combination of B
satisfies (1.5) as long as B does. The central subspace denoted by SY|x is defined as the
intersection of all dimension-reduction subspaces satisfying (1.5). SY|x has the lowest
di-mension among all didi-mension-reduction subspaces. Under mild conditions,SY|x uniquely
exists (Cook, 1996, 1998b). We assume the unique existence ofSY|x andSY|x= span(B)
throughout this article. The dimension of B, k is called structure dimensionality in the
literature and its estimation is another important step in SDR.
One often refers to (1.5) as linear SDR. As a nonlinear generalization of linear SDR,
Cook (2007) introduce nonlinear SDR which assumes
Y ⊥X|ϕ(X), (1.6)
whereϕ:Rp 7→Rk is an arbitrary function ofX. Under model (1.6), SDR is achieved by
obtaining a functionϕ which need not to be linear. Similar to linear SDR, the unknown
function ϕ is not unique, but is assumed to be unique modulo injective transformation
to guarantee its identifiability.
1.2.1
Existing SDR methods
There are a variety of methods developed for sufficient dimension reduction in the
liter-ature. Toward linear SDR, sliced inverse regression (SIR; Li, 1991) is the most popular
method in the literature. Many linear SDR methods have been developed since SIR was
introduced and these include, but are not limited to, sliced averaged variance estimator (SAVE, Cook and Weisberg, 1991), principal Hessian direction (pHd, Li, 1992; Cook,
1998a), iterative Hessian transformation (IHT, Cook and Li, 2002), Fourier method (Zhu
and Zeng, 2006), and directional regression (DR, Li and Wang, 2007). For nonlinear
SDR, several methods have been recently proposed by extending idea of SIR. See for
1.2.2
Difficulties in Binary Classification
SDR originally arises in the regression context. The performance of most SDR methods
may suffer severely when the response is binary. For example, SIR can estimate at
most one direction of SY|x and SAVE is known for its inefficiency when the response is
binary (Li and Wang, 2007). This is not surprising since both methods slice predictors
according to the order of response to estimate inverse regression curve and hence become ineffective with a binary response. Cook (1998b) discussed the difficulty of SDR for
binary classification in its whole Chapter 5.
Binary classification with high-dimensional data is commonly encountered in a variety
of applications such as clinical trials, genetics, finance, engineering, and computer science.
Thus, it is desired to develop an efficient method to reduce dimension of the data without
loss of information with binary response.
1.3
Outline of the Thesis
The first two chapters are about two dimensional solution surfaces of the WSVM and
the (weighted) KQR, respectively. In Chapter two, we first establish that the WSVM
solutions are jointly piecewise linear with respect to the regularization and the weight
parameter, which enables us to develop a state-of-the-art algorithm that can compute the
entire trajectory of the WSVM solutions for every parameter pair at a feasible
computa-tional cost. The derived two-dimensional solution surface provides theoretical insight on
the behavior of the WSVM solutions. Numerically, the algorithm can greatly facilitate
the implementation of the WSVM and automate the selection process of the optimal reg-ularization parameter. In Chapter three, motivated by the closed connection between the
WSVM and the KQR, we propose a piecewise linear conditional survival function (CSF)
estimator from the two dimensional solution surfaces of the censored kernel quantile
re-gression (CKQR) that we developed for censored survival data. The solution surfaces
contain complete information of the CKQR for any arbitrary pairs of the regularization
and the quantile parameter, which naturally leads a CSF estimator by aggregating the
information from the complete solution surfaces. The proposed CSF estimator which is
Chapter four, probability-enhanced SDR scheme is proposed. Its key idea is to slice
data based on the conditional class probability p(x) rather than the binary response y.
We first show that the central subspace based on p(x) is the same as that based on y.
This important result justifies the proposed slicing scheme from a theoretical perspective
and assures no information loss. In practice, the true conditional class probability is
generally not available, and probability estimation can be challenging for data with
large-dimensional inputs. We further show that, to implement the new slicing scheme, one does
not need exact probability values, and all the required information is the relative order of
the probability values. Motivated by this, our new SDR procedure bypasses probability
estimation, and employs Fisher consistency of the WSVM to directly estimates the order of probability values, based on which the slicing is done. In Chapter five, we introduce
weighted principal support vector machine (WPSVM) for SDR in binary classification
by extending the idea of principal support vector machine recently developed by Li et al.
(2011) in the context of regression. The proposed WPSVM preserves all the merits of
PSVM and successfully achieves SDR in binary classification. Its estimation become very
Chapter 2
Two-Dimensional Solution Surface
for Weighted Support Vector
Machines
2.1
Introduction
Frequently encountered in real applications is binary classification, in which we are given
a training set {(xi, yi), i = 1,· · · , n} of size n and the goal is to learn a classification
rule. Here xi ∈ Rp and yi ∈ {−1,1} denote a p-dimensional predictor and a binary
response (or class label), respectively, for the ith example. The primary goal of the
binary classification is to construct a classifier which can be used for class prediction
of new objects with predictors given. The (weighted) SVM is one of the most popular
classification methods in this context.
Besides learning the classification boundary, one of their important applications is
to estimate class probabilities introduced in Section 1.1.1. One main concern about the
probability estimation scheme is its computational cost. The cost comes from two sources:
there are multiple sub-problems to solve, since the weight parameter π varies in (0,1);
each sub-problem is associated with one regularization parameter λ, which needs to be
adaptively tuned in the range (0,∞). To facilitate the computation, theλ-path algorithm
unknown how the WSVM solution changes when both the regularization parameterλand
the weight parameterπvary together. The main purpose of our two-dimensional solution
surface is to reduce the computation and tuning burden by automatically obtaining the
solutions for all possible (π, λ) with an efficient algorithm.
One main motivation of this paper is to study the behaviors of the entire WSVM
so-lutions and characterize them by a simple representation form through their relationship
toπand λ. We use subscripts to emphasize that the WSVM solutionf is a function ofλ
andπ and sometimes omit the subscripts when they are clear from the context. Another
motivation for the need of the solution surface is to automate the selection of the
reg-ularization parameter and improve the efficiency of searching process. Although Wang et al. (2008)’s conditional class probability estimator performs well as demonstrated by
their numerical examples, its performance depends heavily on λ. They proposed to tune
λby using a grid search in their numerical illustrations. Yet, it is well known that such a
grid search can be computationally inefficient and, in addition, its performance depends
on how fine the grid is. The above discussions motivate us to develop a two-dimensional
solution surface (rather than a one-dimensional path) as a continuous function of both λ
andπ in the analogous way that one resolved the inefficiency of the grid search for
select-ing the regularization parameter λof the SVM by computing the entire λ-regularization
path (Hastie et al., 2004). From now on, we refer to the new two-dimensional solution
surface of the WSVM as the WSVM solution surface.
In order to show the difficulties in tuning the regularization parameter for the
prob-ability estimation (Wang et al., 2008) and motivate our new tuning method based on
the WSVM solution surface, we use a univariate toy example generated from a Gaussian
mixture: xi is randomly drawn from the standard normal distribution ifyi = 1 and from
N(1,1) otherwise, with five points from each class. The linear kernel (K(xi, xj) =xixj)
is employed for the WSVM and its solution is then given by f(x) = b + βx with
β = ∑ni=1θixi. In order to describe the behavior of f(x), we plot λβ based on the
obtained WSVM solution surface (or path), since λβ, instead of β, is piecewise-linear in
λdue to our parametrization. In Figure 2.1, the top two panels depict the solution paths
of λβ for the different values of λ fixed at 0.2,0.4,0.6,0.8,1.0 (left) and the
correspond-ing estimates of ˆp(·) as a function of x (right); the bottom two panels plot the entire
two-dimensional joint solution surface (left) and the corresponding probability estimate
ˆ
are piecewise-linear in π they have quite different shapes for different values of λ (see
(a)). Thus the corresponding probability estimates can be quite different even for the
same x(see (b)), suggesting the importance of selecting an optimal λ. By using the
pro-posed WSVM solution surface, we can completely recover the WSVM solutions on the
whole (λ×π)-plane (see (c)), which enables us to produce the corresponding conditional
probability estimators at a given x for every λ with very little computational expense
(see (d)). We will shortly demonstrate that it is computationally efficient to extract
marginal paths (λ-path or π-path) once the WSVM solution surface is obtained. In this
example, we use a grid of five equally-spaced λs which is very rough. In practice, it is
typically not known a priori how fine the grid should be or what the appropriate range
of the grid is. If the data are very large or complicated, the grid one choose may not be
fine enough to capture the variation of the WSVM solution and will lose efficiency for
the subsequent probability estimation. The proposed WSVM solution surface provides
a complete portrait for the WSVM solution corresponding to any pair of λ and π and
therefore naturally overcomes this kind of practical difficulties, in addition to the gain in
computational efficiency.
In this article, we show that the WSVM solution is jointly piecewise-linear in both
λ and π and propose an efficient algorithm to construct the entire solution surface on
the (λ×π)-plane by taking advantage of the established joint piecewise-linearity. As a
straightforward application, an adaptive grid for tuning the regularization parameter of
the probability estimation scheme (Wang et al., 2008) is proposed. We finally remark
that the WSVM solution surface has broad applications in addition to the probability
estimation.
2.2
Problem Setup
By introducing nonnegative slack variables ξi, i = 1,· · · , n and using inequality
con-straints, the WSVM problem (1.4) can be equivalently rewritten as
min
b,θ1,···,θn
n ∑
i=1
πiξi+
λ
2
n ∑
i=1
n ∑
j=1
θiθjK(xi,xj)
0.0 0.2 0.4 0.6 0.8 1.0
−1.0
−0.8
−0.6
−0.4
−0.2
0.0
π
λβ
λ= 0.2
λ= 0.4
λ= 0.6
λ= 0.8
λ= 1.0
(a)π-paths ofλβ for differentλs.
−0.5 0.0 0.5 1.0 1.5 2.0 2.5
0.0
0.2
0.4
0.6
0.8
1.0
X
p^
(
x
)
λ= 0.2
λ= 0.4
λ= 0.6
λ= 0.8
λ= 1.0
(b) ˆp(x) for differentλs.
1 2
3 4
0 0.2
0.4 0.6
0.8 1
π λ
(c) WSVM solution surface ofλβ. (d) Surface of ˆp(x) on (x×λ)-plane.
Figure 2.1: Simulated toy example: the top two panels depict the solution λβ and
the estimate ˆp(x) given by five marginal π-solution paths, with λ values fixed at
0.2,0.4,0.6,0.8,1.0. The bottom two panels plot the joint solution surface of λβ and
the corresponding surface of ˆp(x). Notice that the horizontal axis of (b) is x. Similarly
The corresponding Lagrangian primal function is constructed as
LP : n ∑
i=1
πiξi+
λ
2
n ∑
i=1
n ∑
j=1
θiθjK(xi,xj) + n ∑
i=1
αi(1−yif(xi))− n ∑
i=1
γiξi, (2.1)
where αi ≥0 andγi ≥0 are the Lagrange multipliers. To derive the corresponding dual
problem, we set the partial derivatives ofLP in (2.1) with respect to the primal variables
to zero, which gives
∂ ∂θi
:
n ∑
j=1
θjK(xi,xj) =
1
λ
n ∑
j=1
αjyjK(xi,xj), (2.2)
∂ ∂b :
n ∑
i=1
αiyi = 0, (2.3)
∂ ∂ξi
: αi =πi−γi, (2.4)
along with the Krush-Kuhn-Turker (KKT) conditions
αi[1−yif(xi)−ξi] = 0, (2.5)
γiξi = 0. (2.6)
Notice from (2.2) that the function (1.2) can be rewritten as
f(x) = b+ 1
λ
n ∑
i=1
αiyiK(x,xi). (2.7)
By combining (2.2-2.6), the dual problem of the WSVM is given by
max
α1,···,αn
n ∑
i=1
αi −
1 2λ
n ∑
i=1
n ∑
j=1
αiαjyiyjK(xi,xj) (2.8)
subject to
n ∑
i=1
yiαi = 0 and 0 ≤αi ≤πi, ∀i= 1,· · · , n.
to select the desired λ and π. This is very computationally intensive for large data set
because the QP itself is a numerical method whose computational complexity increases
polynomially in n.
For the standard SVM (equivalent to a special case of the WSVM with the weight
parameter π = 0.5), Hastie et al. (2004) showed the piecewise-linearity of αi in λ and
developed an efficient algorithm to compute the entire piecewise-linear solution path.
The same idea can be extended straightforwardly to the WSVM with any fixed weight
parameter or any fixed individual weights. In addition, Wang et al. (2008) showed the
WSVM solutions αi are piecewise-linear in the weight parameter π while keeping the
regularization parameterλfixed. However it is largely unknown how the WSVM solution
αi changes with respect to the two parameters jointly. In this article, we show that the
WSVM solutions αis, as a function of both λ and π, form a continuous piecewise-linear
solution surface on the (λ×π)-plane and propose an efficient algorithm to compute the
entire solution surface.
Similar to the idea of Hastie et al. (2004), we categorize all the examples, i= 1,· · · , n
into the three disjoint sets as
E ={i:yif(xi) = 1, 0≤αi ≤πi} (elbow),
L={i:yif(xi)<1, αi =πi} (left),
R={i:yif(xi)>1, αi = 0} (right).
It is easy to see that the above three sets are always defined uniquely by the conditions
(2.2)-(2.6). The set names come from the particular shape of the hinge loss function
(Hastie et al., 2004). Note that{αi,∀i∈ E}contains most of the information on how the
WSVM solution changes on the (λ×π)-plane, since the rest solutions {αi, i ∈ L ∪ R}
are trivially determined by the definition of the sets.
As λ and π change, the sets may change and, as long as this happens, we call it an
event. All the solution surfaces forαi, i= 1,· · · , n are continuous and hence no element
inL can move directly toRor vice versa. Therefore there are only three possible events
to be considered as follows. The first event defines when one of αi, i ∈ E reaches πi
and the corresponding index i exits from E to L (event 1). Similarly, an αi, i ∈ E can
reach the other boundary 0 and the index moves form E toR (event 2). The last event
2.3
Joint piecewise-linearity
In this section, we study the behavior of the WSVM solutions from a theoretical point of
view. One major discovery we have made is that,αi, i∈ E, hence all the αi, i= 1,· · · , n
changes in a jointly piecewise-linear manner when λ and π vary. The following theorem
describes howαi moves asλ and π change. For simplicity, we defineα0 =λb.
Theorem 1. (Joint Piecewise-Linearity) Suppose we have a point (λℓ, πℓ) in the (λ× π) plane. Let Eℓ, Lℓ, Rℓ, αℓ = (αℓ1,· · ·, αnℓ)T, and αℓ0 denote the associated sets and solutions obtained at (λℓ, πℓ), respectively. Now, we consider a subset Sℓ (of the (λ×π) -plane) which contains (λℓ, πℓ) such that no event happens within Sℓ. In other words, for all (λ, π) ∈ Sℓ, the associated three sets, E, L, and R remain the same as Eℓ, Lℓ, and Rℓ, respectively. Then the solution α
i, i ∈ {0} ∪ Eℓ, denoted by α0,E in a vector form moves in Sℓ as follows:
α0,E ≡α0,E(λ, π) = αℓ0,E +Gℓ∆, ∀ (λ, π)∈ Sℓ, (2.9)
where αℓ
0,E ={αℓi :i∈ {0} ∪ Eℓ} and ∆= (∆λ,∆π)T = (λ−λℓ, π−πℓ)T. The gradient matrix, Gℓ is given by
Gℓ =A−ℓ1Bℓ= (
0 yT
ℓ yℓ K∗ℓ
)−1(
0 |Lℓ|
1 −k∗ℓ )
, (2.10)
where K∗ℓ = {yiyjK(xi,xj) : for i, j ∈ Eℓ}; k∗ℓ = { ∑
j∈LℓyiK(xi,xj) : i ∈ Eℓ}T; yℓ = {yi : i ∈ Eℓ}T; |A| denotes the cardinality of a set A; and 1 is the one vector of length |Eℓ|.
The proof of Theorem 1 is given in Appendix A.1. We remark that Aℓ is rarely
singular in practice, and related discussions can be found in Hastie et al. (2004). It is
worthwhile to point out that the joint piecewise-linearity of the solution guarantees the
marginal piecewise-linearity as presented in Corollary 2, but not vice versa. Therefore,
Theorem 1 implies the piecewise-linearity of the marginal solution paths as a function
linearly in λ∈ {λ: (λ, π0)∈ Sℓ} as follows.
α0,E =αℓ0,E+g ℓ
1∆λ.
Similarly, α0,E changes in π∈ {π : (λ0, π)∈ Sℓ} for a given λ0 as follows.
α0,E =αℓ0,E +g ℓ
2∆π, where gℓ
1 and gℓ2 denote the first and second column vectors ofGℓ in (2.10), respectively.
The classification function f(x) can be conveniently updated by plugging (2.9) into
(A.1), which gives
f(x) = λ
ℓ
λ
[
fℓ(x)−hℓ1(x)]+hℓ1(x) + π−π
ℓ
λ h
ℓ
2(x), (2.11)
where
hℓ1(x) = g01+
∑
i∈Eℓ
gi1yiK(x,xi),
hℓ2(x) = g02+
∑
i∈Eℓ
gi2yiK(x,xi) + ∑
i∈Lℓ
K(x,xi),
and (gi1, gi2) denotes the row ofGℓ wherei∈ {0} ∪Eℓ. We observe from (2.11) thatf(x)
is not jointly piecewise-linear in (λ, π) while it is marginally piecewise-linear inλ−1 and
π, respectively.
2.4
Solution Surface Algorithm
In this section, we propose an efficient algorithm to compute the entire solution surface
of the WSVM on the (λ×π)-plane by using the joint piecewise-linearity established in
Theorem 1.
2.4.1
Initialization
Denote index sets I+ ={i :yi = 1} and I− ={i:yi =−1}. We initialize the algorithm
∑
i∈I+πi(π0) = ∑
i∈I−πi(π0). Withπ=π0 it is easy to verify that, for a sufficiently large
λ, αi =π0 if i∈I+ and 1−π0 otherwise. Following the idea of Hastie et al. (2004), the
initial values of λ and α0 denoted by λ0 and α00, respectively are given by
λ0 = 1 2
(1−π0)
∑
i∈I+
(Ki+−Ki−) +π0
∑
i∈I−
(Ki+−Ki−)
and
α00 =−1 2
(1−π0)
∑
i∈I+
(Ki+−Ki−)−π0
∑
i∈I−
(Ki+−Ki−)
,
where Ki+ =K(xi,xi+),Ki− =K(xi,xi−). The indices i+ and i− are defined as
i+ = argmax
i∈I+
{(1−π0)
∑
j∈I+
K(xi,xj)−π0
∑
j∈I−
K(xi,xj)} and
i− = argmin
i∈I− {
(1−π0)
∑
j∈I+
K(xi,xj)−π0
∑
j∈I−
K(xi,xj)}.
It is possible to initialize the algorithm at anyπbetween 0 and 1 rather thanπ0, however,
we empirically observe that the initializedλ is the largest when π=π0. Notice that the
corresponding solution is trivial as αi =πi for all i= 1,· · · , n for any λ larger than λ0.
Therefore, the proposed algorithm focuses only on the non-trivial solutions obtained at
Q = {(λ, π) : 0 ≤ λ ≤ λ0,0 ≤ π ≤ 1}. Finally, the three sets initialized at (λ0, π0)
denoted by E0,L0 and R0, respectively are given by
E0 ={i
+, i−}, L0 ={1,· · · , n}\E0, and R0 =ϕ,
where ϕ denotes the empty set.
2.4.2
Update
Recall that, for any point (λℓ, πℓ), no event occurs if (λ, π)∈ Sℓ and the WSVM solution
can be updated by applying Theorem 1 for any (λ, π)∈ Sℓ. Therefore, it is essential to
know how to define Sℓ as large as possible for any (λℓ, πℓ). We shall demonstrate next
have the following inequality constraints to prevent event 1 from happening:
gi1λ+ (gi2+ 1)π ≤tℓi + 1, i∈ E ℓ
+ (2.12)
gi1λ+ (gi2−1)π ≤tℓi, i∈ E
ℓ
−, (2.13)
where tℓ
i =gi1λℓ+gi2πℓ−αℓi, E+ℓ =Eℓ∩I+ and E−ℓ =Eℓ∩I−. In a similar way, we have
the following inequalities to prevent event 2:
gi1λ+gi2π≥tℓi, i∈ E
ℓ. (2.14)
In order to prevent event 3, we have yif(xi) < 1,∀i ∈ Lℓ and yif(xi) > 1,∀i ∈ Rℓ.
Therefore, by noting (A.1), we have
(hℓ1(xi)−1)λ+h2ℓ(xi)yiπ ≤sℓi, i∈ R
ℓ (2.15)
(hℓ1(xi)−1)λ+h2ℓ(xi)yiπ ≥sℓi, i∈ L
ℓ
, (2.16)
where sℓ
i = yi(hℓ1(xi) −fℓ(xi))λℓ +hℓ2(xi)yiπℓ. We remark that the equalities do not
need to be strict since an eventis instant transition. Recall that it is enough to consider
the solution on Q and hence the additional constraints 0 ≤ λ ≤ λ0 and 0 ≤ π ≤ 1
should be considered as well by default. In summary Sℓ can be defined by a subregion
on the (λ×π)-plane that satisfies all the constraints (2.12)–(2.16). Figure 2.2 illustrates
a Sℓ generated from the initial point (λ
0, π0) for the toy example in Section 2.1. We
remark that Sℓ forms a polygon which can be uniquely expressed by its vertices, since
the constraints are all linear.
We describe next how to determine the vertices of Sℓ in an efficient manner. First,
compute all the pairwise intersection points of the boundaries of (2.12)–(2.16) then we
have nc(nc−1)
2 intersection points, where nc denotes the number of constraints (2.12)–
(2.16),n+|Eℓ|. The left penal of Figure 2.2 shows all the intersections of the boundaries of
the obtained constraints. Then, we can define the vertices by identifying the intersections that satisfy all the constraints (2.12)–(2.16) as illustrated in (b) of Figure 2.2. We denote
the vertices of the Sℓ as {vℓ
1,· · · , vnℓv} where v
ℓ
r = (λr, πr), r= 1,· · · , nv.
There are a couple of issues we need to clarify here. First, based on our limited
experience, we observe that nv is small and typically does not exceed eight. Hence it is
not efficient to compute all the nc(nc−1)
0 1 2 3 4 5
0.0
0.2
0.4
0.6
0.8
1.0
λ
π
3: event2 (E to R) 4: event2 (E to R)
3: event1 (E to L)
4: event1 (E to L) 1,2,5,6: event3
(a) Boundaries of the constraints.
0 1 2 3 4 5
0.0
0.2
0.4
0.6
0.8
1.0
λ
π v1 S0
v2
v3
v4
(b)S0 with 4 vertices (v0
1,· · ·, v04).
Figure 2.2: The illustration of defining S0 generated from the initial point (λ
0, π0) for the toy example in Section 2.1: Each line in the left penal (a) represents a constraint
boundary where anevent occurs as labeled. For example, the upper right label represents
the event: the fourth example moves fromE toR on the boundary. The setS0 obtained
intensity. Note also that some constraints are dominated by others onQand are thus au-tomatically satisfied if other constraints hold. Consequently, we can save a huge amount
of computational time by excluding those constraints which are dominated by others,
especially when n is large. We also need to order the vertices for set-updates which are
discussed next. Here the ordering means that a vertex vℓ
r, r = 1,· · · , nv is adjacent to
vℓ
r−1 and vrℓ+1, where we setv0ℓ =vnℓv, v
ℓ
nv+1 =v
ℓ
1 (see (b) in Figure 2.2). The updating of
α1,· · · , αn as well as α0 at vertices of Sℓ provided is straightforward by Theorem 1.
Figure 2.3 illustrates how to extend the polygons on Q from current Sℓ in Figure
2.2-(b). Notice that the sides ofSℓare determined by some boundaries of the constraints
(2.12) – (2.16) and represent corresponding events. Each middle point of two adjacent
vertices can be used as a new starting point, (λℓ+1, πℓ+1) in Theorem 1 to compute
a new polygon Sℓ+1. Computing middle points and corresponding solutions denoted
by mr = (λℓr+1, πrℓ+1) and ¯αℓr+1 = {(α0, α1,· · · , αn) obtained at mr = (λrℓ+1, πℓr+1)}T,
respectively where r = 1,· · · , nv is trivial due to the piecewise-linearity of the solutions.
The bar sign in ¯αℓ+1
r is used to emphasize the quantities are obtained at middle points,
not vertices. At each middle point, the corresponding three sets denoted by Erℓ+1,Rℓr+1,
and Lℓr+1 respectively can be updated based on which line the middle point mr is on.
For example as shown in (a) of Figure 2.3, the three sets E1ℓ+1,R1ℓ+1, and Lℓ1+1 obtained
at m1 are updated as E1ℓ+1 =Eℓ\{4},R
ℓ+1
1 =Rℓ∪ {4}, and L
ℓ+1
1 =Lℓ. This is because
m1 = (λℓ1+1, π
ℓ+1
1 ) lies on the boundary which represents an event that the element 4
moves to the right set from the elbow set (see (a) in Figure 2.2). Now we have all the
information required to generate a new polygon, S1ℓ+1, from the middle point, m1 and
Sℓ+1
1 can be accordingly computed by treating m1 as a new updating point (This is
the reason why we use a superscript ℓ + 1 to denote middle points). Figure 2.3 shows
all the four newly-created polygons, S1
r, r = 1,· · · ,4 respectively from the four middle
points m1,· · · , m4 of the sides of S0 in Figure 2.2-(b). Notice that the right vertical
line represents λ=λ0 and we do not have any interest beyond it. Finally, the proposed
algorithm can be continued to extend the polygons being searched onQand is terminated
when the complete solution surface is recovered onQ.
2.4.3
Resolving Empty Elbow
Note that either event 1 and or event 2 leads to the possibility that E is empty, named
0 1 2 3 4
0.0
0.2
0.4
0.6
0.8
1.0
Updated polygon from m1
λ
π S11
m1
(a)S1
1 fromm1.
0 1 2 3 4
0.0
0.2
0.4
0.6
0.8
1.0
Updated polygon from m2
λ
π m2 S21
(b)S1
2 fromm2.
0 1 2 3 4
0.0
0.2
0.4
0.6
0.8
1.0
Updated polygon from m3
λ
π S31 m3
(c)S1
3 fromm3.
0 1 2 3 4
0.0
0.2
0.4
0.6
0.8
1.0
Updated polygon from m4
λ
π S41
m4
(d)S1
4 fromm4.
Figure 2.3: The updated polygons S1
r, r = 1,· · · ,4 from the middle pointsm1,· · · , m4
of the sides ofS0 in Figure 2.2 (b): Dotted lines in each subfigure depict the boundaries
Theorem 1 cannot be applied whenE is empty.
We suppose theempty elbow occurs at (λo, πo) and use a superscript ‘o’ to denote any
quantity defined at (λo, πo). In order to resolve the empty elbow, we first notice that the
objective function (1.4) is differentiable with respect to b and αi, i= 1,· · · , n whenever
the the elbow set is empty since in this case there is no example satisfying yif(xi) = 1.
Taking derivative of (1.4) with respect to b and αi, we get two conditions to be satisfied
under the empty elbow: i) πo = |Lo+|/|Lo|, where Lo+ = Lo∩I+ and ii) αi are unique
while α0 is not. Moreover, α0 can be any value in the following interval,
[aL, aU], [
max
i∈Lo −∪Ro+
moi, min
i∈Lo
+∪Ro−
moi
]
(2.17)
where moi = yiλo−
∑n j=1α
o
jyjK(xi,xj); and Lo−, Ro+, and Ro− are similarly defined as
Lo
+. Recall that α0 is continuous and hence the empty elbow can be resolved only by
α0 touching one of the two boundaries aL and aU. Notice that the α0o is regarded as
a starting point where the empty elbow begins and hence it must be one of aL and
aU. Without loss of generality, we suppose αo0 = aL then the empty elbow should be
resolved when it becomes the other boundary aU. Let ioL = argmaxi∈Lo
−∪Ro+m o i and
io
U = argmini∈Lo
+∪Ro−m
o
i, then the E should be updated to {ioU}. The L and R are
accordingly updated as well since the updated index ioU enters to the E from one of the
two sets. In case ofαo0 =aU, we update in a similar way which leads to E ={ioL}.
2.4.4
Pseudo Algorithm
Combining the previous several subsections, we now summarize our WSVM solution
surface algorithm at Algorithm 1. We denote α = (α0, α1,· · · , αn)T for simplicity. We
note that the proposed algorithm computes the complete WSVM solution αs for any
(λ, π) ∈ Q without involving any numerical optimization. We have implemented the
algorithm in R language and the wsvmsurf package is available from the authors upon
request (and will be available on CRAN soon).
2.5
Computational Complexity
The essential part of the proposed algorithm involves several steps. First, we solve the