G-AODV: A Novel Approach to Improve
AODV by Using Genetic Algorithm in VANET
Chanchal Garg1, Bhawna Wadhwa2
M.Tech. Student, Department of CSE, B.S.Anangpuria Institute of Technology and Management, Faridabad, Haryana,
India 1
Asst. Professor, Department of CSE, B.S.Anangpuria Institute of Technology and Management, Faridabad, Haryana,
India2
ABSTRACT: Vehicular ad-hoc networks (VANET’S) are self-organizing, decentralized networks capable of adapting of building a network without depending on any static infrastructure. In reactive protocols a node describing to route discovery procedure and also known as on demand distance vector routing. The protocols are two kinds of procedures of “route discovery” and “route maintenance”. Shortest path issue in VANETS asks for the path computation from source node to destination node that decreases the sum of total cost linked with the path. Many conventional algorithms like Dijkstra’s Algorithm, Bellman ford Algorithm are developed to discover the shortest path. These algorithms are not appropriate for VANETS, but are appropriate only for wired networks. For wireless networks, biologically encouraged algorithms i.e. Genetic Algorithm (GA) and Evolution Algorithm (EA) can be implemented effectively. Genetic algorithm is used with different routing protocols. Several routing protocols are Ad hoc On demand Distance Vector (AODV), Dynamic Source Routing(DSR), Ad hoc On demand Multipath Distance Vector(AOMDV), Destination Sequenced Distance Vector Routing (DSDV). Genetic Algorithm when used with AODV offers the best results with respect to performance. This paper introduced for solving the optimal (Best) path routing issue utilizing genetic algorithm. Genetic algorithm is a programming techniques and emergence of problem solving technique. The genetic algorithm then measures every candidate to fitness function. This algorithm is suitable of the searching algorithm. The introduced genetic algorithm utilizing best optimum path between source nodes and destination nodes in ad hoc networks and measure fitness function for bandwidth and cost. Genetic algorithms are a specific class of evolutionary algorithms that utilize mechanisms motivated by evolutionary biology i.e. mutation, inheritance, selection, and crossover (also called recombination).
I. INTRODUCTION
Vehicular ad-hoc networks (VANET’S) are self-organizing, decentralized networks capable of adapting of building a
network without depending on any static infrastructure.These networks permit spontaneous formation and deformation
of mobile networks, describing an ad hoc network as a vehicles autonomous system linked by wireless connections. A routing algorithm should use to discover a shortest route for transmission packet ad hoc network characteristics are flexibility and mobility, peer-to-peer multi-hop networks. Routing in mobile ad hoc networks is based on several factors for configuration; find optimum path selection of routers. Ad hoc network utilizes two different kinds of protocols. Proactive protocol in a VANET should keep track of routes in all nodes target. This protocol manages routing table information and also known as table-driven protocol
low bandwidth, power consumption and communication limits, etc. So it is significant that the route lifecycle should remain stable in a routing procedure in VANET.
II. PROPOSED AD HOC NETWOK WITH GENETIC ALGORITHM
Ad hoc network can be shown as a linked graph with N nodes. The optimization metric is path cost between the source and destination node. The sum of cost of individual hops is total cost. The objective is to discover the path with least total cost between source node and destination node utilizing genetic algorithm with simple and efficient way. The path from source node to destination node is a viable solution. Starting a random population of strings is created, which represents viable or unviable solutions. Unviable solutions are strings that can’t arrive the destination node. A Chromosome corresponds to possible solution of the optimization issue. Hence every chromosome shows a path which contains sequences of positive integers that show nodes IDs through which a routing path passes with source node adopted by intermediate node to target node. The default maximum chromosome length is equal to the no. of nodes.
2.1 GENETIC ALGORITHM
Genetic Algorithm (GA) is a particular type of stochastic search algorithm that shows the biological evolution as the problem solving method. GA works on the search space known as population. Every element in the population is known as chromosome. GA starts with arbitrarily choosing set of viable solution from population. Every chromosome is a solution by itself. Every chromosome is computed for fitness and this fitness describes the solution quality. GA utilizes adaptive heuristic search method which determines the set of best solution from the population. New offsprings are created /emerged from the chromosomes utilizing operators i.e. crossover, selection and mutation. Most fit chromosomes are moved to next generation. The weaker candidates achieve less chance for moving to next generation. This is because GA depends on the principle of Darwin theory of evolution, which defines that the “survival is the best”. This process iterates until the chromosomes have best fit solution to the provided problem. The summary is that the average fitness of the population increases at every iteration, so by repeating the procedure for several iterations, better results are determined. GA has been broadly studied and experimented on several engineering fields. GA offers alternative techniques for solving problems which are complicated to solve utilizing conventional methods. GA can be used for nonlinear programming i.e. minimum spanning tree, travelling salesman problem, scheduling problem and some others.
Features of Genetic algorithm
The most significant characteristic of genetic algorithms is that they are parallel in nature. They explore solution space in numerous directions at once. GA is appropriate for solving problems where the solution space is large and time consumed to search exhaustively is very high.
GA performs properly in problems with complicated fitness. If the function is noisy, discontinuous, changes
over time or has some local optima, then GA provides better results .
GA has capability to solve problems with no prior knowledge (blind). The GA performance depends on effective representation, evaluation of fitness function and other parameters i.e. rate of crossover, size of population and mutation and the selection strength.
III. PROPOSED AODV PROTOCOL (G-AODV)
3.1 ROUTE DISCOVERY
In this phase when a route is needed from the source node to destination node the source Node does not broadcasts a RREQ message to its neighbouring nodes requesting a route to the target node as it waste a lots of route request transmission packets. Thus It use Genetic Algorithm to discover three optimal solution from several solution in case of huge node density.
3.2Implementation of GA
These sections describe the GA design for the SP problem. The GA design has components such as genetic representation [1], population initialization, fitness function, selection scheme, crossover and mutation. A routing path contains sequence of network nodes. The genetic algorithm is utilized to paths that is been obtained from the route discovery stage. A routing path is encoded by positive integers string that showing the Ids of nodes in the network. The string length should not be greater than the number of nodes existed in the network.
3.3 Choose Initial Population
In GA each chromosome presents a potential solution and this can contain more than one solution in starting. The paths obtained from route discovery phase are considered as initial chromosomes. When starting the population, this algorithm initiates from the SOURCE. SOURCE is a constant in the program, so the user may wish to pick another node as the starting point. The algorithm selects one of the neighbours provided that it has not been picked before. It keeps performing this operation until it reaches to DESTINATION. Like SOURCE, DESTINATION is also a constant that user may change as they wish.
A module is used to generate all possible paths from a given node to all other network nodes. In starting, N random paths are considered (chromosome). This N represents the population size. These chromosomes act as population of first generation.
Figure 1: Selection of chromosomes from random generated population
3.4 Evaluate the fitness of each individual in the population
For an obtained solution we should be able to evaluate its quality accurately which can be done with the help of fitness function. Our purpose of using this GA is to find the shortest path, It is important to obtain the shortest path and minimum delay time as the main concern then It can choose according to the size of buffer. The fitness of each chromosome can be calculated as,
Fitness = no of hops in path * 10 – total cost of path
No. of hops explains the number of intermediate nodes traversed along the path from source node to target node and total cost is the sum of cost of individual links in the path
Figure 2 : Sample Network Topology
Table 1: The Cost on links
The values 999 represents that there is no direct link between these nodes. 999 is a large value as compared to other costs.
3.5 Selection Scheme:
Selection plays an important part in improving the average quality of the population by moving the high quality chromosomes to the next generation. The selection of chromosomes is based on the fitness value.
3.6 Tournament Selection:
Tournament selection is possibly the most famous selection technique in genetic algorithm because of its simple implementation and efficiency. In tournament selection, n individuals are chosen arbitrarily from the larger population, and the chosen individuals compete against one another. The individual with the greatest fitness wins and will be involved as one of the next generation population. The no. of individuals competing in every tournament is called as tournament size, generally set to 2 (also known as binary tournament). Here the tournament size, Ts is set to three, which mean that three chromosomes competing one another. Only the best chromosome between them is chosen to recreate.
Figure 3: Selection strategy with tournament mechanism
3.7 Crossover : Crossover checks the current solutions for determining better ones. Physically, the role of exchanging one part of two choosing chromosomes in such a manner that the GA generates new chromosomes from previous generation by interchanging part of them.
3.8 Mutation: Mutation helps GA keep away from local optima. Chromosomes are shown by the path structure, here a single point crossover mechanism to exchange partial chromosomes (sub-path) at positional independent crossing sites between two chromosomes.
Figure 5: Overall procedure of the mutation
3.9 Evaluate the individual fitness of the offspring It will send these offspring to the evaluation function to get their fatnesses. If the offspring’s’ fitness are less in comparison of nodes with greatest fitness in the population, It will replace them with the nodes with the greatest fatnesses.
3.10 Terminating Condition
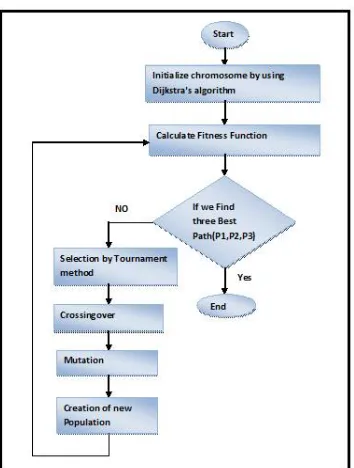
Its terminating condition is three best routes (P1, P2, and P3). Because, in the network topology, the aim is not to find the global optimum, but to find a path with a reasonable cost in a limited time.
Figure 6: Proposed Route Discovery Flow Diagram
3.11 ROUTE REPLY
When the target node obtains three best chromosomes, it records obtained RREQ in its cache end of Route Request TTL. Introduced protocol stores every connections cost beside the IP addresses. When the Route Request TTL has been completed, the target node adds three obtained chromosomes in Genetic Algorithm and discovers the two best routes from source node to target node. The destination node generates a Route Reply packet, adds these two routes in it and forwards the RREP packet for the source node.
Figure 7: Proposed Route Reply Flow Diagram
When the Route Request TTL has been completed, the destination node adds all obtained RREQs in Genetic algorithm and determines the two best routes from source to destination node. The destination node generates a Route Reply packet, adds these two routes in it and forwards the RREP packet to the source.
IV. CONCLUSION
VANET (Vehicular Ad-hoc Network) is a novel technology which has taken tremendous care in the last few years. It is the particular kind of MANET which has the high mobility, dynamic and self-organized in behaviour. In this, Vehicles behave as nodes to exchange data. The general task of VANET is to offer information about Road-blockage, Traffic- jams and effective path which reduce the traveller time. To obtain these purposes, algorithms must be effective. GA is
appropriate for solving problems where the solution space is large and time consuming tosearch exhaustively is very
high. As the network sizeincreases, the possible solutions for transmitting databetween two nodes increase. Joining of few new nodes inthe network increases the search space size exponentially.So, GA is appropriate for routing issue as it exploressolution space in various directions at once and lesspossibility to achieve local optimum.GA has capability
to solveproblems with no prior knowledge. The GA performance depends on effective representation, population size,
evaluation of fitnessfunction, mutation, crossover rateand the selection method.The introduced mechanisms use the
REFERENCES
[1] Himanshu Saini, Rajarshi Mahapatra, “Implementation and Performance Analysis of AODV Routing Protocol in VANETs”, International
Journal of Emerging Science and Engineering (IJESE) ISSN: 2319–6378, Volume-2, Issue-3, January 2014.
[2]Kahina Ait Ali, Oumaya Baala, Alexandre Caminada, “Routing Mechanisms Analysis in Vehicular City Environment”,IEEE, 2011.
[3] Hussein A. Lafta and Ahmed M. M. S. Al-Salih, “Efficient Routing Protocol in the Mobile Ad-hoc Network (MANET) by using Genetic Algorithm (GA),” IOSR Journal of Computer Engineering (IOSR-JCE), Volume 16, Issue 1, Ver. III (Jan. 2014), PP 47-54.
[4] Haiqing Liu, Licai Yang, Yao Zhang, “Improved AODV routing protocol based on restricted broadcasting by communication zones in large-
scale VANET”, Springer, pp. 857-872, 2015.
[5]Yatendra Mohan Sharma and Saurabh Mukherjee,“Comparative Performance Exploration Of AODV, DSDV & DSR Routing Protocol In Cluster
Based VANET Environment”, International Journal of Advances in Engineering & Technology, Vol. 4, Issue 2, pp. 120-127, Sept 2012.
[6]Ahyoung Lee, Charlemagne G. Laviña, Jonathan Caballero, Ilkyeun Ra,”Performance Analysis of Ad Hoc Routing Protocols based on Selective
Forwarding Node Algorithms”, International Conference on Information Science & Applications (ICISA),IEEE, 2013.
[7] Mohammed, A. A., and Nagib, G. Optimal Routing In Ad-Hoc Network Using Genetic Algorithm. International Journal for Advanced Networking and Applications 1323 Volume: 03, Issue: 05, pp. 1323-1328, 2012
[8]Arzoo Dahiya and Dr. R.K. Chauhan, “Experiment Analysis of AODV and DSR with varying Vehicle Mobility And Density in VANET Scenario”, International Journal of Network Security & Its Applications (IJNSA), Vol.5, No.4, pp. 65-70, July 2013.
[9] Shouzhi Xu,Pengfei Guo, Bo Xu, Huan Zhou, “QoS Evaluation of VANET Routing Protocols”, Journal Of Networks, Vol. 8, No. 1, pp. 132-139,
January 2013.
[10] D.Suresh kumar , K.Manikandan and M.A.Saleem Durai,” Secure On-Demand Routing Protocol for MANET using Genetic Algorithm” ,International Journal of Computer Applications, Volume 19, Issue No.8, April 2011,PP 29-34.
[11] Tajinder Kaur, A. K. Verma, “Simulation and Analysis of AODV routing protocol in VANETs”, International Journal of Soft Computing and Engineering (IJSCE) ISSN: 2231-2307, Volume-2, Issue-3, July 2012.
[12] Shengxiang Yang, Hui Cheng, and Fang Wang, “Genetic Algorithms With Immigrants and Memory Schemes for Dynamic Shortest Path Routing Problems in Mobile Ad-hoc Network”, IEEE transaction on System, Man, and Cybernetics-Part C: Application and Reviews, vol. 40, no. 1, pp.52-63,January, 2010.
[13] Siwach, V., Singh, Y., and Seema, D. D. B. An Approach to Optimize QOS Routing Protocol Using Genetic Algorithm in MANET. IJCSMS International Journal of Computer Science and Management Studies, Vol. 12, Issue 03, pp. 149-153, 2012.
[14] Himanshu Saini, Rajarshi Mahapatra, “Implementation and Performance Analysis of AODV Routing Protocol in VANETs”, International
Journal of Emerging Science and Engineering (IJESE) ISSN: 2319–6378, Volume-2, Issue-3, pp. 24-29, January 2014.
[15] Ammar Odeh, Eman AbdelFattah and Muneer Alshowkan, “Performance Evaluation Of AODV AND DSR Routing Protocols In MANET Networks”, International Journal of Distributed and Parallel Systems (IJDPS) Vol.3, No.4, pp. 13-22, July 2012.
[16] S. Mardle S. Pascoe, “An overview of genetic algorithms for the solution of optimization problems”, Computers in Higher Education Economics Review (CHEER) vol. 13, pp. 16- 20,1999.
[17] Thodeti Srikanth, Dr.V.B.Narsimha, “Simulation-based approach to performance study of routing protocols in MANETs and ad-hoc
Networks”, IJCSNS International Journal of Computer Science and Network Security,Vol. 11 No.9, pp. 111-115, September 2011.
[18] Anjum A. Mohammed, Gihan Nagib, “Optimal Routing In Ad-Hoc Network UsingGenetic Algorithm”,Int. J. Advanced Networking and Applications, vol. 03, Issue. 05, pp. 1323-1328, 2012.
[19] Ashutosh Lanjewar, Neelesh Gupta, “Optimizing Cost, Delay, Packet Loss and Network Load in AODV Routing Protocol”, (IJCSIS)
International Journal of Computer Science and Information Security,Vol. 11, No. 4,April2013.