Abstract—The paper employees use of master slave configuration of the wireless nodes. The master slave configuration is an efficient method to build a model which consists of numerous commands as this enables segregation of one task from the rest. This configuration allows all the slaves to re-energize as the slaves are programmed to accept only certain commands while rejecting the rest. The rejected commands from one slave are accepted by the next slave thus making sure that all the commands are attended and non of the slaves are drained and have sufficient time to recharge. The cluster of nodes use a PIC
microcontroller to build a smart LAN based wireless sensor network. With the PIC microcontroller working as the brain for the model we control the movement, sensing and collection of data for the node and transfer it to a local area network (LAN) thus making it accessible
and real time representation of the data. The implementation uses 3 nodes one Master and two Slaves, the master node is responsible for broadcasting commands that instruct the slave nodes to perform in predefined modes and collect data from the surroundings. The slave nodes are responsible for the collection of data and forward this data to the LAN. The collected data is
transmitted to a LAN which is accessible by the users in order for them to get updated about their surroundings.
Index Terms—Wireless sensor Network, Robotics, Internet of Things, Local Area Network, Wireless nodes, Sensors,
Master-Slave.
I. INTRODUCTION
A Wireless sensor network(WSN) generally used to define the network of nodes in collective sense and can control the structure and enable communication between them. In the new era we shift the wireless
(RF), Zigbee, Bluetooth Low Energy, and Z-Wave [1]. It would not be wrong to say that, mobile platform has become an extremely important tool on which all humanity from young to old cannot give up and depend on immensely. Hence designing an application made on this platform will be more interesting, productive and more useful for them. Robots are being used in our everyday life and also in industrial applications, these robots are controlled wirelessly or they may be wired [2][3][4]. The robots we build mechanically have limitations in the form of wires and external wire connections as this restricts their movements, this issue can be eradicated by using wireless sensor network [5].
Wireless sensor networks are built with the help of nodes that study the surroundings collect data and analyse it, these nodes are used in real time applications for detections, monitoring, node localization etc. A WSN contains low powered devicesnamed sensor nodes called motes. The architecture for WSN follows the open systems interconnections model (OSI architecture model). The WSN architecture has 5 layers and 3 cross planes. Usually in a sensor network we require 5 layers which are network, application, transport, data link and physical layer.
The 3 cross planes are namely power management, mobility management and task management.
This paper describes an implementation of a group of miniature wireless robots we can also be called as wireless nodes, designed with the objective of communicating with the surroundings and collecting real time data which is shared with the host and available on a LAN for the users to access it[6][7][8][9].
Daily world applications like factories, wearable devices employ the use of sensors for collection data which is either transmitted to the server or used as input data for further calculations and real time analysis. These sensors are simple devices that convert physical variables to electrical signals (Analog to Digital conversion), the electrical signals are transmitted to the receiver and converted back the data back to Analog form. The ability of a sensor to detect and comprehend its surroundings is employed in numerous network applications with enormous potential benefits for scientific implementations. Embedding our surroundings with multiple networked sensors can enable easy monitoring, long- term data collection at scales and resolutions that are difficult to obtain otherwise, the direct contact of a sensor with the environment enables us to
Smart Nodes in LAN by using Wireless
Sensor Network
ISSN: 2277 – 9043 International Journal of Advanced Research in Computer Science and Electronics Engineering Volume 7, Issue 6, June 2018
In order to physically implement dense wireless sensor networks that are capable of recording, and transmitting environmental data, a complete system composed of communication protocols, sampling mechanisms and power management systems must be developed.[10][11][12]
It is quite difficult for an independent robot/node to fulfil the demands of an intelligent system. Networked robot connects a group of the robots by wireless network which makes it possible for the robots to have capabilities of remote operation and management, so the multi-robots cooperation becomes possible. In order to solve the deficiencies in resource constrained, communication disability and the lack of learning ability, which exist in networked robots and standalone robots, a LAN based cluster of robots is devised. The hardware model has 2
layers of architecture: node to node and node to
LAN[13][14][15].
II. SMART SENSORS AND WIRELESS SENSOR NETWORKS
A combination of smart sensors and wireless sensor networks is what makes our implementation possible. Wireless sensor networks are made with the help of numerous smart sensors all of which are synced together to bring into existence the functions of the wireless sensor network.
The paper makes use of smart sensors that are a part of a wireless network, the primary purpose of the sensors is to collect data from the surroundings. The smart sensors and their network employed in our implementation are used to record the temperature of the surroundings at different geographical positions and transmit this recorded data to the local area network to make it accessible for all the users. In this way we can get a real time analysis of the temperature in various location and this temperature can be used to study the weather. This method not only makes it easy for the users to collect data from multiple locations but also this data acts as an offhand information for data analysis and for understanding the climatic conditions of that area.
III. SYSTEM ARCHITECTURE
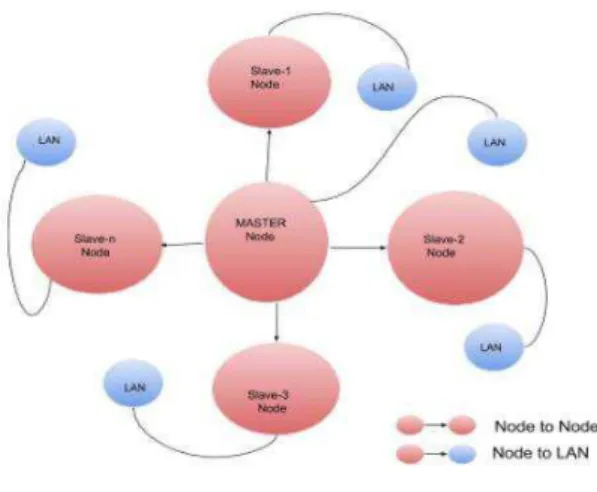
The system adopts two layers architecture: 1) Node to Node 2) Node to LAN. The node to node architecture consists of 1- Master Node and 2-Slave Nodes. The nodes are connected in a STAR topology which is unidirectional in nature, as the data flows from Master to Slaves in the form of commands and from the Slaves to the LAN in the form of collected data. All the nodes are interconnected and connected to the LAN individually.
The Master node is used for broadcasting the commands to the slave in succession through Radio Frequency transmitter. The slave nodes receive the commands from the master using Radio Frequency Receiver and act accordingly. Next, we describe the Node to LAN Architecture, with the help of this architecture we are communicating with the nodes via Bluetooth for detection, monitoring, node localization etc. System Architecture, is represented byFig-1
Fig-1: System Architecture
IV. FUNCTIONAL DESCRIPTION
Fig-2a: Master Node
Fig- 2b: Slave Node
Today wireless sensor networks is the most sought after technology, beat, communications, industrial applications, automation and control industry all use wireless sensor
A. Functional Description of Master Node
The Master is based on the PIC microcontroller which is the brain of the node, the master receives commands from the user and broadcasts these commands via RF transmitter, simultaneously the Master also collects real time data from the surroundings and updates this data on the wireless local area network via Bluetooth, this data can be accessed by the user anytime. The first task is to initialize the master, initialization of the master refers to the broadcasting the commands. The master has 4 buttons (Button-1, Button-2, Button-3, Button-4), each of which denotes a specific command. Each command orders the slave to work in a particular mode. On pressing a button the master broadcasts the specified command via radio frequency. The master continuously broadcasts commands to its slaves and receives real time data.
B. Functional Description for Slave Nodes
The slaves use an RF receiver which is used to receive commands broadcasted by the Master and start working in the specified mode. The slaves are programmed to receive a set of particular commands and reject the rest, while the other slave accepts certain commands and rejects the commands accepted by the slave 1. This way a command will never go unnoticed. Also this allows the slaves to reenergize it self and it prevents accumulation od commands in a queue. The slaves collect real time data from the surroundings with the help of temperature sensors and upload the data on a wireless local area network just like its Master Node.
Master Slave-1 Slave-2
Command-1 LFR MODE Reject
Command-2 Reject Phototropic Mode
Command-3 Photophobic Mode Reject
Command-4 Stop Stop
Table 1: Node to Node Communication through Radio Frequency
The master allows 3 modes in which the slaves are supposed to operate. These modes are clearly stated in Table 1. The master broadcasts commands for the slaves to act accordingly, these commands contain information that which mode is to be activated on a particular slave.
The slaves are synchronized in such a manner that a certain command when accepted by Slave 1 will activate a particular mode and simultaneously the Slave 2 will reject that command
implementation. The above table depicts the wireless communication between nodes (mater and slaves) which is facilitated by the RF sensor.
When the master is broadcasting commands to control the recording of data and mode select it also collects data from the environment simultaneously. This data if not shared or not made available to the user will be useless, to share this data with the user a Bluetooth module is used that transfers the real time data to a wireless local area network which is accessible to the user.
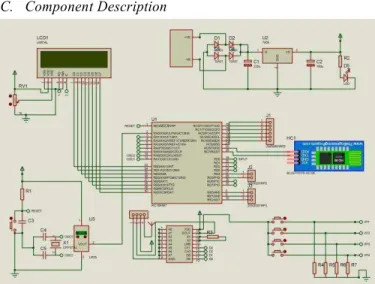
C. Component Description
Fig- 3:Master Schematic
The master configuration involves the use of the PIC microcontroller which is responsible for broadcasting the commands generated by the user via RF module, the sole purpose of employing the RF module for transmission is to enable the user work over a specific frequency. The RF module used, works at a frequency of 433MHz also the power consumption is very low thus making the broadcasting of commands extremely efficient.
ISSN: 2277 – 9043 International Journal of Advanced Research in Computer Science and Electronics Engineering Volume 7, Issue 6, June 2018
Fig-4:Slave Schematic
The master broadcasts commands in a row and the slaves accept certain commands and reject the rest which are further accepted by the following slaves, the command to be selected by the slave is predefined by the user thus making a certain command recognizable to a certain slave and the other slaves reject this command as they are not able to recognize the instruction given under that particular command. This causes the slaves to work in an efficient manner as at no point of time is a slave burdened with series of commands piling up and this gives the slave ample amount of time to reenergize its battery in order to acknowledge the successive commands.
PIC Microcontroller
PIC Microcontroller is 8 bit µC and designed by Microchip technology are likely the best choice for beginners. ThisµC is used in various applications such as machine control device, automation, etc. [16]
Bluetooth Module (HC-05)
Bluetooth is part of wireless sensor network used for serial communication, and developed for transparent wireless serial connection setup.
Serial Bluetooth module qualifies as v2.0+Enhance data rate 3 Mbps Modulation with complete 2.4 GHz transceiver and Bluetooth module HC-05.
Radio Frequency Module
RF Module is also a part of wireless sensor networks; this is used for transmission and reception the data through radio frequency. The main advantages of RF module, this is very efficient for serial communication at low cost. The range of RF module up to 100 meters distance in open space. [17]
Motor Driver IC
Motor driver L2939D IC is basically used for driving DC
motors, this IC allows the DC Motors to run in either clockwise direction or counter-clockwise direction. This IC depends upon two H-Bridge. The H-Bridge causes the motors run in either clockwise direction or counter-clockwise direction independently. H-Bridge is a circuit that can allow the voltage flow in the circuit in pre defined directions. [2].
L293D
The motor IC is used to drive DC motors in clockwise as well as in anti-clockwise direction. H bridge is the principle of it’s working hence current is allowed to flow in either direction. Due to it’s handy size this IC is frequently used in robotics.
DC Motors
DC motor is used as wheels drive machines and by using simple control of motor driver IC L293D with PIC Microcontroller. The motion of motor is either in clockwise direction or anticlockwise direction which can be controlled easily by changing polarity of the input voltage. [18]
Temperature Sensor
Temperature is the most common sensor and used for measuring the associated parameter in real time. Temperature sensor is basically a semiconductor device and used for detection and monitoring environmental condition such as Heat and cold. There are various types of temperature sensor are available according to specific application. In this project we are used an LM35.
V. EXPERIMENTAL RESULT & AND HARDWARE
IMPLEMENTATION
Hardware Implementation
The Fig-5 shows the hardware implementation of the paper, this includes 2 slaves and a master. The Mater Node (Left most), Slave-1 (Middle) & Slave-2 (Right Most).
time data on a wireless local area network.
Fig-6(a) Fig-6(b)
Fig-6(c)
While the Master broadcasts commands and simultaneously collects data, the slave nodes on receiving the broadcasted commands act accordingly and collect data which is transmitted along with the data collected by the Master over the LAN using Bluetooth technology. This data when viewed by the user is seen as shown in Fig-6. The Fig-6(a) shows the data collected by Slave-1 and it’s response to the commands it does not recognize, similarly Fig-6(b) shows the data from Slave-2 and it’s response to the commands it does not recognize. Fig-6(c) displays the output from the Mater node which broadcasts the commands ordering the slaves to work in one particular mode. TheFig-6 also shows the temperature that has been recorded by the nodes from their respective areas of deployment.
VI. APPLICATION AND FUTURE SCOPE
This combination of master slave nodes can be implemented in industries, biosphere reserves and many other natural habitats to keep a close monitoring of the changes in the environment. The implementation provides a major boost to the idea of automation as the nodes require minimum human interference and this reduces the chances of human error.. The data collected with the help of nodes implemented can be used to analyse the climatic changes in an area and also these readings could be used to understand the present conditions. The implementation has immense scope of improvement as more sensors like humidity sensors, ppm sensors, wind speed
sensors can be implemented with the help of wireless sensor networks in order to get a detailed report of the surrounding environment. Also the nodes can be implemented according to specific topology whose need resides upon the type of application. The radio frequency can be altered as it is module dependent, hence in situation where a higher data rate is required, a module capable of producing a higher frequency will be deployed. WSN can also be implemented to gain a thorough understanding of the environment and the various factors that pollute it. The fault tolerance in sensor nodes is quite high as failure of one sensor node wont lead to failure of the entire system and neither will the inaccuracy of a single node cause the corruption of the entire system of nodes. Sensor nodes have a wide range od communications as they can communicate via ultrasound, infrared, radio frequencies with varying data rates.
VII. CONCLUSION
The hardware implementation clearly shows a master slave combination to collect data from the surrounding environment and with the help of mobile slave nodes and make this data available to the user. The main motive of this paper is to make the collected data available to the common people in original adulterated form. Also because of its small size and portability, it can be used in any kind of surrounding for real time analysis of the environment. As the slaves are pre programmed to accept certain commands and reject the rest which are further accepted by the following slaves the system becomes highly efficient as at no point of time the commands are piled up or have to form a queue to be implemented and the slaves have ample amount of time to reenergize themselves after executing a certain command and respond to the next command.
REFERENCES
[1] Internet of things:Wireless sensor network “international electrotechnical commission-White paper”.
[2] Android based wifi controlled robot using Rasberry Pi, by Mehmetcan Gule3ci1, Murah Orhun2 Computer Engineering Department Istanbul Bilgi University,
Turkey.978-1-5836-0930-9/17/$31.00 c 2017 IEEE,(UBMK’17) 2nd International Conference on Computer Science and Engineering
[3] G. S. Bastos, C. H. C. Ribeiro, and L. E. de Souza, “Variable utilityin multi-robot task allocation systems,” in Robotic Symposium, 2008.LARS’08. IEEE Latin American. IEEE,
ISSN: 2277 – 9043 International Journal of Advanced Research in Computer Science and Electronics Engineering Volume 7, Issue 6,June 2018
[4] L. Turnbull and B. Samanta, “Cloud robotics: Formation control of amulti robot system utilizing cloud infrastructure,” in Southeastcon, 2013Proceedings of IEEE. IEEE, 2013, pp. 1–4.
[5] D. Niyato, P. Wang, and E. Hossain, “Reliability analysis and redundancy design of smart grid wireless communications system for demand side management,” IEEE Trans. Wireless
Communications,vol. 19, no. 3, pp. 1536-1284, July 2012.
[6] Wireless sensor networks F.L LEWIS
[7] R. Dawkins, O. Holland, A. Winfield, P. Greenway, A. Stephens, An interacting multi-robot system and smart environment for studying collective behaviours, Proceedings of the Eighth International Conference on Advanced Robotics, Monterey California, 1997.
[8] P.T. Davies, C.R. McGuffin, Wireless Local Area Networks, McGraw-Hill, New York, 1995.
[9] The application of wireless local area network technology to the control of mobile robots A.F.T. Winfield*, O.E. Holland Intelligent Autonomous Systems (Engineering) Laboratory, Faculty of Engineering, University of the West of England,
Bristol, Frenchay, Bristol BS16 1QY, UK Received 16
September 1999; received in revised form 30 November 1999; accepted 15 December 1999
[10] Analysis of Wireless Sensor Networks for Habitat Monitoring by Joseph Polastre Robert Szewczyk Alan MainwaringDavid Culler John Anderson
[11] Yinong Chen and X. Bai, "On Robotics Applications in Service-Oriented Architecture", The 28th IEEE International Conference on Distributed Computing Systems, ADSN Workshops, pp. 551-556.
[12] Hegazy, T.; Hefeeda, M. "Industrial Automation as a Cloud Service", Parallel and Distributed Systems, IEEE Transactions on, On page(s): 2750 - 2763 Volume: 26, Issue: 10, Oct. 1 2015.
[13] J. Kerr and K. Nickels, “Robot operating systems: Bridging the gap between human and robot,” in System Theory (SSST), 2012 44th Southeastern Symposium on. IEEE, 2012, pp. 99– 104.
[14] S. Cousins, “Exponential growth of ros [ros topics],” Robotics & Automation Magazine, IEEE, vol. 18, no. 1, pp. 19–20, 2011
[15] Kehoe, B.; Patil, S.; Abbeel, P.; Goldberg, K. "A Survey of Research on Cloud Robotics and Automation", Automation Science and Engineering, IEEE Transactions on, On page(s): 398 - 409 Volume: 12, Issue: 2, April 2015
[16] Puri, V.; Nayyar, A. "Real Time Smart Home Automation based on PIC Microcontroller, Bluetooth and Android Technology", International Conference on Computing for Sustainable Global Development IEEE, 2016
[17] Deb, S.; Rokky, J.; Mallick, T.; Shetara; J. "Design and Construction of an Underwater Robot", Proceedings of the 4th International Conference on Advances Electrical Engineering (ICAEE) IEEE, 2017.
[18] Aung, W. "Analysis on Modeling and Simulink of DC Motor and its Driving System Used for Wheeled
Mobile Robot", World Academy of Science, Engineering and Technology International Journal of Electrical and Computer Engineering Vol:1, No:8, 2007
[20] D. Xuxing, X. Fangfang, W. Qing, “Energy-Balanced Clustering with Master/Slave Method For Wireless Sensor Networks” The Ninth International Conference on Electronic Measurement & Instruments ICEMI’2009.
[21] W. Heinzelman ,A. Chandrakasan, H. Balakrishnan, “ Energy-Efficient Communication Protocol for Wireless Microsensor Networks”Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, Hawaii, USA, 2000(8): 1-10.
[22] Younis O, Fahmy S. HEED: A Hybrid, Energy-Efficient, Distributed Clustering Approach for Ad hoc Sensor Networks. IEEE Transactions on Mobile Computing, 2004, 3(4): 366-379.
[23] Mirko Franceschinis, Luca Gioanola, Massimiliano Messere, Riccardo Tomasi, Maurizio A. Spirito1, Pierluigi Civera, “Wireless Sensor Networks for Intelligent Transportation Systems” IEEE 2009
[24] Qi Hao, D. J. Brady, B. D. Guenther, J. B. Burchett, M. Shankar, S. Feller, “Human Tracking with Wireless Distributed Pyroelectric Sensors”, in IEEE Sensors Journal, Vol. 6, No. 6, December 2006.
[25] Xue Yingcheng, Tai Nengling, Liu Liqun, et al. "Co-operation control strategies for island Microgrids". Electric Power, Vol 42, No 7,
2009, pp: 36-40.
[26] Liu Zeng, Liu Jinjun. "A Control Method for 3-Phase Inverters Enabling Smooth Transferring of the Operation Modes of Distributed Generation System". Transactions of China Electrotechnical Society, Vol 26, No 5, 2011, pp: 52-61.
VARUN GOYALis a final year B.Tech student in Electronics and Communications Engineering at Maharaja Surajmal Institute of Technology affiliated to Guru Gobind Singh Indraprastha University, Delhi.