Logic for coalitions with bounded resources
∗Natasha Alechina and Brian Logan and and Nguyen Hoang Nga and Abdur Rakib School of Computer Science
The University of Nottingham Nottingham, NG8 1BB, UK {nza,bsl,hnn,rza}@cs.nott.ac.uk
July 7, 2010
Abstract
Recent work on Alternating-Time Temporal Logic and Coalition Logic has allowed the expression of many interesting properties of coalitions and strategies. However there is no natural way of expressing resource require-ments in these logics. In this paper we present a Resource-Bounded Coali-tion Logic (RBCL) that has explicit representation of resource bounds in the language. We give a complete and sound axiomatisation ofRBCL, a pro-cedure for deciding satisfiability ofRBCLformulas, and a model-checking algorithm.
1
Introduction
Recent work on Alternating-Time Temporal Logic ATL and Coalition Logic CL, for example, [13, 10, 14, 7, 17], has allowed the expression of many interesting properties of coalitions and strategies. However, there is no natural way of ex-pressing resource requirements in these logics. For example, there is no easy way to verify properties of the form ‘a set of agentsCcan achieve a state of the world satisfyingϕunder the given resource boundb’. Essentially, this is thesuccessful coalition under resource bound problem investigated by Wooldridge and Dunne in [18]. However, unlike Wooldridge and Dunne, we consider multi-shot games where the agents need to perform asequenceof actions to achieve the goal. As a motivating example, consider a system of distributed reasoning agents as described
∗
in [2, 6]. Agents’ actions involve inferring new clauses from their knowledge bases and communicating derived clauses to other agents. Clearly these activities require resources such as time (which can be identified with the number of inference steps), memory (the space required to store premises in reasoning, and any intermediate lemmata, which can be measured as the number of clauses in the agents memory at any one time) and communication bandwidth (which can be measured as the num-ber of communicated clauses). Properties of interest for such systems may include ‘the set of reasonersC can derive the clause[p]under the resource bound 10 for time, 3 for memory and 2 for communication’. In general, we would like to be able to express properties of systems where the abilities of individual agents and coalitions of agents are constrained by available resources in a non-trivial way.
In this paper we present a sound and complete logic, RBCL, in which we can express the costs of (multi-step) strategies and hence coalitional ability under resource bounds in multi-shot games. The logic is sufficiently expressive to for-malise, e.g., the decision problems for Coalitional Resource Games discussed in [18] and the properties of resource-bounded communicating reasoners investigated in [2]. We show how to verify properties expressed inRBCL and give a model-checking algorithm forRBCL. While there has been work on introducing resource bounds into temporal logic [9], we believe that our contribution presents a signif-icant advance on this work. In [9], a logic RTL∗ is introduced, which is CTL∗ extended with quantifiers representing the cost of paths. However using CTL∗ as a starting point means that only single-agent systems can be analysed in RTL∗. The setting of [9] is also different from the one considered in this paper, in that the actions not only consume but also produce resources. As a result, the model-checking problem for RTL∗ is quite complex, and only partial solutions (e.g. for RTL rather than RTL∗where actions only consume resources) are presented in [9]. No axiomatisation of RTL∗is given.
This paper is a revised and extended version of [4]. The main differences with respect to [4] are the decidability result forRBCL, the model-checking algorithm and proofs of all theorems. In [3] we introduced a logic CLRG for verifying properties of Coalitional Resource Games (with single step strategies) and gave a model-checking algorithm for CLRG, which is essentially a special case of the model-checking algorithm given in this paper.
The work presented in this paper is motivated by our research on epistemic logics for omniscient reasoners such as [6] and on belief ascription to non-omniscient reasoners such as [1, 5], which encouraged us to consider general is-sues of representing resources in logic. However the emphasis and the formal setting of those papers is very different to that considered here. In [6, 5] we con-sider a syntactic temporal epistemic logic based on CTL which contains an explicit counter modalitycp=n
commu-nication actions in the past. The reasoners are assumed to have bounded memory and require time to perform inference steps, but the time and memory resources do not have corresponding counters in the language (time bounds are modelled using temporal operators and memory bounds have a corresponding axiom which says that the agent cannot have more thanm different beliefs). In [1] we pre-sented a dynamic logic for describing the observation-inference-action cycle of a non-omniscient agent; resources are not considered, and the emphasis is on correct belief ascription to the agent at different points in the cycle. The present work does not extend and is not technically related to our work in epistemic logic, apart from the latter providing a motivation for introducing resources explicitly in the logic.
The remainder of this paper is organised as follows. In the next section, we introduce a simple formalism based on Coalition Logic [14] extended with resource bounds,RBCL1, which describes single-step strategies. We then motivate multi-step strategies in section 3 and introduce a more complex logic,RBCL, which can express multi-step strategies (similarly to the Extended Coalition Logic of [13]). We give a sound and complete axiomatisation of RBCL in section 4 and show that the satisfiability problem forRBCL is decidable in section 5. In section 6 we present a model-checking algorithm forRBCL. In section 7 we conclude and outline directions for future work.
2
Formalising single step strategies
We assume a set of agentsA={1, . . . , n}and a set of resourcesR={1, . . . , r}. Agents can perform actions from a setΣ = ∪i∈AΣi, where Σi is the set of
ac-tions that can be performed by agent i. Each action a ∈ Σ has an associated costRes(a), which is a vector of costs (assumed to be natural numbers) for each resource in R. A joint action executed by a coalition C ⊆ A is a tuple of ac-tionsaC = (a1, . . . , ak) (for simplicity, we assume, unless otherwise stated, that
C = {1, . . . , k}for somek ≤ n). For the moment, we stipulate that the cost of a joint actionaC is the vector sum of costs of actions inaC (we generalise the
way costs for different resources are combined in section 3). We compare vectors of resources using pointwise vector comparison≤, e.g., forb = (b1, . . . , br)and
d= (d1, . . . , dr),b≤diff for eachj≤r,bj ≤dj.
The language ofRBCL1 is defined relative to the setsA andR and a set of
propositional variablesP rop. Formulas ofRBCL1are defined as follows:
p| ¬ϕ|ϕ∧ψ|[Cb]ϕ
where p ∈ P rop, C ⊆ A, and b ∈ Nr. The intuitive meaning of [Cb]ϕ for
in other words, the agents inC have a strategy costing at mostb which enables them to achieve aϕ-state no matter what the agentsC¯ =A\C do. The modality corresponding to the empty coalition is a special case.[∅b]ϕmeans that if the grand
coalitionAexecutes any joint action which together costs at mostb, then the system will end up in aϕstate; that is,ϕis unavoidable ifAacts within resource bound b. We have chosen this ‘non-standard’ treatment of the empty coalition modality because it is suggested by the duality of Coalition Logic,¬[∅]ϕ↔[A]¬ϕ(we have
¬[∅b]ϕ↔ [Ab]¬ϕ). We do, however, lose other properties, such as, for example,
monotonicity involving∅:[∅b]ϕ→[Cb]ϕ. An alternative would be to treat∅as a
normal coalition. However, in this case since the cost of an empty set of actions is always 0, we would have[∅b]ϕ↔[∅d]ϕfor anybandd, meaning simply thatϕis
inevitable in the next state (and we would not have the duality property).
We define models ofRBCL1 as transition systems, where in each state agents execute actions in parallel to determine the next state. These are essentially the same as the models for coalition logic with the addition of costs of actions. First we defineresource-bounded action frameswhich underlie the models:
Definition 1. A resource-bounded action (RBA) frame F is a tuple (A, R,Σ =
∪i∈AΣi, S, T, o, Res)where:
Ais a non-empty set of agents,
Ris a non-empty set of resources,
Σis the set of actions agents can perform,
Sis a non-empty set of states,
T :S×A → ℘(Σi)assigns to each state the set of actions available to agenti
in this state; this set is always non-empty as it contains an actionnoopwith Res(noop) = ¯0 = (0, . . . ,0),
ois the outcome function which takes a statesand a joint actionaAand returns
the state resulting from the execution ofaAby the agents ins1
Res: Σ→Nris the resource requirement function.
In the case of joint actions, we generalise the function T as follows: a joint actionaC ∈ T(s, C) iffai ∈ T(s, i)for alli ∈ C. ByRes(aC) we denote the
vector sum ofRes(ai)fori∈C.
1
In order not to impose too many restrictions on the models, we do not require that
o(s,(noop, . . . , noop)) = s. If this requirement is added, we need an extra axiom schema
φ↔[A¯0]φ
Definition 2. A single-step resource-bounded action (RBA) model M is a pair
(F, V)whereFis an RBA frame andV :P rop→℘(S)is an assignment function. The truth definition for single-step RBA models is as follows:
• M, s|=piffs∈V(p)
• M, s|=¬ϕiffM, s6|=ϕ
• M, s|=ϕ∧ψiffM, s|=ϕandM, s|=ψ
• M, s|= [Cb]ϕforC 6=∅iff there isa
C ∈T(s, C)withRes(aC) ≤bsuch
that for every joint actionaC¯ ∈T(s,C¯)by the agents not inC, the outcome
of the resulting tuple of actions executed inssatisfiesϕ:M, o(s,(aC, aC¯))|=
ϕ
• M, s|= [∅b]ϕiff the outcome of any joint actiona
A∈T(s, A)withRes(aA)≤
bexecuted inssatisfiesϕ:M, o(s, aA)|=ϕ.
The notions of satisfiability and validity are standard. Let us call the set of all formulas valid in single-step RBA modelsRBCL1 (where1refers to considering only one-step strategies, as in Coalition Logic).
Theorem 1. RBCL1 is completely axiomatised by the following set of axiom schemas and inference rules:
A0 All propositional tautologies
A1 [Cb]>
A2 ¬[Cb]⊥
A3 ¬[∅b]ϕ↔[Ab]¬ϕ
A4 [Cb](ϕ∧ψ)→[Cb]ϕ
A5 [Cb]ϕ→[Cd]ϕwhered≥bifC 6=∅ord≤bifC=∅
A6a [Cb]ϕ∧[Dd]ψ→[(C∪D)b+d](ϕ∧ψ)whereCandDare both disjoint and
non-empty
A6b [∅b]ϕ∧[Cb]ψ→[Cb](ϕ∧ψ)whereCis either∅orA
MP `ϕ, `ϕ→ψ⇒ `ψ
The notions of derivability and consistency are standard. Note that if we erase the resource superscript in the axiomatisation above, we get the complete axioma-tisation of Coalition Logic as given in [14], and a trivial formula resulting from A5. The rule of monotonicity (RM) is derivable as in Coalition Logic, that is, if
`ϕ→ψ, then`[Cb]ϕ→[Cb]ψ.
We omit the completeness proof here as it is a special case of the completeness proof ofRBCLgiven below.
2.1 Example
As an illustration, we show how to express some properties of coalitional resource games from [18] inRBCL1.
A coalitional resource game (CRG)Γis defined as a tuple(A,G,R,G1,. . .,
Gn,en,req)where
• A={1, . . . , n}is a set of agents,
• G={g1, . . . , gm}is a set of goals,
• R={r1, . . . , rt}is a set of resources,
• Gi ⊆Gis the set of goals for agenti,
• en:A×R →Nis the resource endowment function (how many units of a given resource is allocated to an agent),
• req:G×R →Nis the resource requirement function (how many units of a particular resource is required to achieve a goal). It is assumed that each goal requires a non-zero amount of at least one resource.
In CRGs, the endowment of a coalition is equal to the sum of the endowments of its members:en(C, r) = Σi∈Cen(i, r).
As an example, we give a simple CRG from [18], whereA ={1,2,3};G =
{g1, g2};R = {r1, r2};G1 ={g1},G2 ={g2},G3 ={g1, g2};en(1, r1) = 2,
en(1, r2) = 0, en(2, r1) = 0, en(2, r2) = 1, en(3, r1) = 1, en(3, r2) = 2;
req(g1, r1) = 3, req(g1, r2) = 2, req(g2, r1) = 2, and req(g2, r2) = 1. In RBCL1, we can state properties such as the coalition of agents 1 and 3 can achieve g1 under the resource bound corresponding to the sum of their endowments as
given in the example: [1,3h3,2i]g1. More generally, a decision problem which is
calledcoalitionCis successful under resource boundbin [18] can be expressed as
[Cb]^
i∈C
_
g∈Gi
3
Formalising multi-step strategies and arbitrary resource
combinators
In this section, we generalise the logic described above in two ways. First, we con-sider multi-step strategies, as in Extended Coalition Logic with the[C∗]operator [13], or in ATL. The reason for this is that we are interested in the resource require-ments of strategies which involve multiple steps. For example, suppose a coalition Ccan enforceϕin three steps:[Cb1][Cb2][Cb3]ϕ. We can deduce from this that the agents have a strategy to achieveϕwhich costs at mostb1+b2+b3. However
ex-pressing the fact in this way is rather clumsy. Even worse, to say that ‘Chas some strategy which achievesϕin three steps which costs at mostb’ inRBCL1, we have
to use a disjunction over all possible vectors of natural numbersb1, b2, b3 which
sum up tob: ∨b1+b2+b3=b[Cb1][Cb2][Cb3]ϕ. We therefore change the truth defini-tion of[Cb]to allow us to directly express the existence of a multi-step strategy with costb.
The second generalisation involves the way in which we calculate the resource requirements of complex actions. We argue that not all resource costs should be combined using simple addition. For example, if one of the resources is time and the agents execute their actions concurrently, then, if each individual action costs one unit of time, the parallel combination of those actions also costs one unit of time. If one of the resources is memory, one can argue that if actiona1 requiresn
units of memory and actiona2requiresmunits of memory, then executing actions
a1anda2sequentially requiresmax(n, m)units of memory. For generality, we
in-troduce two cost combinators to express how resource requirements are combined in parallel and in sequence. If two actionsa1 and a2 are performed in parallel,
then the cost of executing them isRes(a1)⊕Res(a2)and the cost of executing
them sequentially isRes(a1)⊗Res(a2), where⊕and⊗may besumfor some
resources, andmaxor some other combinator for others.
In the rest of the paper, we assume that the set of resourcesRalways includes time, that every action costs exactly one unit of time, and that the time cost is the last component of every cost vector. The cost of thenoopaction is redefined as (0, . . . ,0,1). We denote byt(b)the time component of cost vectorb. In particular, t(Res(a)) = 1for anya∈Σ. We realise that this is a significant restriction on the logic, but we rely on it in an essential way in many of the proofs of the technical results (intuitively, it enables us to do induction on resource bounds).
In accordance with the intuitions above,t(b1⊗b2) =t(b1) +t(b2)andt(b1⊕
b2) = max(t(b1), t(b2)). In the language, only operators[Cb]witht(b) ≥ 1are
3.1 Strategies and multi-step RBA models
Given an RBA frameF = (A, R,Σ, S, T, o, Res), astrategyfor an agenti ∈ A is a functionfi :S+ → Σi from finite non-empty sequences of states to actions,
such thatfi(λs) =a∈T(s, i), whereλsis a sequence of states ending in states.
Intuitively,fisays what action agentishould perform in statesgiven the previous
history of the system. A strategy for a coalitionC is a setFC = {f1, . . . , fk}of
strategies for each agent.
For a sequenceλ=s0s1. . .∈Sω, we denoteλ[i] =siandλ[i, j] =si. . . sj.
The set of possible computations generated by a strategy FC from a state s0,
out(s0, FC), is
{λ|λ[0] =s0 ∧ ∀j≥0 :λ[j+ 1]∈o∗(λ[j],(fi(λ[0, j]))i∈C)}
whereo∗(s, aC) = {o(s,(aC, aC¯))| aC¯ ∈T(s,C¯)}. Now we define the cost of
a multi-step strategy. Letλ∈ out(s0, FC). The cost ofFC over a prefixλ[0, m]
wherem >0is defined inductively as follows:
cost(λ[0,1], FC) = ⊕i∈CRes(fi(λ[0])), where Res(fi(λ[0]))is the cost of the
action of agentiinλ[0], and⊕i∈C is the operator for combining the costs of
actions executed in parallel by the agents inC;
cost(λ[0, m], FC) =cost(λ[0, m−1], FC)⊗(⊕i∈CRes(fi(λ[0, m−1])))for
m >1; this is the cost of the previousm−1steps in the strategy combined sequentially with the cost of themth step.
Definition 3. A multi-step resource-bounded action model M is a pair (F, V)
whereF is an RBA frame, andV :P rop→ ℘(S)is an assignment function, and the truth definition for the[Cb]modality is
• M, s |= [Cb]ϕforC 6= ∅iff there is a strategyFC such that for all λ ∈
out(s, FC), there existsm >0such thatcost(λ[0, m], FC)≤bandM, λ[m]|=
ϕ,
• M, s |= [∅b]ϕiff for all strategies F
A, computations λ ∈ out(s, FA), and
m >0such thatcost(λ[0, m], FA)≤b,M, λ[m]|=ϕ.
Note that under this definition, the meaning of [Cb]ϕ(for non-emptyC) be-comes as follows:Chas a multi-step strategy to bring aboutC, and the cost of this strategy is less thanb. The meaning of[∅b]ϕis that the outcome ofanystrategy of
the grand coalitionAwhich costs less thanb, satisfiesϕ.
The set of all formulas valid in multi-step RBA models will be denoted by
3.2 Example
As an illustration, we show how we can express properties of coalitions of resource-bounded reasoners from [2].
In [2], a temporal epistemic logic for resource-bounded reasoners was pre-sented. The states in the models of the logic correspond to tuples of local states of the agents - intuitively the sets of formulas the agents believe or the contents of their memories. Belief operatorsBi for each agentiare interpreted syntactically,
that isBiφif and only if the formulaφ is in agent i’s memory. Transitions
be-tween states correspond to each agent performing, in parallel, one of the following actions: applying a rule of inference (resolution) to two formulas in its memory, ‘reading’ a formula from the agent’s knowledge base into the agent’s memory, or ‘copying’ a formula from another agent’s memory (the latter is a very simple model of communication). The resources of interest are: time (the number of steps the system performed), memory (the maximal number of formulas that must be held simultaneously in the agent’s local state) and communication (the number of ‘copy’ actions).
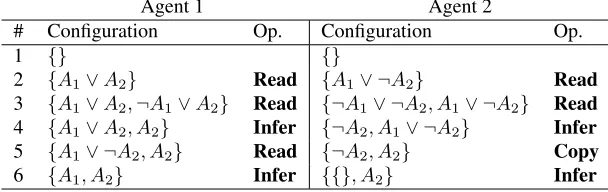
For example, the derivation below can be modelled as a transition system con-sisting of two agents, 1 and 2, where the agents’ knowledge bases contains all formulas of the form∼ A1∨ ∼ A2 (where ∼ Ai is either ¬Ai or Ai), and in
the initial state the memory of both agents is empty. The first transition consists of agent 1 executing the actionRead(A1∨A2)and agent 2 executing the action
Read(A1∨ ¬A2). This transition leads to a state where agent 1’s memory contains (A1∨A2)and agent 2’s memory contains(A1∨ ¬A2), etc.:
Agent 1 Agent 2
# Configuration Op. Configuration Op.
1 {} {}
2 {A1∨A2} Read {A1∨ ¬A2} Read
3 {A1∨A2,¬A1∨A2} Read {¬A1∨ ¬A2, A1∨ ¬A2} Read
4 {A1∨A2, A2} Infer {¬A2, A1∨ ¬A2} Infer
5 {A1∨ ¬A2, A2} Read {¬A2, A2} Copy
[image:9.612.152.456.463.559.2]6 {A1, A2} Infer {{}, A2} Infer
Figure 1: Example derivation using resolution with two agents
The logic defined in [2] did not have any way of expressing coalitional abilities of agents. However inRBCLwe can express that, for example, reasoners 1 and 2 can derive an empty clause within resource bounds 4 for memory, 1 for commu-nication, and 5 for time:[{1,2}(4,1,5)]B
2⊥(whereB2⊥means that⊥is in agent
3.3 Effectivity structures
To prove completeness ofRBCLit is easier to work with an alternative semantics, given not in terms of multi-step RBA models, but in terms of effectivity structures. These are closely related to RBA models, and we will show that effectivity struc-tures satisfying some natural properties give rise to an alternative semantics for
RBCL.
Let ℘(A)B = {Cb | C ⊆ A, b ∈
Nr, t(b) ≥ 1}. Intuitively, this is the set of all possible coalitions with all possible resource allocations. Aneffectivity structure (for a set of statesS and a set of agents A) is a function E : S →
(℘(A)B →℘(℘(S)))which describes, for each state inS, which properties of the
world (corresponding to subsets ofS) a coalition C can enforce under resource boundb.
Given an RBA frame F,the effectivity structure corresponding toF is defined as follows:
• for anyC6=∅andX ⊆S,X∈E(s)(Cb)iff there exists a strategyFCsuch
that for allλ∈out(s, FC), there existsm >0such thatcost(λ[0, m], FC)≤
bandλ[m]∈X;
• X ∈E(s)(∅b)iff for all strategiesF
A, sequences of statesλ∈out(s, FA),
andm >0such thatcost(λ[0, m], FA)≤b, we haveλ[m]∈X.
In other words,X ∈ E(s)(Cb), whereC is not the empty coalition, means that the coalitionChas a strategy to bring aboutXwithin the boundb.X ∈E(s)(∅b)
means that all strategies for the grand coalition which cost lessbalways result in a state inX, i.e.,Xis inevitable.
3.4 Example
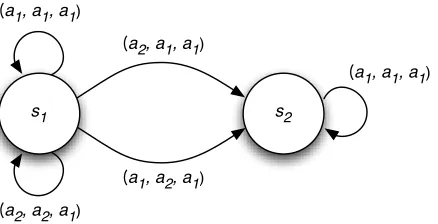
In this section, we illustrate how effectivity structures are connected to action frames. The same example will be used in section 3.6 to show how an effectiv-ity structure satisfying certain conditions gives rise to an action frame. Consider the following RBA frame F = (A, R,Σ, S, T, o, Res), where the set of agents A = {1,2,3}, Rconsists of two resources (the second of which is time), the set of actionsΣ ={a1, a2}wherea1 is thenoopaction,S = {s1, s2},T andoare
shown in Figure 2 and resource requirements of actions areRes(a1) = (0,1)and
Res(a2) = (1,1):
Intuitively, ins1, if agents1and2 perform the same action, then the system
stays ins1, and if they perform different actions, the system will move to states2.
(a2, a1, a1)
s2
(a1, a1, a1)
(a1, a2, a1)
s1 (a1, a1, a1)
[image:11.612.202.421.130.242.2](a2, a2, a1)
Figure 2: Example action frameF
resource bound):
E(s1)(∅(0,1)) = {{s1}, S}
E(s1)(∅(1,1)) =E(s1)(∅b) = {S}
E(s1)({1}(0,1)) =E(s1)({1}(1,1)) =E(s1)({1}b) = {S}
E(s1)({2}(0,1)) =E(s1)({2}(1,1)) =E(s1)({2}b) = {S}
E(s1)({3}(0,1)) =E(s1)({3}(1,1)) =E(s1)({3}b) = {S}
E(s1)({1,2}(0,1)) = {{s1}, S}
E(s1)({1,2}(1,1)) =E(s1)({1,2}b) = {{s1},{s2}, S}
E(s1)({1,3}(0,1)) =E(s1)({1,3}(1,1)) =E(s1)({1,3}b) = {S}
E(s1)({2,3}(0,1)) =E(s1)({2,3}(1,1)) =E(s1)({2,3}b) = {S}
E(s1)({1,2,3}(0,1)) = {{s1}, S}
E(s1)({1,2,3}(1,1)) =E(s1)({1,2,3}b) = {{s1},{s2}, S}
E(s2)(Cd) = {{s2}, S}
3.5 Characterising effectivity in RBA frames
Every RBA frame gives rise to an effectivity structure, but the reverse does not hold. In this section, we characterise properties which an effectivity structure should satisfy to be an effectivity structure corresponding to an RBA frame. Fol-lowing Pauly in [14], who introduced the term ‘playable’ for effectivity struc-tures in Coalition Logic, we call such effectivity strucstruc-tures RB-playable, where RB stands for resource-bounded.
• An effectivity structureEisoutcome monotoniciff
X∈E(s)(Cb)⇒X0 ∈E(s)(Cb)for allX0 ⊇X
• An effectivity structureEiscoalition monotoniciff
X∈E(s)(Cb)⇒X ∈E(s)(Db)
whereC6=∅andC ⊆D; and
X∈E(s)(∅b)⇒X∈E(s)(Ab)
• An effectivity structureEisA-maximaliff
X /∈E(s)(∅b)⇒X∈E(s)(Ab)
• An effectivity structureEisA-minimaliff
X∈E(s)(Ab)∧Y /∈E(s)(Ab)⇒X\Y ∈E(s)(Ab)
Note thatA-minimalityis not listed in [14], but its analogue is derivable.
• An effectivity structureEisregulariff for all coalitionsCwhich are neither empty nor equal toA
X∈E(s)(Cb)⇒X /∈E(s)(Cb
0
)for allt(b) =t(b0) = 1
In the case where the time component is greater than one, we also have a similar property to regularity but only forA. An effectivity structureE is
A-regulariffX ∈E(s)(Ab)⇒X /∈E(s)(∅b).
• An effectivity structureE is super-additiveiff for all b anddwitht(b) =
t(d) = 1, andC∩D=∅:
– IfC6=∅andD6=∅,X1 ∈E(s)(Cb)andX2∈E(s)(Dd)⇒
X1∩X2∈E(s)((C∪D)b⊕d)
– IfC =∅andD =∅orA,X1 ∈E(s)(∅d)andX2 ∈ E(s)(Dd)then
We have two different cases in the definition of super-additivity because in
∅b,bis not the resource bound for the coalition it annotates but for its
com-plement. Therefore, it should not be possible to sum up the bounds as in the case when both coalitionsC andDare non-empty. Notice that super-additivity requires the time component of both resource bounds to be equal to1. If time components are not equal, this property might not be true. Con-sider for example the case when agent 1 can bring aboutpby executing one action, and agent 2 can bring about¬pby executing a sequence of two ac-tions: V(p) ∈ E(s)({1}b1), wheret(b
1) = 1, andV(p) ∈ E(s)({2}b2),
wheret(b2) = 2. It should not be possible to conclude that together, agents
1 and 2 can bring aboutp ∧ ¬p by expending b1 ⊕b2 resources, or that
∅ ∈E(s)({1,2}b1⊕b2). Intuitively, if agent 2 can enforce¬pafter two steps, then it must be that agent 1 cannot keep enforcingpfor longer than 1 step. However, from the super-additivity property fort(b) = t(d) = 1, we can derive the same property fort(b) =t(d)≥n.
We also have the following more general property for the case when one of the coalitions is empty:
• An effectivity structure E isgeneral super-additive iff it is super-additive and
X1 ∈E(s)(∅b)andX2 ∈E(s)(Cb)⇒X1∩X2 ∈E(s)(Cb)
whereCis either empty or the grand coalition.
We also have properties corresponding to sequential composition of strategies:
• An effectivity structureEissuper-transitiveiff for allC6=∅
{s0 ∈S |X∈E(s0)(Cb2)} ∈E(s)(Cb1)⇒X ∈E(s)(Cb1⊗b2)
(if a set of states whereX is obtainable underb2 can be enforced underb1,
thenXcan be enforced by the combined strategy underb1⊗b2).
• An effectivity structureEistransitiveiff for anybwitht(b)>1andC 6=∅: X ∈ E(s)(Cb) ⇒ ∃b0 < b : X ∈ E(s)(Cb0) (X can be achieved under a tighter boundb0) or∃b1⊗b2 =b:{s0 ∈S |X∈E(s0)(Cb2)} ∈E(s)(Cb1)
(Xcan be achieved by combining two strategies costingb1 andb2such that
b1⊗b2=b).
• An effectivity structureEisbound-monotoniciff
X∈E(s)(Cb)⇒X∈E(s)(Cd)for alld≥bifC 6=∅ord≤bifC=∅.
Bound-monotonicity is a very natural property which states that if a non-empty coalition can achieve something under bound b, then it can achieve it with more resources. ForC =∅, this property means that if an outcome cannot be avoided when the grand coalition is restricted to strategies which cost at most b, then it cannot be avoided ifAuses fewer resources (hence has fewer strategies available). It is easy to prove that the properties above are true for any effectivity struc-ture obtained from a RBA frame. Conversely, RB-playable effectivity strucstruc-tures defined below are effectivity structures of an RBA frame.
Definition 4. An effectivity structure E : S → (℘(A)B → ℘(℘(S))) is RB-playable iff, for everys∈S,Ehas the following properties:
1. For allCb∈℘(A)B,S ∈E(s)(Cb)
2. For allCb∈℘(A)B,∅∈/E(s)(Cb)
3. Outcome-monotonicity
4. A-maximality
5. A-regularity
6. Super-additivity
7. Super-transitivity
8. Transitivity
9. Bound-monotonicity
It can be shown that RB-playability implies the other properties listed above.
Lemma 1. LetE be a RB-playable effectivity structure, thenEhas the following properties:
1. Coalition monotonicity
2. A-minimality
3. Regularity
In the following, we provide the proof of the above lemma. First general super-additivity is proved by induction on resource bounds using super-super-additivity. The proofs of the other properties are based on general super-additivity.
Proof. By super-transitivity, we have that, for anybandb1⊗b2=b
{s0 |X∈E(s0)(Ab2)} ∈E(s)(Ab1)⇒X∈E(s)(Ab1⊗b2)
Hence,
X /∈E(s)(Ab1⊗b2)⇒ {s0|X ∈E(s0)(Ab2)}∈/E(s)(Ab1)
ByA-regularity andA-maximality, we haveX∈E(s)(∅b1⊗b2)⇒X /∈E(s)(Ab1⊗b2) and{s0 |X∈E(s0)(Ab2)}∈/ E(s)(Ab1)⇒ {s0 |X ∈E(s0)(∅b2)} ∈E(s)(∅b1), respectively. Therefore,
X ∈E(s)(∅b1⊗b2)⇒ {s0|X ∈E(s0)(∅b2)} ∈E(s)(∅b1) (1)
We now prove general super-additivity by induction on time component ofb. The base case follows directly from super-additivity. Let X ∈ E(s)(∅b) where
time component ofb is greater than 1. Assume thatY ∈ E(s)(Cb) whereC is either∅ orA. IfY ∈ E(s)(Cb0) for someb0 < b, then bound-monotonicity for the empty coalition and the induction hypothesis imply thatX∩Y ∈E(s)(Cb0). Hence, bound-monotonicity impliesX∩Y ∈E(s)(Cb). IfY /∈E(s)(Cb0)for all suchb0, we have that there existb1andb2such thatb1⊗b2 =band
{s0|Y ∈E(s0)(Cb2)} ∈E(s)(Cb1)
which follows from transitivity whenC=Aor from (1) with arbitraryb1⊕b2=b
when C = ∅. Note that we also have {s0 | X ∈ E(s0)(∅b2)} ∈ E(s)(∅b1). Applying the induction hypothesis twice together with outcome-monotonicity, we have the following result:
{s0 |X∩Y ∈E(s0)(Cb2)} ∈E(s)(Cb1)
Therefore, super-transitivity implies thatX∩Y ∈E(s)(Cb).
1. Assume that X ∈ E(s)(∅b). By RB-playability, we haveS ∈ E(s)(Ab).
Applying general super-additivity, we obtainX∈E(s)(Ab).
In the base case, when time component ofbis equal to1, letC0 =D\C. We haveS∈E(s)(C0(0,...,0,1)), thus super-additivity implies thatX =X∩S ∈
E(s)(Db).
Let us assume that time component ofbis greater than1. IfX∈E(s)(Cb0) for some b0 < b, then it is obvious by the induction hypothesis that X ∈
E(s)(Db0). Hence, bound-monotonicity implies that X ∈ E(s)(Db). If X /∈E(s)(Cb0)for any suchb0, then we have by transitivity that there exists b1⊗b2=bsuch that
{s0 |X∈E(s0)(Cb2)} ∈E(s)(Cb1)
By the induction hypothesis, we have
{s0|X ∈E(s0)(Cb2)} ∈E(s)(Db1)
and
{s0 |X∈E(s0)(Cb2)} ⊆ {s0 |X ∈E(s0)(Db2)}
Thus, outcome-monotonicity implies that
{s0 |X∈E(s0)(Db2)} ∈E(s)(Db1)
Therefore, we have by super-transitivity thatX ∈E(s)(Db).
2. Assume thatX ∈E(s)(Ab)andY /∈E(s)(Ab). ByA-maximality, we have
Y ∈ E(s)(∅b). Therefore, general super-additivity implies that X∩Y ∈
E(s)(Ab).
3. Assume that∅ 6=C ⊂AandX ∈E(s)(Cb)where the time component of bis equal to1. Furthermore, assume by contradiction thatX ∈E(s)(Cb
0 ), where the time component ofb0is also equal to1. Applying super-additivity, we haveX ∩X ∈ E(s)(Ab⊕b0) which contradicts the fact thatE is RB-playable. Therefore,Eis regular.
Theorem 2. An effectivity structure is RB-playable iff it is the effectivity structure of some RBA frame.
LetE be an RB-playable effectivity structure. The construction of the RBA frame is similar to that in Coalition Logic extended with costs for actions. First, we define the set of possible actions for each agent at each states ∈S with their associated costsRes. Then the construction is completed by defining the outcome functiono.
In order to make the proof easier to follow, we first provide an informal sketch of the argument, which follows closely the argument in [14]. The main task in defining the RBA frame is to define the actions available to each agent at a particu-lar state. We construct these actions in a way that makes it easier to define costs of actions and the outcome function later. Each action for an agent is a triple(g, t, h) where:
• gis a function which defines the preferred set of outcomes for each coalition in which the agent participates and is willing to contribute a certain amount of resources (then, the cost of this action is this amount of resources). Given the actions of all agents, the componentg of those actions will define the coalitions in which the agents participate, hence also the preferred set of outcomes for each agent.
• tis a natural number which is used to determine which agent has the power to decide the outcome.
• when we know which agent has the power to decide the outcome and its preferred set of outcomes, h is a function which picks a single outcome among those in the preferred set.
In the following, we present in detail how actions and outcomes of actions are defined. We present a worked example in section 3.6.
For everyi ∈ A and boundbsuch thatt(b) = 1, we defineCb
i = {Cd | i ∈
C∧t(d) = 1∧d≥b}which is the set of all coalitions in whichimay participate and contributebamount of resources. Note that for all actionst(b)is always1.
For everys∈S, we define
Γ(s, i) ={g(bs,i):Cib→℘(S)|gb(s,i)(Cd)∈E(s)(Cd)}
Γ(s, i)is the set of option functions for an agentiat states. Each option function in Γ(s, i)is a mappinggb(s,i)in whichbis a resource bound such thatt(b) = 1. g(bs,i) determines the outcome when agentiagrees to participate in a coalition. How an agent agrees to participate in a coalition will be specified later when we define the outcome function.
so. We then define the set of available actions for an agentiat a statesas follows:
T(s, i) = Γ(s, i)×N×H
Each action is a triple(g(bs,i), t, h)consisting of an option functiongb(s,i), an in-dext(a natural number) and a choice functionh. Informally, option functions de-termine how the agents group together to form coalitions and then which outcome options they will choose. The index determines which agent has the power to de-cide the outcome based on its associatedhfunction. We setRes((gb
(s,i), t, h)) =b.
Note that for any action, we havet(Res((g(bs,i), t, h))) = 1.
LetΣi =Ss∈ST(s, i). We now define the outcome of a joint actionσ ∈ ΣA
at a states. Assume thatσ ={(gbi
(s,i), ti, hi)|i = 1, . . . , n}wheret(bi) = 1for
alli ∈ A. For any coalitionC ⊆ A, letbC = ⊕i∈Cbi andg = (g(bs,ii ))i∈A. We
denote byP(g, C)the coarsest partitionhC1, . . . , CmiofCsuch that:
∀l≤m∀i, j∈Cl:g(bs,ii )(CbC) =g bj (s,j)(C
bC)
We define how coalitions are formed based ongas follows:
P0(g) = hAi
P1(g) = hP(g, A)i=hC1,1, . . . , C1,k1i P2(g) = hP(g, C1,1), . . . , P(g, C1,k1)i
=hC2,1, . . . , C2,k2i ..
.
Pη(g) = hCη,1, . . . , Cη,kηi
As A is finite, the above computation reaches some η such that Pη(g) =
Pη+1(g). LetP(g) =Pη(g)be the partition which shows how agents are grouped
into coalitions.
For technical convenience, letEo(s)(Ab)denote the collection of minimal sets inE(s)(Ab). ByA-minimality, it is easy to show thatEo(s)(Ab)contains only sin-gletons. In other words, by outcome-monotonicity, we haveX∈E(s)(Ab)if and only ifX ⊇Xofor someXo∈Eo(s)(Ab). By regularity, we haveX ∈E(s)(∅b)
if and only ifX⊇ ∪Eo(s)(Ab)where∪Eo(s)(Ab) =∪Xo∈Eo(s)(Ab)Xo.
Assume thatP(g) =hC1, . . . , Cmi. For convenience, letg(Cl) =g(bs,ii )(ClbCl)
for somei∈Clwherel≤m.
We define G(g) = T
l≤m
g(Cl)∩(∪Eo(s)(AbA)). By super-additivity and the
fact that ∅ ∈/ E(s)(AbA) asE is RB-playable, it is straightforward to show that
Lett0 = (Pi∈Ati mod n) + 1. The outcome function is defined as follows:
o(s, σ) = ht0(G(g)). LetEF be the effectivity structure of the frame constructed above. We claim thatE =EF.
Firstly, we show the left-to-right inclusion by induction on bounds. In the base case, assumeX ∈ E(s)(Cb) wheret(b) = 1. Choose the actions for agents in C={1, . . . , k}as follows,
a1 = (gb1, t1, h1)
a2 = (g02, t2, h2)
.. .
ak = (g0k, tk, hk)
where g1b(Dd) = gi0(Dd) = X for all i = 2, . . . , k, D ⊇ C, d ≥ b. Notice that the choices ofgb1,g20,. . ., g0k must exist because of bound-monotonicity and coalition-monotonicity. Moreover, the choices ofti andhi, wherei = 1, . . . , k,
are arbitrary. LetσC ={(g1b, t1, h1),(g20, t2, h2), . . . ,(gk0, tk, hk)}.
LetσC be an arbitrary joint action forC. Letσ = (σC, σC)and letgbe the
set of the option functions fromσ. By the choice ofσC,Cmust be a subset of a
partitionClinP(g). Then, we have
o(s, σ) =ht0(G(g))∈G(g)⊆g(Cl) =X
Hence,X∈EF(s)(Cb).
For the induction step, letX ∈E(s)(Cb)wheret(b)>1. IfX ∈E(s)(Cb0) for someb0 < b, by the induction hypothesis, we haveX ∈ EF(s)(Cb
0
). There-fore, bound-monotonicity implies thatX∈EF(s)(Cb).
IfX /∈E(s)(Cb0)for anyb0 < b, by transitivity there areb1⊗b2=bsuch that
{s0|X ∈E(s0)(Cb2)} ∈E(s)(Cb1)
By the induction hypothesis, we have
{s0 |X∈E(s0)(Cb2)} ∈E
F(s)(Cb1)
and
{s0|X ∈E(s0)(Cb2)} ⊆ {s0|X ∈E
F(s0)(Cb2)}
By outcome-monotonicity, we have
{s0 |X∈EF(s0)(Cb2)} ∈EF(s)(Cb1)
For the other direction, we consider two cases in which C = A and C ⊂
A. Assume that X /∈ E(s)(Ab). By A-maximality, we obtainX ∈ E(s)(∅b).
However, the previous proof implies thatX∈EF(s)(∅b). AsEF is RB-playable,
by regularity we haveX /∈EF(s)(Ab).
For the case ofC ⊂ A, the proof is done by induction on bounds. Assume thatX /∈ E(s)(Cb)where t(b) = 1andC ⊂ A, i.e. there isi0 ∈ A\C. Let
σC ={(g(bs,ii ), ti, hi)|i∈C}be a joint action forCsuch thatRes(σC)≤b. We
choose a strategyσC ={(gbi
(s,i), ti, hi)|i∈C}forCsuch that:
• bi= 0for alli > k
• gbi (s,i)(D
d) =Sfor alli∈C,D⊇C,d≥b i
• (P
i∈Ati mod n) + 1 =i0
• hifori6=i0 is arbitrary, we will selecthi0 shortly
As before, letσ = (σC, σC)andgbe the collection of option functions inσ. We
use notationbD =⊕i∈Dbifor anyD⊆A.
By the choice of option functions inσC, it follows thatCis the subset of some partition Cl of P(g). For other partitions, super-additivity shows that G(g) ∈
E(s)(Cl bCl
). By coalition-monotonicity and bound-monotonicity, we have that G(g) ∈ E(s)(Cb). AsX /∈ E(s)(Cb), it follows thatG(g) 6⊆ X by outcome-monotonicity, i.e. there is somes0 ∈G(g)\X. Selecthi0 such thathi0(G(g)) = s0, then
o(s, σ) =hi0(G(g)) =s0 ∈/ X
Hence,X /∈EF(s)(Cb).
In the induction step, assume thatX /∈ E(s)(Cb)where t(b) > 1. Bound-monotonicity shows that for all b0 ≤ b, X /∈ E(s)(Cb0) and super-transitivity implies that for allb1⊗b2 =b,
{s0|X∈E(s0)(Cb2)}∈/E(s)(Cb1)
By the induction hypothesis, we have that for allb0 < b,X /∈EF(s)(Cb
0
)and for allb1⊗b2 =b,
{s0 |X∈E(s0)(Cb2)}∈/E
F(s)(Cb1)
and{s0 | X ∈ E(s0)(Cb2)} = {s0 | X ∈ E
F(s0)(Cb2)}. Then, {s0 | X ∈
3.6 Example
We illustrate the construction of an action frame given in the proof above on the example of the effectivity structure from section 3.4.
Observe that the setΓ(s, i) for eachsandiis infinite, if only because of the infinitely many possible resource bounds. Below is an elementg1(1,1) ofΓ(s1,1)
which will be used in our example:
• g1(1,1)({1,2,3}d) ={s
2}for anyd≥(2,1). This is a valid definition for an
element ofΓ(s1,1)because{s2} ∈E(s1)({1,2,3}(2,1)).
• g1(1,1)({1,2}d) ={s
2}for anyd≥(2,1).
• g1(1,1)(Cd) =Sfor any otherCandd≥(1,1).
Similarly,Γ(s1,2)containsg2(1,1)such that
• g2(1,1)({1,2,3}d) ={s
2}for anyd≥(2,1).
• g2(1,1)({1,2}d) ={s
1}for anyd≥(2,1).
• g2(1,1)(Cd) =Sfor any otherCandd≥(1,1).
andΓ(s1,3)containsg3(0,1)such that
• g3(0,1)({1,2,3}d) ={s
1}for anyd≥(2,1).
• g3(0,1)(Cd) =Sfor any otherCandd≥(1,1).
The setHcontains all possible functionshfrom subsets ofSto elements ofS, with the condition thath(X) ∈ X. We will consider two elements ofH, h({si}) =
h0({si}) = si, h(S) = s1 andh0(S) = s2. The set of actions for each agent i, Γ(s, i)×N×H, is infinite, both becauseΓ(s, i)is infinite and because ofN. We will show how to determine outcomes of joint actions for just one example triple of actions,(g(11,1),1, h)for agent1,(g2(1,1),5, h)for agent2and(g(03 ,1),8, h0)for agent3.
Letg= (g1(1,1), g2(1,1), g3(0,1)), we have the following coarsest partitionP(g, C):
• P(g,{1,2,3}) =h{1,2},{3}i
• P(g,{1,2}) =h{1},{2}i
• P(g,{2,3}) =h{2,3}i
• P(g,{1}) =h{1}i
• P(g,{2}) =h{2}i
• P(g,{3}) =h{3}i
We applyP repeatedly as follows.
P0(g) = {1,2,3}
P1(g) = P(g,{1,2,3}) =h{1,2},{3}i
P2(g) = hP(g,{1,2}), P(g,{3})i=h{1},{2},{3}i
P3(g) = hP(g,{1}), P(g,{2}), P(g,{3})i=h{1},{2},{3}i
Then, we have,
• g({1}) =g1(1,1)({1}(1,1)) =S
• g({2}) =g2(1,1)({2}(0,1)) =S
• g({3}) =g3(0,1)({3}(0,1)) =S
Note that given ourE,∪Eo(s1)({1,2,3}(2,1)) ={s1} ∪ {s2}=S. Then,G(g) =
g({1})∩g({2})∩g({3})∩ ∪Eo(s1)({1,2,3}(1,1)) =S. We havet0 = (1 + 5 + 8) mod 3 + 1 = 3. Then, we choose the choice function from the action of agent3 which ish0. Therefore, the outcome of the joint action which we consider in this example ish0(G(g)) =s2.
4
Axiomatisation of
RBCL
In this section we define models based on RB-playable effectivity structures, and give a complete axiomatisation for the set of validities in those models.
Definition 5. A resource-bounded effectivity model M = (S, E, V) is a triple consisting of a non-empty set of states, a RB-playable effectivity structure and a valuation functionV :P rop → ℘(S). The truth definition for[Cb]modalities is as follows:
Notice that in the above definition, we do not define the truth for[Cb] modal-ities in two separate cases, one for non-empty coalitions C and one for empty coalitions. This is because the two cases are covered by the RB-playable effectiv-ity structureE, - see the correspondence of effectivity structures to RBA frames in Section 3.3 for more details.
For convenience, we also extend the definition of the functionV for a given modelM = (S, E, V)as follows,V(ϕ) ={s∈S|M, s|=ϕ}.
Theorem 3. The sets of formulas valid in multi-step RBA models and in resource-bounded effectivity models are equal.
This follows from the correspondence between RBA frames and RB-playable effectivity structures, and the correspondence between the two truth definitions. Therefore the next result also provides an axiomatisation forRBCL.
Theorem 4. The following set of axiom schemas and inference rules provides a sound and complete axiomatisation of the set of validities over all resource-bounded effectivity models:
A0 All propositional tautologies
A1 [Cb]>
A2 ¬[Cb]⊥
A3 ¬[∅b]ϕ↔[Ab]¬ϕ
A4 [Cb](ϕ∧ψ)→[Cb]ϕ
A5 [Cb]ϕ→[Cd]ϕwhered≥bifC 6=∅ord≤bifC=∅
A6a [Cb]ϕ∧[Dd]ψ→[(C∪D)b⊕d](ϕ∧ψ)whereCandDare both non-empty and disjoint, andt(b) =t(d) = 1
A6b [∅b]ϕ∧[Cb]ψ→[Cb](ϕ∧ψ)whereCis either∅orA
A7 [Cb1][Cb2]ϕ→[Cb1⊗b2]ϕforC6=∅
A8 [Cb]ϕ→W
b0<b[Cb 0
]ϕ∨W
b1⊗b2=b[C
b1][Cb2]ϕfor allC 6=∅
MP `ϕ, `ϕ→ψ⇒ `ψ
Proof. Notice that for axiomA8, whenb = (0, . . . ,0,1), it simply has the form
[Cb]ϕ→ >which is a propositional tautology.
The proof of soundness is straightforward. We prove completeness by con-structing a canonical model. Let us denote by`Λderivability in the axiom system
above. LetSΛbe the set of allΛ-maximally consistent sets. For any formulaϕ, we denoteϕ˜={s∈SΛ |ϕ∈ s}. Then, we define the canonical valuation function VΛ(p) = ˜p.
We define the canonical effectivity structureEΛby induction onbas follows:
• For allb such thatt(b) = 1 andC 6= A, X ∈ EΛ(s)(Cb)iff ∃ϕ˜ ⊆ X : [Cb]ϕ∈s.X ∈EΛ(s)(Ab)iffX /∈EΛ(s)(∅b).
• For allbsuch thatt(b)>1andC6=∅,X∈EΛ(s)(Cb)iffX∈EΛ(s)(Cb0) for someb0 < bor there areb1⊗b2 =bsuch that{s0 |X∈EΛ(s0)(Cb2)} ∈
EΛ(s)(Cb1).X∈EΛ(s)(∅b)iffX /∈EΛ(s)(Ab).
The following property(∗)is crucial for the proof:
(∗) ϕ˜∈EΛ(s)(Cb)iff[Cb]ϕ∈s
We prove it by induction on the bounds. In the base case, assume that ϕ˜ ∈
EΛ(s)(Cb) for some t(b) = 1. For C 6= A, ϕ˜ ∈ EΛ(s)(Cb) iff ∃ψ˜ ⊆ ϕ˜ : [Cb]ψ ∈ s. By`
Λ ψ → ϕandRM, it is implied that[Cb]ϕ ∈ s. In the inverse
direction,[Cb]ϕ∈simplies directly thatϕ˜∈EΛ(s)(Cb)by the definition ofEΛ. IfC = A, we haveϕ˜ ∈ EΛ(s)(Ab)iff¬˜ϕ /∈EΛ(s)(∅b)iff¬[∅b]¬ϕ ∈s(as
just proved) iff[Ab]ϕ∈s(by axiomA3).
For the induction step, assume that ϕ˜ ∈ EΛ(s)(Cb) where t(b) > 1. For C 6= ∅, there are two cases to consider. (1) ϕ˜ ∈ EΛ(s)(Cb0) for some b0 < b. By the induction hypothesis, we have[Cb0]ϕ ∈ s. Then, axiomA5 implies that
[Cb]ϕ∈s. (2) There areb1⊗b2 =bsuch that
{s0 |ϕ˜∈EΛ(s0)(Cb2)} ∈EΛ(s)(Cb1).
Letψ= [Cb2]ϕ, by the induction hypothesis, we haveψ˜={s0|ϕ˜∈EΛ(s0)(Cb2)}, thus,ψ˜∈EΛ(s)(Cb1). Again, the induction hypothesis gives us[Cb1][Cb2]ϕ∈s. Therefore, by axiomA7, we have[Cb]ϕ∈s.
For the inverse direction, assume that[Cb]ϕ ∈ sfor somet(b) > 1. By ax-iomA8, there are two cases to consider. If[Cb0]ϕ ∈ sfor someb0 < b, then the induction hypothesis implies that ϕ˜ ∈ EΛ(s)(Cb0). Hence, by the definition of
this shows
{s0 |ϕ˜∈EΛ(s0)(Cb2)} ∈EΛ(s)(Cb1).
By the definition ofEΛ, we obtainϕ˜∈EΛ(s)(Cb).
IfC = ∅, we haveϕ˜ ∈ EΛ(s)(∅b) iff¬˜ϕ /∈EΛ(s)(Ab)iff¬[Ab]¬ϕ ∈s(as
just proved) iff[∅b]ϕ∈s(by axiomA3).
The proof thatEΛis RB-playable is straightforward given the property(∗), the
definition ofEΛand the axioms ofΛ.
1. As[Cb]> ∈sfor alls∈SΛ, we have by (*) thatSΛ= ˜> ∈EΛ(s)(Cb).
2. Similarly, [Cb]⊥ ∈/ s for all s ∈ SΛ implies by (*) that that ∅ = ˜⊥ ∈/ EΛ(s)(Cb).
3. We prove outcome-monotonicity by induction on bounds. Assume thatX ∈
EΛ(s)(Cb).
• Ift(b) = 1andC 6= A, X ∈ EΛ(s)(Cb) iff there existsϕsuch that ˜
ϕ⊆Xand[Cb]ϕ∈s. Hence, for allX0 ⊇X, we have thatϕ˜⊆X0. This implies by the definition ofEΛthatX0 ∈EΛ(s)(Cb)
• If t(b) = 1, X ∈ EΛ(s)(Ab) iff X /∈ EΛ(s)(∅b). Let X0 ⊇ X,
thenX0 ⊆X. Assume by contradiction thatX0 ∈/ EΛ(s)(Ab). Then,
X0 ∈EΛ(s)(∅b). AsX0 ⊆X, this implies thatX∈EΛ(s)(∅b)which
is a contradiction.
• Ift(b) > 1 andC 6= ∅. If X ∈ EΛ(s)(Cb0) for some b0 < b, the induction hypothesis shows thatX0 ∈ EΛ(s)(Cb0) for all X0 ⊇ X. Then, by the definition of EΛ we haveX0 ∈ EΛ(Cb)(s). Assume X /∈EΛ(s)(Cb0)for allb0 < b. By the definition ofEΛ, there areb1,
b2such thatb1⊗b2=band
{s0|X ∈EΛ(s0)(Cb2)} ∈EΛ(s)(Cb1)
LetX0 ⊇X, by the induction hypothesis we have
{s0 |X∈EΛ(s0)(Cb2)} ⊆ {s0 |X0 ∈EΛ(s0)(Cb2)}
⇒ {s0 |X0∈EΛ(s0)(Cb2)} ∈EΛ(s)(Cb1)
By the definition ofEΛ, we haveX0∈EΛ(s)(Cb).
• If t(b) > 1, X ∈ EΛ(s)(∅b) iff X /∈ EΛ(s)(Ab). Let X0 ⊇ X
and assume by contradiction thatX0 ∈/ EΛ(s)(∅b). This implies that
X0 ∈EΛ(s)(Ab). By the previous proof, we haveX ∈EΛ(s)(Ab)as
4. A-maximality follows directly from the definition ofEΛforAwhent(b) = 1and for∅whent(b)>1.
5. Similarly,A-regularity also follows directly from the definition ofEΛforA whent(b) = 1and for∅whent(b)>1.
6. In order to show super-additivity, we consider the following three cases. Let t(b) =t(d) = 1,C∩D=∅,X∈EΛ(s)(Cb)andY ∈EΛ(s)(Dd).
• If bothC andDare not empty by the definition ofEΛ, we have that there areϕandψsuch thatϕ˜ ⊆ X,ψ˜ ⊆ Y,[Cb]ϕand[Dd]ψ ∈ s. According to axiomA6a, we have[(C∪D)b⊕d](ϕ∧ψ)∈s. Obviously,
˜
ϕ∩ψ˜⊆X∩Y, henceX∩Y ∈EΛ(s)((C∪D)b⊕d).
• IfC=∅,b=dandD=∅, the proof is similar to the one above except that axiomA6bgives us[Dd](ϕ∧ψ)∈s. Hence,X∩Y ∈EΛ(s)(Dd).
• IfC=∅,b=dandD=A, we need to show thatX∩Y ∈EΛ(Ab)(s). Assume to the contrary thatX∩Y /∈EΛ(Ab)(s), thenA-maximality, which has been proved above, implies thatX∩Y ∈EΛ(∅b)(s). Then,
by the previous case of super-additivity, we haveX∩Y ∈EΛ(∅b)(s).
As we already showed outcome-monotonicity,Y ∈ EΛ(∅b)(s).
How-ever, byA-regularity, we have Y /∈ EΛ(Ab)(s)which is a contradic-tion.
7. Super-transitivity follows directly from the definition ofEΛwhent(b)>1.
8. Similarly, transitivity follows directly from the definition ofEΛwhent(b)> 1.
9. Finally, we show that EΛ is indeed bound-monotonic. Let us assume that X∈EΛ(s)(Cb).
• Ift(b) = 1andC 6= A, X ∈ EΛ(s)(Cb) iff there existsϕsuch that ˜
ϕ⊆Xand[Cb]ϕ∈s. By axiomA5, we have that ifC 6=∅, then for anyd≥b,[Cd]ϕ∈s. ForC =∅,[∅d]ϕ∈sfor anyd≤b. Then, by
the definition ofEΛ,X∈EΛ(s)(Cd).
• Ift(b) = 1andC = A, X ∈EΛ(s)(Ab) iffX /∈ EΛ(s)(∅b). Then,
axiomA5implies thatX /∈EΛ(s)(∅d)for anyd≥b. Once again, by
the definition ofEΛ, we haveX∈EΛ(s)(Ad).
• Ift(b) >1andC =∅, X ∈ EΛ(s)(∅b)iffX /∈ EΛ(s)(Ab). By the
proof of the previous case, we haveX /∈ EΛ(s)(Ad)for anyd ≤ b. Hence,X∈EΛ(s)(∅d).
Since we have already shown (*), the following truth lemma is straightforward:
(∗∗) MΛ, s|=ϕiffϕ∈s
As usual, we show (**) by induction on the structure of ϕ. The cases for propositional variables and usual Boolean connectives are trivial and are omitted.
• Ifϕ= [Cb]ψ, then,
MΛ, s|= [Cb]ψ ⇔ ψMΛ ∈EΛ(s)(Cb)
⇔ ψ˜∈EΛ(s)(Cb) by the induction hypothesis
⇔ [Cb]ψ∈s by (*)
From (**), it is obvious that for any consistent formulaϕ, there is a states∈
SΛ such that ϕ ∈ s, henceMΛ, s |= ϕ. In other words, ϕ is satisfiable. We complete the proof of completeness as follows. Let6`Λ ϕ, i.e. ¬ϕis consistent.
Hence,¬ϕis satisfiable. Therefore,ϕis not valid.
5
Satisfiability
In this section we show that the satisfiability problem forRBCLis decidable by providing an algorithm which determines the satisfiability of a given formulaϕ. Similar to Coalition Logic, our algorithm is developed by adopting the approach presented in [16]. In outline, the algorithm tries to guess a valuation satisfying certain conditions for an extended set of subformulas ofϕ. Such a valuation is used to construct a model forϕ, or in other words, assure the satisfiability ofϕ.
Given a formulaϕ, we define a setsub(ϕ)inductively as follows.
• sub(p) ={p}for any propositional variablep
• sub(¬ψ) ={¬ψ} ∪sub(ψ)
• sub(ψ1∨ψ2) ={ψ1∨ψ2} ∪sub(ψ1)∪sub(ψ2)
• sub([Cb]ψ) ={[Cb]ψ} ∪sub(ψ)fort(b) = 1andC 6=A
• sub([Cb]ψ) ={[Cb]ψ} ∪S
b0<bsub([Cb 0
]ψ)∪S
b1⊗b2=bsub([C
b1][Cb2]ψ)
fort(b)>1andC 6=∅
• sub([∅b]ψ) ={[∅b]ψ} ∪sub(¬[Ab]¬ψ)fort(b)>1
It is easy to show thatsub(ϕ)is finite. Then, we define the closurecl(ϕ)of a given formulaϕas follows.
cl(ϕ) = {ψ,¬ψ|ψ∈sub(ϕ)}∪
{[∅b]¬ψ,¬[∅b]¬ψ|[Ab]ψ∈sub(ϕ)}∪ {[Ab]¬ψ,¬[Ab]¬ψ|[∅b]ψ∈sub(ϕ)}
Notice that we identify¬¬ψwithψ. Moreover, we denote by¯0the smallest bound of which all components are0except for the time component which is1. We have the following definition of valuations.
Definition 6. A valuation for a given formulaϕis a mappingv :cl(ϕ) → {0,1}
which satisfies the following conditions:
1. v(ϕ) = 1
2. v(>) = 1
3. v(¬ψ) = 1−v(ψ)
4. v(ψ1∨ψ2) = max(v(ψ1), v(ψ2))
5. v([∅b]ψ) =v(¬[Ab]¬ψ)
6. v([Cb]ψ)≤v([Cd]ψ)whereb≤difC6=∅orb≥dotherwise
7. v([Cb]ψ) = max{S
b0<b{v([Cb 0
]ψ)} ∪S
b1⊗b2=b{v([C
b1][Cb2]ψ)}}where
t(b)>1andC6=∅
In the following lemma, we determine when such a valuation qualifies as a starting point to build a model forϕ. The idea of the proof is similar to [14] which in turn builds on [16] but is made somewhat more complicated by the presence of resource bounds and the need to treat resource bounds for the empty coalition differently (for example, with respect to monotonicity).
Lemma 2. A formulaϕis satisfiable if and only if there exists a valuationvforϕ such that
1. If there are[Cb1
1 ]ψ1, . . . ,[Ckbk]ψk∈cl(ϕ)for somek >0such that:
• C1, . . . , Ckare pairwise disjoint
• for any[Cbj
j ]ψj such thatCj =∅,bj ≥ ⊕Cj06=∅bj0
• v([Cjbj]ψj) = 1for allj≤k
then∧j≤kψjis satisfiable.
2. If there are[Cb1
1 ]ψ1, . . . ,[Ckbk]ψk∈cl(ϕ)for somek >0such that:
• t(bj) = 1for allj ≤k
• C1, . . . , Ck−1are pairwise disjoint and all non-empty
• S
j<kCj ⊆Ck • ⊕j<kbj =bk
• v([Cbj
j ]ψj) = 1for allj < k
• v([Cbk
k ]ψk) = 0
then∧j<kψj∧ ¬ψkis satisfiable.
Proof. Firstly, we prove the left-to-right direction by defining a valuation based on a model satisfying the formulaϕ. In particular, let us assume thatϕis satisfiable by a modelM = (S, E, V) at some states ∈S. As before, for convenience, we extend the functionV to arbitrary formulas so thatV(φ) ={s∈S |M, s|=φ}.
We define a valuationvforcl(ϕ)as follows:
v(ψ) =
1 ifM, s|=ψ
0 otherwise
Based on the definition of the semantics forRBCL, it is straightforward to show thatv satisfies all the conditions listed in Definition 6. What remains is to prove that it also has the two properties listed in the lemma.
1. Assume that there are [Cb1
1 ]ψ1, . . . ,[C
bk
k ]ψk ∈ cl(ϕ) for somek > 0 such
that:
• t(bj) = 1for allj≤k
• C1, . . . , Ckare pairwise disjoint
• for any[Cjbj]ψj such thatCj =∅,bj ≥ ⊕Cj06=∅bj0
• v([Cbj
That isM, s|= [Cbj
j ]ψjfor allj≤k.
If there is some non-emptyCjthen, by super-additivity, we have thatM, s|=
[Cb](∧j≤k,Cj6=∅ψj) whereC = Sj≤kCj andb = ⊕j≤k,Cj6=∅bj. By coali-tion monotonicity, we have thatM, s |= [Ab](∧j≤k,Cj6=∅ψj). Furthermore,
super-additivity implies that, for allCj = ∅, M, s |= [Ab](∧j≤kψj).
Be-cause of playability,∅ ∈/ E(s)(Ab), thusV(∧j≤kψj) 6=∅. Therefore, there
existss0 ∈V(∧j≤kψj)and it is straightforward thatM, s0 |=∧j≤kψj.
If there is no non-emptyCjthen super-additivity gives us directly thatM, s|=
[∅b](∧
j≤kψj)in whichb = min{bj |j ≤k}. Applying the same argument
for playability, we have that there existss0 ∈V(∧j≤kψj)and it is
straight-forward thatM, s0|=∧j≤kψj.
2. Assume that there are [Cb1
1 ]ψ1, . . . ,[Ckbk]ψk ∈ cl(ϕ) for somek > 1 such
that:
• t(bj) = 1for allj≤k
• C1, . . . , Ck−1are pairwise disjoint and all non-empty
• S
j<kCj ⊆Ck • ⊕j<kbj ≤bk
• v([Cbj
j ]ψj) = 1for allj < k
• v([Cbk
k ]ψk) = 0
That is, M, s |= [Cbj
j ]ψj for all j < k andM, s 6|= [C bk
k ]ψk. By
super-additivity, we have that M, s |= [Cb](∧j<kψj) where C = Sj<kCj and
b= ⊕j<kbj. That is,V(∧j<kψj) ∈ E(s)(Cb). By coalition monotonicity
and bound monotonicity, we haveV(∧j<kψj)∈E(s)(Ckbk). Moreover, we
already haveM, s 6|= [Cbk
k ]ψk, thus,V(ψk) ∈/ E(s)(Ckbk). Then outcome
monotonicity implies thatV(ψk) 6⊇ V(∧j<kψj). SinceV(∧j<kψj) 6= ∅,
there must exist s0 ∈ V(∧j<kψj) \V(ψk) and it is straightforward that
M, s0 |=∧j<kψj∧ ¬ψk.
In the case wherek= 1, the proof is slightly different from above, as we do not have the setV(∧j<kψj). However, we make the use of the first
require-ment of playability which states thatS ∈E(s)(Cbk
k ), therefore,V(ψk)6=S.
Hence, there also existss0 ∈S\V(ψk)and it is obvious thatM, s0|=¬ψk.
satisfaction of the formulas in the two conditions of the lemma. That is, for any tuple([Cbj
j ]ψj)j≤kofcl(ϕ)which corresponds to one of the two conditions of the
lemma, as∧i≤kψj (or ∧i<kψj ∧ ¬ψk) is satisfiable, there is a model M0 which
satisfies∧i≤kψj (or ∧i<kψj ∧ ¬ψk) at some state s0 of M0. The modelM we
construct to satisfyϕwill be the union of all such witnessing modelsM0together with a new states0at whichϕwill be satisfied. We define the assignment function
and the effectivity structure at a state ofM by using the valuation function if the state iss0 or the assignment function and the effectivity structures of the witness
models otherwise. After constructing the modelM, we also have to show that the effectivity structure ofM is RB-playable so thatM then is a model forϕ. In the following, we detail the construction ofM.
For each tuple of formulas([Cbj
j ]ψj)j≤kofcl(ϕ)which corresponds to one of
two cases in the lemma, there is a model which satisfies its corresponding formula in which is either∧i≤kψj or∧i<kψj∧ ¬ψk. LetM1, . . . , Mnbe the enumeration
of the above witnessing models in whichMi = (Si, Ei, Vi)such that, without loss
of generality, allSi’s are assumed to be pairwise disjoint.
We construct a modelM = (S, E, V)as follows. The set of statesSis the set S
i≤nSi∪ {s0}wheres0is a new state. In order to defineV, we firstly introduce
a mappingV0 :cl(ϕ)→℘({s0})in which
V0(ψ) =
{s0} ifv(ψ) = 1
∅ otherwise
Then, we define an assignmentU : cl(ϕ) → ℘(S)by U(ψ) = S
i=0,...,nVi(ψ).
Note that by construction, we haveU(¬ψ) =S\U(ψ),U(ψ1∨ψ2) =U(ψ1)∪
U(ψ2). Now we define the mappingV forM by the projection ofU on the set of
propositional variablesp, that is,V(p) =U(p)(without loss of generality, we can assume that all propositional variables are contained incl(ϕ)).
Finally, we define the effectivity structureE in a way which is similar to that in the completeness proof.
ForC6=Aandbsuch thatt(b) = 1, we putX ⊆SinE(s)(Cb)if and only if X=Sor there are[Cb1
1 ]ψ1, . . . ,[Ckbk]ψk∈cl(ϕ)for somek >0such that:
• t(bj) = 1for allj≤k
• C1, . . . , Ckare pairwise disjoint, and all non-empty ifCis non-empty
• S
j≤kCj ⊆C
• ⊕j≤kbj ≤bifC 6=∅orb≤bj for allj≤kotherwise
• T