>Springer-Verlag 2003
Consistent estimation in the bilinear multivariate
errors-in-variables model
A. Kukush1, I. Markovsky1, S. Van Hu¤el1
ESAT, SCD-SISTA, K.U. Leuven, Kasteelpark 10, B-3001 Leuven-Heverlee, Belgium (e-mail: Sabine.VanHu¤[email protected])
Abstract. A bilinear multivariate errors-in-variables model is considered. It corresponds to an overdetermined set of linear equationsAXB¼C,AARmn, BARpq, in which the dataA,B, Care perturbed by errors. The total least squares estimator is inconsistent in this case.
An adjusted least squares estimator XX^ is constructed, which converges to the true valueX, as m!y, q!y. A small sample modification of the estimator is presented, which is more stable for smallmandq and is asymp-totically equivalent to the adjusted least squares estimator. The theoretical results are confirmed by a simulation study.
Key words: bilinear multivariate measurement error models, errors-in-variables models, adjusted least squares, consistency, asymptotic normality, small sample modification
1 Introduction
Many linear parameter estimation problems [VV91] can be reduced to solving an overdetermined set of linear equations
AXAB: ð1Þ
computes correction matricesDAandDBof minimal Frobenius norm in order to make the corrected set of equations
ðADAÞX ¼BDB
compatible and has become very popular in engineering since the early eighties due to the existence of computationally attractive algorithms based on the singular value decomposition (SVD) [GV80, VV91].
Since then several generalizations of the TLS estimator have been pre-sented. In particular, we mention the generalized TLS estimator, based on the generalized SVD, which provides consistent estimates ofX provided the measurement errors in ½A B are row-wise i.i.d. with zero mean and same covariance matrix, known up to a factor of proportionality.
In this paper we generalize the linear model in (1) to a bilinear model, represented as
AXBAC ð2Þ
This model can be considered as a special case of a polynomial model, namely a quadratic measurement error model [Ful87, CRS95].
It should be noted that the TLS principle can no longer be applied to model (2) in order to provide consistent estimates. Indeed, as mentioned in [Ful87], adding correction matrices DA, DB and DC of minimal Frobenius norm in order to makeðADAÞXðBDBÞ ¼CDC compatible results in biased estimates for the parameterX. In this paper an adjusted least squares (ALS) estimator [CRS95, CS98] ofXis presented and shown to be consistent. Next we give two examples where the bilinear measurement errors model (2) arises.
Example 1(Total production cost model). Assume that rproduction inputs
(materials, parts, labor, etc.) are combined to makenproducts. Letbk be the
price per unit of thek-th production input and xjk be the number of units of
thek-th production input, required to produce one unit of the j-th product.
The production costs per unit of the j-th product is the j-th element of the vector
y¼Xb:
Letajbe a required quantity to be produced of the j-th product. The total
quantity of thek-th production input needed is thek-th element of the vector z¼XTa:
The total production cost c is zTb, which gives a ‘‘single measurement’’
AXB¼Cmodel aTXb¼c:
and (approximate) total costs cil, corresponding to all combinations of the
given quantities to be produced and prices. Then the model is ða1ÞT
.. .
ðamÞT
2 6 6 4
3 7 7 5
|fflfflfflfflfflffl{zfflfflfflfflfflffl}
A
X½b1. . .bq |fflfflfflfflfflffl{zfflfflfflfflfflffl}
B
¼
c11 c1q .. .
.. .
cm1 cmq 2
6 4
3 7 5
|fflfflfflfflfflfflfflfflfflfflffl{zfflfflfflfflfflfflfflfflfflfflffl}
C :
Estimation ofxjk in the modelAXB¼C, can be interpreted as: estimate
the number of units of thek-th production input, required to produce one unit of the j-th product.
Example 2(Estimation of the fundamental matrix [MM98]). Two images are
captured by a mobile camera andmmatching pixels are located. Let
ui¼
uið1Þ
uið2Þ
1 2 6 4
3 7
5 and vi¼
við1Þ
við2Þ
1 2 6 4
3 7
5; i¼1;. . .;m
represent the homogeneous pixel coordinates in the first and second image respectively. The so calledepipolar constraintrelates the corresponding pixel coordinates by the model
viTFui¼0; i¼1;. . .;N; ð3Þ
where FAR33, rankðFÞ ¼2 is the fundamental matrix which is identical for all pairs of corresponding vectorsui,vi, 1aiaN. Estimation ofFfrom
the given noisy data is calledstructure from motion problem and is a central problem in computer vision.
In [KMV01] we modified the adjusted least squares estimator derived in this paper for the model (3).
The notation we use is standard. For any matrixT,tij denotes thei;j-th
element ofT. The bold symbol Edenotes mathematical expectation. It acts on the expression on the right up to an addition or subtraction sign. Condi-tional expectation of x, conditioned on C, is denoted by E½xjC. The nota-tion covðxÞdenotes the covariance matrixExTxExTExandAydenotes the pseudo-inverse ofA. In the formulas ‘‘const’’ denotesany constant value (for example, we can write const2 ¼const).
2 The model
We consider the model
AXB¼C: ð4Þ
Here AARmn, BARpq, CARmq are observations and XARnp is a
parameterof interest. We suppose that
A¼A0þAA~; B¼B0þBB~; C¼C0þCC~; ð5Þ
and that there existsX0ARnp such that A0X0B0¼C0:
HereA0,B0, andC0 arenominalortrue values andAA,~ BB, and~ CC~areerrors.
The matrixX0 is the nominal or true value of the parameter. From the point
of view of errors-in-variables models,CC~represents theequation error, whileAA~ andBB~represent themeasurement errors.
Looking for asymptotic results in the estimation ofXin the model (4), we fix the dimensions ofX,nand p, and let the number of measurements,mand
q, increase. The measurements are represented by the rows ofA, the columns
ofBand the elements ofC. For the whole paper we denote VAA~vEAA~TAA~; VBB~vEBB~BB~T:
The matrices VAA~and VBB~ are supposed to be known, while the variances of the
entries ofCC are unknown.~
Specific notation is set in the course of exposition. The assumptions used in the paper are enumerated. Global assumption for the paper is assumption (i). (i). The errors f~aaij;ib1;1ajang, fbb~kl;1akap;lb1g and fcc~il;ib1,
lb1gform three independent arrays of r.v., which are centered and pos-sess finite second order moments.
More assumptions are stated where necessary.
The model (4–5) is a bilinear regression measurement error model. In a scalar form it can be written as
cil¼
X
j;k
~ a
a0ijxjkbb~kl0 þcc~il; 1aiam;1alaq;
aij¼a0ijþaa~ij; 1aiam;1ajan;
bkl¼b0klþbb~kl; 1akap;1alaq:
ð6Þ
Here the design points a0
ij and b0kl are unobservable non-stochastic variables
and the true valuec0
il is a nonlinear function ofA0andB0.
The model (6) is a particular case of a quadratic model; it is bilinear with respect to the compound nuisance parameters½A0 B0. For polynomial
errors-in-variables models an ALS estimator is proposed in [CS98]. It is consistent. In [CRS95, Chapter 6], the method of corrected score functions is presented and in [Bar00] it is mentioned that an ALS estimator in a polynomial model is generated by the method of corrected score functions.
3 The score equation and an ALS estimator
We start with the LS objective function
qlsðX;A;B;CÞvkAXBCk
2
F: ð7Þ
In the space of matricesRnp, we introduce a scalar product hT;SivtrðTSTÞ; T;SARnp:
The derivativeqqls=qX is a linear functional on Rnp. It acts on H ARnp according to the rule
1 2
qqls
qX ðHÞ ¼trððAXBCÞðAHBÞ
TÞ ¼trðATðAXBCÞBTHTÞ
¼hATðAXBCÞBT;Hi: ð8Þ
We can identify the derivativeqqls=qX with a matrix, which represents it in
the equality (8). Thus it is redefined as 1
2
qqls
qX ¼ ðA
TAÞXðBBTÞ ATCBT:
In the absence of measurement errors, i.e. whenAA~¼0 andBB~¼0, see (5), the LS estimator is obtained by minimizing (7) or (what is asymptotically equiv-alent) via the score equation1
2qqls=qX ¼0. Thus the score function for the LS
method is
clsðX;A;B;CÞvðA
TAÞXðBBTÞ ATCBT;
and the LS estimator is consistent in the absence of measurement errors. Now, we are looking for a corrected score functionc, such that
E½cðX;A0þAA~;B0þBB~;CÞ jC ¼clsðX;A0;B0;CÞ for allX;A0;B0;C:
We seekcin the formc¼clsc1. We have by assumption (i)
E½clsðX;A0þAA~;B0þBB~;CÞ jC
¼clsðX;A0;B0;CÞ þEAA~ TAAXB~
0BT0 þEA T
0A0XBB~BB~TþVAA~XVBB~
with
c11ðB0ÞvVAA~XB0BT0;
c12ðA0ÞvAT0A0XVBB~:
To find a proper correction termc1 we consider Ec11ðB0þBBÞ ¼~ VAA~XB0BT0 þVAA~XVBB~;
Ec12ðA0þAAÞ ¼~ AT0A0XVBB~þVAA~XVBB~:
ð9Þ
Therefore
c1ðA;BÞ ¼c11ðBÞ þc12ðAÞ VAA~XVBB~
and
cðX;A;B;CÞ
¼ ðATAÞXðBBTÞ ATCBTVAA~XðBBTÞ ðATAÞXVBB~þVAA~XVBB~
¼ ðATAVAA~ÞXðBBTVBB~Þ ATCBT:
The ALS estimatorXX^ is defined from the equation
cðX;A;B;CÞ ¼0: ð10Þ
As an estimator we can take ^
X
XvðATAVAA~ÞyðATCBTÞðBBTVBB~Þy: ð11Þ
IfATAV ~ A
AandBBTVBB~are non-singular, then (11) satisfies (10). Later on
we shall show that these matrices are non-singular with probability tending to one as the number of measurements (rows ofAand columns ofB) is tending to infinity. Observe that (11) reduces to the generalized TLS estimator [VV89, Gal82], in the caseB¼Ip,BB~¼0 under the assumption (i).
4 Weak and strong consistency
We introduce further assumptions.
(ii). The rows of AA~are independent, i.e. ð~aaij;i1;1ajanÞ are
indepen-dent, the columns of BB~ are independent, i.e. ðbb~kl;1akap;lb1Þ are
independent, and all elements ofCC~are independent, i.e.ðcc~il;ib1;lb1Þ
are independent. (iii). Eaa~4
ijaconst,Ebb~4klaconst, andE~ccil2aconst.
(iv). We denote
and assume that
lmaxðVA0Þ þm
l2minðVA0Þ
!0 asm!y; and lmaxðVB0Þ þq
l2minðVB0Þ
!0 asq!y:
The assumption (iv) corresponds to the condition of weak consistency, given in [Gal82] for the maximum likelihood estimator in the model (1).
Theorem 1 (Weak consistency). Assume that assumptions (i) to (iv) hold.
Then the estimatorXX given in (11) converges to X^ 0in probability, as m!y
and q!y.
Proof.Denote
UAvATAVAA~; UBvBBTVBB~: ð12Þ
By assumption (iv),VA0 is non-singular formbm0 andVB0 is non-singular
forqbq0for some fixedm0andq0. Formbm0,qbq0, we rewrite equation
(10) in the form
VA01UAXUBVB01¼VA01ðATA0X0B0BTþATCBC~ TÞVB01: ð13Þ
For consistency, it is enough to show that VA01UA!
p
In and UBVB01 !
p
Ip; ð14Þ
VA01ðATA 0Þ !
p
In and B0B0TV
1 B0 !
p
Ip; ð15Þ
VA01ATCCB~ TVB01!p 0: ð16Þ
The proofs of (14)–(16) are given in the Appendix. r
The main probabilistic tool to prove the strong consistency is the following matrix analogue of the Rosenthal inequality, see [Ros70].
Lemma 1.Letfhi;ib1gbe a sequence of independent r.v.,Ehi¼0, i¼1;2;. . .
Then for any real number tb2, and for all mb1
EX
m
i¼1
hi
t
acðtÞmax X
m
i¼1
Ejhijt; X m
i¼1 Ehi2
!t=2
0 @
1 A;
where cðtÞdepends on t, but it does not depend on m.
We strengthen assumptions (iii) and (iv).
(v). For fixed real number rb2, Ejaa~ijj2raconst, Ejbb~klj2raconst, and Ej~ccilj2raconst.
(vi). For fixedm0b1,
Xy
m¼m0
mr=2
lminr ðVA0Þ
þl
r maxðVA0Þ
l2rminðVA0Þ
!
and for fixedq0b1
Xy
q¼q0
qr=2
lrminðVB0Þ
þl
r maxðVB0Þ
l2rminðVB0Þ
!
<y;
whereris defined in assumption (v).
Theorem 2 (Strong consistency). Assume that assumptions (i), (ii), (v) and
(vi) hold. Then the estimatorXX given in (11) converges to X^ 0 a.s., as m!y,
q!y.
Proof.See Appendix.
5 Rate of convergence
Let the assumptions of Theorem 1 hold. With probability tending to 1 we have
ðATAV ~ A
AÞXXðBB^ TVBB~Þ ¼ATCBT: ð17Þ
We setXX^vX0þDD^and considermbm0,qbq0, for whichVA0 andVB0 are
non-singular. From (17) we have
ðATAVAA~ÞDD^ðBBTVBB~Þ ¼ATðA0X0B0þCCÞB~ T
ðATAV ~ A AÞX0ðBB
TV ~ B
BÞ: ð18Þ
Using the notations (12) we have
VA01UADD^UBVB01¼VA01ATCBC~ TVB01þVA01ðATA0X0B0BT
ðATAV ~ A
AÞX0ðBBTVBB~ÞÞVB01vR1þR2: ð19Þ
By (14), the LHS of (19) equals
LHS¼ ðInþopð1ÞÞDD^ðIpþopð1ÞÞ ð20Þ
Next, see Section 4,
R1¼VA01ATCCB~ TVB01
¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
lmaxðVA0Þ þm
p
lminðVA0Þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
lmaxðVB0Þ þq
p
lminðVb0Þ
Opð1Þ: ð21Þ
R21 ¼VA01ðATA0X0B0BTVA0X0VB0ÞVB01
¼ Inþ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
lmaxðVA0Þ
p
lminðVA0Þ
Opð1Þ
!
X0 Ipþ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
lmaxðVB0Þ
p
lminðVB0Þ
Opð1Þ
!
X0; ð22Þ
kR21kF ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
lmaxðVA0Þ
p
lminðVA0Þ
þ
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
lmaxðVB0Þ
p
lminðVB0Þ
!
Opð1Þ ð23Þ
and
R22 ¼VA01ðATAVAA~ÞX0ðBBTVBB~VA0X0VB0ÞVB01
¼ Inþ
ffiffiffiffi m p
þ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðVA0Þ
p
lminðVA0Þ
Opð1Þ
! X0
Ipþ
ffiffiffi q p
þ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðVB0Þ
p
lminðVB0Þ
Opð1Þ
!
X0; ð24Þ
kR22kF ¼
ffiffiffiffi m p
þ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðVA0Þ
p
lminðVA0Þ
þ ffiffiffi q p
þ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðVB0Þ
p
lminðVB0Þ
!
Opð1Þ: ð25Þ
Therefore from (19), (20), and (21) to (25) we obtain kXX^X0k
F ¼ ðumþvqÞOpð1Þ; ð26Þ
where
umv
ffiffiffiffi m p
þ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðVA0Þ
p
lminðVA0Þ
; vqv
ffiffiffi q p
þ ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffilmaxðVB0Þ
p
lminðVB0Þ
: ð27Þ
6 Asymptotic normality
6.1 Expansion forDD^
Now, we strengthen assumption (iv). (vii). 1
mVA0 !VAy as m!y, and1qVB0 !VBy as q!y, whereVAy and VBy are positive definite matrices.
Under (vii), 1
mlmaxðVA0Þ !lmaxðAAyÞ>0, and 1
mlminðVA0Þ !lminðAAyÞ>
0, similarly forVB0, therefore (vii) implies (iv).
We shall assume (i) to (iii) and (vii), and in the process of establishing asymptotic normality, we shall set some more assumptions.
From (19), (20) and (21) we have now
ðInþopð1ÞÞDD^ðIpþopð1ÞÞ ¼
1 ffiffiffiffiffiffiffi mq
R21¼ ðInþVA01AA~ TA
0ÞX0ðIpþB0BB~TVB01Þ X0
¼VA01AA~TA0X0þX0B0BB~TVB01þ
1 ffiffiffiffiffiffiffi mq p Opð1Þ;
see (22). Next, see (24),
R22¼ ðInþVA01ðAA~ TA
0þAT0AA~þAA~ TAA~V
~ A AÞÞX0
þ ðIpþ ðBBB~ 0TþB0BB~TþBB~BB~T VBB~ÞVB01Þ X0
¼VA01ðAA~TA
0þAT0AA~þAA~TAA~VAA~ÞX0
þX0ðBBB~ T0 þB0BB~TþBB~BB~TVBB~ÞVB01þ
1 ffiffiffiffiffiffiffi mq p Opð1Þ;
and
R21R22¼ VA01L1X0X0L2VB01þ
1 ffiffiffiffiffiffiffi mq
p Opð1Þ: ð29Þ
Here
L1vAT0AA~þ ðAA~TAA~VAA~Þ; L2vBBB~ 0Tþ ðBB~BB~TVBB~Þ: ð30Þ
Thus
ðInþopð1ÞÞDD^ðIpþopð1ÞÞ
¼ 1
mVA0 1
L1
ffiffiffiffi m p X0
! 1
ffiffiffiffi m
p þ X0
L2
ffiffiffi q
p 1
qVB0 1!
1 ffiffiffi q p
þ 1ffiffiffiffiffiffiffi mq
p Opð1Þ: ð31Þ
By assumption (vii), 1
mVA0 and 1qVB0 converge to the corresponding positive
definite matricesVAyandVBy. Random matricesL1andL2are independent
by (i). We need an assumption which ensures the convergence in distribution of 1ffiffiffi
m
p L1 andp1ffiffiqL2.
6.2 Behavior ofp1ffiffiffimL1
We denote byaa~iT,a0Ti andaiT,ib1, the rows ofAA,~ A0andArespectively.
~ A A¼ ~ a aT 1 .. . ~ a aT m 2 6 6 4 3 7 7
5; A0¼
a0T 1 .. . a0T m 2 6 6 4 3 7 7
We have
L1¼
Xm
i¼1
ða0iaa~iT þaa~i~aaiTEaa~iaa~iTÞ: ð32Þ
To apply the central limit theorem (CLT), we considerl1vvecðL1Þ. We have
vecða0iaa~iTÞ ¼ ðInna0iÞaa~i; ð33Þ
and
vecðaa~iaa~iTÞ ¼aa~inaa~i: ð34Þ
Therefore, see (32) to (34),
l1¼
Xm
i¼1
ða0T
i naa~iþaa~in~aaiEaa~inaa~iÞ: ð35Þ
We introduce the following assumptions in order to apply the CLT to 1ffiffiffi m
p l1.
(viii). The rowsf~aaT
i ; ib1gare identically distributed as random vector~aa. By
assumption (i),~aa is centered and has covariance matrixV~aa¼m1VAA~.
In order to distinguish the vectorsaa~ifrom the scalars~aai, we will use
the notation~aaðiÞfor the elements of~aa. (ix). For fixedd>0,Ej~aaðjÞj4þd<y, j¼1;. . .;n:
(x). For eachfj;k;lgHf1;. . .;ng,E~aaðjÞ~aaðkÞ~aaðlÞ ¼0:
Assumption (x) holds, e.g., when ~aa has a symmetric distribution. It is possible to avoid (x), but then the asymptotic covariance matrix ofXX^ will be more complicated. For instance, (x) holds in the case of normal errors~aaðjÞ.
(xi). For somet>0, 1 m
Pm i¼1ka0ik
2þt
aconst, and 1
mmax1aiamka0ik 2
!0. Denote
UA0v lim
m!y 1 mðInna
0
iÞV~aaðInna0iÞ T
¼V~aanVAy;
and
UA00vcovð~aanaa~E~aan~aaÞ
¼Eðð~aan~aaE~aanaÞð~a~ aan~aaE~aan~aaÞTÞ
¼Eðð~aa~aaTÞnð~aa~aaTÞÞ vecðV~aaÞðvecðV~aaÞÞT: ð36Þ
The elements of Eðð~aa~aaTÞnða~~aaaTÞÞ are the fourth moments of ~aa, EaaðiÞ~ ~aaðjÞ~aaðkÞaðlÞ. We note that~a UA0andUA00are positive semidefinite. The last assumption in this subsection is assumption (xii).
Now, under new assumptions (viii) to (xi) we apply the CLT to 1ffiffiffi m
p l1, see (35).
We have
cov l1ffiffiffiffi m p
¼1
mcovðl1Þ ¼ 1 m
Xm
i¼1
ðInna0iÞVaa~ðInna0iÞ Tþ
UA00
and covðl1= ffiffiffiffim
p
Þ !UAvUA0þUA00, which is positive definite.
Next, we check the Lyapunov condition, withvvminðt;d=2Þ, wheretand
dare defined in assumptions (ix) and (xi). We have, see (35),
1 m1þv=2
Xm
i¼1
ðEkðInna0iÞ~aak 2þv
F þEk~aanaa~E~aan~aak 2þv F Þ
a 1
m1þv=2
Xm
i¼1
const ka0 ik
2þvEk~
a
ak2þvþconstm !
aconst 1
mv=2!0; asm!y:
We have also by assumptions (iii), (viii) and (xi), that the second moments of the summands in (35) are bounded. Therefore by the CLT
l1
ffiffiffiffi m
p !d Nð0;UAÞ:
Then, see (31),
vec 1 mVA0 1
L1
ffiffiffiffi m p X0
!
¼ X0Tn 1 mVA0 1!
l1
ffiffiffiffi m
p !d ðX0TnVAy1Þ Nð0;UAÞ
¼Nð0;SAÞ; asm!y
with
SAvðX0nVAy1Þ T
UAðX0nVAy1Þ: ð37Þ
6.3 Behavior of 1ffiffi
q
p L2
We list similar assumptions forB0 andBB.~
(viii)0. The columnsfbb~
l;lb1gare identically distributed as random vector~bb.
Here BB~¼ ½bb~1. . . ~bbq. By assumption (i),~bb is centered, with covariance
(ix)0. For fixedd>0,Ej~bbðkÞj4þd<y
,k¼1;. . .;p. (x)0. For eachfj;k;lgHf1;. . .;pg,E~bbðjÞ~bbðkÞ~bbðlÞ ¼0. (xi)0. For somet>0,1
q
Pq l¼1kbi0k
2þt
aconst, and1
q max1alaqkbl0k2!0.
Denote
UB0v lim
q!y 1 q
Xq
l¼1
ðb0
l nIpÞV~bbðb0l nIpÞT ¼VBynV~bb;
and
UB00vcovð~bbnbb~E~bbn~bbÞ
¼Eð~bbn~bbE~bbnbÞðb~ ~bbn~bbE~bbn~bbÞT
¼Eðð~bb~bbTÞnð~bb~bbTÞÞ vecðV~
b
bÞðvecðV~bbÞÞ T:
(xii)0. U
BvUB0þUB00is positive definite.
Then similarly to the previous subsection, we have
l2vvecðL2Þ ¼
Xq
l¼1
ððb0
l nIpÞ~bbþ~bbnb~bE~bbn~bbÞ:
l2
ffiffiffi q
p !d Nð0;UBÞ;
and
vec X0
L2
ffiffiffi q
p 1
qVB0 1!
¼ 1
qVB0 1
nX0 !
l2
ffiffiffi q
p !d ðVBy1nX0Þ Nð0;UBÞ
¼Nð0;SBÞ; ð38Þ
whereSBvðVBy1nX0ÞUBðVBy1nX0ÞT. From (31) we obtain
ðInþopð1ÞÞDD^ðInþopð1ÞÞ ¼
1 ffiffiffiffi m p xmþ
1 ffiffiffi q p hqþ
Opð1Þ
ffiffiffiffiffiffiffi mq
p asm!y;q!y;
where fxmg and fhqg are independent random matrices, and vecðxmÞ ! d
Nð0;SAÞasm!yand vecðhqÞ ! d
Letm¼mðrÞandq¼qðrÞ, with r
m!lA,qr!lB, asr!y, where 0lA,
lB<y,lAþlB>0. Then we have
ðInþopð1ÞÞð ffiffir
p ^
D
DÞðInþopð1ÞÞ ¼
ffiffiffiffi r m r
xmþ
ffiffiffir
q r
hqþOpð1Þffiffi r
p
ffiffiffiffiffiffiffiffiffiffir
m
r q r
:
Therefore we proved the following asymptotic normality result.
Theorem 3.Assume that assumptions (i) to (iii), (vii) to (xii), and (viii)0 to
(xii)0 hold. Then for m¼mðrÞ, q¼qðrÞ, r
mðrÞ!lA,
r
qðrÞ!lB, as r!ywith
0alA<y,0alB<y,lAþlB>0, we have
ffiffi r p
vecðXX^X0Þ ! d
Nð0;lASAþlBSBÞ:
Now, we investigate the rank of the matrixlASAþlBSB. We analyze (37).
Suppose thatX0 is of full rank, i.e. rankðX0Þ ¼minðn;pÞ. Then
rankðXT 0 nV
1
AyÞ ¼rankðX0nVAy1Þ ¼nminðn;pÞ: UAhas full rank equaln2, and
rankðSAÞ ¼nminðn;pÞ:
Similarly
rankðSBÞ ¼pminðn;pÞ:
Denote
SvlASAþlBSB:
– IflA>0,lB>0 then rankðSÞ ¼maxðrankðSAÞ;rankðSBÞÞ ¼np, i.e.Sis a
positive definitenpnpmatrix.
– IflA¼0 then rankðSÞ ¼rankðSBÞ ¼pminðn;pÞ, andSis positive definite
whennap.
– IflB¼0 then rankðSÞ ¼rankðSAÞ ¼nminðn;pÞ, andSis positive definite
whennbp.
In the case whenSis positive definite, we have kpffiffirS1=2vecðDD^Þk2!d wnp2 asr!y;
or
r ðvecðDD^ÞÞTS1vecðDD^Þ !d wnp2 asr!y: ð39Þ
6.4 Approximate expression
Next, we give an approximate expression forS, constructed via observations, which converges in probability toS.
see (37),
SAapp¼ XX^n 1
mA
TAV ~ A A
1!T
UAapp XX^n 1
mA
TAV ~ A A
1! ;
UAapp¼Uapp0 ;AþU
00
app;A;
Uapp0 ;A¼V~aan
1
mA
TAV ~ a a
; and Uapp00 ;A¼UA00:
Now, see (38),
SBapp¼ 1
qBB
TV ~ B B
1
nXX^ !
UBapp 1
qBB
TV ~ B B
1
nXX^ !T
;
UBapp¼Uapp0 ;BþUapp00 ;B
UB1app¼ 1
qBB
TV ~bb
nVbb~; and UB2app¼UB200:
The approximate asymptotic covariance matrixSapp can be used to con-struct an asymptotic confidence ellipsoid for vecðX0Þ, based on the convergence
r ðvecðDD^ÞÞTðSappÞ1vecðDD^Þ !d wnp2 ; asr!y;m!y;q!y:
7 Small sample correction
7.1 Construction
In [CST00] a small sample estimator for a polynomial regression with errors in the variables was constructed. We apply this approach for the model (4), (5). Our goal is to modify the ALS estimator (11) in such a way that it shows good results in small samples without loosing the asymptotic properties for large samples.
We construct a modification of the ALS estimator as follows. For arbi-trary positive integersbandg,bag, denote
fbgv½1|fflffl{zfflffl}. . .1 b
0. . .0 |fflffl{zfflffl}
gb
T ARg1:
First we introduce two matrices of the same size, withtaq
TAv
1 ffiffi t
p Cftq A
T
1 ffiffi t
p Cftq A
; and WAv
0 0 0 VAA~
;
and letlAbe the smallest positive root of
Our polynomial measurement error model is of degreed ¼2. Following the advice of [CST00] we setavdþ1¼3. We define
mA¼
ma
m ; if lA>1þm1; lAðmaÞ
mþ1 ; if lAa1þ 1 m:
(
Similarly we introduce the other two matrices of equal size,sam,
TBv
1 ffiffi s
p CTfsm BT
T
1 ffiffi s
p CTfsm BT
; and WBv
0 0 0 VBB~
;
and letlBbe the smallest positive root of
detðTBlWBÞ ¼0: ð41Þ
We set
mB¼ qa
q ; if lB>1þ1q; lBðqaÞ
qþ1 ; if lBa1þ 1 q:
8 < :
The modified estimator is defined by ^
X
XmvðATAmAVAA~ÞyATCBTðBBTmBVBB~Þy: ð42Þ
7.2 TAand TBare positive definite, a.s.
We need the next assumption.
(xiii). The following distributions have no atoms
Lðcc~ilÞ; ib1;lb1; Lðaa~ijÞ; ib1;jan; Lðbb~klÞ; kap;lb1:
We remind that the distribution of a r.v.xhas no atoms i¤Pðx¼aÞ ¼0, for allaAR.
Lemma 2.Assume that assumptions (i) and (xiii) hold. Then for all mbnþ1,
qb1, taq, TAis positive definite a.s., and for all mb1, qbpþ1, sam, TB
is positive definite a.s.
Proof. We shall give a proof forTA only. The sum of independent r.v. with
non-atomic distribution also has non-atomic distribution, hence the compo-nents of 1ffiffi
t
p Cftq have non-atomic distribution. We suppose that mbnþ1,
qb1. Denote p1ffiffitCftqv½u1. . .umT. It is su‰cient to show that the vectors
h1Tv u1 a1
;. . .;hnTþ1v unþ1 anþ1
ð43Þ
are linearly independent, a.s. Note that h1;. . .;hnþ1 are independent as
ran-dom vectors. Using induction bynb1 we prove the following statement. Let h1;. . .;hnþ1 given in (43) be independent random vectors, aiARn1, uiAR, andu1;. . .;unþ1have non-atomic distribution, and all the coordinates
det h1
.. .
hnþ1
2 6 4
3 7
500; a:s:
a). Indeed, forn¼1
det h1 h2
¼u1a2u2a1 and a100; a:s:
Then
Pðu1a2u2a1¼0Þ ¼EðE½Iðu1a2u2a1¼0Þ ja1;a2Þ;
where IðÞ denotes the indicator function of a random event. But for deterministica1;a2;a100, we have:Lðu1a2u2a1Þis non-atomic because
it is a sum of two independent r.v. with non-atomic distribution (ifa200)
or it is exactlyLðu2a1Þ, which is non-atomic. Then E½Iðu1a2u2a1¼0Þ ja1;a2 ¼0 a:s:
andPðu1a2u2a1¼0Þ ¼0. We proved the statement forn¼1.
b). Suppose it holds forn1b1, and we prove it forn.
det h1
.. .
hnþ1
2 6 4
3 7 5¼X
nþ1
i¼1
uiAi;
where Ai¼Aiða1;. . .;anþ1Þ is the corresponding algebraic complement.
Here
Anþ1¼Gdet
a1
.. .
an
2 6 4
3 7
500 a:s:
by the assumption of induction. Then
P X
nþ1
i¼1
uiAi¼0
!
¼E E I X
nþ1
i¼1
uiAi¼0
!
ja1;. . .;anþ1
" #!
¼0;
because for deterministic A1;. . .;Anþ1, Anþ100, we haveLðPni¼þ11uiAiÞ
is non-atomic. Thus we proved the statement forn. This accomplishes the proof of the auxiliary statement.
Thus a.s. rank 1ffiffi t
p Cftq A
h i
¼nþ1, and TA is positive definite a.s.
7.3 The matrices ATAm
AVAA~and BBTmBVBB~are positive definite, a.s.
We suppose thatmbnþ1,qbpþ1. We may and do assume thatTAand
TB are positive definite. IfVAA~00 andVBB~00 thenlA andlB exist, because
(40) is equivalent to
det TA1=2WAT
1=2
A
1
lInþ1
¼0;
and this equation has a positive solutionl, asTA1=2WAT1 =2
A is positive
semi-definite andTA1=2WATA1=200; the same for (41).
Now, we show thatATAm
AVAA~is positive definite. We have
mAama
mþ1lA
and
ATAmAVAA~bATA
ma
mþ1lAVAA~
¼ma
mþ1ðA
TAl AVAA~Þ þ
aþ1
mþ1A
TAb aþ1
mþ1A
TA>0:
SimilarlyBTBm
BVBB~is also positive definite. Thus formbnþ1,qbpþ1
we have a.s. ^ X
Xm¼ ðATAmAVAA~Þ1ATCBTðBBTmBVBB~Þ1:
7.4 XX^mhas the same asymptotic properties asXX^
First we show that PðlA>1Þ !1 as m;q!y, and the same for lB. We
need some new assumptions. (xiv). t¼tm¼oð3ffiffiffiffim
p
Þ, m!y, taq and s¼sq¼oðp3ffiffiffiqÞ, q!y, sam and tm, sq are nondecreasing sequences of numbers. E.g., it is
pos-sible to sett¼ ½m1=4ands¼ ½q1=4, where ½are Gaussian brackets, if
m=q!l, with arbitrarylAð0;yÞ.
(xv). f~ccil;ib1;lb1gare identically distributed andE~cc112 >0.
Lemma 3. Assume (i) to (iii), (vii), (viii), (viii)0, (xiv) and (xv). Then for
m!y, q!y, we have
PðlA>1Þ !1 and PðlB>1Þ !y:
Proof.See Appendix.
Theorem 4.Assume (i) to (iii), (vii), (viii), (viii)0, (xiv) and (xv). Then for m¼mðuÞ, q¼qðuÞ, u=mðuÞ !lA, u=qðuÞ !lB, as u!y, with0alA<y,
0lB<y,lAþlB>0, we have
p min
u!y ffiffiffi u p
Proof.We follow the line of [CST00]. From Lemma 3 and the definition ofmA, see Subsection 7.1, we obtain that with probability tending to one,
ma
mþ1 amAa
ma
m ;
and
0aðmA1Þ
ffiffiffiffi m p
a affiffiffiffi
m
p :
Therefore
p lim
m!y q!y
ffiffiffiffi m p
ðmA1Þ ¼0: ð44Þ
Similarly
p lim
m!y q!y
ffiffiffi q p
ðmB1Þ ¼0: ð45Þ
Now, we consider the di¤erence between the estimatorsXX^XX^m. From (9) and
(42) we have ðATAV ~ A
AÞXXðBB^ TVBB~Þ ¼ ðATAmAVAA~ÞXX^MðBBTmBVBB~Þ:
We setmA¼1þph1ffiffiffim,mB¼1þph2ffiffiq,h1! p
0,h2! p
0 andXX^mvXX^þXX~.
We have
ðATAm
AVAA~þ ðmA1ÞVAA~ÞXX^ðBBTmBVBB~þ ðmB1ÞVBB~Þ
¼ ðATAm
AVAA~ÞðXX^þXX~ÞðBBTmBVBB~Þ;
ðATAmAVAA~ÞXðBBX^ TmBVBB~Þ
¼ hffiffiffiffi1 m
p VAA~XX^ðBBTVBB~Þ þ
h2
ffiffiffi q
p ðATAVAA~ÞXX V^ BB~þ
h1h2
ffiffiffiffiffiffiffi mq
p VAA~XX V^ BB~:
But under the assumptions of Section 4 we have as pffiffiffiffimðmA1Þ !p 0, ffiffiffi
q p
ðmB1Þ !p 0,
ðInþopð1ÞÞXXðI~ pþopð1ÞÞ ¼
h1
ffiffiffiffi m
p Opð1Þ þ
h2
ffiffiffi q
p Opð1Þ þ
h1h2
ffiffiffiffiffiffiffi mq p Opð1Þ
¼opð1Þffiffiffiffi m
p þopð1Þffiffiffi q
p þopffiffiffiffiffiffiffið1Þ mq
p :
We assume that m¼mðuÞ, q¼qðuÞ, and we have as u!y that m!y,
q!yand
u
m!lA;
u
Then we have asu!y
ðInþopð1ÞÞð ffiffiffiu
p ~
X
XÞðIpþopð1ÞÞ
¼ ffiffiffiffi
u m r
opð1Þ þ
ffiffiffi u q r
opð1Þ þ
ffiffiffiffi u m r ffiffiffiu
q r o
pð1Þ
ffiffiffi u
p : r
From Theorem 4 under the conditions of asymptotic normality ofXX^, see Subsections 6.2 and 6.3, we will have
ffiffiffi u p
vecðXX^mXX^Þ ! d
Nð0;lASAþlBSBÞ:
IflASAþlBSB>0 then we can say thatXX^mandXX^have the same asymptotic
properties. It happens, see Subsection 6.3, if – eitherlA>0,lB>0,
– orlA¼0 andnap,
– orlB¼0 andnbp.
Thus in the case n¼p we guarantee that XX^m and XX^ are asymptotically
equivalent only for the convergencem!y,q!y,m=q!l,lAð0;yÞ.
8 Examples
In this section we apply the ALS estimator to a hypothetical example. We consider the model (4), (5) withm¼qandn¼p¼2, i.e.
A |{z}
m2
X |{z}
22
B |{z}
2m
¼|{z}C
mm :
The true data is
A0¼
I2
.. .
I2
2 6 4
3 7
5; B0 ¼ ½I2. . .I2; and C0¼
I2 I2
.. .
.. .
I2 I2
2 6 4
3 7 5;
and the true value of the parameter isX0¼I2. The perturbationsA,A~ BB~andCC~
are selected in three di¤erent ways.
1. Equally sized errors. All elementsaij,bkl,cilare independent, centered, and
normally distributed with common variance 0.01.
2. Di¤erently sized errors. All elements aij,bkl,cil are independent, centered,
3. Correlated errors. All elements aij, bkl, cil are independent and normally
distributed. All rows ofAA~have covariance 0.01 5 11 1 and the elements are independent from row to row. All columns ofBB~have covariance 0.01 1 11 5 and the elements are independent from column to column.
The estimation is performed for increasing number of measurementsm. As measure of the estimation quality, we use the empirical (relative) mean square error
eðmÞ ¼ 1
N XN
s¼1
kX0XX^ðsÞk2F
kX0kF2 ;
whereXX^ðsÞis the estimate computed for thes-th noise realization.
The ALS and the small sample modified ALS estimators are compared with the LS estimator
^ X
XlsvðATAÞ
y
ATCBTðBBTÞy
;
and with the partial LS estimators, ^
X
XpavTLS solution of XB¼ ðA TAÞy
ATC
and ^ X
XpbvTLS solution ofAX ¼CB
[image:21.439.63.236.452.590.2]TðBBTÞy:
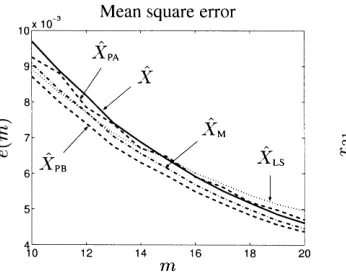
Figure 1 shows small sample size result for equally sized errors; the num-ber of measurements m is between 10 and 20. On the left plot is the mean square error of estimationeðmÞ for LS (dotted line), ALS (solid line), small sample modified ALS (dashed-dotted line) and partial LS (dashed lines) esti-mators. The plots are averaged forN¼200 noise realizations.
[image:21.439.72.386.457.589.2]The right plot of Figure 1 illustrates application of the asymptotic normality results for confidence region computation, see Subsection 6.4. The
confidence region of xx^mvvecðXX^mÞ with 1a confidence probability is the
ellipsoid
E1appaðxx^mÞ ¼ xj ðxxx^mÞðS appÞ1
ðxxx^mÞa
1 mðw
2 lÞa
;
whereðwl2Þais theaquantile of thew2l distribution, i.e.Pðwl2bðwl2ÞaÞ ¼a, and lis the number of degrees of freedom. Forxx^m in the example,l¼4.
In order to be able to visualize the results, we use the first two elements of ^
x
xm, denoted byxx^mð1:2Þ. Forxx^mð1:2Þ,l¼2 and the approximate asymptotic
covariance matrix is the upper left, 2 by 2 submatrix ofSapp.
The computed confidence regionE0app:9 ð^xxmÞform¼20 is shown as shaded
area on the plot. The symbol ‘‘4’’ indicates the true value point½1 0T and the symbol ‘‘=’’ indicates the point estimatexx^Mð1:2Þ.
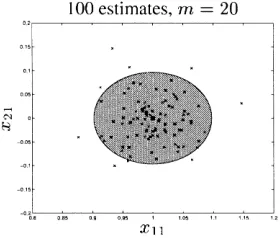
Figure 2 shows analogous results for equally sized errors for larger sample size;mbetween 20 and 100.
Figure 3, shows how the estimates are clustered. Again ‘‘4’’ corresponds to
the true value½1 0T. The ‘‘=’’ symbols correspond to 100 estimatesxx^Mð1:2Þ.
The shaded area is the ellipsoid,
E1aðxx^mÞ ¼ xj ðxxx^mÞS
1ðxxx^ mÞa
1 mðw
2 lÞa
[image:22.439.64.371.52.176.2]
;
Fig. 2. Equally sized errors, result formAf20;. . .;100g
Table 1.Percentage of estimates inside inside
^
x
xMð1:2ÞAE0:9ðxx^Mð1:2ÞÞ 89%
^
x
xMAE0:9ðxx^MÞ 91%
[image:22.439.59.199.211.330.2]described by the true asymptotic covariance matrixS, see (39), and centered at the true valuexx^mð1:2Þ.
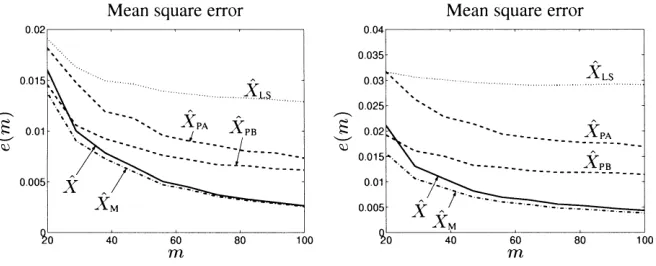
Figure 4 show the mean square error of the compared estimators for di¤erently sized uncorrelated errors (left plot) and for correlated errors (right plot).
9 Conclusion
We considered the multivariable modelAXB¼C. In the situation when the TLS estimator is inconsistent, we construct the ALS estimator, which is con-sistent. We gave the conditions of weak and strong consistency, and of asymp-totic normality. It turns out that the asympasymp-totic covariance matrix of the esti-mator does not depend upon the covariance structure ofCC. We introduced a~ small sample modification of the estimator, which has better properties for small samples and preserves the asymptotic properties of the estimator.
An open question is what are the optimality properties of the ALS estimator. In [KM00] for the modelAX ¼B in the scalar case it was shown that the ALS estimator is asymptotically e‰cient in the situation where VAA~
is known exactly and Ebb~2kl are known up to a constant factor. It would be interesting to check the following conjecture:
In the modelAXB¼Cthe ALS estimator is asymptotically e‰cient in the situation whereVAA~and VBB~ are known exactly and E~ccil2 are known
up to a constant factor.
10 Appendix
10.1 Proof of (14)
We have
[image:23.439.62.390.50.183.2]VA01UA¼InþVA01ðAA~TAA~VAA~Þ þVA01ðAA~TA0þAT0AAÞ~: ð46Þ
Next
EkV1
A0 ðAA~TAA~VAA~Þk2FakVA01k2EkAA~TAA~VAA~kF2 ð47Þ
andkV1 A0 k ¼l
1
minðVA0Þ. By (ii) and (iii), we have
EkAA~TAA~VAA~k2F ¼
Xn
i;k¼1
var X
m
j¼1
~ a aji~aajk
!
¼ X
n
i;k¼1
Xm
j¼1
varð~aajiaa~jkÞaconstm;
thus by (iv)
EkVA01ðAA~TAA~VAA~Þk2Fa
constm
l2minðVA0Þ
!0 asm!y; ð48Þ
this proves thatV1
A0 ðAA~TAA~VAA~Þ ! p
0. Next
EkV1
A0 ðAA~TA0þAT0AAÞk~ 2 Fa
2
l2minðVA0Þ EkAT
0AAk~ 2
F ð49Þ
and
EkAT0AAk~ 2 F ¼
Xn
i;k¼1
E X
m
j¼1
aji0aa~jk
!2
¼ X
n
i;k¼1
Xm
j¼1
ðaji0Þ 2
varðaa~jkÞ
aconstX
n
i¼1
Xm
j¼1
ða0 jiÞ
2
aconstlmaxðVA0Þ
and from (49) under assumption (iv) we have
VA01ðAA~TA0þAT0AAÞ !~ p
0: ð50Þ
Now, (46), (48) and (50) imply the first relation in (14), and the second one in (14) holds similarly.
10.2 Proof of (15)
VA01ðATA
0Þ ¼InþVA01AA~TA0;
and this converges in probability toIn, see Subsection 10.1. The second
10.3 Proof of (16)
We have
kVA01ATCCB~ TVB01kFa 1
lminðVA0ÞlminðVB0Þ
kATCCB~ TkF; ð51Þ
and
EkATCCB~ Tk2 F ¼
Xn
j¼1
Xp
k¼1
E X
m
i¼1
Xq
l¼1
aijcc~ilbkl
!2
¼ X
i;j;k;l
Ea2ijvarð~ccilÞEb2kl
aconst X
m
i¼1
Xn
j¼1 Eaij2
! Xp
k¼1
Xq
l¼1 Eb2kl
!
aconst ðlmaxðVA0Þ þmÞðlmaxðVB0Þ þqÞ:
Then from (51) we have
EkVA01ATCCB~ TVB01k2FaconstðlmaxðVA0Þ þmÞ
l2minðVA0Þ
ðlmaxðVB0Þ þqÞ
l2minðVB0Þ ;
and this tends to zero, asm!y,q!yby assumption (iv).
10.4 Proof of Theorem 2
We have to show that in (14) to (16) the convergence is with probability one. After that the statement of Theorem 2 will follow from equation (13) for the estimatorXX.^
We use Lemma 1. First, see (46). Consider
EkAA~TAA~VAA~kFr ¼E
Xm
i¼1
ð~aaiTaa~iEaa~iT~aaiÞ
r
F
aconstmr=2;
because by (v)Ek~aak2raconst. Then
EkVA01ðAA~TAA~VAA~ÞkFraconst
mr=2
lrminðVA0Þ ;
Xy
m¼m0
mr=2
lrminðVA0Þ <y
and by Borel-Cantelli lemma
Next, consider
kAA~TA0þAT0AkA~ Fa2kAT0AAk~ F
and
EkAT0AAk~ F2r¼E X m
i¼1
a0Ti ~aai
2r
F
aconst X
m
i¼1
ka0ik2 !r
aconstlrmaxðVA0Þ:
Therefore,
EkV1
A0 ðAA~TA0þAT0AAÞk~ 2r
aconstl
r maxðVA0Þ
l2rminðVA0Þ ;
Xy
m¼m0
lrmaxðVA0Þ
l2rminðVA0Þ ay;
and by Borel-Cantelli lemma
VA01ðAA~TA0þAT0AAÞ !~ 0 a:s:; asm!y:
Thus, see (46),VA01UA!In a.s., as m!y. Similarly, UBVB01!Ip a.s., as
q!y.
Secondly, in (15) we also have convergence a.s., compare with the proof of Theorem 1.
Thirdly, consider
E½kATCCB~ TkF2rjAA~;BB ¼~ E X m
i¼1
Xq
l¼1
aTi cc~ilblT
2r
F
jAA~;BB~ 2
4
3 5
aconst X
m
i¼1
Xq
l¼1 E½kaT
i ~ccilblTk
2rjAA~;BB~
þ X
m
i¼1
Xq
l¼1
E½kaiTcc~ilblTk 2
jAA~;BB~ !r!
:
Now, Xm
i¼1
Xq
l¼1
E½kaiTcc~ilblTk 2r
jAA~;BB~ aconstX
m
i¼1
kaik2r
Xq
l¼1
kblk2r;
and
E X
m
i¼1
Xq
l¼1
E½kaTi ~ccilblTk 2r
jAA~;BB~ !
Next,
E X
m
i¼1
Xq
l¼1
E½kaiT~ccilblTk 2
jAA~;BB~ !r
aconstE X m
i¼1
kaik2
!r
E X
q
l¼1
kblk2
!r
aconst ðlrmaxðVA0Þ þmrÞðlrmaxðVB0Þ þqrÞ
Therefore
EkATCCB~ TkF2raconst ðlrmaxðVA0Þ þmrÞðlmaxr ðVB0Þ þqrÞ;
and, see (46),
EkVA01ATCCB~ TVB01k2rF aconstl
r
maxðVA0Þ þmr
l2rminðVA0Þ
lmaxr ðVB0Þ þqr
l2rminðVB0Þ ;
Xy
m¼m0
Xy
q¼q0
lrmaxðVA0Þ þmr
l2rminðVA0Þ
lrmaxðVB0Þ þqr
l2rminðVB0Þ
¼ X
y
m¼m0
lrmaxðVA0Þ þmr
l2rminðVA0Þ
! Xy
q¼q0
lrmaxðVB0Þ þqr
l2rminðVB0Þ
!
<y:
Then for eache>0,
PðkV1
A0 ATCCB~ TVB01k>eÞa
1
e2rEkV
1
A0 ATCCB~ TVB01k 2r
and by Borel-Cantelli lemma with probability one the event
Dmq¼ fkVA01ATCBC~ TVB01k>eg
happens only for finite number of indices m and q. Then almost surely there exists m1¼m1ðoÞ and q1¼q1ðoÞ, such that for all mbm1, qbq1,
kV1
A0 ATCCB~ TVB01kae.
This means thatV1
A0 ATCCB~ TVB01 !0 a.s., asm!y,q!y.
We proved that in (14) to (16) the convergence is with probability one and Theorem 2 is proved. r
10.5 Proof of Lemma 3
We have
TAWA¼
1 t f
T
tqCTCftq p1ffiffitftqTCTA 1ffiffi
t
p ATCftq ATAV~
A A
" #
¼ 1ffiffi t
p C0ftq A0
T
1 ffiffi t
p C0ftq A0
þ
1 tftqTCC~
TCCf~ tq 0 0 0 þ 1 t f T
tqðC0TCC~þCC~ TC
0Þftq p1ffiffit ftqTðC0TAA~þCC~ TA
0Þ 1ffiffi
t
p ðAA~TC0þAT0CÞC~ ftq AT0AA~þAA~ TA
0þ ðAA~TAA~VAA~Þ
2 4
3 5
vH1þH2þH3:
10.5.1 Behavior ofH1
We haveH1b0, andH1 ¼
" H0
11 H120
H210 H220 # ; 1 mH 0 22¼ 1 mA T
0A0!VAy>0; see assumptionðviiÞ:
10.5.2 Behavior ofH2
We haveH2¼
H1100 0 0 0 , 1 mH 00 11¼ 1 mt Xm
i¼1
Xt
k¼1
~ ccik
Xt
l¼1
~ ccil¼
1 mt
X
1aiam 1akat
~ ccik2 þ 2
mt X
1aiam 1ak<lat
~
ccikcc~ilvSAþSB:
We have
1 4ES
2 B¼
1 m2t2
X
1aiam 1ak<lat
Eð~cc2
ikÞEð~ccil2Þaconst
mt2
m2t2!0 asm!y;q!y:
Next, by assumption (xv) and by the law of large numbers
SA!Ecc~112 a:s: asm!y;q!y
H2! Ecc~2
11 0
0 0 " #
a:s:
10.5.3 Behavior ofH3
We prove that 1 mH3!
p
0. We writeH3¼
H11000 H12000 H21000 H22000
,
a).
1
m2E
1 tf
T tqC
T 0CCf~tq
2
¼ 1
m2E
1 tf
T tqCC~
TC 0ftq
2
¼ 1
m2t2E
Xm
i¼1
Xt
k¼1
c0ikX
t
l¼1
~ ccil
!2
¼ 1
m2t2
Xm
i¼1
Xt
l¼1
E~cc112 X
t
k¼1
cik0 !2
aconst 1 m2
Xm
i¼1
Xt
l¼1
ðc0 ikÞ
2
aconst 1
m2lmaxðVA0Þlmax
Xt
i¼1
bi0b0Ti !
aconst t
m!0;
becauset¼oðp3ffiffiffiffimÞ. ThusH000
11 ! p
0. b).
1
m2E
1 ffiffi t
p AA~TC0ftq
2 ¼ 1
m2tE
Xn
k¼1
Xm
i¼1
~ a aik
Xt
l¼1
c0il !2
aconst 1 m2t
Xn
k¼1
Xm
i¼1
Xt
l¼1
cil0 !2
aconst 1 m2
Xm
i¼1
Xt
l¼1
ðc0 ilÞ
2
aconst t
c).
1
m2E
1 ffiffi t p AT0CCf~tq
2 ¼ 1
m2tE
Xn
k¼1
Xm
i¼1
aik0 X
t
l¼1
~ ccil
!2
¼ 1
m2t
Xn
k¼1
Xt
l¼1
E~cc112 X
m
i¼1
a0ik !2
aconst 1 m2
Xm
i¼1
Xn
k¼1
ða0 ikÞ
2
aconst t
m!0:
From b) and c) we haveH12000!p 0,H21000!p 0. d). It was shown above thatH000
22! p
0, see section 10.1. Finally,H3! p
0.
10.5.4 End of proof
Summarizing Subsection 10.5.3, we have 1
mH3
F ¼ ffiffiffiffi t m r
Opð1Þ:
We need to know the behavior of the other blocks ofH1.
1 mH 0 11 ¼ 1 mt Xm
i¼1
Xt
l¼1
cil0 !2
a 1
m Xm
i¼1
Xt
l¼1
ðc0 ilÞ
2
aconstt:
1
mH
0
21¼
1 mpffiffitA
T
0C0ftq¼
1
mA
T 0A0
1 ffiffi t
p X0B0ftq;
1 mH 0 21 F
aconstpffiffit;
and 1 mH 0 12 F ¼ 1 mH 0 21 F
We consider the matrix
MAv
1
mðH1þH2Þ:
It is positive semidefinite and we look fore0>0 such thatMAbe0t Inþ1 with
probability tending to one. We have
MA
e0
t Inþ1¼
1 mH
0
11þ m1H
00 11 e0 t 1 mH 0 12 1 mH 0
21 m1H
0
22 e0
t In
" #
:
Now, formbm0
1
mH
0
22
e0
t Inb 1
2lminðVAyÞ
e0
t
Inb
1
2lminðVAyÞ e0
In
b1
4lminðVAyÞ; ife0a 1
4lminðVAyÞ:
We apply Silvester’s criterion to the matrixMAe0t Inþ1. We have for
e0a
1
4lminðVAyÞ; ð52Þ
det MA
e0
t In
¼det 1
mH1
þ 1 mH 00 11 det 1 mH 0 22 e0
t In
þe0Oð1Þ:
ð53Þ
The last term comes from 1 mH
0
11det m1H
0
22 e0
t In
and from the product of componentsm1H210 ,m1H120 ande0t In. In both cases we havete0t Oð1Þ ¼e0Oð1Þ.
Now, 1
mH1b0, therefore (53) implies
det MA
e0
t Inþ1
b 1
mH
00
11det
1
mH
0
22
e0
t In
const1e0;
with some const1>0, and a.s. we have
lim inf
m!y q!y
det MA
e0
t Inþ1
bEcc~112 detðVAyÞ const1e0>0;
if
e0<
1 const1
Ecc~112 detðVAyÞ: ð54Þ
Therefore ife0satisfies (52) and (54) then
MA
e0
with probability tending to one, and
lminðMAÞb
e0
t ;
with probability tending to one. We have
lmin
1
mðTAWAÞ
blminðMAÞ
1
mH3
blminðMAÞ
ffiffiffiffi t m r
Opð1Þ;
and with probability tending to one we have
lminðTAWAÞb
e0
t
ffiffiffiffi t m r
Opð1Þ:
But with probability tending to one
e0
t
ffiffiffiffi t m r
Opð1Þ>0,
ffiffiffiffi m t3
r
e0>Opð1Þ;
and the last holds because by assumptionm
t3!y. ThusTA>WAwith
prob-ability tending to one. Lemma 3 is proved. r
Acknowledgements. We thank two anonymous reviewers for their suggestions and corrections.
A. Kukush is supported by a postdoctoral research fellowship of the Belgian o‰ce for Scien-tific, Technical and Cultural A¤airs, promoting Scientific and Technical Collaboration with Cen-tral and Eastern Europe.
S. Van Hu¤el is a full professor with the Katholieke Universiteit Leuven. I. Markovsky is a research assistant with the Katholieke Universiteit Leuven.
This paper presents research results of the Belgian Programme on Interuniversity Poles of Attraction (IUAP V-22), initiated by the Belgian State, Prime Minister’s O‰ce – Federal O‰ce for Scientific, Technical and Cultural A¤airs of the Concerted Research Action (GOA) projects of the Flemish Government MEFISTO-666 (Mathematical Engineering for Information and Com-munication Systems Technology), of the IDO/99/03 project (K.U. Leuven) ‘‘Predictive computer models for medical classification problems using patient data and expert knowledge’’, of the FWO projects G.0078.01, G.0200.00, and G0.0270.02.
The scientific responsibility is assumed by its authors.
References
[Bar00] Baran S (2000) A consistent estimator in general functional errors-in-variables models. Metrika 51(2):117–132
[CRS95] Carroll RJ, Ruppert D, Stefanski LA (1995) Measurement error in nonlinear models. Number 63 in Monographs on Statistics and Applied Probability. Chapman & Hall/ CRC
[CS98] Cheng C, Schneeweiss H (1998) Polynomial regression with errors in the variables. J. R. Statistical Society B (60):189–199
[CST00] Cheng C, Schneeweiss H, Thamerus M (2000) A small sample estimator for a polyno-mial regression with errors in the variables. J. R. Statistical Society (62):699–709 [Ful87] Fuller WA (1987) Measurement error models. New York: Wiley
[GV80] Golub GH, Van Loan CF (1980) An analysis of the total least squares problem. SIAM J. Numer. Anal. (17):883–893
[KM00] Kukush A, Maschke E-O (2000) The e‰ciency of adjusted least squares in the linear functional relationship. Discussion Paper 208, SFB 386, Ludwig-Maximilians-University of Munich
[KMV01] Kukush A, Markovsky I, Van Hu¤el S. Consistent fundamental matrix estimation in a quadratic measuremnt error model arising in motion analysis. Technical Report 01-64, Dept. EE, K.U. Leuven, 2001. Accepted for publication in Computational Statistics and Data Analysis, Special Issue of Matrix Computations and Statistics
[KZ96] Kukush A, Zwanzig S (1996) On inconsistency of the least squares estimator in non-linear functional error-in-variables models. Preprint N96-12, Institut fu¨r Mathemati-sche Stochastik, Universita¨t Hamburg
[MM98] Mu¨hlich M, Mester R (1998) The role of total least squares in motion analysis. In Burkhardt H (ed) Proc. European Conference on Computer Vision (ECCV’98), Springer Lecture Notes on Computer Science, pages 305–321. Springer-Verlag, June [Ros70] Rosenthal HP (1970) On the subspaces ofLpðp>2Þspanned by sequences of
inde-pendent random variables. Isr. J. Math. (8):273–303
[VV89] Van Hu¤el S, Vandewalle J (1989) Analysis and properties of the generalized total least squares problemAXABwhen some or all columns inAare subject to error. SIAM J. Matrix Anal. 10(3):294–315